
分布式软目标雷达特性与感知技术述评
2021-03-04 13:45李健兵王雪松
雷达学报 2021年1期
李健兵 王雪松
(国防科技大学电子科学学院电子信息系统复杂电磁环境效应国家重点实验室 长沙 410073)
1 引言
雷达是以电磁波为“尺子”实现目标探测的装置,最初的目的是检测目标的存在并测量其距离。随着雷达技术的发展,人们已经发展多种模式的雷达,并能够从雷达信号中提取出比距离更多的信息,使得雷达成为防空反导、资源勘察、对地观测等军民用领域中最重要的传感器之一[1]。从雷达探测的目标体来看,人们关注比较多的还是飞机、舰船等传统目标,并针对这类目标的特点发展了一系列雷达信号与数据处理方法来更好地去除干扰因素和提高探测性能。但是随着应用需求的发展和雷达探测功能的进一步细化,分布式软目标的雷达特性与感知问题越来越引起人们的关注。
从学术内涵来看,分布式软目标的雷达特性与感知技术包括几个关键词:“分布式”是指这类目标的空间尺度大,跨多个距离单元或角度单元;“软目标”是指这类目标具有时变的空间分布或内部相对运动,这有别于飞机、舰船等通常的硬目标;“雷达”既包括微波雷达,也包括激光雷达,这是遥感探测领域最重要的两种传感器;“特性”既包括目标对电磁波散射,也包括电磁波在目标中传播时的幅度、相位、极化变化等效应;“感知”包括对目标的探测、成像和参数反演3个方面,其中探测是在噪声和杂波中检测到目标,成像是根据回波特征获取某一区域内目标散射点的空间分布,反演是根据散射方程还原目标的电参数乃至其他物理参数的分布。
基于上述内涵可知,这类目标的外延很广,典型的代表包括飞机尾流、箔条云团、昆虫群、复杂风场、云雾雨雪等,具有广泛的军民用研究需求。
(1) 飞机尾流:飞机尾流是飞机飞行时在其后方产生的一对反向旋转的强烈漩涡,具有空间尺度大、持续时间长、运动强烈、内部组成和运动复杂等特点[2]。飞机尾流可能对尾随飞机的飞行安全产生巨大威胁,其雷达探测是军民用航空安全领域十分关注的问题;同时,由于任何飞机飞行时都不可避免地产生尾流,因此其雷达探测在反隐身领域具有重要的应用潜力,美国空军亦将飞机尾流探测作为反隐身飞机的重要手段进行研究。
(2) 箔条云团:箔条通常是一种表面镀铝的玻璃丝,半波长左右的箔条对雷达波具有较强的散射效率,大量箔条组合在一起构成箔条云团,其内部各箔条的运动、指向、疏密等受到空气阻力等影响而不断变化,构成复杂的干扰图画,在近地空战、海上舰船自卫、弹道导弹突防等方面具有重要的应用[3]。
(3) 昆虫群:昆虫群的飞行演化特征与监视是农业病虫害预防中的重要问题。比如2019—2020年,多达4×1011只的沙漠蝗虫从非洲肯尼亚等地一路随风迁移,飞越红海、波斯湾,抵达巴基斯坦和印度,沿路不断繁殖和吞噬当地农作物,给农业生产带来巨大的影响[4]。蝗虫群的尺寸巨大、内部各蝗虫的微动和整体运动比较复杂,具有丰富的雷达特征,通过雷达探测可望对虫害的监视和预测提供重要帮助。
(4) 复杂风场:复杂风场是自然界中因热力交换等原因造成的复杂流动现象,如龙卷风、风切变、下击暴流等,是灾难天气现象的典型代表[5]。比如,2015年在湖北监利县内一个强烈的下击暴流发生在长江上,路过此地的“东方之星”游船受此影响发生了倾覆,造成442人死亡。复杂风场具有尺度巨大和内部运动复杂等特点,发展先进的雷达探测与预警技术是避免此类灾难的重要举措。
总地来说,分布式软目标的内涵和外延非常丰富,其雷达特性与感知技术在诸多领域具有迫切的应用需求。但是该问题涉及的众多学科领域,如流体力学(动力学特性)、电子科学与技术(散射特性)、信息与通信工程(雷达探测技术)、光学工程(激光雷达)等,研究难度较大。所幸的是,在过去几十年间,人们已在若干相关领域取得了重要的研究成果,为这类目标的研究工作推进提供了很好的技术积累。本文在现有理论和技术的基础上,结合自己的研究心得,力图从这类目标的动力学、散射、探测、反演等方面,对分布式软目标的特性与感知技术研究进行一个梳理,为本领域的研究工作者提供有益参考。
2 研究现状
2.1 技术途径
我们在分析分布式软目标时会有两种目的,一是根据目标本身的特征如何快速获取其在雷达域的特征?二是从雷达域的特征能否反推出目标本身的特征?这也就是通常所说的正问题和逆问题,如图1所示。具体而言,正问题是从目标初始的组分、速度、物理形态等物理参数Q(x,t)出发,利用动力学变换F得到物理参数的空间分布及其演变,然后利用已有模型得到介电常数等电参数分布F(Q(x,t)),继而结合雷达参数对目标的电参数时空分布作散射变换H,得到目标的雷达特性H(F(Q(x,t))),如雷达散射截面 (Radar Cross Section,RCS)、功率谱和高分辨像等。这个过程的关键是对动力学和散射变换的理解、分析以及其在时/频域的高效精确计算。逆问题是从探测得到的雷达信号S(x,t)出发,结合雷达参数对其作逆散射变换H−1,反演得到目标的电参数分布H−1(S(x,t)),进一步作运动学的逆变换,反演出物理参数分布。一般而言,逆问题的求解需要大量的观测信息(如不同方位、频率等),但很多情况下难以获取足够多的观测信息,导致反演过程出现病态情况,因此逆问题的关键是病态问题的正则化和最优逼近的分析。
