融合极化旋转域特征和超像素技术的极化SAR舰船检测
2021-03-04 13:45:38崔兴超陈思伟
雷达学报 2021年1期
崔兴超 粟 毅 陈思伟
(国防科技大学电子科学学院电子信息系统复杂电磁环境效应国家重点实验室 长沙 410073)
1 引言
SAR作为一种主动式微波成像雷达,能够全天时全天候工作,是当前对地观测领域的主要手段之一,发挥着不可替代的重要作用[1,2]。在SAR的诸多应用之中,舰船检测一直是研究热点之一。提高舰船检测水平有助于加强海运交通管理、提高海防预警能力,在民用和军用领域都有现实紧迫性[3]。传统的SAR图像舰船检测算法,主要包括特征提取和检测器设计两个方面,研究人员针对上述两方面开展了大量的研究,提出了一系列行之有效的舰船检测算法。
在特征提取方面,主要包括单通道SAR和极化SAR两种。对于单通道SAR图像,舰船目标的幅度和强度明显高于海杂波背景,因此SAR图像的幅度和强度是舰船检测中应用最广泛的特征[4–6]。将舰船目标整体考虑,其统计特性与海杂波背景有明显差异,研究人员由此提出了基于方差、改进的标准差、空间分布、非相干熵等特征的SAR舰船目标检测方法[7–10]。为进一步分析舰船的整体结构属性,光学图像处理领域的超像素分割技术[11]被引入SAR舰船目标检测中。考察SAR图像中舰船目标在超像素级的统计特性,研究人员提出了基于显著性特征和加权信息熵的舰船检测方法[12,13]。对于低信杂比SAR数据,部分舰船目标和海杂波的幅度相近难以区分。针对这一问题,研究人员考察了舰船和海杂波在不同子孔径图像中的相干特性。一般来讲,相对于海杂波背景,即使是弱舰船目标在子孔径图像间的相干性仍然很强,研究人员由此提出了基于子孔径相干法的舰船检测方法[14]。相较于单通道SAR,极化SAR能够提供目标完整的极化散射矩阵,可资利用的信息更加丰富[15–17]。基于极化SAR数据散射机理、局部分布等信息,研究人员提出了融合超像素技术的极化SAR舰船检测方法[18,19]。极化目标分解是极化SAR图像解译的重要工具之一,可将散射体的散射分量分解成表面散射、偶次散射、体散射、螺旋散射等多种基本散射分量,通过分析各基本散射分量的能量等物理参量,解译散射体的散射机理[20–23]。根据舰船和海杂波在极化散射分量上差异提取极化特征,可实现极化SAR舰船检测[24,25]。基于极化相干矩阵相似性检验[26],可提取能有效区别舰船和海杂波背景的极化显著性特征。研究人员由此提出了基于显著性特征的极化SAR舰船检测方法[27,28]。除极化相干矩阵之外,研究人员通过考察相邻极化协方差矩阵之间的差异,基于极化协方差差异矩阵进行极化目标分解,并提取极化特征应用于舰船检测[29,30]。另外,舰船目标作为典型的人造目标,具有明显的散射非对称性。研究人员利用舰船目标和海杂波背景的散射对称性差异,提出了基于共极化通道和交叉极化通道相关模值的极化SAR舰船检测方法[31,32]。上述各类算法或从统计特性出发,或从散射特性出发,最终目的都是提取能有效区分舰船目标和海杂波背景的SAR图像特征。随着SAR图像分辨率的提升和极化SAR获取信息维度的扩展,海杂波呈现更加复杂的统计和散射特性,提取有效的SAR图像特征仍具有重要意义,值得进一步分析挖掘。
