极化SAR图像舰船目标检测研究综述
2021-03-04 13:45:30杨子渊蒋燕妮
雷达学报 2021年1期
刘 涛 杨子渊 蒋燕妮 高 贵
①(海军工程大学电子工程学院 武汉 430033)
②(西南交通大学地球科学与环境工程学院 成都 611756)
1 引言
合成孔径雷达(Synthetic Aperture Radar,SAR)是一种主动式微波遥感设备,它使用虚拟阵列及脉冲压缩等技术获取高分辨力地物二维图像。极化信息是电磁波的重要属性,目标的变极化特性也是目标自身固有的重要属性之一,可用于目标检测和识别等领域。将极化信息应用到SAR系统,就构成了极化SAR (Polarimetric SAR,PolSAR)系统,它保留了更完整的目标电磁散射特性,成为现代雷达成像技术的重要工具,目前已广泛应用在军事侦察、地形测绘、环境与自然灾害监视、海面舰船目标检测等领域[1]。在过去的30年中,不少学者在极化雷达遥感方面做了大量的工作,为极化雷达遥感应用奠定了坚实基础,并取得了丰硕的成果。值得指出的是,Boerner及其国际合作者等对此做出了卓越贡献,他们不仅是极化雷达理论及其应用的积极推动者,也是极化雷达理论的积极传播者。第1部实用正交极化SAR系统,是1985年美国国家航空航天局喷气动力实验室(NASA JPL)[2]基于分时极化测量技术研制的Airborne SAR (AIRSAR),数据的成功获取刺激了人们对PolSAR数据的分析和应用,从此PolSAR系统进入了高速发展时期。目前为止,国内外典型PolSAR系统主要有[3]:(1)机载SAR方面:美国AIRSAR系统,澳大利亚AuSAR系统,丹麦EMISAR系统,新西兰PHARUS系统,日本PISAR系统,加拿大CV-580系统,德国DOSAR,MEMPHIS,ESAR系统,法国STORM系统等;(2)星载SAR方面:日本ALOS/PALSAR系统,德国TerraSAR-X系统,加拿大RADARSAT-1/2系统等。2016年8月10日,我国首颗民用C波段PolSAR卫星高分三号在太原卫星发射中心成功发射,达到国际先进水平,目前已广泛应用于海洋、减灾、水利及气象等多个领域。
随着PolSAR系统的迅速发展,PolSAR图像解译技术得到了越来越广泛的关注。基于PolSAR图像的目标检测方法成为SAR信息处理领域的前沿课题。国内外许多研究机构在PolSAR目标检测领域做出了卓有成效的工作。美国林肯实验室、加拿大遥感中心、日本新潟大学、德国宇航中心(DLR)、澳大利亚国防科技组织(DSTO)、英国斯特林大学、挪威特隆姆瑟大学以及国内中国科学院、清华大学、国防科技大学、电子科技大学、西安电子科技大学、海军工程大学等研究单位都做出了突出贡献[3]。以NASA JPL、林肯实验室为代表的研究机构开展了PolSAR成像、目标检测分类与识别等诸多引领性的工作,获得大量实验与理论成果。研究结果表明,极化信息将进一步改善雷达目标检测与分类识别性能[4]。林肯实验室的Novak在目标极化检测领域做出了奠基性的贡献。PolSAR图像舰船目标检测最常用的方法是恒虚警(Constant False Alarm Rate,CFAR)检测,这是因为舰船目标相对于海杂波而言有较强的散射回波,在目标先验信息未知的情况下,采取CFAR检测的方法即可取得较好的检测效果。然而随着雷达平台参数多样性、海况环境复杂性的影响,复杂海杂波统计建模与参数估计、慢小目标检测、密集目标检测等仍然是当前PolSAR图像舰船目标检测的难点问题。
本文通过梳理当前热门的PolSAR舰船目标检测算法,给出PolSAR舰船目标检测的发展历史和未来趋势,为后续开展的研究工作给出建议,综述框架如图1所示。当前PolSAR舰船目标检测方法主要可分为4大类,即极化特征目标检测方法、慢速运动目标检测方法、舰船目标尾迹检测方法和基于深度学习的目标检测方法。目标极化特征检测方法主要适用于舰船目标本体极化特征和杂波特征有一定差异情形下的检测;慢速运动目标检测方法主要适用于目标杂波极化特征差异较小但有一定速度差异的情形,同时也能提取目标运动信息以获取实时海面态势;舰船目标尾迹检测方法不是检测舰船目标本体,而是检测运动产生的尾迹,主要针对小目标和隐身目标。数据驱动的深度学习方法是人工智能的重要工具,不需要人工提取目标特征,在PolSAR图像智能解译中取得了巨大成功。CFAR检测本质上属于统计信号处理,可以看作上述方法的后续,二者存在串联关系,刘涛等人[5]对此做了大量研究工作,在此仅作代表性介绍。
2 极化特征目标检测方法
PolSAR图像目标检测的常用方法是基于SAR图像像素点统计特性的检测算法[6]。为了充分利用像素的统计相似性和空间相关性,出现了像素块的检测方法[7]。目前PolSAR舰船目标特征检测方法大致分为像素级和像素块两类[7]。像素级检测算法主要包含简单极化通道合成检测技术、基于极化最优化的检测技术和基于散射机理的检测技术[8]。像素块检测算法又称为空间邻域算法,主要包含超像素检测算法和邻域矩阵检测算法。