对于图1所示的分布式软目标雷达探测与参数反演处理流程,在应用时需要根据实际情况明确相关变换(动力学变换F与逆变换F−1、散射变换H与逆变换H−1)的内涵和特点。从物理形态来看,这类目标通常可以分为连续型和离散型,上述变换和分析方法会有较大的不同。比如晴空条件下的风场、飞机尾流属于连续型目标,内部无明显的离散成分;箔条云团、雨雾条件下的飞机尾流和风场等属于离散型目标,内部的离散散射体按一定的规律组合在一起。不过,目标的形态也与使用的传感类型密切相关,可能从一种类型转变成另一种类型。比如晴空条件下使用微波雷达探测大气风场,散射主要由介电常数的不均匀性所致,属于连续型目标;但如果使用激光雷达进行探测,散射更强的则是空气中被风场卷起的浮尘,使得目标具备更多的离散特征。下面分别就连续型和离散型两种情况,对分布式软目标的雷达特性与感知技术进行介绍。
2.2 连续型分布式软目标的雷达探测与反演技术
连续型分布式软目标的研究可以归结为超大电尺寸介质目标的运动、散射、成像与反演等问题。
(1) 连续型分布式软目标动力学特性。连续型分布式软目标的动力学特性可以用流体力学基本方程组进行描述,这是流体力学领域最重要的方程组,包括质量守恒方程、动量守恒方程、能量守恒方程、组分守恒方程以及气体状态方程[6,7]。层流和湍流是流体运动的两种状态,其中后者是流体运动中雷诺数较大时存在的自然现象,也是流体力学中最具挑战的问题之一,一直吸引着流体力学工作者探索研究。流体力学基本方程组对层流和湍流都是适用的,但对湍流而言,仿真分析的难度要大很多。针对不同的研究需求,流体力学方程组的数值分析方式按精度从高到低包括直接数值模拟(Direct Numerical Simulation,DNS)、大涡模拟(Large Eddy Simulation,LES)和平均雷诺数(Reynolds-Averaged Navier-Stokes,RANS),也已发展了时域有限差分法、有限元法、有限体积法、谱方法和边界元法等一系列先进方法来对其进行处理,并有Ansys Fluent等专业软件来对流体运动现象进行仿真。基于这些理论和数值方法,我们可以对连续型分布式软目标的物理参数(典型的如密度、速度、压强、温度、组分等)的时空分布进行建模与仿真计算,为电磁散射与雷达探测技术研究提供基础支撑。
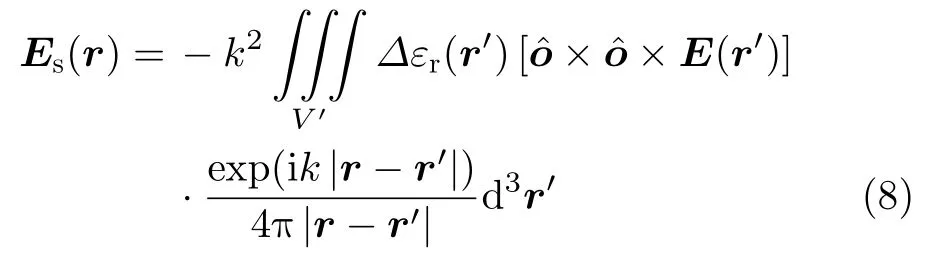
(2) 连续型分布式软目标雷达特性。雷达特性的研究首先要充分理解其散射特性。对于连续型分布式软目标,这可以归结为电大尺寸介质目标散射分析的问题,可以用体散射积分方程来描述[8]

其中,r′为散射体内某点的矢径,r为接收天线所在位置的矢径,V ′为该散射体所在体积,∆εr为散射体与背景的介电常数差异,·G(r,r′)为并矢Green函数,Ei为入射电场,E为总电场,k0为该电磁波在自由空间中的波数。因为未知量E既存在于积分内,又存在于积分外,且Green函数是振荡的,所以这是一个第2类Fredholm振荡积分方程。振荡性是电磁波激励介质后的“等效感应电流”与电磁波本身振荡性相耦合的产物,是电磁波传播和散射过程中自然的物理现象。在经典数值方法中,为了对振荡性进行刻画,一个波长里需要至少8~10个网格结点,这对于电大尺寸目标将导致巨大的网格数量,使得其对应的振荡积分方程求解非常困难。为了克服这些困难,学术界针对弱散射介质目标等一些特殊目标,提出了一些近似求解方法,典型的包括Born和Rytov近似。比如Born近似,其是将散射积分方程按算子形式展开成Neumann级数后取前2项[9]

其中,H是式(1)右侧的积分算子,是一个高振荡积分算子。Born近似相当于在计算量和计算精度之间选择一个合适的折衷,将散射积分方程求解的问题转化为振荡积分H(Ei)的快速精确计算的问题,困难减小。但是使用Born近似时需要仔细地考察其适用性,要求目标内部式(2)中的第2项比第1项显著小,即‖HE‖≪‖E‖,相关判据参见文献[8,10–12]。另一种颇具潜力的求解方法是渐近相位提取方法与振荡积分方程的结合,其本质是将总电场E表示为入射电场(振荡性的Ei)与一个慢变函数ηslow乘积的形式:E=Eiηslow[13],然后将原散射积分方程变成一个关于慢变函数ηslow的振荡积分方程求解的问题。当前,基于稀疏网格的振荡积分快速计算方法已有相当的积累,为该类方程的快速求解注入了新的思想与活力[14]。