在检测器设计方面,研究人员同样开展了大量的工作,取得了丰硕的研究成果。恒虚警率(Constant False Alarm Rate,CFAR)检测器,具有算法效率高、自适应阈值等特点,是SAR图像舰船检测中应用最广泛的检测器之一[4–6,33–36]。CFAR一般采取中空的矩形滑窗结构,选取背景窗中的像素点用作后续的杂波统计建模和恒虚警率检测。但在实际数据中经常出现杂波边缘、多目标干扰等现象,这会影响海杂波的准确建模,进而影响CFAR检测性能。为解决上述问题,研究人员提出最大选择CFAR (Greatest Of CFAR,GO-CFAR)[37]、最小选择CFAR (Smallest Of CFAR,SO-CFAR)[38]等改进型,将背景窗内像素点分成若干部分,通过取大和取小处理,分别能够一定程度上解决杂波边缘和多目标干扰的问题。在近年来,相关文献中提出了一系列统计建模样本点选取优化方法,通过自适应迭代算法选取合适的样本点用以统计建模,获得了较好的检测性能[39–41]。考虑到传统的CFAR滑窗一般采用局部滑窗结构自适应地计算门限,在处理大尺度图像,尤其是舰船稀疏分布的广域海面时,算法的检测效率有较大提升空间。为解决这一问题,研究人员提出了改进的双阶段CFAR检测器,先通过全局CFAR得到候选目标区域,再对候选目标区域进行精细化CFAR检测,取得了良好检测效果,并能够大幅缩短算法运行时间[13,39,42]。除了CFAR检测器之外,研究人员根据舰船目标和海杂波背景的统计特性差异,构建广义极大似然比检测器,将舰船目标检测问题转变成假设检验问题[43]。基于极化SAR数据,通过考察舰船目标散射机理的几何扰动特性,研究人员提出了极化凹口滤波器用于极化SAR舰船检测[44–47]。除了上述基于统计的检测器之外,随着深度学习理论和方法的不断发展与推广应用,数据样本驱动的深度学习检测器被用于SAR舰船目标检测,获得了良好的检测性能[48–50]。需要指出的是,基于深度学习的检测方法需要大量的数据样本驱动,是一种端到端的检测方法,这与传统的基于SAR图像解译的检测方法有本质差异。对于密集区域的舰船检测问题,基于数据驱动的检测器受限于样本数量,而传统的基于图像解译的检测器仍然无法有效解决多目标干扰问题,由此带来的门限过高估计不可避免地导致目标漏检。针对上述问题,本文提出一种融合极化旋转域特征和超像素技术的极化SAR舰船检测方法,以提高密集区域的舰船检测性能。
针对SAR图像舰船检测中的关键环节,特别是围绕密集区域的舰船检测问题,本文从特征提取和检测器设计两个方面出发,提出一种融合极化旋转域特征和超像素技术的极化SAR舰船检测方法,并基于实测数据开展对比实验验证方法有效性。本文内容安排如下:第2节介绍极化旋转域特征提取与优选;第3节提出融合极化旋转域特征和超像素技术的舰船检测方法;第4节开展对比实验研究;第5节为结论部分,总结全文。
2 极化旋转域特征提取与优选
雷达目标的后向散射敏感于目标姿态与雷达视线的相对几何关系,这种散射多样性中蕴含着丰富的极化散射信息[51]。针对这一隐含信息,研究团队在绕雷达视线方向,提出了极化旋转域的概念,将特定成像几何关系下获得的目标极化矩阵拓展到绕雷达视线的极化旋转域,提出了统一的极化矩阵旋转理论方法[52]和极化相干/相关特征旋转域可视化解译理论方法[53,54],建立了在极化旋转域解译目标散射机理的理论框架,在目标检测、地物分类等领域获得成功应用[54,55]。