2.1 简单极化通道合成检测技术
当极化通道数量增加时,简单极化通道合成检测技术应运而生[9]。简单通道合成有两种思路,第1种是首先对每一个极化通道进行单独检测处理,最后对检测结果进行融合处理,属于决策级融合,如单通道检测器(Single Channel Detector,SCD)[9];第2种是以像素为基本单位,首先合成不同极化通道数据,对合成后的图像以单通道方式进行CFAR检测,属于信号级融合,可以看作对散射矢量进行线性加权所获得的检测量[10],如最佳能量检测器(Optimal Span Detector,OSD)、能量检测器(Span Detector,SD)[10]。大量实验结果表明,简单极化通道合成效果比单极化SAR图像的检测效果有明显改善[10]。此类方法较为简单,目前除了简单场景和性能要求不高的情形大都不再使用。

图1 PolSAR舰船目标检测方法分类Fig.1 Classification of PolSAR ship detection methods
2.2 基于极化最优化的检测技术
极化最优化是指按照一定的优化目标函数,综合利用不同极化通道的信息,对PolSAR图像进行目标特征提取的信息处理技术,是简单极化通道合成的升级。1988年Boerner等人[11]基于最大信噪比准则提出了极化匹配滤波器(Polarimetric Matched Filter,PMF)。PMF是一种最佳线性滤波器,其对极化散射矢量进行加权,达到抑制杂波、提高信杂比的效果[11]。1989年,Novak等人[12]基于似然比检验的原理,提出了最优极化检测器(Optimal Polarimetric Detector,OPD),该方法达到了极化探测器的理论上限(需要目标的先验信息)。对OPD稍加变形,采用单位矩阵与极化通道功率的乘积代替OPD中的目标协方差矩阵,即可得到单位似然比(Identity Likelihood Ratio Test,ILRT)检测器[13]。1990年,为了弥补OPD需要先验信息的缺陷,Novak和Burl[14]以杂波起伏度为优化目标,提出了极化白化滤波器(Polarimetric Whitening Filter,PWF),它的检测性能已被证明与OPD几乎相同[14]。杨健等人[15]以最大信噪比为准则,通过优化收发极化方式,提出了极化对比增强方法(Optimization of Polarimetric Contrast Enhancement,OPCE),取得了与匹配滤器波接近的检测效果。杨栋文等人[16]提出基于最小杂信比子空间(Minimal Clutter Signal Ratio,MCSR)的方法进行极化对比增强,得到PMF是其特例的结论。MCSR方法在特定环境下具有较好的目标检测效果,但是难以得到子空间的最优检测维数。Novak[17]指出检测性能并不仅取决于信噪比,同时取决于杂波起伏度。极化最优化检测技术的具体性能对比如图2所示,实验结果表明OPD检测算法性能一般最佳,基于极化对比增强的检测算法效果一般不如基于极化白化滤波的检测方法[18]。
为了将Novak等人的工作扩展到多视极化SAR图像,Lopes和刘国庆等人[19,20]将PWF扩展为多视极化白化滤波器(Multilook PWF,MPWF)。针对PWF统计建模与参数估计问题,刘涛等人[21]对基于PWF的PolSAR舰船目标检测CFAR特性进行了深入研究,针对不同情况的海杂波,推导出了整个对数累积量平面上不同统计分布模型的CFAR检测解析表达式,并以实测及仿真数据证明了推导的正确性,取得了良好的CFAR效果,一定程度上解决了雷达平台参数多样性、海况环境复杂性影响下CFAR检测统计建模和参数估计困难的问题。图3展示了杂波背景为逆贝塔(IBeta)分布乘积模型下基于PWF的CFAR检测结果。可以明显看出当统计模型与实测数据吻合时,CFAR性能最好,其他统计模型(K-Wishart,G0-Wisahrt,Wishart以及对数正态模型)均出现了较多的虚警。高贵、冷祥光等人[22–26]也做了单极化SAR图像统计建模与参数估计方面的研究,对上述工作有宝贵的启发作用。

图2 常用极化优化检测方法的性能对比[18]Fig.2 Performance comparison of common polarimetric optimization detection methods[18]
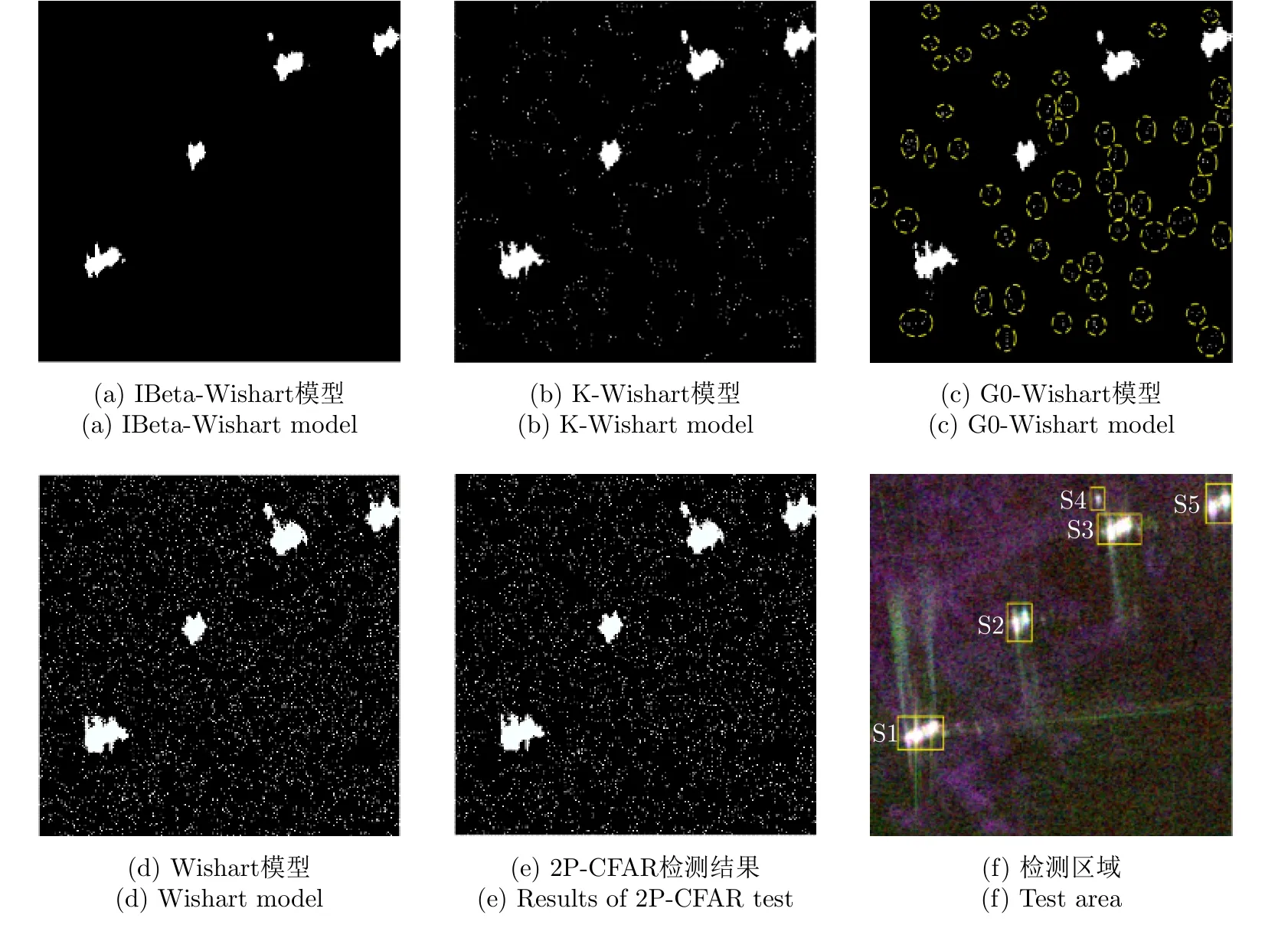
图3 各类纹理分布PWF处理结果[21]Fig.3 PWF processing results with different textural distributions[21]
