
基于捷联导引头去耦问题惯测注入方法研究
2021-03-09 09:19:20赵书占褚建川吴根水
激光与红外 2021年2期
赵书占,许 轲,2,褚建川,2,吴根水,2
(1.中国空空导弹研究院,河南 洛阳 471009;2.航空制导武器航空科技重点实验室,河南 洛阳 471009)
1 引 言
随着仿真技术的发展与进步,半实物仿真越来越多地应用于武器研制定型试验中。半实物仿真作为导弹打靶前的重要验证环节,在导弹研制定型过程中作用日益重要,半实物仿真系统要具备全面考核导弹性能的能力[1-10]。半实物仿真系统主要由仿真试验总控制台、弹道仿真计算平台、目标模拟系统、飞行模拟转台及其控制机构五大部分组成。各部分通过光纤反射内存卡完成组网,实时共享信息。半实物仿真系统组成框图如图1所示:现有半实物仿真系统中,导弹的空中姿态运动通过三轴飞行转台进行模拟,目标相对导弹的运动即弹目视线角运动由目标模拟系统模拟。随着导弹探测能力的提升,目标机动能力的增强,以及导弹算法中大多设计了爬高弹道以适应更远的射程需求[11-12],这使得导弹在飞行过程中的姿态角变化范围大幅度增大。在进行弹目视线角的模拟时,必须采取系统零位预偏的方法,即便如此,也对转台的转动范围提出了更高需求,在实际仿真过程中,往往超出转台的设备转动极限。即预偏后,导弹在飞行过程中,导弹姿态角度变化范围超出现有仿真试验室飞行转台的转动范围。因此必须相应的提升转台的能力,随着而来就是系统建设成本和使用维护难度的急剧增加。
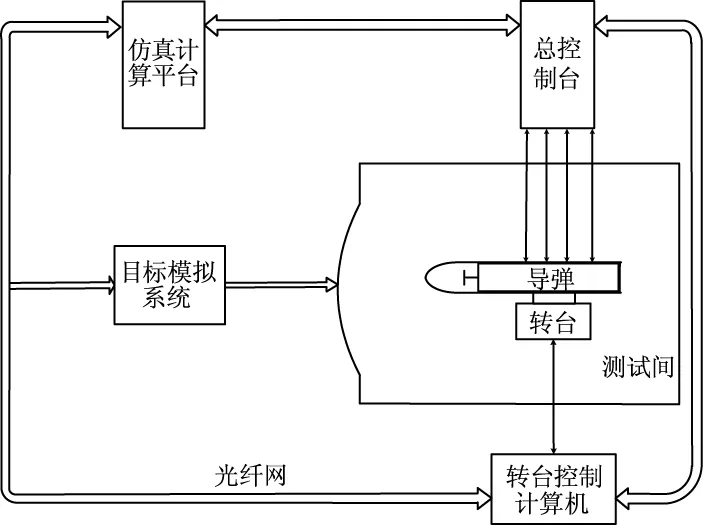
图1 半实物仿真系统示意图
捷联导引头具备结构简单、重量轻、体积小、成本低、可靠性高等优点,因此广泛应用于新型导弹上,然而由于捷联导引头固联安装于弹体上,测得的角度信息与弹体姿态完全耦合,不能直接得到可用于制导的有用信息,因此需要对真实弹体姿态信息进行导引头解耦合[13-17]。
因此本文结合自身系统特点,同时基于捷联导引头去耦问题考虑,设计了一种惯测注入式仿真方法提升系统能力,解决这一问题。
2 惯测注入仿真方法原理
弹目视线模拟是通过目标模拟系统实现的,也是导弹导引系统的唯一测量输入。按现有制导半实物仿真技术,一般在目标视线角超出目标模拟范围时进行系统零位预偏,使其落入目标模拟范围,此时导弹姿态模拟的零位对应调整,以扩展半实物仿真系统的能力。因此本注入仿真方法的前提是导弹末制导段目标模拟视场范围满足弹目视线变化范围。主要设计流程为:以惯测全注入方式模拟导弹线运动和角运动,使导弹姿态与转台运动分离,然而由于导引头必须使用真实陀螺的测量值解算弹体角运动耦合,所以无法全程使用设备注入值。因此本文提出了一种在中制导阶段将导弹飞控组件所需要的角运动信息通过脉冲注入方式实现,而将末制导段导弹导引头所需要的角运动信息仍通过陀螺实际测量得出的设计方案。这样既使得中制导段导弹的姿态与转台运动相分离,使得末制导阶段转台随动状况良好,并且巧妙避免了捷联导引头解耦合问题的复杂化,增大了半实物仿真系统可以仿真的导弹姿态角度变化范围。