2.1 极化相关方向图及特征提取
水平和垂直极化基下,全极化数据可以表征为极化散射矩阵,即

其中,SHV表示水平极化发射、垂直极化接收的后向散射系数,其他变量类似定义。将极化散射矩阵绕雷达视线旋转角度θ,其中θ ∈[−π,π),可得到旋转域极化散射矩阵

其中,上标T表示转置且旋转矩阵为

极化SAR数据不同极化通道之间的相关值包含丰富的目标散射信息[54]。考察极化通道s1和s2,其极化相关值定义为

将极化相关值扩展到绕雷达视线的极化旋转域,定义两极化通道之间的极化相关方向图为

为直观地展示极化相关方向图特征,在Radarsat-2实测数据中随机选取1个海杂波像素点和1个舰船像素点构造极化相关方向图|γHH-VV(θ)|,分别如图1(a)和图1(b)所示,极化相关原始值、最大值、最小值、极化相关对比度、最大化旋转角、最小化旋转角、波束宽度等极化旋转域特征标记在图1中。中低海况下,海杂波区域一般以表面散射为主,而舰船目标以二次散射为主,且包含表面散射、体散射、螺旋散射等多种散射机理,海杂波和舰船目标散射机理的差异导致了其极化相关值在极化旋转域变化趋势不同。由图1可得,海杂波和舰船像素点的极化相关值的取值大小及其变化趋势具有显著差异。对于海杂波像素点,极化相关值较小且对于夹角不敏感,变化趋势类似圆形。而舰船像素点的极化相关取值大,比海杂波像素点相关值高近两个数量级,且十分敏感于雷达视线与目标姿态的夹角,极化相关值变化趋势呈现四叶草状。舰船目标和海杂波背景在极化相关方向图中存在显著差异,有望从中提取和优选极化特征用于后续的舰船目标检测。
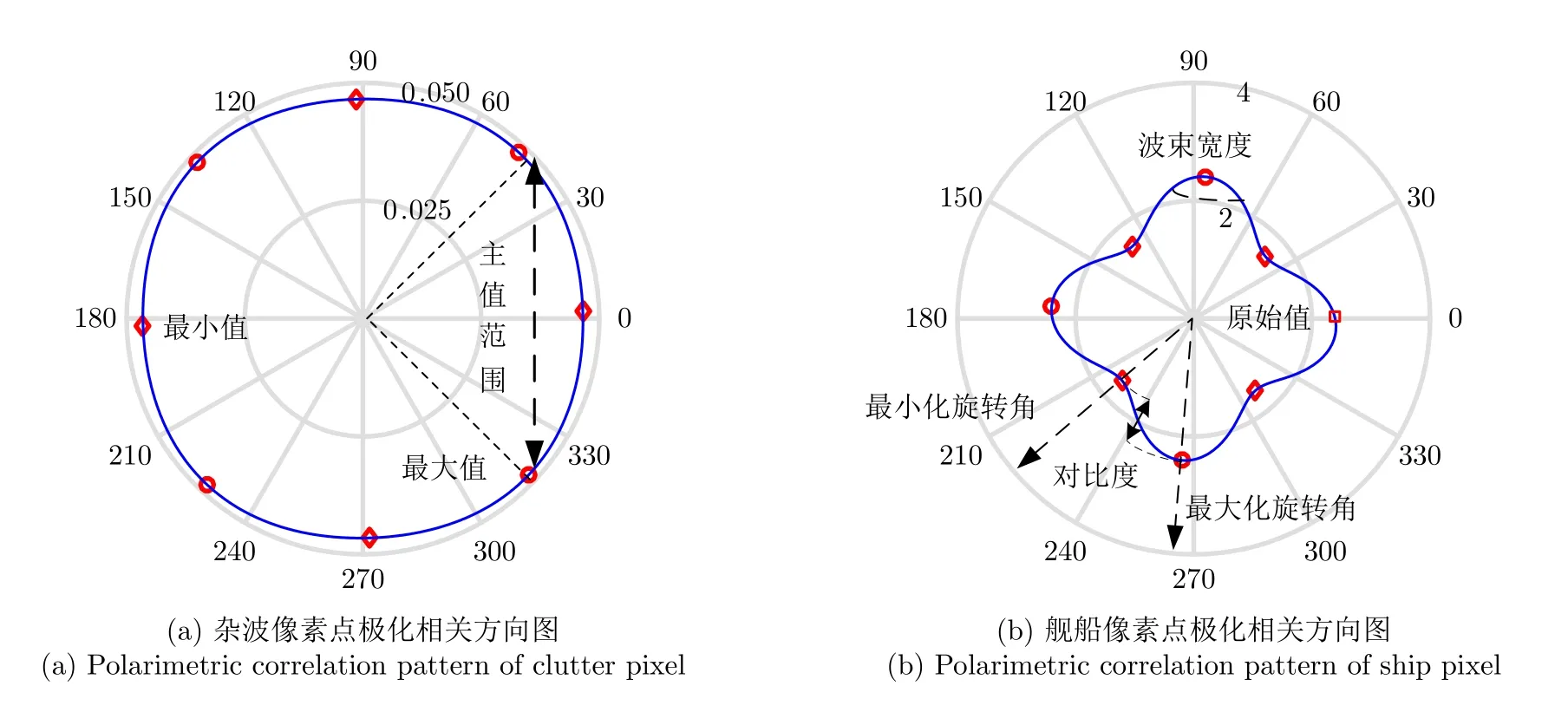
图1 极化相关方向图可视化表征Fig.1 Visualization of polarimetric correlation pattern
2.2 极化旋转域特征优选
目标杂波比(Target-to-Clutter Ratio,TCR)可以反映极化特征在目标检测中的应用潜能。一般来讲,TCR越大表示该极化特征中目标和杂波背景之间的差异越大,目标检测性能越好。因此,本文以TCR为指标分析优选极化特征。具体地以Radarsat-2数据为例,随机选取10个面积相等的包含舰船目标的区域,该区域极化特征的均值作为目标的极化特征值;再选取10个相同面积的杂波背景区域,该区域极化特征的均值作为杂波的极化特征值,目标的极化特征值和杂波的极化特征值之比即为该极化特征下的TCR。
统计Radarsat-2数据中10个舰船目标和杂波背景区域间的TCR如图2所示。图2包含4组,每组7个,共计28个极化相关方向图特征的TCR。除去4个极化相关特征反熵γ-A外,其他24个特征的TCR都远大于1,从TCR的角度考虑,这些特征都有用于舰船目标检测的潜能。这其中,TCR最高的极化相关特征是,其TCR为449.17。其次是,TCR分别是208.83和118.91。本文优选TCR最高的3个极化旋转域特征,用于后续的舰船目标检测。
3 融合极化旋转域特征和超像素技术的舰船检测方法
3.1 融合极化特征和超像素技术