在密集目标环境下,陶丁等人[27]提出了自适应截断方法来估计SAR图像统计模型参数,取得了较好的检测效果。刘涛等人[28]将其推广到PolSAR图像,推导了自适应截断极化协方差矩阵的结构和概率密度函数,在密集环境舰船目标检测问题上取得了较好的效果。在高分三号图像上的PWF检测结果如图4所示。图4(a)—图4(e)代表了不同的参数估计方法,图4(f)为RadarSat-2图像的伪彩图。黄框代表虚警,红框代表漏警。可以看出经过截断估计后进行准确参数估计的图4(a)效果提升非常明显,也表明了对密集区域杂波进行准确参数估计的必要性。
目前极化最优化技术逐渐与可解释性机器学习方法相结合,采取分类的优化准则进行目标检测[29],是提高小目标检测性能的新方法,可作为后续极化优化检测技术的发展方向。
2.3 基于散射机理的检测技术
由于舰船目标与海洋表面散射机理不同,存在的极化特征差异可以将舰船更容易从杂波中区分出来,因此基于极化散射特性的检测方法具有较强的物理解释性。由于海杂波具有反射对称性,Nunziata等人[30]提出反射对称(Reflection Symmetry,RS)检测器,利用共极化通道和交叉极化通道的相关性来检测目标。王娜等人[31]针对RS检测器进行了进一步的理论分析,推导了该检测器的CFAR解析表达式与参数估计方法。Marino等人[32,33]以杂波与舰船目标极化散射能量对比的角度出发,推导得出基于几何扰动的极化凹口滤波器(Polarimetric Notch Filter,PNF),并且得到了其相应的统计分布解析表达式[33]。高贵等人[34–36]将PNF应用到了高海况情形、混合极化情形和干涉情形,均取得了较好效果。2020年,刘涛等人[8]考虑电磁散射中能量的现实物理意义,修改了PNF表达式,并对其命名为新PNF (New PNF,NPNF),取得了较原PNF更好的检测性能,实验对比结果如图5(a)所示。NPNF取得的效果与PWF检测效果近似,PNF和NPNF的检测效果对比如图5(b)所示。
另一种基于散射机理的检测手段就是利用极化分解理论。极化分解是一种有效的目标散射机理分析工具,它将散射矩阵或者协方差矩阵按照不同的物理散射类型进行分解,并能够有效应用于PolSAR图像舰船目标检测[37]。1999年,Ringrose和Harris[38]首次将Cameron分解应用于星载成像雷达SIR-C数据,并将其应用于广域海面舰船目标检测。2000年,Touzi等人[39]在Cloude-Pottier分解的基础上,引入由极化协方差矩阵推导出的极化熵检测量,通过极化熵、特征值和散射角检测目标,有效地提升了目标和背景之间的差异,取得了较好的舰船检测效果[40]。陈炯等人[41]于2009年提出了极化交叉熵的概念,并利用AIRSAR数据证明了该特征检测的有效性。2013年,Sugimoto等人[42]将Yamaguchi提出的四分量模型的分解应用于ALOSPALSAR实测数据的舰船目标检测,该算法的优势在于解释和执行的简单性。杨健等人[43,44]将目标散射特性加入OPCE中,提出了广义极化对比增强方法(Generalized Optimization of Polarimetric Contrast Enhancement,GOPCE),取得了较好的检测效果,结果表明散射相似性的加入显著改善了目标检测能力。
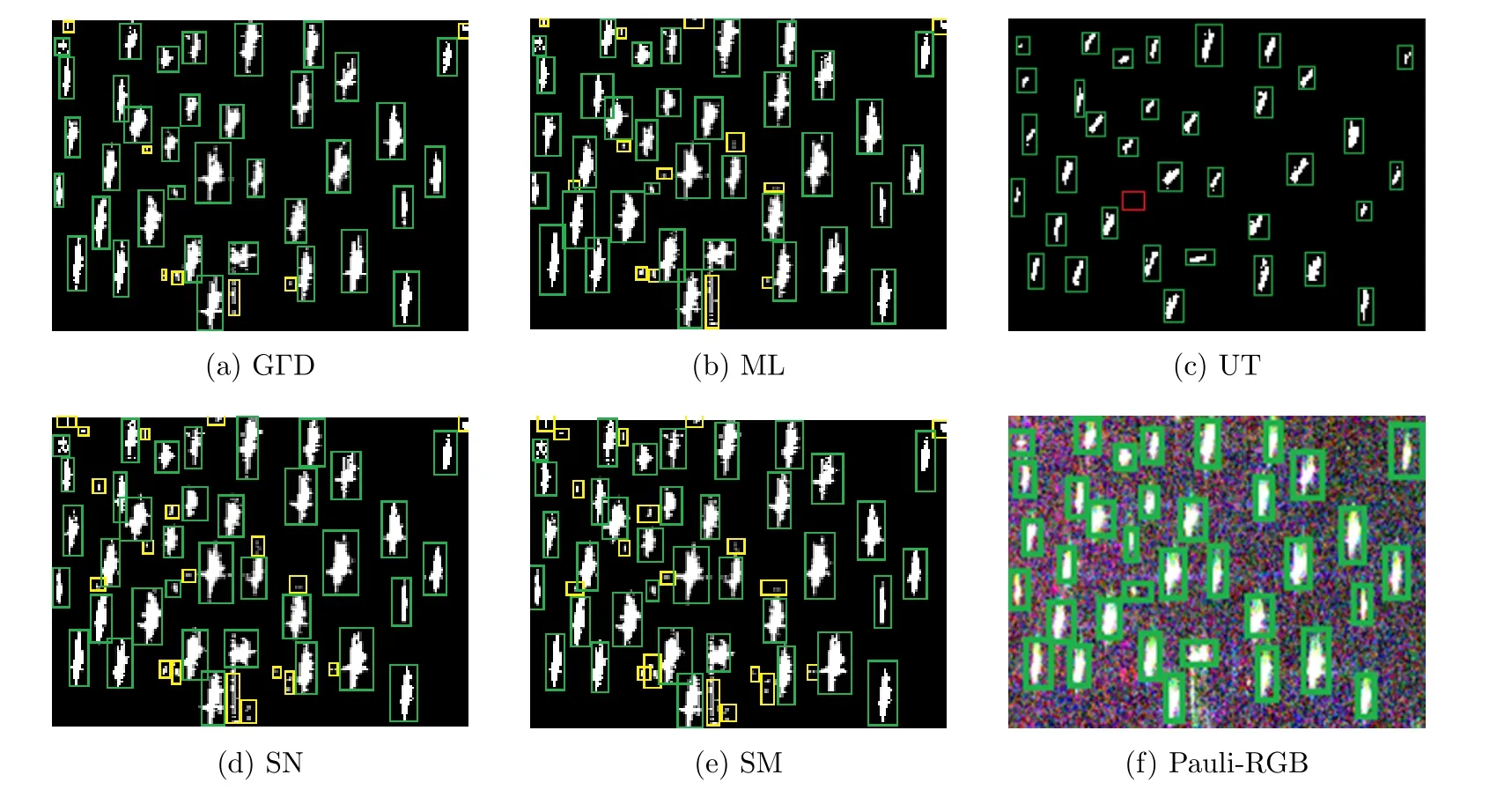
图4 基于自适应截断法的PolSAR图像密集目标检测[28]Fig.4 Dense ship detection in PolSAR images based on the adaptive truncation method[28]

图5 PNF与NPNF性能对比[8]Fig.5 Performance comparison of PNF and NPNF[8]
2015年,Touzi等人[45]利用去极化度的最优特征去检测舰船,并利用Radarsat-2实测数据证明了该算法能够有效检测舰船目标。2018年,高贵等人[36]将极化熵与散射能量融合在一起进行极化SAR图像舰船检测,取得了较好的效果,如图6所示。该方法体现出了能量域和极化域特征融合的优势,且更加有利于目标检测。2019年,Bordbari等人[46]将散射机制分为两类:属于目标的有目标散射机制和属于杂波的非目标散射机制,并采用子空间投影的方法抑制杂波,显著提高目标检测性能。目前单一的极化分解模型难以有效地表达目标和杂波的差异,因此研究新的极化分解模型,将不同极化分解模型的不同分量系数重新构成新的特征矢量,采取Fisher分类准则或者其他的特征矢量空间,亦可提高目标的检测性能[47],这也是当前基于极化分解理论的舰船目标检测的发展趋势。
2.4 基于空间邻域的检测技术
传统的极化SAR目标检测大多基于图像像素点的特征,而忽略了像素和像素之间,像素和邻域之间的关系,因此遇到包含有和舰船散射特性相似杂波的场景时性能将会降低。这些场景包括港口舰船检测和高海况舰船检测等。针对基于单点像素检测方法的缺点,为充分利用像素及其邻域之间的相关关系,像素块检测方法随之而来。最近的研究表明融合空域与极化信息能够大幅增强目标检测能力,通过挖掘空间邻域信息可以进一步增强目标检测的效果[6,48]。目前主要是基于超像素的目标检测和基于邻域矩阵的检测方法[7,48]。