在获得目标的电磁散射特性后,结合雷达参数进行相应的时/空/频率域变换,可以得到目标的雷达特性,如Doppler特性、极化特性、一维/二维高分辨像等,这些是雷达系统设计与探测方案设计的基础。对于给定分布式软目标,一方面可以结合上述雷达特性与雷达方程来评估给定雷达系统对目标的探测能力,另一方面可以为设计更适于这类目标探测的方法、技术乃至雷达系统提供理论支撑。在论及探测方法时,需要对雷达的参数进行优化甄选,涉及载频、波形、带宽等参数。载频方面,为实现目标的最佳探测,往往希望选用雷达的波段位于RCS较大的频段,这对于不同软目标是不一样,要根据其雷达特性进行针对性地分析;波形方面,在不考虑电子对抗的前提下,往往趋向于选择经典的波形,如脉冲的线性调频或相位编码波形,相关处理方法已比较成熟;带宽方面,需要根据实际的应用需求进行选择,当需要获得分布式软目标精细结构时,建议使用较大的带宽,否则可以使用较小带宽的信号以减轻雷达系统处理的压力。
(3) 连续型分布式软目标参数反演。参数反演的过程属逆问题,它是基于探测得到的雷达回波来反演目标的电参数,乃至动力学参数。在反演连续型分布式软目标的电参数时,是对散射积分方程进行逆变换。但由于积分里也包括电场,所以式(1)所示的散射积分方程是非线性的,求解非常困难。一种行之有效的求解方法是在某些条件下将该方程进行线性化,最有代表性处理方式是使用迭代Born近似或者迭代Rytov近似方法[8]。比如使用迭代Born近似时,首先基于Born近似将散射积分方程线性化,然后结合散射测量结果,用正则化方法对方程求解得到介电常数的初始估计;进一步地,将正散射方法应用于估计的介电常数上得到散射场估计值,其结合正则化方法又可获得新的介电常数估计;如此重复,直到介电常数和散射场的估计值残差达到设定的阈值。这个过程可能需要的迭代次数比较多,所以Chew等人[15]提出采用变形Born迭代方法来加速收敛过程,其本质是在每次迭代时将其中的Green函数都用新估计得到的介电常数进行更新,可以将最终介电常数的估计误差由1阶小量降为2阶小量。Rytov近似是基于相位变化得到的,一般认为Rytov近似在高频段和介电常数起伏较大处的适用性比Born好,否则Born近似的适用性更好。需要注意的是,逆问题往往需要来自不同方位的大量观测以减小求解过程中的病态性,因此在逆问题的实施中应尽可能地增加观测值。
2.3 离散型分布式软目标的雷达探测与反演技术
离散型分布式软目标是由大量离散的微散射体按一定规律组合在一起的,这些微散射体可能具有不同的形态、材质等特征,如雨雾降水粒子和箔条的形态与材料就有很大的区别。为描述方便,这些微散射体在本文中统称为粒子。从动力学特性、雷达特性、探测技术与参数反演几个方向对这类目标的研究现状进行阐述。
(1) 离散型分布式软目标动力学特性。如果粒子是球形的,可以利用粒子运动方程来描述其动力学特性,即[16]
其中,Dν为粒子尺寸,X是粒子位置,V是粒子速度,g是重力速度,ρa和ρw分别为空气和水的密度,Cd为该尺寸Dν粒子的阻力系数,U是尾流场的速度场,X0为粒子初始分布,VT为粒子的下落末速度,Vb为背景风场速度。对于分布式目标,内含的粒子数量往往特别巨大,经典数值方法求解微分方程式(3)时的计算量巨大。但是,若假设粒子之间不碰撞和并合,可以用数密度的方法来对粒子的分布进行描述,从而极大程度地减少计算量。具体过程为:(a)将目标所在区域按一定的网格划分,初始时各网格内针对每个尺寸的粒子均有一个数密度,用位于网格中心的该数密度来代替该网格内的所有该尺寸的粒子;(b)对于某给定粒子尺寸,以网格为基本单元,利用Runge-Kutta方法对运动学方程式(3)进行求解;(c)对于每一个网格,将运动到该网格内的该尺寸粒子的数密度统计求和,即得到该网格内该尺寸粒子总的数密度,其与粒子浓度具有类似的意义。
如果粒子是非球形的,则需要发展更为专用的动力学分析方法。比如箔条云团中的单个箔条,其与空气相互作用的力可以分解到轴向和法向,同时可能包括复杂的旋转运动,具体可以参见[17]。
(2) 离散型分布式软目标雷达特性。基于粒子的动力学和空间分布特性,可以对其电磁散射与传播问题进行研究。首先对于极化电磁波作到目标时的散射问题可以用如下的方程进行描述[18]
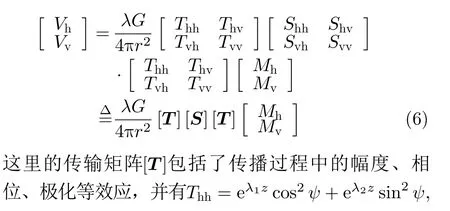