近年来,在光学图像处理领域获得成功应用的超像素技术[11]被引入SAR图像舰船目标检测中,并取得良好效果[12,13]。随着SAR图像分辨率的提升,舰船目标在SAR图像中可能包含几百甚至上千像素点,传统的基于像素点的SAR图像舰船检测方法未能将舰船目标作为整体考虑。以经典的CAFR检测器为例,其滑窗结构选取的背景像素点中难免会存在其他目标的干扰,由此导致门限的过高估计并带来检测结果中目标断裂、空洞等多种问题。而超像素分割技术能够将舰船目标和海杂波背景分割在不同的超像素中,可在最大限度上选取纯净的背景像素点。基于超像素方法的性能优势,本文将极化旋转域特征和超像素技术相结合,提出融合优选极化特征和超像素技术的舰船检测方法。简单线性迭代聚类方法(Simple Linear Iterative Clustering,SLIC)是具有代表性的超像素分割方法之一[11],具有运行速度快、占用内存小、适用于不同维度图像等性能优势,本文中即选取SLIC方法用于超像素分割。
针对优选的3个极化相关方向图特征,可将单个特征视为灰度图像进行超像素分割,也可基于3种不同的极化特征构造红绿蓝(Red-Green-Blue,RGB)伪彩色图像,再进行超像素分割。从图2可得,优选的3个特征TCR高,即舰船目标和海杂波背景取值差异大。将优选的3个极化特征归一化之后分别作为3个通道可构造RGB伪彩色图,可以直接应用SLIC方法进行彩图分割。在不同通道极化取值差异的调制下,超像素技术可将舰船目标和海杂波背景分割开来。
3.2 背景像素点提取
恒虚警率类检测器的设计过程中,选取纯净的海杂波像素点对后续的舰船目标检测至关重要。特别地,在舰船目标密集区域,传统的CFAR模型的背景窗受多目标干扰的影响可能会包含邻近目标像素点,由此带来的门限过高估计问题会严重降低目标检测性能。基于超像素分割技术,舰船目标和海杂波背景被分割在不同的超像素单元,使得提取纯净的海杂波像素点成为可能。将舰船目标作为整体来考虑,其内部结构复杂,散射类型包括但不限于甲板引起的表面散射、船体与水面引起的二次散射、复杂天线结构引起的螺旋散射等,复杂的散射机理使得舰船超像素内部的极化特征取值差异较大,具有较高的标准差。而在中低海况下,海杂波可视为表面散射,故海杂波超像素的极化特征取值相近,且标准差较小[7]。
基于上述分析,标准差可有效区分舰船超像素和海杂波超像素。为了自适应地提取海杂波像素点,本文采用K均值聚类算法,基于超像素的标准差将其自适应地分为舰船超像素和海杂波超像素。以Radarsat-2数据为例,该区域包含陆地和密集的舰船目标,Pauli图如图3(a)所示。该数据的详细信息见4.1节实验数据介绍部分。需要指出的是,在超像素分割前已对该区域进行海陆分割,舰船和海杂波区域的RGB伪彩色图超像素分割结果如图3(b)—图3(d)所示,其中图3(b)是原始分割结果,图3(c)和图3(d)分别是海杂波超像素和舰船超像素的聚类结果。图3(b)中,超像素分割技术能够将舰船目标和海杂波背景分割在不同的超像素中,取得良好的分割效果。图3(c)和图3(d)中,K均值聚类方法能够有效地分离舰船超像素和海杂波超像素。
3.3 融合极化特征和超像素技术的舰船检测
SO-CFAR通过对背景像素点分组,选取均值最小的一组用于海杂波的统计建模和门限求解,适用于密集区域舰船检测问题[38]。综上,本文提出一种融合极化旋转域特征和超像素技术的极化SAR舰船检测方法,算法流程如图4所示,主要包括极化特征提取和极化检测器设计两个环节,其中恒虚警率设为10–4。