超像素本质是散射特性相近点的集合,因此相似性的定义是其核心。王英华等人[49]提出了3种超像素级相似度定义来增强信杂比,并以此构建了一种自动检测算法,最后利用Radarsat-2的数据证明了该方法在低信杂比(Signal Clutter Ratio,SCR)情况下仍能达到较小的虚警率(Probability of False Alarm,PFA)。文献[50]提出了类似的利用舰船目标和海杂波极化散射相似度的超像素分割方法。崔兴超等人[51]通过相似度检验确定PolSAR图像的相似像素数(Similar Pixel Number,SPN),并提出基于此特征的目标检测方法,利用Radarsat-2和高分三号的实测数据证实了空域与极化信息的引入能够大幅增强PolSAR图像舰船目标的检测能力,如图7所示。这里绿色方框代表正确检测,黄色方框代表虚警,红色方框代表漏警。图7(a)—图7(d)分别为不同的检测方法,结果表明SPN方法优势明显。

图6 不同检测方法的小目标检测效果对比[36]Fig.6 Comparison of detection results among different methods for small targets[36]
Huang等人[52]提出了一种基于块间距离的PolSAR图像显著性检测模型,用极化相干矩阵在局部和全局两个尺度上度量极化像素块之间的相似性。Jäger等人[53]根据极化和空间信息定义了PolSAR图像熵,并提出了一种PolSAR图像显著性区域检测方法。Wang等人[54]基于像素块级极化协方差矩阵的相似性检验,提出了一种显著性检测方法。林慧平等人[55]先提出利用单极化条件下的超像素Fisher向量进行SAR图像舰船目标检测的方法,又在其博士学位论文中将PolSAR图像类比为彩色图像,对边缘感知超像素分割方法进行扩展,使超像素舰船目标检测方法适用于PolSAR图像。
在邻域矩阵构建上,张涛等人[56,57]借鉴光学局部二进制编码的概念相继提出极化协方差矩阵和完备极化协方差差异矩阵,利用幅度、相位、空域信息来区分舰船目标像素与海杂波像素。然而,最终的矩阵形式缺乏一些好的性质,如不是一个半正定矩阵,因此难以被解译为实际目标。由于舰船和海杂波都是空间相关的,而舰船会改变周围杂波的空间相关性,旁瓣同样影响邻域像素的相关性,因此刘涛等人[7]提出了邻域极化协方差矩阵(Neighbourhood Polarimetric Covariance Matrix,NPCM)并给出了基于NPCM的白化检测方法,与现有方法进行了对比,结果表明新方法性能突出,几乎是目前最佳的极化检测器,如图8所示。
NPCM结合了极化和空间特性,显著增加了舰船和海杂波之间的可分离性。但是存在邻域空间相关矩阵维数难以确定和维数过高的问题,后续在保持检测性能的同时针对邻域矩阵的降维处理以避免维数灾难是未来邻域矩阵发展的方向。同时邻域矩阵信息也可以与超像素分割结合,作为超像素分割的相似准则,有望提高空间邻域检测性能。
3 慢速运动目标检测方法
随着海况环境的不断恶化,淹没在海杂波内的慢小舰船目标的检测变得更加困难。为了更加全面地掌握海战场态势,获取目标的运动信息,地面运动目标检测(Ground Moving Targets Indication,GMTI)已经成为PolSAR系统需要完成的重要功能之一。运动目标检测算法主要分为距离多普勒域检测算法和图像域检测算法两类[58]。相比距离多普勒域,在SAR图像域操作具有设计要求低、运算量小、易于实现等优点,因此本文聚焦于图像域检测。高贵等人[59–61]对单极化情形下基于图像域慢动目标检测的研究较为深入。在这里我们主要关注极化信息的利用,因此将PolSAR-GMTI系统分为单通道PolSAR-GMTI与多通道PolSAR-GMTI,其中单通道是指单部极化雷达,多通道是指两部或者以上极化雷达。

图7 不同舰船目标检测方法与SPN的对比结果[51]Fig.7 Comparison results among different ship detectors with SPN[51]

图8 不同舰船目标检测方法与NPCM的对比[6]Fig.8 Performance comparision among different ship detection methods with NPCM[6]
3.1 单通道PolSAR-GMTI