这实际上就是自由空间中传播时的雷达方程。在式(4)或式(5)所示的关系式中,关键是极化散射矩阵([S])或雷达散射截面(σ)的确定,这是与粒子的形状、尺寸密切相关的,也需要根据这些参数选择不同的散射计算方法。
若粒子是球形介质,其水平和垂直极化的响应是一样的,雷达散射截面可以根据不同电尺寸(粒子直径与波长之比)分别选择Rayleigh散射、Mie散射或几何光学散射进行计算,具体方式为[19]:(a)如果电尺寸a=kD ≪1(其中k为电磁波波数,D为散射体直径,适用上限一般可取a<0.1),可以使用Rayleigh散射:,其中λ为电磁波波长,εr为介质球的介电常数,对于液态的雨雾粒子一般取|K|2=0.93;(b)如果a>0.1,应使用Mie散射:,其中an和bn为不同阶Bessel函数的表达式,但在实际计算中往往是使用迭代法来避免数值溢出等不稳定的数值现象;(c)当电尺寸a远大于1时,使用几何光学散射,散射截面变得与波长无明显关系。
如果粒子形状是非球形的,其水平极化和垂直极化的响应不一样,散射分析的难度比球形的要复杂很多。所幸对于椭球形等一些特殊形状的粒子,现在已有较成熟计算技术,如扩展Mie散射方法[20]、传输矩阵(Transmission Matrix,T-Matrix)方法[21]、离散偶极子近似(Discrete Dipole Approximation,DDA)[22]等。雨滴在下降过程中受到空气的挤压作用,形成倒置碗状的形状,近似为椭球形;对于雪、冰晶等其他降水粒子,在实际分析的时候也常常以椭球形来近似分析[18]。对于箔条这种细长型的金属丝,Einarsson等人[23]给出了一种较为通用的散射特性计算方法;但如果金属丝的长度与雷达波的半波长相当,有更为简单的公式[24]。对于鸟、昆虫等其他离散目标,通常的分析方法是将其近似成一些简化模型的组合,然后基于FEKO等电磁仿真软件,通过大量计算建立这类目标的散射特性数据库。
如果电磁波在到达分布式软目标的过程中还需要穿越随机粒子介质,则需要考虑路径上这些粒子的电磁波传输特性,其本质上是这些粒子的前向散射特性进行分析。如果传输路径上粒子是比较均匀时,可以采用雷达气象学中应用较多的Oguchi方法进行分析[18]。该方法使用相干传播微分方程对极化电磁波的传输特性进行描述,其中的传输矩阵表示为粒子群前向散射矩阵的函数形式
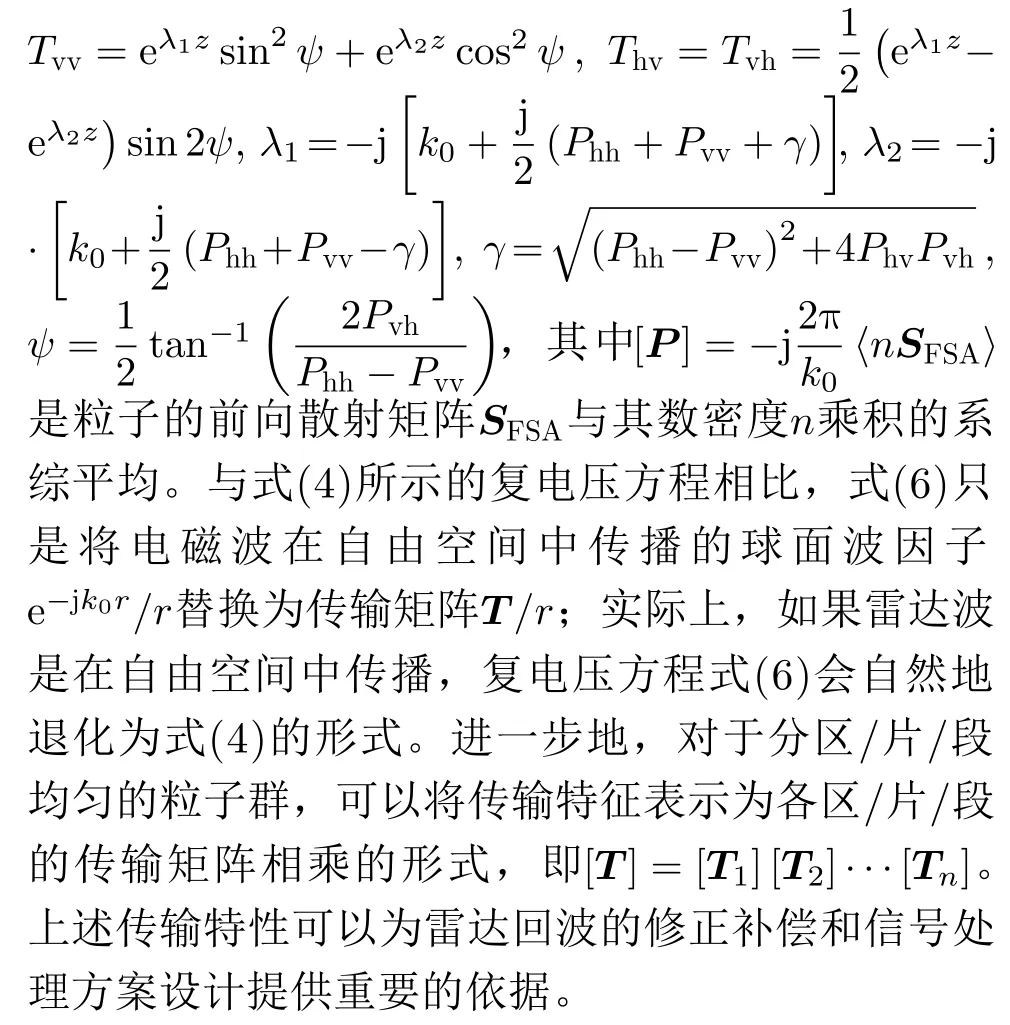
对于粒子群来说,粒子尺度谱(即单位体积内尺寸为Dν的粒子数密度N(Dν))是分析总体散射分析的另一个重要因素。当前,对于雨、雾、雪、霾等情况,均已存在一些较为成熟的粒子尺度谱,典型的包括Marshall-Palmer雨滴谱,Khrgian-Mazin雾滴谱、Heymsfield冰晶谱、Gunn-Marshall雨花谱、Deirmendjian霾滴谱、Junge气溶胶谱等[25]。当各个粒子的散射确定后,可以根据粒子的分布来求总的散射。如果粒子是稀疏分布的,可以将各个粒子的单次散射回波直接相干叠加可得到总的散射回波;如果粒子之间的比较稠密(粒子之间的间隔小于2倍波长),则一般应考虑粒子散射之间耦合的问题,可以采用Foldy-Twersky方法进行描述,不过计算量往往比较大[19]。假设粒子之间是稀疏的,一个观测体积内各个不同尺寸粒子的散射可以表示为
其中,[S(Dν)]为尺寸Dν的粒子对应的散射矩阵。进一步地,多个小体积总回波可以由式(7)求和得到。这里得到的回波基于极化电磁波激励的,由其可以得到目标一系列非常重要的极化特征,如雷达差分反射率Zdr(即水平极化与垂直极化的反射率之比)、线性退极化比Ldr、相关系数ρhv、差分相位Φdp(比差分相位Kdp)等[26]。这些因子从幅度、相位等角度对目标的极化特征进行描述,已在天气现象解释与预报领域得到成功应用。
另外,雷达回波的仿真中还需要结合分布式软目标所处环境特性,对其噪声/杂波进行建模,这是一个很专门的学问[1,27]。当得到雷达回波信号后,对其进行时频分析,可以得到一系列雷达特性,如对脉冲间的回波使用脉冲对处理方法(Pulse Pair Processing,PPP)或快速Fourier变换(Fast Fourier Transform,FFT)得到Doppler谱[5],对不同频率的回波作FFT得到一维距离高分辨像,使用转台成像模型得到ISAR像[28]等,这是后面进行数据处理的基础。
