圆筒型横向磁通直线电机式主动悬架作动器的设计
2021-03-05 14:03:56丁轲古玉锋张国庆
汽车实用技术 2021年4期
丁轲,古玉锋,张国庆
圆筒型横向磁通直线电机式主动悬架作动器的设计
丁轲,古玉锋,张国庆
(长安大学 道路施工技术与装备教育部重点实验室,陕西 西安 710064)
针对现有车用主动悬架作动器存在的输出力密度低、控制精度差、效率低等问题,提出了一种圆筒型横向磁通直线电机作动器。在分析电机作动器的基础上,搭建了路面激励模型、1/4主动悬架数学模型以及LQG控制器模型,利用Matlab/Simulink进行仿真得出主动悬架作动器的主动力设计目标。将该设计目标与圆筒型横向磁通直线电机作动器的Maxwell软件电磁力仿真结果进行对比分析,结果表明,主动悬架作动器的主动力设计目标与Maxwell仿真得到的电磁力数值基本吻合,为横向磁通直线电机应用于主动悬架的可行性进行了验证。
主动悬架;横向磁通;作动器;有限元分析
前言
主动悬架可以自动地调节悬架的刚度和阻尼,可以回收悬架系统振动的能量,既满足汽车的行驶平顺性,又节能环保。作动器性能的好坏与主动悬架性能好坏密切相关,对于作动器的研究越发重要。直线电机式作动器,可以部分或者完全替代悬架中的弹簧和减振器,实时调节悬架所需要的主动控制力。但是直线电机的缺点是输出力密度较低。传统轴向和径向磁路的直线电机,磁通经过的齿部和电枢绕组所在的槽在同一截面上,磁力线所在平面平行于电机的旋转方向,导致槽宽与齿宽相互制约,电机力密度难以得到根本提高。而横向磁通直线电机由于其主磁通所在的平面与运动方向垂直,齿宽和槽宽相互独立不受影响,其力密度可以得到提升,更能发挥出电机的功能特性。
目前对于各类直线电机的研究也取得了一些成绩。文献[1]设计了一种双定子空心圆筒型永磁直线电机作动器,通过电机的仿真优化证明了极对数为2,绕组配置为积分槽型,磁体为准Halbach型时,电机具有最大推力,但未对该种电机的漏磁情况做具体说明[1]。文献[2]研究了横向磁通永磁直线电机的气隙磁场分布,将推力密度和推力波动作为优化目标,优化设计了电机的主要结构参数[2]。文献[3]提出了一种圆筒型横向磁通同步发电机来实现高线性,描述了电机的基本构型,并对三种不同次级数的模型进行了解释,在给定的横截面范围内,考虑了电枢铁心中次级线圈的数目,得到了最优设计[3]。