根据这一特点,设计惯测注入方案:借用舵机给飞控组件的信息通道把惯测模拟的脉冲数(包括加速度计测量的加速度和陀螺测量的角速度)以数值的形式通过该信息通道注入飞控组件信息处理单元。该方案具体内容如下:
1)飞控组件只使用设备的加速度脉冲数注入值进行导航、制导和控制计算;
2)飞控组件同时接收设备的角速度脉冲数注入值和真实陀螺的测量值,前者用于飞控组件的导航、制导和控制计算,后者送给导引头用于解弹体角运动耦合;
3)设备实时采集飞控组件发出的舵控信号并送到仿真模型计算,经舵机模型和稳定回路模型的计算结果由设备转成脉冲数写入飞控组件;
在这种方法下,半实物仿真系统闭合框图如图2所示:产品惯测输出的舵控指令由仿真调度系统的舵控采集设备采集收到,实时解码后送给仿真模型,仿真模型经过舵机模型和动力学模型,结合其他相关的遥测信息,计算得到弹体动力学响应,输出导弹加速度和角速度信息,送到脉冲注入设备,实时转化成脉冲数经由脉冲通道注入飞控信息处理单元,实现系统闭合。

图2 半实物仿真系统注入方法闭合框图
3 惯测注入仿真方法设计实现
3.1 注入模块设计
注入模块主要完成对惯测单元的信息采集,根据编解码规则,对采集的信息进行解析,解出相关的舵偏指令,然后实时写光纤,作为仿真机计算的输入;注入模块根据仿真机计算输入的加速度角速度信息,进行脉冲转换,输入给飞控组件;注入模块根据采集的信息模拟舵机与飞控组件的信息交互,完成产品自检。
通过以上分析,需要在现有半实物仿真系统增加一个惯测模块,该模块需要有惯测采集注入卡,光纤反射内存卡,控制计算机及控制软件开发,以及给飞控组件注入的接线。惯测注入模块示意图如图3所示。

图3 惯测注入模块示意图
3.2 仿真机模型设计
仿真机模型需要的传统模型设计上增加舵机模型和优化动力学计算单元和转台控制单元。舵机模型根据注入模块解码的舵偏指令完成舵机舵偏角的计算。动力学计算单元利用输入的舵偏角以及遥测信息,通过对气动参数的插值计算、发动机推力计算、阻力计算,完成导弹的线加速度、角加速度计算输入给惯测注入模块。同时仿真模型计算出导航的姿态角及发送给转台的角位置。以前的仿真模型是将导弹姿态信息发送给飞行转台,转台接受姿态信息后开始转动,由弹上的陀螺去敏感转台转动过程中所产生的角速度信息,从而积分得到角度信息。在采用惯测注入方法后,弹体的姿态信息和转台转动信息是相隔离的,需要考虑转台位置限幅对注入的角速度的影响。
基于以上分析,仿真机计算平台无需硬件改动,只需在原有模型基础上增加新的软件模块,硬件成本几乎可以忽略。仿真机模型计算示意图如图4所示。