另一种对粒子运动探测常用的传感器是激光雷达,比如晴空条件复杂风场等流动现象的探测。在晴空条件下,空气中往往包含一定的浮尘/气溶胶等,此时激光雷达的探测包括两种散射机,即Rayleigh散射机理和Mie散射机理,前者主要由空气分子散射所致,后者主要由浮尘或气溶胶等散射所致[29]。这两种散射的特点迥异:由于空气分子不规则运动的速度非常快,但是散射很弱,因此其Doppler谱的特点是低且宽;浮尘的运动主要由背景风场带动,速度方差较小,且其散射比分子散射要显著强,因此在Doppler谱上的表现为高且尖,如图2所示。对于测风使用比较多的1550 nm波长的激光雷达,Doppler谱中估计得到速度对应着浮尘或气溶胶的运动。激光雷达的体制又分为直接探测和相干探测两类,前者是对收到的回波进行直接鉴频后获取Doppler频移及速度,后者是将回波信号和原始激光信号进行外差来获得目标的Doppler频移。由于相干探测方法易于采用全光纤结构实现,同时具有稳定性较好等优点,是低空大气探测时常用的激光雷达体制。
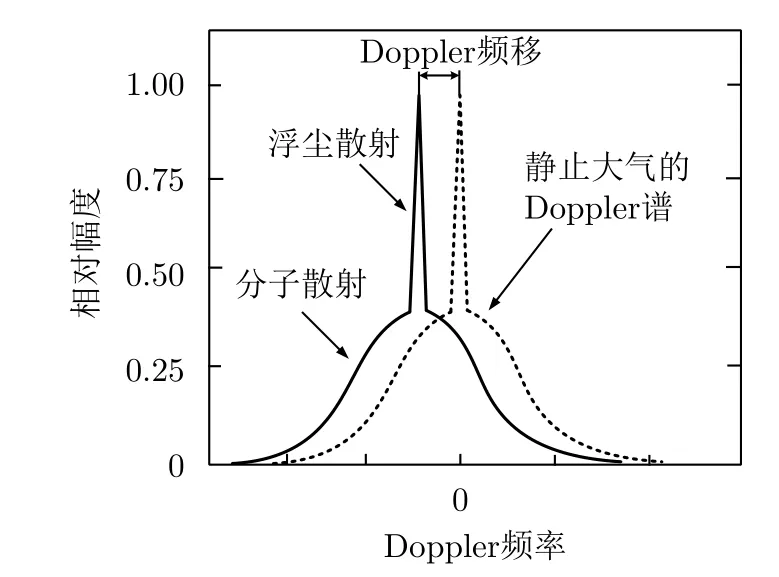
图2 激光雷达Doppler散射机理Fig.2 Scattering mechanism of Doppler Lidar
激光雷达的波束很窄,所以其角分辨率高,杂波影响很小,这是其有利粒子群探测的一个原因。但是由于波长的差异,激光雷达和微波雷达回波信号的相干性差异较大,使得两者在获取Doppler谱时的数据处理方法不一样。微波雷达的相干时间较长,所以可以通过相邻脉冲之间的采集信号(慢时间)进行相关处理获得Doppler谱,但是激光雷达较短的相干时间使得其只能采用相邻采样(快时间)来进行相关处理,即:取N个相邻的采样,将其补零到一定的长度(比如1024)后作快速Fourier变换得到Doppler谱,相邻脉冲之间的Doppler谱进行积累以提高信噪比[30]。需要注意的是,激光雷达的这个处理过程实际上是对相邻的N个采样对应距离上各粒子速度取平均。此距离可能达几十米乃至更长,使得其径向上的空间分辨率与角度上的比,要粗糙很多。对于速度在空间上变化较大的情况,这种体制得到的Doppler速度谱难以精细地反应目标真实的速度分布,因此仍需要在激光雷达的体制上进行创新。
(3) 离散型分布式软目标参数反演。对于粒子群的特征反演来说,由于决定粒子群散射的因素非常多,很难找到一个逆算子来直接由散射回波反演得到粒子本身的特征,因此粒子群特征反演大致可以划分为两个层面,一是对粒子群本身属性的反演,二是对粒子群背景运动的反演。
对于球形小粒子所组成的粒子群,激光雷达是有竞争力的参数反演方式,一种典型的方案是根据粒子对光谱中不同频段的反应所形成的吸收峰差异来对物质的构成进行反演,在生化物和污染物探测等方面已开展了众多应用[31]。在微波雷达领域,在配合一定先验知识的情况下,人们已经能够利用极化特征来对粒子群进行分类。一个典型的工作是在雷达气象学领域,通过综合雷达回波的Zdr,ρhv,Φdp等回波特征,对降水物(雨、雾、雪、冰晶等)进行区分,以及对粒子的尺度谱进行辨识,在定量降水估计等方面得到了重要应用[18,26]。
进一步地,基于粒子群的Doppler谱等雷达特征来对其所处的背景流场信息进行反演是风力发电、航空气象等领域非常关注的问题。要回答这个问题,首先需要明确雷达探测到的粒子速度与背景流场的速度是否一致?这是与粒子的惯性度密切相关的。惯性度描述的是粒子运动受背景流场的影响程度,可以用Stokes数来进行度量[7,32],定义为St=ts/tflow,其中ts和tflow分别为粒子的弛豫时间和流动的特征时间。如果粒子的Stokes数远小于1,粒子是弱惯性的,认为粒子的速度与背景速度一致;反之,认为两者速度不一致,需要基于粒子运动方程对探测数据进行匹配优化,以实现关键参数的反演。通常情况下,密度和尺寸均较小的粒子具有较小的惯性度。
当前,人们主要研究的还是弱惯性粒子运动的反演。比如晴空条件下激光雷达测风时,感知的粒子是气溶胶和浮尘,其惯性度往往较小。雷达能够探测到的是Doppler速度,这是粒子群相对雷达运动的径向速度,但实际应用中可能非常关注其三维运动。如何仅使用单部雷达探测实现三维速度的反演?针对这个问题,人们发展了一些特定的扫描方式,如速度方位显示(Velocity Azimuth Display,VAD)、Doppler波束切换(Doppler Beam Swinging,DBS)、体积速度处理(Volume Velocity Processing,VVP)等,它们的主要原理是在假定背景流场为均匀或线性情况下,增加多个观测角度来实现三维速度的反演[33]。但是需要注意的是,背景流场为线性的假设在很多情况下是难以成立的,特别是在探测距离较远的情况下,上述扫描方式的感知区域是较大的(可达若干或几十千米量级),里面的流场运动难以满足线性的假设。为此,一些学者开展了基于单部雷达对非线性风场进行反演的探索研究,最具代表性的工作包括变分法,其基本原理是通过引入流体运动的方程,以变分的思想解析或数值地反演出背景流场的运动来[34–37]。