由已有文献可知,横向磁通直线电机主要研究其结构参数优化及提高其力密度的方法,并将其作为发电机应用于汽车驱动上,对于将横向磁通直线电机用于主动悬架上的研究较少。本文提出了一种圆筒型横向磁通直线电机作动器,并将LQG控制应用于主动悬架系统,运用Matlab仿真,得到了作动器设计目标,在此基础上对直线电机作动器进行了结构设计,并进行了有限元仿真,验证了横向磁通直线电机用于主动悬架上的可行性。
1 悬架模型
1.1 主动悬架动力学模型
1/4车辆主动悬架模型如图1所示[4],图中为簧载质量、为非簧载质量、为悬架弹簧刚度、为减振器阻尼系数、为轮胎刚度,为作动器主动力等,图中2表示簧载质量的垂向位移,1表示非簧载质量的垂向位移,0表示路面激励。
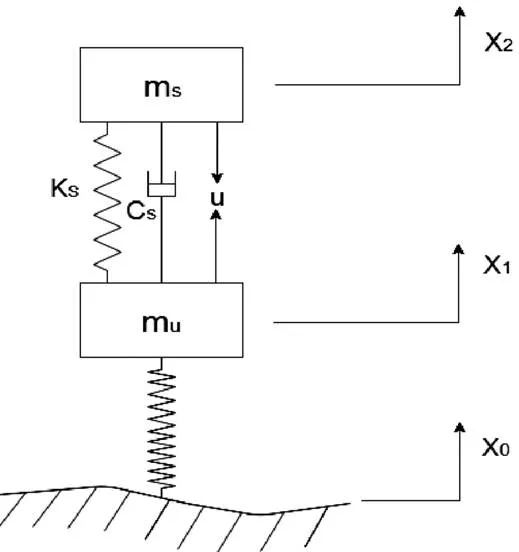
图1 1/4主动悬架模型
1/4主动悬架的动力学方程为:

状态方程为:
则:

1.2 路面激励
选取滤波白噪声来生成路面激励:

式中,f0为下截止频率,f0=0.1Hz;x0(t)为路面位移;G0为路面不平度,G0=64×10-6m-3;u0为速度,u0=20m/s;w(t)为高斯白噪声输入矩阵。在Matlab/Simulink里建立的路面激励仿真模型如图2所示。
1.3 LQG最优主动悬架控制器的建立
汽车悬架动力学性能评价指标主要包括:簧上质量垂直加速度、悬架动挠度以及轮胎动载荷。综合以上因素,建立悬架的综合性能指标函数如下[5]:

式中:1为簧载质量垂向振动加速度加权系数,2为悬架动挠度加权系数,3为轮胎动载荷加权系数。
将综合性能指标写成矩阵形式为:

最优控制反馈增益矩阵K由黎卡提(Riccati)方程求出:

调用Matlab中的程序[K P E]=lqr(A,B,Q,R,N)即可得最优反馈增益矩阵K、黎卡提方程的解P及特征根E。当=-时,综合性能指标J取最小值,可得到最优控制力U的值。
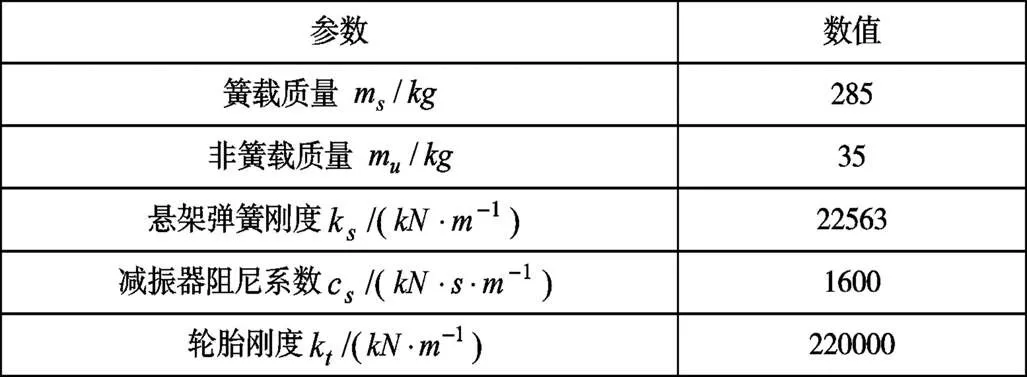
在matlab/simulink里建立了主动悬架仿真模型,车辆模型参数如表1所示,主动悬架仿真模型如图3所示。
表1 车辆模型主动悬架参数
仿真结果如下:
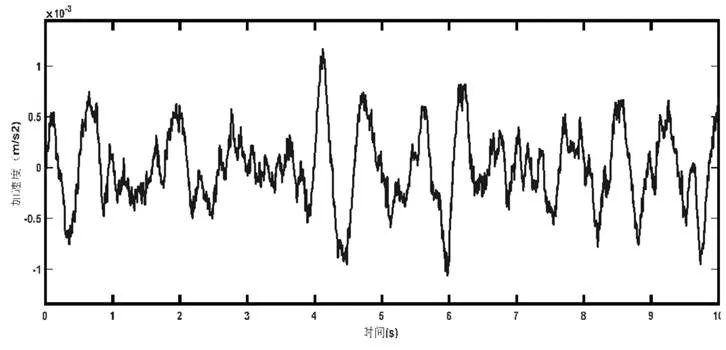
图4 主动悬架垂向加速度
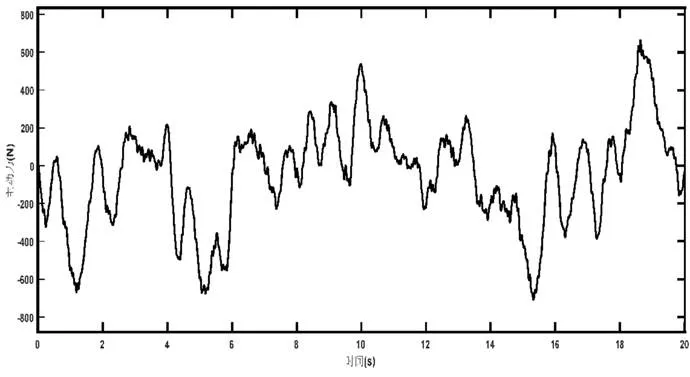
图5 悬架主动力
由图4可知LQG控制下的主动悬架垂向加速度的值较小,满足车辆的平顺性要求。由图5可知,汽车在C级路面20m/s的车速条件下,主动控制力最大值为678N,即汽车悬架所需要的的推力为678N,以此值作为作动器输出力的目标。
2 电磁作动器的设计与有限元仿真
2.1 作动器结构设计
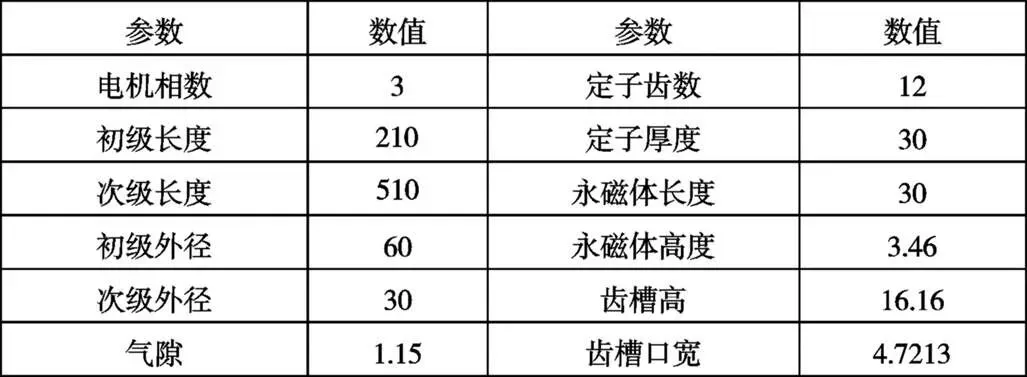
横向磁通电机内的磁场是一个三维场,本文采用Max -well 3D软件建立模型并进行有限元分析[6]。该作动器由定子铁芯、转子、永磁体和线圈组成,结构示意图如图6所示,其中定子铁芯采用硅钢片叠压而成,材料为M19-24G,转子也采用此材料。该种材料具有较大的磁导率和较小的阻抗;永磁体材料采用NdFe30,径向充磁,相邻磁极磁性相反[7];绕组材料为copper,每相线圈为300匝。该电机采用三相结构,各相互差120°电角度。在圆周方向上,定子齿数和动子极数相同均为12,动子永磁体采用表贴式,极性交替排列,绕组采用集中绕组,有利于提高电机效率。电机具体的技术参数如下表2所示。
表2 电机作动器技术参数 mm
2.2 基于Ansys Maxwell的电磁作动器有限元建模及仿真
直线电机作动器的主磁通是从永磁体的N极开始,穿过气隙,再穿过定子齿部进入到定子铁芯内,然后再越过与之相邻的定子齿部和气隙回到永磁体的S极,形成闭合回路,构成电机的磁路[8]。
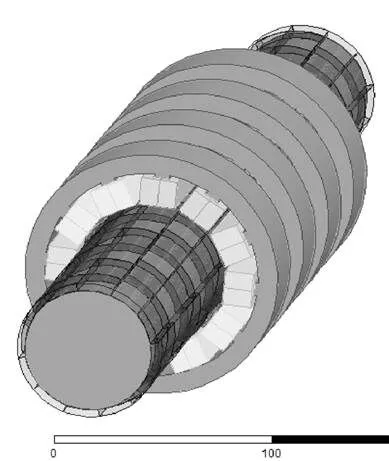
图6 横向磁通直线电机结构示意图
横向磁通直线电机的简化磁场强度分布情况如图7所示,由图7可看出,该电机磁场分布均匀,形成了完整的闭合回路,无漏出情况;磁场矢量集中在转子永磁体和定子相邻齿槽间隙形成的区域内,由此通电绕组在磁场中运动产生力,推动电机的运动。