早在1995年,Park等人[62]就进行了极化空时自适应处理(Space-Time Adaptive Processing,STAP)算法研究,提出了空域-时域-极化域自适应信号联合处理方法。研究结果表明:加入极化信息能够提高传统空域-时域自适应运动目标检测算法的运动目标检测性能。2003年,Park等人[63]又深入分析了极化信息在提高STAP算法性能方面的潜力。Wang等人[64]提出了基于极化干涉优化技术的运动目标检测算法。在此基础上,Friedlander等人[65]对于极化干涉优化之后的结果,利用VSAR速度估计原理进行运动目标速度估计。国防科技大学的刘忠训等人[66]对PolSAR图像动目标定位中的频域残差干涉相干性进行了分析。对位于像公路这样的随机粗糙面上的运动目标,加拿大的Yeremy等人在加拿大国防部基金的资助下,利用CV-580系统分别于 2002年6月8日在Petawawa和2002年9月24日在Ottawa进行了全极化SAR运动目标检测试验,并获得了大量可以进行实验分析的数据,Mattar等人[67]利用这些数据在2005年发表了一份专门的AD报告,研究了利用PolSAR数据进行运动目标检测的可行性。报告中提到了两种极化SAR运动目标检测算法,一种是基于单极化SAR数据的运动目标检测算法,另一种是基于两交叉极化通道的顺轨干涉(Along-Track Interferometry,ATI)处理方法。交叉极化ATI方法利用静止目标的交叉极化图像之间的互易性,通过两交叉极化通道SAR图像的ATI处理[67],实现运动目标检测,当然还可以利用两交叉极化通道SAR图像进行偏移相位中心天线(Displaced Phase Center Antenna,DPCA)处理,从而实现运动目标检测[67]。邹斌等人[68]提出将极化白化滤波器与时频分析法相结合的PolSAR运动目标检测方法,该方法通过对极化信息的利用增强了运动目标的信噪比,增强了目标图像的可见性,并通过Radon变换完成了对运动目标图像线型轮廓的检测。
Liu等人[69,70]分析了运动对极化SAR图像的影响。结果表明,对于具有互易性的散射体,HV和VH图像的相位差为零,而对于HV和VH模糊,其相位差为 π。指出运动将增强极化SAR图像的方位模糊,并将交叉极化相减应用到检测中,成功检测到了运动目标,其不同极化通道检测效果如图9所示。遗憾的是该方法同时增加了静止目标的模糊,也就是“鬼影”效果。如何利用交叉极化信息并同时实现静止目标模糊抑制和慢动目标检测,是该方法有待解决的一个问题。
3.2 多通道PolSAR-GMTI
多通道SAR增加了空间维信息,能够同时利用空间和时间两维信息,可更有效地抑制静止杂波、检测运动目标并且解决固有模糊问题。极化信息有助于提高干涉质量,提高干涉相位的估计精度[58],并有助于提高对慢速运动目标的检测性能[71]。为了突破单平台PolSAR-GMTI受到尺寸制约而导致最小可检测速度(Minimum Detectable Velocity,MDV)性能不足的限制,李延伟[72]提出了利用全极化雷达交替发射同时接收方式的虚拟基线,组合出3条新的虚拟基线,可以获得更优的最小可检测速度。在大量单极化多通道SAR-GMTI研究基础之上,加拿大国防研究与发展部(DRDC)为Radarsat-2设计了双通道极化(Dual Channel Polarimetric,DCP)波束模式,使用双通道与分时极化技术,将PolSAR成像与GMTI功能结合。Chiu等人在文献[73]中证明了该方法有助于在北极冰川地区检测舰船目标。由于2019年发射的“雷达卫星星座任务”(RADARSAT Constellation Mission,RCM)没有专门的GMTI功能,Chiu等人在文献[74]中提出了基于交叉极化产生“阴影”的双极化SAR图像的动目标检测方法,提供辅助的GMTI功能。
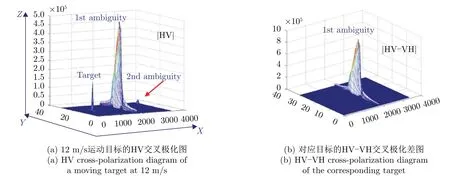
图9 PolSAR图像不同极化通道动目标检测效果图[69]Fig.9 Moving target detection results in different polarimetric channels in PolSAR images[69]
澳大利亚学者Stacy和Preiss[71]将ATI幅相检测拓展到类似于单通道的GLRT检测方法,并未进行深入的公式推导和分析。张鹏等人在文献[75]和文献[76]中针对当前干涉合成孔径雷达(Interferometry SAR,InSAR)慢动小目标检测的难点问题,研究了利用同时极化测量体制顺轨干涉SAR(Polarimetric Along-Track Interferometry SAR,PolATInSAR)提高慢动目标检测性能的新方法,结果表明新方法能够显著提高顺轨干涉系统对慢小目标的检测概率及径向速度估计精度,且易于实现CFAR检测,仿真结果如图10所示。随着RCM的成功发射以及后续我国高分系列星座架构的发展,对多站极化顺轨干涉处理的需求将更加明显。