对于强惯性粒子(如雨滴),如果需要较精确地反演背景风场,则需要结合粒子运动方程进行。Doppler谱是动力学参数反演时最关键的雷达特征;由于粒子群里可能含有各种不同尺寸的粒子,那么Doppler谱里究竟哪个谱分量对应哪个尺度粒子的运动?这是难以回答的。但Doppler谱本身有强度分布,如果能甄选出强度最大谱分量所对应的粒子尺寸,我们仍能建立起Doppler谱与背景流动的关系,这个尺寸我们称为粒子群的特征散射尺寸。所幸的是,如果预先知道粒子群的尺度谱,那么可以根据极化特性获取其特征散射尺寸[38],将该尺寸粒子对应的粒子运动方程加入到变分法的辅助方程里,可以比传统方法更准确地反演得到三维的背景风场。这个工作国际学术界仍在积极研究之中。
3 应用实例
为了更直观理解上述分布式软目标雷达特性与感知技术,这里以飞机尾流为例对上述技术途径进行阐述。
飞机尾流是机翼上下表面压力差在其后方形成的一种反向旋转的强烈气流,是军民用航空安全、反隐身飞机、大气物理等领域非常关注的目标,其研究涉及流体力学、电子科学与技术、信息与通信工程、光学工程等学科,涉及的主要科学问题包括:复杂场景下飞机尾流的动力学及演化特性建模,不同天气条件下的散射机理建模,多传感器(微波雷达和激光雷达等)探测,精确鲁棒的多特征参数(环量、涡心轨迹等)反演等。上述问题相互交织,在技术上形成螺旋上升的态势。
美国和欧洲在飞机尾流方面的研究较早,其依托下一代空管计划(NextGen[39])、欧洲单一天空(SESAR[40])、航空系统模块升级(ASBU[41])等重大空管科技计划,在飞机尾流的动力学、散射以及探测方面取得了诸多成果,代表性的研究机构包括美国联邦航空局、交通运输部、法国Thales公司、德国宇航中心等。国内在飞机尾流方面的研究起步较晚,但近十几年来发展较为迅速,部分成果已达到国际先进水平,代表性的研究机构包括国防科技大学、中国民航大学、北京航空航天大学等。国防科技大学王雪松教授团队在飞机尾流的雷达特性与探测技术上开展了长期的研究,与核心成员李健兵教授等合作,提出了一套系统的飞机尾流散射特性计算解决方案,发现了飞机尾流若干重要的散射特性,有针对性地发展了复杂条件下飞机尾流的检测与识别方法,提出了多种特征参数反演方法,开发了一套飞机尾流探测与特征反演软件系统,并开展外场激光雷达和微波雷达的验证实验研究,部分成果已在军民用航空安全中得到成功应用[10–12,14,16,38,42–60]。这里结合团队近些年来的研究心得,对相关技术进行介绍。
在研究飞机尾流是需要区分不同的天气条件:干性条件和湿性条件下的尾流。在干性条件下,飞机尾流按产生的条件分成尾湍流、凝结尾迹和霾中尾流,其中尾湍流即是通常所说的翼尖尾涡,是晴空大气中产生的尾流,也是受关注最多的情况;凝结尾迹是指处于水汽易饱和状态下的空气受飞机尾流影响,内部水汽发生相态变化成为视觉上直接可见的冰晶和液滴等,这种现象在高纬度地区、秋冬季节的高空更易发生,直接表现为飞机飞过后的拉烟现象;霾是当前中国比较常见的一种现象,其与雾有很多类似之处,所不同的是霾是干性颗粒。在湿性条件下,则通常需区分雨、雾、雪等不同的天气情况,雷达观测到是受到尾流速度调制的这些粒子,其散射往往比较强。在上述晴空、湿性等不同的气象条件下,飞机尾流的动力学、散射与探测方法的差异较大,按微波雷达和激光雷达两种途径进行分析。
3.1 飞机尾流的微波雷达探测
对于晴空飞机尾流,如果使用微波雷达进行探测,视作一种连续型介质目标,对应着超电大尺寸介质目标的散射与探测的问题。将关系式E=Ei+Es代入体散射积分方程式(1)可以变换得到
(1) 介电常数∆εr分布的建模,这是与飞机尾流的动力学特性密切相关的。美国NASA的科学家Shariff等人[61]研究了尾流内部因为密度所致的介电常数分布,Virginia理工大学的Myers等人[62]研究了因水蒸气浓度所致的介电常数分布,国防科技大学李健兵等人[49]则对上述两项工作中的问题进行了改进,基于等熵流关系式将介电常数分布分解为密度变化与水蒸气浓度变化加权综合的介电常数模型,其中密度变化由简化的Euler方程得到,水蒸气浓度变化由对流扩散方程得到,这为飞机尾流散射机理的解释提供了很好的物理模型。
(2) 内部总电场E的获取,这涉及弱散射介质目标散射近似分析的问题。Born近似是分析飞机尾流这类弱散射介质目标的重要理论工具,但其误差分析是一个难题。国防科技大学李健兵等人[11,12,43]基于算子范数理论和谱域Green函数分解方法提出新的Born近似适用性判据,理论证明了Born近似对飞机尾流散射研究的适用频率上限可达X波段上端。