将作动器0.005s和0.047s运动时的磁感应强度变化情况进行分析来验证该电机模型的正确性。由图7可以看出,作动器在两个瞬时时间的磁感应强度主要集中在定子齿部和转子部分。当t=0.005s时定子齿部的磁感应强度为1.6025T,转子部分的磁感应强度为5×10-3T;当t=0.047s时,定子齿部的磁感应强度集中分布在1.0718T至1.4718T,转子中心及定子铁芯内部的磁感应强度大多集中在5.0142×10-3T至5.3840×10-1T,两个瞬时时刻的磁感应强度相一致,较大的值集中在定子齿部,较小的值集中在转子中心及定子铁芯内部区域,说明定子齿部是作动器受力较大的部位。
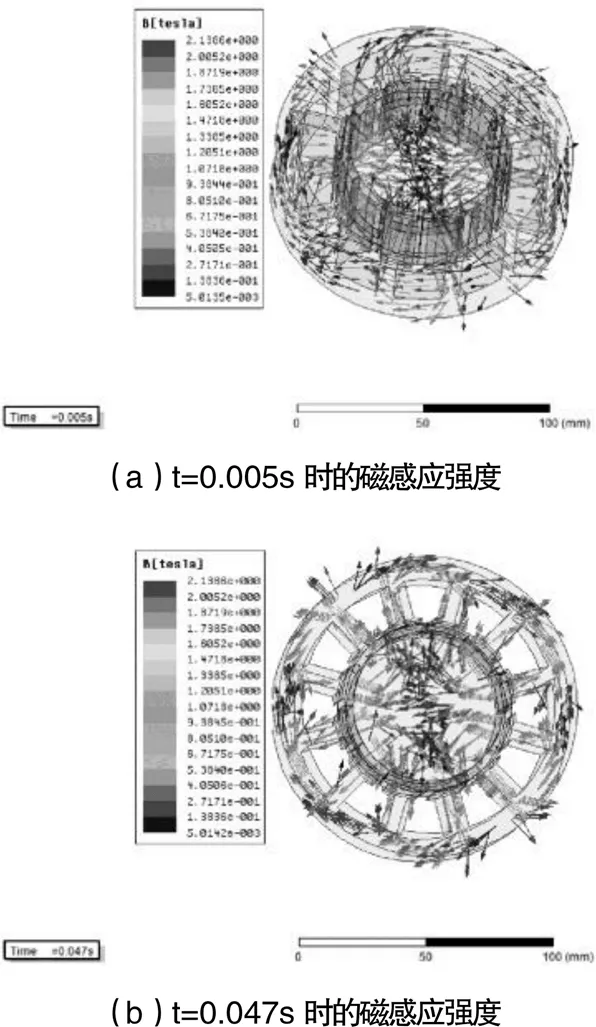
图7 作动器简化模型磁场强度
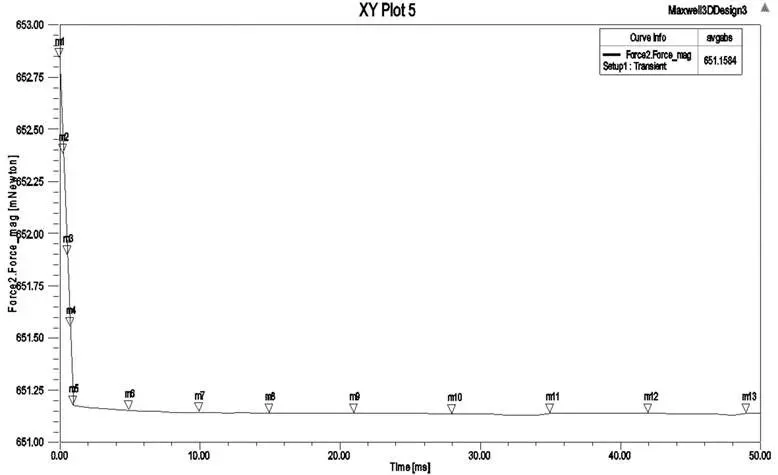
图8 横向磁通直线电机作动器电磁力
由图8可知,该电机作动器的电磁力输出最大为652.87N,经过0.97s以后,下降到651.1739N并且随着时间的增加,数值稳定在651.1N左右。由此说明,该电机的电磁推力为651N左右,该数值与悬架的主动控制力数值基本吻合,进一步验证了悬架作动器电机模型的正确性。
3 结论
(1)建立1/4主动悬架模型,根据悬架动力学方程、路面白噪声激励和LQG最优控制建立了Matlab/Simulink模型,得到了最优控制下的悬架主动力,并以此为目标来设计作动器。
(2)根据横向磁通电机的参数建立了直线电机Maxwell 3D模型,对其进行瞬态电磁场有限元分析,通过分析作动器内部的磁场分布验证了模型结构设计的合理性;通过对比分析作动器0.005s和0.047s运动时的磁感应强度验证了该电机模型的正确性;将线圈绕组磁场与永磁体磁场相互作用产生的电磁力与悬架设计目标中的主动力进行对比,两个数值基本吻合,进一步验证了悬架作动器电机模型的正确性。
(3)本设计考虑了圆筒型横向磁通直线电机应用于主动悬架充当作动器的可行性,下一步需要分析横向磁通电机结构参数例如永磁体磁化方向、定子铁芯单元轴向长度等对于电磁力的影响。
[1] Yiming Shen, Qinfen Lu, Yunyue Ye. Double-stator air-core tubular permanent magnet linear motor for vehicle active suspension systems[C].IEEE Vehicle and Propulsion Conference,2016:1-6.