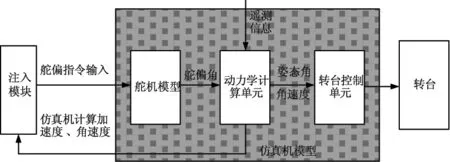
图4 仿真机模型示意图
4 惯测注入式仿真方法验证
为了验证上述仿真模型设计的有效性,开展了半实物仿真试验,具体试验方法如下,根据数字弹道仿真,预先计算出弹道全部飞行过程的姿态角变化范围,末制导段弹道的姿态角变换范围和弹目视线变换范围。预置转台到固定角度,使得末制导段弹道的姿态角变换范围和弹目视线变换范围满足现有半实物仿真系统能力。仿真机转台控制逻辑为,当前时刻转台角度超过预置角度转台不动,进入转台角度范围内,开始随动,保证末制导段导引头组件使用真实信息进行解耦。具体仿真曲线如图5、6、7、8所示(以Y方向为例)。
由图5可以看出,转台姿态角与弹体姿态角是相分离的,初始阶段,转台处于预置固定角度,而产品的姿态信息是仿真模型计算的数据值通过脉冲信号注入给产品得来的。弹体姿态角和仿真计算的姿态角一致。从图6、图7中可以看出,仿真机计算的注入角速度和加速度信息和产品感知的角速度信息一致,证明惯测注入信息准确。图8可以看出仿真机计算的框架角和导引头感知的框架角一致。整个试验完成闭合,惯测注入仿真是可行的。
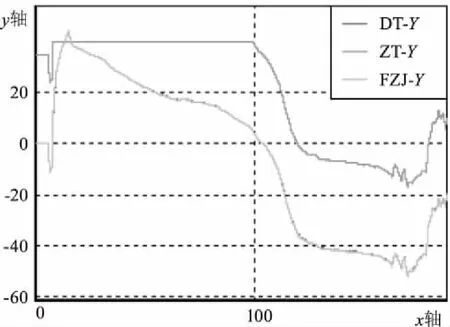
图5 注入角、转台角、弹体感知角对比

图6 注入角速度和弹体感知角速度对比
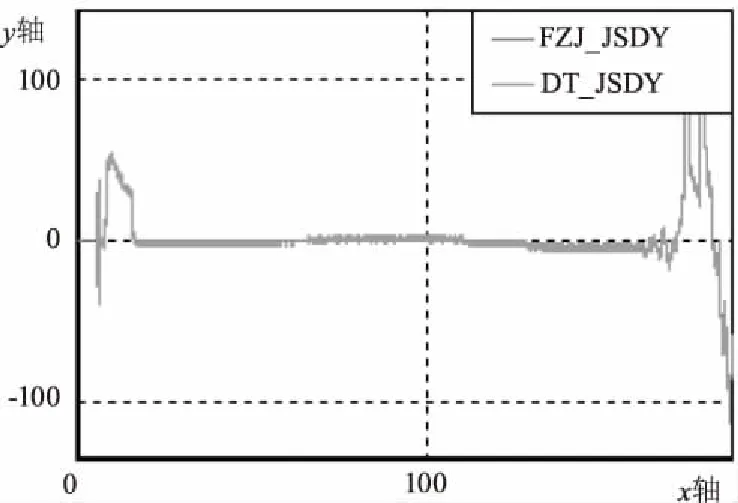
图7 注入加速度和弹体感知加速度对比
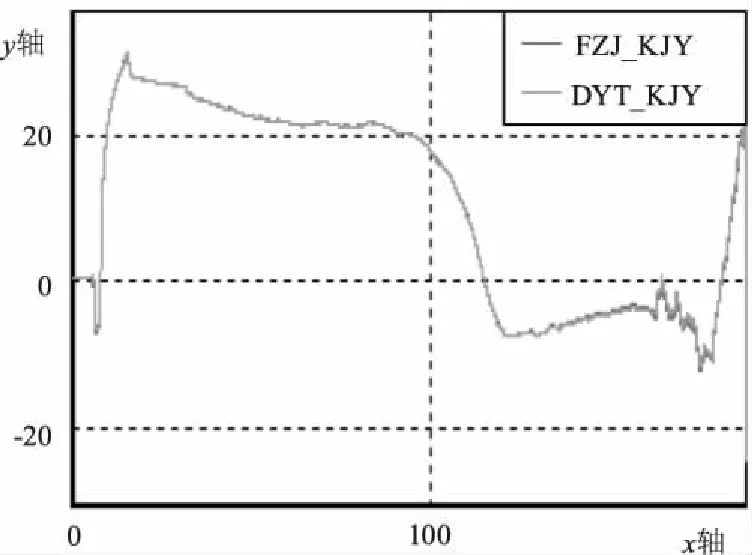
图8 仿真机计算框架角和导引头框架角对比
5 结 论
经过验证,惯测注入式仿真方法可以提升半实物仿真试验系统的能力,提高可仿真的导弹姿态角度变化范围,且成本增加有限,但该方法只适用于导弹末制导段目标模拟视场范围满足弹目视线变化范围,末制导段随动,保证捷联导引头解耦信息真实感知。
猜你喜欢
兵器装备工程学报(2022年7期)2022-08-10 03:37:18
爆炸与冲击(2022年2期)2022-03-17 07:28:44
民用飞机设计与研究(2019年2期)2019-08-05 01:33:42
电子测试(2018年23期)2018-12-29 11:11:36
上海煤气(2018年6期)2018-03-07 01:03:22
中国公共安全(2017年7期)2017-10-13 08:18:11
计算机测量与控制(2017年6期)2017-07-01 16:24:24
制导与引信(2016年3期)2016-03-20 16:01:58
火控雷达技术(2016年1期)2016-02-06 02:18:01
弹箭与制导学报(2015年1期)2015-03-11 15:32:08