(3) 三维高振荡积分的快速精确计算,这是电磁学、光学、量子力学等领域中长期研究的基础性问题,在计算数学领域也受到诸多关注,典型的方法包括Filon方法[63]、Levin方法[64]、Iserles方法[65]等。国防科技大学李健兵等人[53]提出了一种基于分层求解思想和Chebyshev谱理论的高振荡积分计算方法,可以在稀疏网格情况下实现振荡积分的快速精确计算,突破了Levin方法易受病态性影响的瓶颈,较好解决了经典方法(如Gauss积分)计算量随电尺寸增加而呈几何级数增长的问题。
在解决上述3个关键问题的基础上,提出了一套系统的飞机尾流散射特性计算解决方案,实现了全尺寸飞机尾流在常规雷达频段内的散射特性计算,发现了飞机尾流一系列重要的散射特性,主要包括:(1)飞机尾流窄带特性信号的若干变化规律,如尾流RCS在时域上独特的阶跃现象等[44];(2)飞机尾流独特的宽带特征信号并揭示了其形成机理(强散射中心之间的距离与尾流涡间距在雷达视线上的投影相当,如图3所示)[50];(3)飞机尾流在不同频段的雷达散射主导机理(即低频段的密度主导机理,高频段的水蒸气主导机理)[49]。
对于其他条件下的飞机尾流,如雨、雾、霾中的尾流,被尾流卷起来的雨、雾等粒子的散射比尾流本身的更强,实际应用中是通过探测这些粒子来间接地实现尾流的探测与参数反演[16,54–56,66]。从动力学的角度来看,这些粒子受到尾流速度场的调制,这个过程可以用如式(3)所示的运动学微分方程来描述,结合数密度方法,利用Runge-Kutta求解微分方程,可以得到雨雾等粒子的数密度分布,如图4(a)所示。进一步地,结合雷达给定的扫描方式,利用复电压方程式(7)来获得每个时间点上飞机尾流的回波,由回波可以得到相应的散射强度分布、Doppler谱等雷达特征,如图4(b)所示。这些结果为其他条件下飞机尾流的散射机理解释和雷达探测性能分析提供了基础支撑。
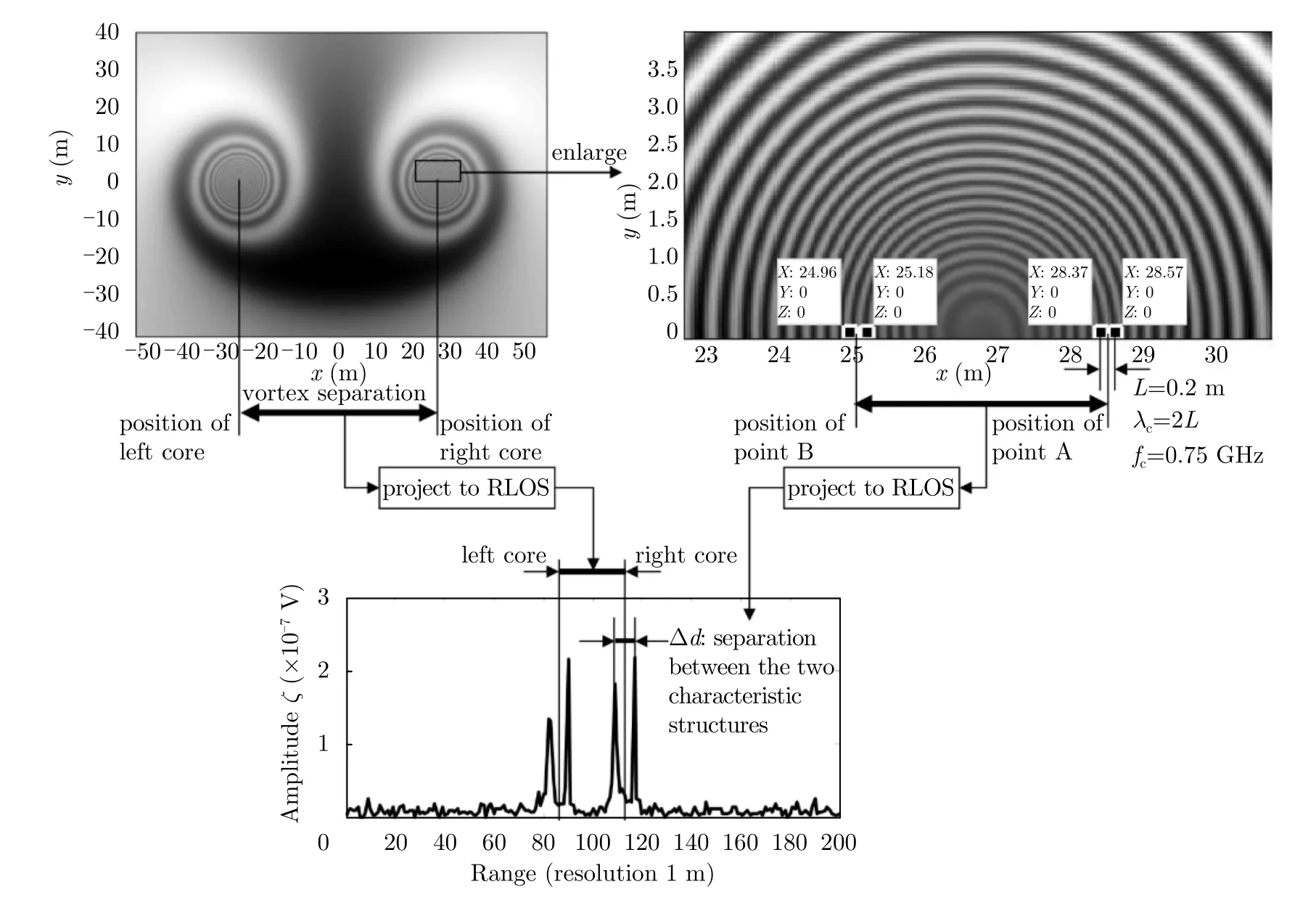
图3 飞机尾流一维高分辨距离像的机理解释[50]Fig.3 Hight Resolution Range Profile (HRRP) and its mechanism explanation of aircraft wake vortices[50]
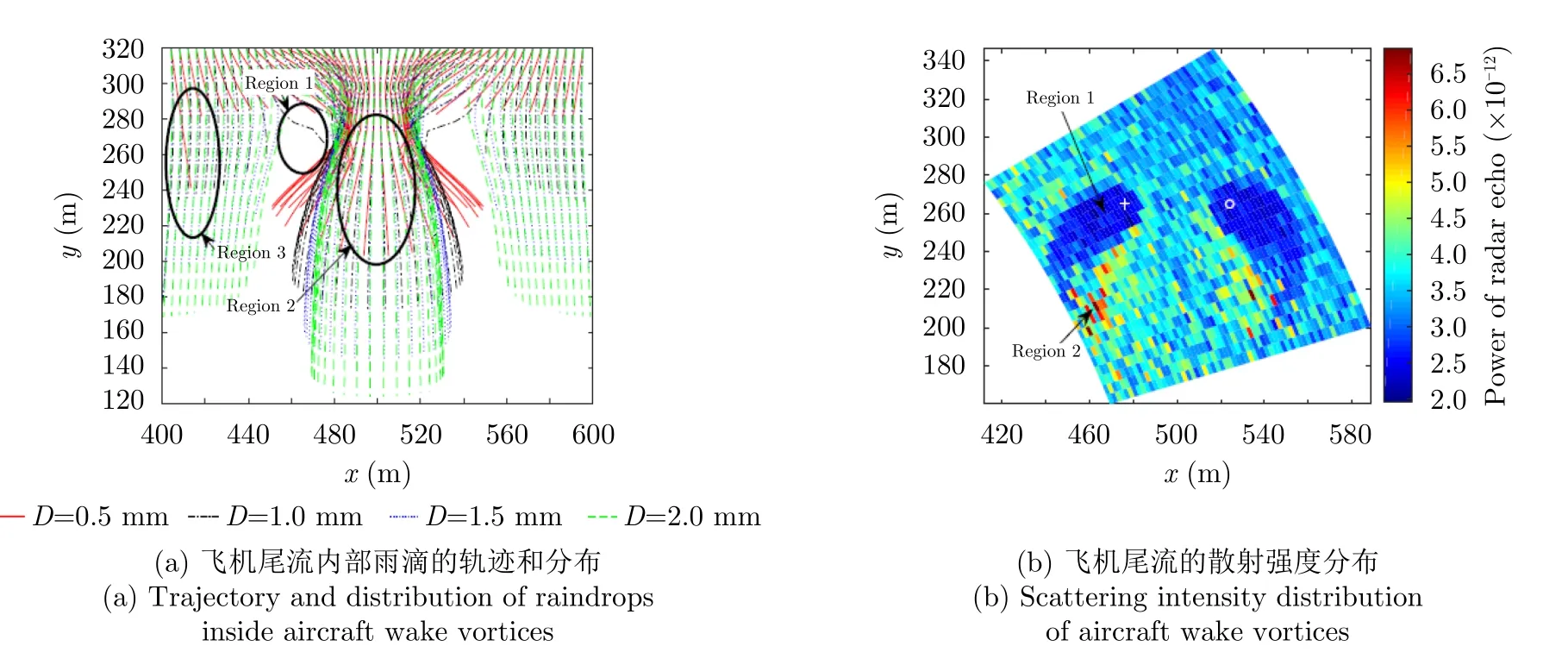
图4 降雨条件下飞机尾流内部雨滴的动力学特征及散射强度[16]Fig.4 Dynamics characteristics and scattering intensity of raindrops in aircraft wake vortices under rainy condition[16]
关于飞机尾流参数反演问题,需要考虑粒子的惯性。对于雨滴来说,其弛豫时间为ts=2ρwr2/9µ,其中ρw,r和µ分别是水密度,雨滴半径和动粘性系数,对于1 mm半径的雨滴有ts~12.5 s;对于尾流来说,其特征时间为tflow=2πrmax/Vmax~O(1),其中rmax和Vmax分别为尾流最大切向速度及其所在半径。因此由前面Stokes数的定义可知,雨滴的Stokes数是远大于1的,雷达探测到的速度(即雨滴径向速度)与背景速度(即尾流的速度)是不一致的,对尾流进行参数反演时需要考虑雨滴的惯性。但是,降雨情况下包括不同尺寸的雨滴,其对背景速度调制的敏感度以及散射贡献度有较大差异。根据雨滴的尺度谱可以得到雨滴特征散射尺寸,从Doppler谱中估计的Doppler速度(对应着幅度最大处)认为是该尺寸雨滴的径向速度。由于飞机尾流速度在轴向上的分量很小,因此一种比较常用的参数反演方式是从尾流一侧,在垂直尾流轴的面内进行上下扫描,即距离高度指示(Range Height Indicator,RHI)扫描,或位于尾流正下方进行向上观测。引入粒子的运动学方程,利用优化求解方法可以反演得到相的特征参数,如环量(Γ)和和涡心位置(OL和OR)[16,54]
其中,A,V,VT为探测到的粒子加速度、速度和下降末速度,是对环量Γ归一化后的速度模型。
对于雾中飞机尾流,由于雾滴尺寸非常小,所以其Stokes数很小,是一种弱惯性粒子,认为雾滴速度与尾流速度一致。这种情况下,尾流的参数反演实际上比雨中的更简单,具体可以参见文献[55,56]。
3.2 飞机尾流的激光雷达探测
由于在雨雾情况下激光衰减太强,因此飞机尾流的激光雷达探测主要局限于晴空条件下,空气中往往包含一定的浮尘,对于测风使用比较多的1550 nm波长的激光雷达,Doppler谱中估计得到速度对应着浮尘或气溶胶的运动。