[2] 赵玫,邹继斌,王骞,杨洪勇,刘慧霞.圆筒型横向磁通永磁直线电机的基础研究[J].电工技术学报,2014,29(S1):80-89.
[3] Ryuji Watanabe, Jung-Seob Shin, Takafumi Koseki. Optimal design for high output power of transverse-flux-type cylindrical linear synchronous generator[J]. IEEE Transactions on Magnetics,2014, 50(11):1-4.
[4] 汪若尘,谢健,叶青,孟祥鹏,陈龙.直线电机式主动悬架建模与试验研究[J].汽车工程,2016,38(04):495-499.
[5] 任全.车辆直线电机式主动悬架作动器研究[D].西安科技大学, 2018.
[6] 胡堃,邓先明,叶宗彬.基于Maxwell 3D磁场分析的直线电动机仿真实验[J].实验室研究与探索,2017,36(11):107-109+125.
[7] Ryuji Watanabe, Jung-Seob Shin, Takafumi Koseki. Optimal design for high output power of transverse-flux-type cylindrical linear synchronous generator[J]. IEEE Transactions on Magnetics,2014,50 (11):1-4.
[8] 于斌.圆筒型错齿结构横向磁通永磁直线电机的研究[D].哈尔滨工业大学,2016.
Design Of Cylinder Type Transverse Flux Linear Motor Actuator For Active Suspension
Ding Ke, Gu Yufeng, Zhang Guoqing
(Key Laboratory for Highway Construction Technology and Equipment of Ministry of Education,Chang'an University, Shaanxi Xi'an 710064)
Aiming at the problems of low output force density, poor control accuracy and low efficiency of existing vehicle active suspension actuators, a cylindrical transverse flux linear motor actuator is proposed. Based on the analysis of motor actuator, the road excitation model, 1/4 active suspension mathematical model and LQG controller model are built. The active force design target of active suspension actuator is obtained by Matlab/Simulink simulation. The design objective is compared with the electromagnetic force simulation results of Maxwell software of cylindrical transverse flux linear motor actuator. The results show that the design objective of active suspension actuator is basically consistent with the electromagnetic force value obtained by Maxwell simulation, which verifies the feasibility of applying transverse flux linear motor to active suspension.
Active suspension; Transverse flux; Actuator; Finite element analysis
10.16638/j.cnki.1671-7988.2021.04.021
U462.1
B
1671-7988(2021)04-68-04
U462.1
B
1671-7988(2021)04-68-04
丁轲,就职于长安大学道路施工技术与装备教育部重点实验室。
猜你喜欢
大电机技术(2022年2期)2022-06-05 07:28:34
装备制造技术(2020年9期)2021-01-26 00:14:42
数学大王·低年级(2020年8期)2020-08-14 09:54:30
传感器与微系统(2018年7期)2018-08-29 00:44:20
电测与仪表(2017年24期)2017-12-19 05:15:18
西安航空学院学报(2017年3期)2017-07-05 14:58:36
北京航空航天大学学报(2016年2期)2016-12-01 03:00:27
电测与仪表(2015年3期)2015-04-09 11:37:52
浙江大学学报(工学版)(2015年8期)2015-03-01 01:19:26
机械制造与自动化(2014年1期)2014-03-01 04:21:46