当前正在开展的PolATInSAR的相关研究缺乏对实测数据的获取,为方便开展极化顺轨干涉技术的研究工作并尽快将其推向实用化,可以采取子孔径分解的方法获取虚拟干涉效果。日本科学家Ouchi[77]最早于1985年分析了运动目标在时域多视子图像中的特征,指出SAR多视图像的合成孔径中心之间具有一定的时间延迟,运动目标的二维速度、加速度在多视图像序列间会产生成像差异。在Ouchi的研究基础之上,1996年德国科学家Kirscht[78]首次将多视处理方法应用于SAR-GMTI,提出了单视图像序列法,即著名的子孔径分解法。该方法通过多个子孔径图像序列相减达到杂波抵消并保留运动目标的目的。在子孔径分解方法上,中国科学院以及北京航空航天大学的学者[79–82]对此做出了多种改进,将其与多通道SAR-GMTI中的方法结合在一起取得了良好的效果。2015年,Marino等人[83]总结了子孔径分解后的目标检测算法,给出了检测性能对比结果。后续有望通过维数扩展的方法将子孔径分解推广到PolSAR方向,以取得更好的PolSAR-GMTI效果。

图10 极化顺轨干涉动目标检测仿真结果[76]Fig.10 Simulation results of polarimetric along-track interferometry moving target detection[76]
4 舰船目标尾迹检测方法
尾迹检测能够判断舰船目标的航向、航速等诸多信息,具有极大发展空间,为PolSAR小目标和隐身目标的探测提供了新思路。尾迹的检测实际上都可以归结为通过尾迹和背景在能量上的差别进行检测。尾迹检测主要通过尾迹边缘线性特征提取和尾迹区域与背景散射特性差异区分两种途径。种劲松等人[84]指出需要考虑的问题有:(1)尾迹是具有一定宽度的线性特征体;(2)尾迹的灰度可能比海面背景亮,也可能暗;(3)尾迹不一定笔直,有时会成曲线状;(4)SAR图像具有内在的相干斑噪声;(5)图像中可能存在其他非尾迹的线性结构。
1992年,Schuler等人[85]研究了P波段交叉极化下船尾迹Kelvin波的一个臂的极化特征。1999年Pottier等人[86]提出了采用极化特征值分解中特征向量的船尾迹分类方法,利用神经网络的非监督分类方法,对模拟的全极化Kelvin尾迹数据进行了分类,分类的样本采用极化特征分解后的旋转不变量组成的特征矢量,但在分类结果中没有明确给出这些特征量分别代表了尾迹怎样的物理意义,也未对实测数据进行验证[87]。1999年Hennings等人[88]分析了SAR图像上Kelvin臂模型,得出Kelvin臂在雷达图像上的可见性很大程度上不取决于雷达频率,而是取决于雷达极化方式,HH极化时,Kelvin臂在雷达图像上的可见性比VV极化高;入射角小时,Kelvin臂在雷达图像上的可见性高[89]。2001年Wu和Imbo等人[87,90]研究了极化SAR图像中的尾迹特征,对极化协方差矩阵进行Radon变换来检测船尾迹,文中讨论了两种尾迹类型检测方法,一种是利用PWF处理后的最优通道组合进行尾迹检测,另一种是在极化协方差矩阵的6个通道分别进行Radon变换,利用马氏距离判断峰值,然后逆变换的方法进行尾迹检测。第1种极化信息利用不完全,第2种虽然利用了全部通道的极化信息,但运算量大。最终检测结果如图11所示,绿线代表检测出的尾迹。

图11 PWF与Radon变换实现尾流检测[90]Fig.11 Wake detection results by PWF and Radon transform[90]
2002年Kasilingam等人[91]研究了海洋极化相关系数,提到了在同极化相关系数图像上可以看到湍流尾迹,并指出表面小尺度粗糙程度的改变不会调制同极化相关系数,但没有给出该参数是否利于Kelvin尾迹的检测。2002年Morris等人[92]针对低掠入射角下船尾迹的检测与分析问题,仔细研究了一个领航艇的尾迹内部和周围海面的极化特征空间分布,由于非线性效应,极化特征在空间域高度非均匀分布,当从尾迹区域移动到周围海域,对应的特征向量分布产生一个强转变,此发现有助于识别尾迹和杂波区域。2003年Morris等人[93]又提出了一种基于熵的尾迹回波分析方法,通过对协方差矩阵进行特征值分析,解决了低掠射角下的船尾迹检测和分析问题,使用DSTO (Defence Science and Technology Organisation)的高分辨雷达系统获得了一个工作在菲利浦港湾的领航艇所产生尾迹的极化测量结果,并对协方差矩阵数据采用极化分解,得到了极化熵、散射α、各向异性图,然后采用适当的门限来识别尾迹和杂波区域。2004年Yang等人[94]使用AIRSAR和SIR-C/X-SAR获得的全极化数据来分析海洋特征(例如海浪、油膜、船尾迹、海洋前沿和海底地形)的雷达特征,并给出了观测这些特征的最优极化方式。分析不同极化下的船尾迹图像得出,多数情况下,HH和RL极化优于VV极化。2006年Arnold-Bos等人[95]提出了一个多用途双基极化海用雷达模拟器,包含尾迹的生成。