由于浮尘尺寸比较小,由Stokes数可知其属于弱惯性粒子,则认为浮尘粒子的速度Vp与背景速度(尾流速度、背景风、湍流)一致,即

其中,VL和VR分别是尾流左涡和右涡的诱导速度,Vb为背景总体的风场,Vϵ为湍流速度场。引入尾流的速度模型,背景风场的估计,以及湍流的特性,可以利用速度匹配的方法来反演得到尾流的特征参数,如环量和涡心位置。国防科技大学李健兵等人基于这个基本假设出发,利用尾流的动力学等特征,提出了3种性能较为优良的参数反演方法,即路径积分方法[45]、最优化方法[46]和速度极差方法[47]。相关方法已在香港国际机场、俄罗斯科学院、青岛流亭机场、长沙黄花机场等大量的激光雷达探测数据上得到成功应用。
总体而言,经过若干年的研究,国内在飞机尾流的雷达(激光雷达和微波雷达)探测方面已有一定的积累,部分技术已达国际先进乃至领先水平,这为基于飞机尾流探测的反隐身技术、动态尾流间隔等技术的发展提供了有效的基础支撑。当前,中国民航正在开展飞机尾流重分类(RECATegorization China,RECAT-CN)的试运行,主要目的是缩减国际现有的飞机尾流间隔,以提升机场飞机起降容量。下一阶段,将基于雷达探测开展飞机尾流动态间隔技术的研究,这是未来飞机间隔技术发展的趋势,可望有力支撑民航空管在空域上的“增容提效”,推进绿色航空健康发展。
4 结束语
分布式软目标是雷达探测领域较为关注的一类特殊的目标,与飞机舰船等通常的硬目标相比,具有空间尺度大、内部运动或组分复杂可变等特点,典型的包括飞机尾流、高超声速飞行器尾迹、箔条云团、复杂风场等。这类目标按形态分为连续型和离散型两类,研究过程中包括动力学、电磁散射/传播、雷达特征、探测识别、参数反演等方面,属多学科交叉问题。这类目标研究的正问题(即由目标物理属性到雷达特性)包括动力学变换、散射/传输变换等方面,涉及的关键技术包括动力与散射变换的精确表达与高效计算等;反问题(即由雷达观测量反演目标的物理属性)包括散射与动力学的逆变换,涉及的关键技术包括这些变换的线性化、正则化与高效计算等。总体来看,在相关学科发展的支撑下,分布式软目标的特性与探测技术研究得到了长足进步,但仍面临不少挑战,至少包括以下3个方面:
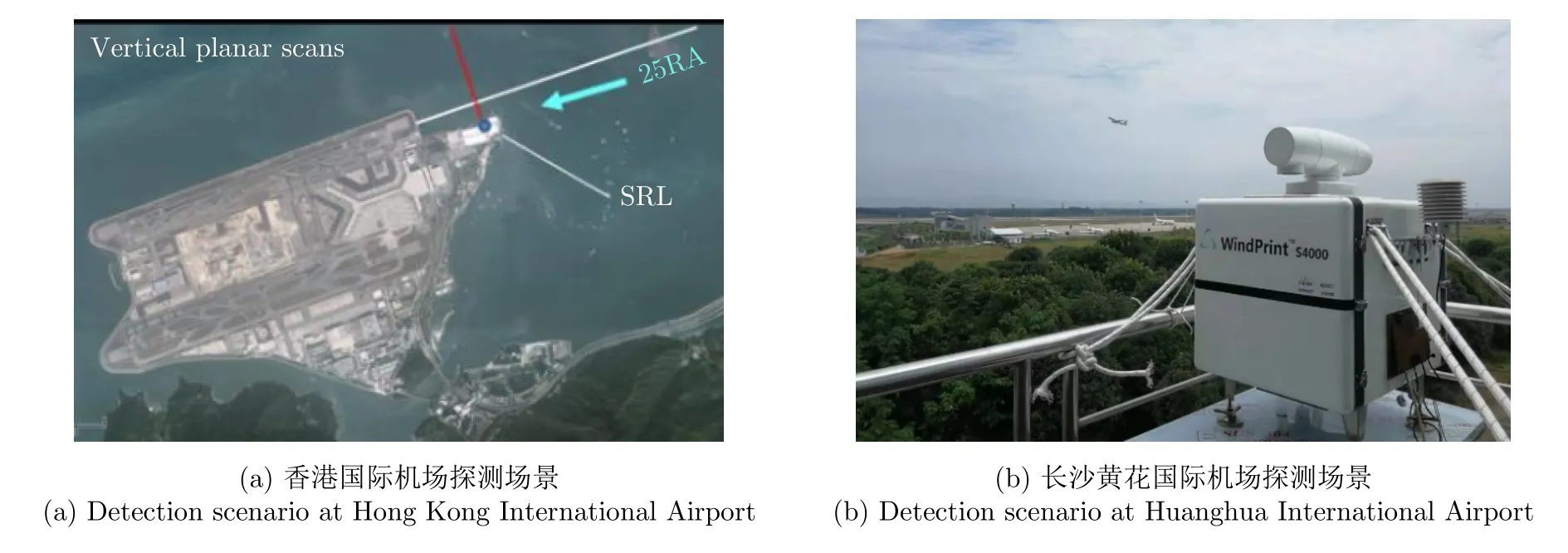
图5 飞机尾流激光雷达探测Fig.5 Lidar detection of aircraft wake vortices
(1) 复杂场景下的鲁棒探测:很多情况下,分布式软目标的散射较弱,给目标的探测带来很大的困难。虽然扩展目标的恒虚警(Constant False Alarm Rate,CFAR)检测、检测前跟踪(Track Before Detection,TBD)、Hough变换、凝视模式下的频谱积累等方法的应用能够为探测能力的提升提供帮助,但在复杂的天气、环境杂波等影响下的鲁棒性探测,仍是我们需要直面的问题。
(2) 专用传感器的设计:分布式软目标与传统的硬目标在特点上有较大的区别,所以需要根据这类目标的特点,有针对性发展更为适用的雷达体制和信号处理方法。比如,考虑到目标内部的时变性,可以采用多波束分频同时探测的雷达体制可望有效地消除传统探测方式所致的Doppler速度分布的畸变等。
(3) 多传感器联合探测:当前的研究主要集中一种传感器的探测,使得目标的特征难以充分发掘。为此,可以结合多种传感器(如激光雷达、微波雷达、高速摄像)的特点,通过信息融合的方式,充分利用各传感器的优势,以利目标的探测。比如,激光雷达通过对空气中的浮尘探测来实现复杂风场的感知,微波雷达通过对降水粒子或介电常数不均匀来实现风场感知,两者的联合探测一方面可以覆盖全天候条件下探测,另一方面其不同的探测机理、时空分辨率等也为目标特征获取提供了更多信息量。
我们认为,当前分布式软目标的特性与感知技术已得到较好的研究。随着相关支撑学科的发展,以及对分布式软目标探测理论和传感器的进一步探索研究,可望形成一套较为完整的分布式软目标特性与感知技术体系,为防空反导、气象观测、航空安全等军民应用提供重要的理论支撑。
猜你喜欢
兵器装备工程学报(2022年10期)2022-11-01
中等数学(2022年5期)2022-08-29
农业工程学报(2022年4期)2022-04-24
汽车观察(2021年8期)2021-09-01
舰船电子工程(2021年6期)2021-06-28
科学与财富(2021年33期)2021-05-10
科技研究·理论版(2021年20期)2021-04-20
计算机与网络(2020年19期)2020-12-04
风能(2020年7期)2020-04-19
学校教育研究(2018年8期)2018-07-09