2011年Wu等人[87]基于SAR图像中Kelvin波与海杂波的散射机制的差异,采用多波段和全极化,提取和研究了Kelvin波的极化特征。该文献提出简单共极化率可以增强Kelvin波,并聚焦极化分解的应用,提取能更完全地代表Kelvin波特征的极化熵,并给出其物理意义。2018年Xu等人[96]介绍了一种新的“两步”(粗糙和精细处理)检测器来检测SAR图像中的微弱湍流尾迹,该方法基于极化分解理论,提出了一个新的增强尾迹与海面差异的参数——表面散射随机性(Surface Scattering Randomness,SSR)。在粗糙检测过程通过SSR的DAT变换(Digital Axoids Transform)提取潜在的船尾迹区域;在精细检测过程中,由粗糙检测得到的区域在极化特征域被分离并单独处理;最后,通过引入正则化最小二乘法(Regularity Least-Squares,RLS),获得了船尾迹的线性参数,同时从Radon变换中获得先验信息。该方法基于Radarsat-2数据开展了实验,结果表明,相较于现有的基于Radon或Hough变换的检测器,该算法具有很强的从极化SAR图像中检测出微弱湍流尾迹的能力。2018年Biondi[97]提出了一个通过Kelvin尾迹自动检测船舶目标运动参数的完整过程,算法通过两阶段低秩稀疏分解(Low-Rank plus Sparse Decomposition,LRSD)结合Radon变换来实现杂波抑制、稀疏目标检测、精确的尾迹倾向以及Kelvin波谱分析,通过凸规划实现基于稳健/鲁棒主成分分析(Robust Principal Component Analysis,RPCA),可以从不变的低秩背景中推断出感兴趣的稀疏目标,包括船舶目标和Kelvin波。2019年Biondi[98]又考虑了SAR图像的极化信息,实现了多通道的两阶段极化低秩稀疏分解(Pol Low-Rank plus Sparse Decomposition,Pol-LRSD),升级的算法实现了感兴趣的稀疏目标极化特征的提取,也使得船舶目标的检测更为准确,结果如图12所示。可见通过结合稀疏表征、极化特征和机器学习优化理论进行尾迹检测将是未来趋势。
5 基于深度学习的目标检测方法
近年来,基于深度学习算法在光学目标检测领域取得了巨大的成功。SAR图像中应用CNN深度网络与光学图像的区别主要体现在3点,其中在极化SAR图像中体现得就更加明显:特征差异显著、数据量较小和对观测条件敏感[99]。各国学者将这些光学检测算法推广到SAR图像的舰船检测方法的研究中,展现了深度学习在复杂海面环境中优越的检测性能。深度学习的核心是通过层次化的特征提取结构,即用深层结构来表征原始数据。深度学习的本质可以看作一个多层嵌套的非线性拟合函数,它巧妙地通过随机梯度下降算法将网络训练到合适的拟合精度。深度学习目前取得巨大成功可以认为是卷积层的出现以及规则性线性单元(Rectified Linear Unit,ReLU)激活函数的使用[100]。ReLU作为最佳激活函数的理由是其与神经元相似,因为神经元对某些输入没有反应,对有些输入的反应呈单调关系,每一时刻处于激活状态的神经元总是稀疏的。以卷积神经网络(Convolution Neural Network,CNN)为代表的方法结构灵活、能够自动提取结构化特征,不仅能提取图像的低维特征,而且能提取图像的高维特征,从而更好地对目标进行识别和分类[100],目前已成为SAR舰船目标检测领域的研究热点,并开展了丰富的研究工作[101]。高贵[102]将二值化赋范梯度方法(Binarized Normed Gradients,BING)和快速区域卷积神经网络(Faster Region-Convolutional Neural Network,Fast R-CNN)结合,提高了检测性能。张晓玲等人[103]针对实时性要求较高的SAR舰船检测场合,提出一种基于深度分离卷积神经网络(Depthwise Separable Convolution Neural Network,DS-CNN)检测方法,效果明显。
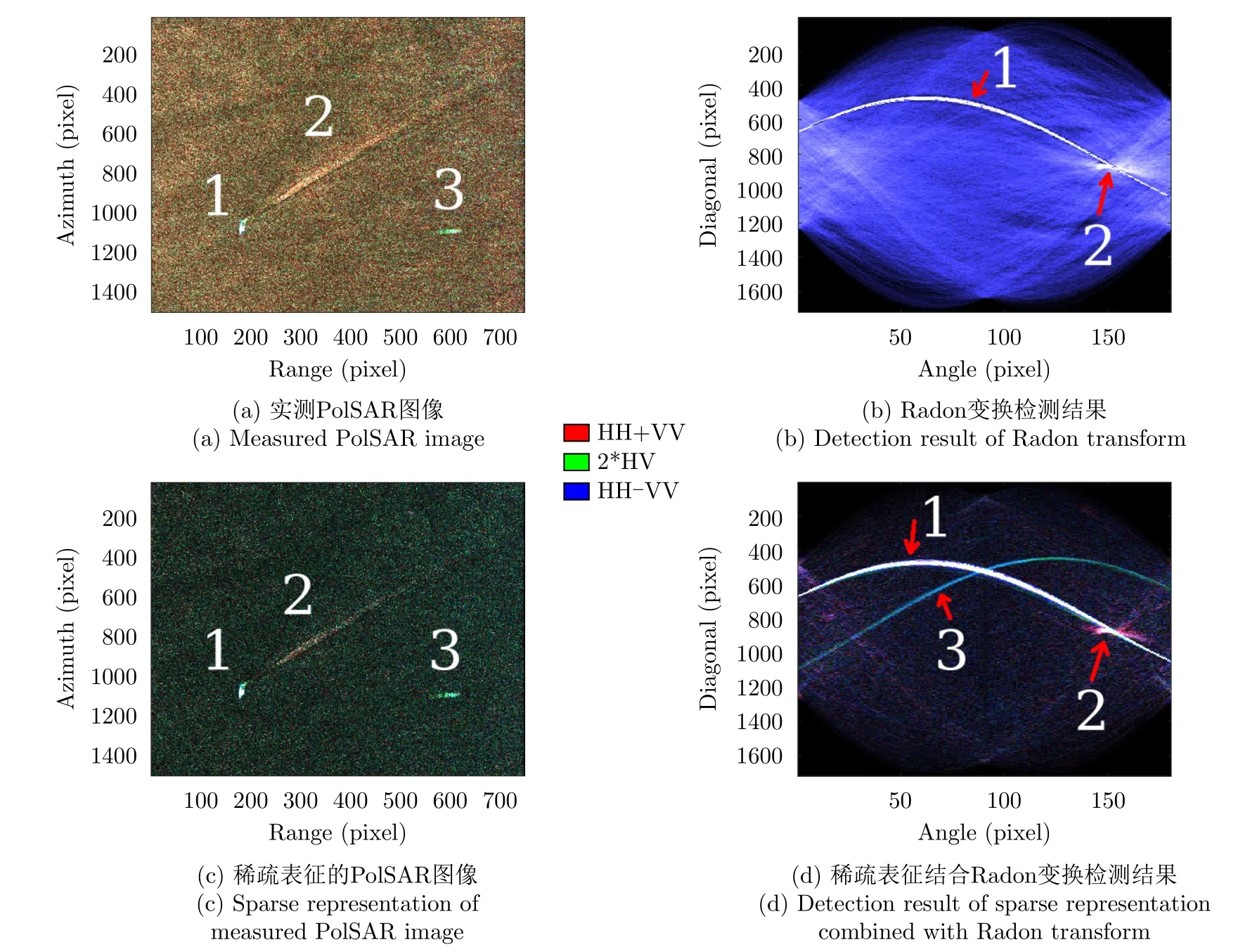
图12 低秩稀疏分解与极化结合的舰船尾流检测结果[98]Fig.12 Ship wake detection results of low-rank and sparse decomposition combined with polarization[98]
然而利用CNN来进行PolSAR舰船检测的公开文献相对有限[104–108]。文献[104]采用了类VGG网络来进行舰船检测,文献[105,106]采用了改进的Faster RCNN网络来进行舰船检测,和前面类似,它们同样采用了拥有巨大参数的网络,容易在训练数据集上过拟合。Cozzolino等人[108]提出了一个小网络用于SAR目标检测。这个小网络直接可以在有限的SAR 和PolSAR数据集上训练,但是他采用了最大池化(maxpooling)的手段,最大池化的使用将会使得那些小目标容易丢失。当然,很多基于CNN的SAR图像舰船目标检测的方法理论上都可以拓展到极化SAR图像上。金侃等人[107]提出了一种用于PolSAR图像中小船检测的像素块-像素卷积神经网络(Patch to Pixel CNN,P2P-CNN),检测结果如图13所示。P2P-CNN表现出良好性能,其中图13(a)为该网络的主体结构,是带crop的4层Dense Block架构,其中采用乘法操作将各个block的特征结合起来。这种结合方式一方面起到跳线连接的作用,避免梯度消失问题,使得训练更加顺畅;另一方面结合多层语义,利用高层语义特征强大的表达能力和底层语义特征对于微小变化的敏感性,共同判断中心像素是否是舰船,大大减少了虚警。考虑到PolSAR标注数据的有限性,需要减少网络的参数以降低过拟合的风险。因此通过引入密集连接模块,利用特征复用减少网络的宽度,通过引入空洞卷积,在不改变参数的情况下增大感受野,减少网络的深度。结果表明P2P-CNN检测性能提升明显。如何将目前基于深度学习的单极化SAR图像目标检测方法应用到PolSAR图像上,充分利用感受野和极化特征,构建新的网络结构,是深度学习在PolSAR目标检测的未来趋势。
如果利用深度学习识别舰船尾迹,需要获取大量的含有舰船尾迹的SAR图像进行网络训练,而实际中研究人员拥有真实的SAR尾迹图像数量极少,并不适用于利用深度学习的方法进行识别,因此目前研究者利用深度学习进行SAR图像舰船尾迹识别的研究相对较少[109]。美国Fitch等人[110]对NASAJPL机载AIRSAR图像,使用人工神经网络的方法帮助判读Radon变换后的尾迹。Kang等人在文献[111]中采用卷积神经网络与SAR图像结合检测到船与尾迹之间的方位角偏移,并研究了使用该偏移进行船速自动检测的潜力。

图13 P2P-CNN网络结构及其检测性能[107]Fig.13 P2P-CNN network structure and detection performance[107]
6 总结与展望
本文详细梳理了PolSAR舰船目标检测的不同技术途径、发展脉络和存在问题,表1给出了各类方法的优缺点以方便感兴趣的研究人员参考。
随着雷达技术的不断发展和进步,预见未来PolSAR舰船目标检测的发展趋势如下:
(1) 目前最优极化技术逐渐与可解释性机器学习方法相结合,采取最优化准则进行目标检测,可能是提高小目标检测性能的新方法,可作为后续极化优化检测技术的发展方向。将不同极化分解模型的不同分量系数重新构成新的特征矢量,采取Fisher分类准则或者其他的特征矢量空间,亦可提高目标的检测性能,这也是当前基于极化分解理论的舰船目标检测的发展趋势。

表1 PolSAR图像舰船目标检测方法适用场景和优缺点总结Tab.1 Applicable scenarios and pros &cons summary of PolSAR ship detection methods
(2) 在目标密集环境下,除了目标和杂波之间的污染容易引起漏警之外,舰船目标群还存在着分裂、合并等引起图像解译困难的问题,有针对性地进行密集目标混淆的分离、分裂目标的合并也是未来舰船目标检测的研究方向。
(3) 充分利用干涉处理技术,发展分布式全极化雷达一体化系统。干涉与极化同属多维信息处理范畴,通过空域信息与极化域信息的扩展,有望显著提升PolSAR慢小目标舰船目标检测能力。
(4) 统计模型的复杂性与参数估计准确性与样本数的需求仍然存在矛盾,杂波的统计模型与参数估计理论进一步完善。随着PolSAR分辨率的提高和海况复杂化的新情况,期待提出统一普适的杂波极化协方差矩阵统计建模框架,并推导其CFAR检测闭合表达式将有助于完善基于统计理论的PolSAR舰船目标检测理论。
(5) 紧密结合深度学习等人工智能技术,通过少量数据驱动PolSAR舰船目标检测工作,不仅聚焦于舰船目标本体的检测,同时也聚焦于舰船尾迹特征的提取,进一步增强PolSAR图像舰船目标检测能力。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:07:10
电子设计工程(2022年12期)2022-06-29 06:08:20
科学与信息化(2021年30期)2021-12-24 08:00:20
舰船科学技术(2021年12期)2021-03-29 01:28:44
北京航空航天大学学报(2017年2期)2017-11-24 05:24:53
舰船科学技术(2016年1期)2016-02-27 15:39:26
西北工业大学学报(2015年3期)2015-12-14 13:08:44
遥测遥控(2015年2期)2015-04-23 08:15:22
现代防御技术(2014年6期)2014-02-28 18:26:39
雷达学报(2012年4期)2012-10-03 12:25:02