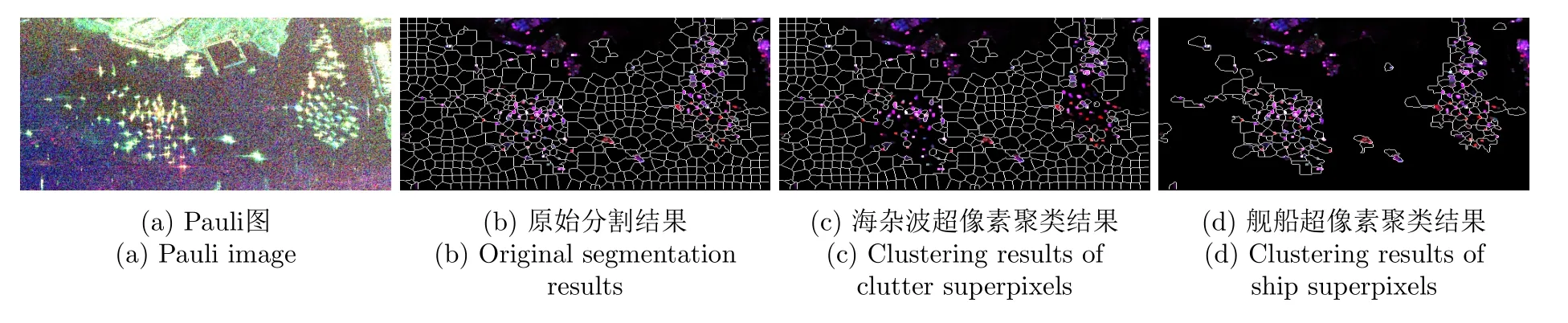
图3 Radarsat-2数据及其超像素分割结果Fig.3 Radarsat-2 data and its superpixel segmentation results

图4 融合极化旋转域特征和超像素技术的舰船检测方法流程图Fig.4 Flowchart of ship detection method combing polarimetric rotation domain features and superpixel technique
首先,将两极化通道之间的相关值扩展到绕雷达视线的极化旋转域,导出包括原始极化相关值、极化相关最小值等在内的一系列极化相关特征。其次,根据目标杂波比(TCR)分析,优选TCR 最高的和构成RGB伪彩色图并进行超像素分割。最后,将3个通道幅度相加得到最终的融合特征,针对分割后的超像素进行K均值聚类得到纯净的背景像素点集合,结合恒虚警率检测和形态学滤波处理得到最终的舰船检测结果。
4 对比实验
4.1 实验数据介绍
选取加拿大Radarsat-2和中国高分三号星载SAR全极化数据开展实验验证。C波段Radarsat-2精细全极化数据于2008年12月16日在中国香港海域获取。该数据大小为300像素×500像素,包含陆地、岛屿和137艘舰船目标,最小舰船目标在真值图中占12个像素点。该区域舰船目标较小且分布较为密集,开展舰船目标检测实验具有一定挑战性。另有两景C波段高分三号全极化条带模式I全极化数据,成像区域覆盖中国香港海域。第1景数据成像时间是2017年3月15日,数据大小为3450像素×2150像素,该数据共包含242艘舰船,最小的舰船在真值图中占52个像素点。第2景高分三号数据的成像时间是2017年3月30日,数据大小为1000像素×1000像素。该数据共包含44艘舰船,最小的舰船在真值图中占22个像素点。两组高分三号数据分别命名为高分三号数据I和高分三号数据II。需要指出的是,本文是基于像素级的检测方法,其检测结果中可能存在独立连通区域引起的虚警,这些虚警可能来自海杂波区域的强点以及舰船目标周围的强散射区域。在目标级的评价体系中,这类虚警会严重影响检测性能的评估。为了解决这一问题,本文采取形态学滤波中的开处理方法剔除上述虚警。具体地,像素点个数低于一定门限的独立连通区域被当作虚警剔除,对于Radarsat-2数据、高分三号数据I和高分三号数据II,考虑到最小舰船目标所占像素点的大小,上述门限分别取10,50和15。
Radarsat-2数据和两景高分三号数据分别如图5—图7所示,其中图5(a)、图6(a)、图7(a)是Pauli基下RGB伪彩色图,图5(b)、图6(b)、图7(b)是真值图。数据真值由专业人员结合专家知识标注,其中白色代表舰船目标像素点,黑色代表海杂波区域像素点,灰色代表陆地像素点。
4.2 实验结果分析
本文选取传统的SO-CFAR方法[38]、新近提出的迭代CA-CFAR方法[40]和显著性方法[12]作为对比方法,验证本文融合多极化特征和超像素技术的舰船检测方法性能。除此之外,为进一步验证融合多特征方法的性能优势,还选取极化总功率SPAN和优选的3个极化特征,分别单独结合超像素技术作为对比方法。

图5 Radarsat-2数据Fig.5 Radarsat-2 data
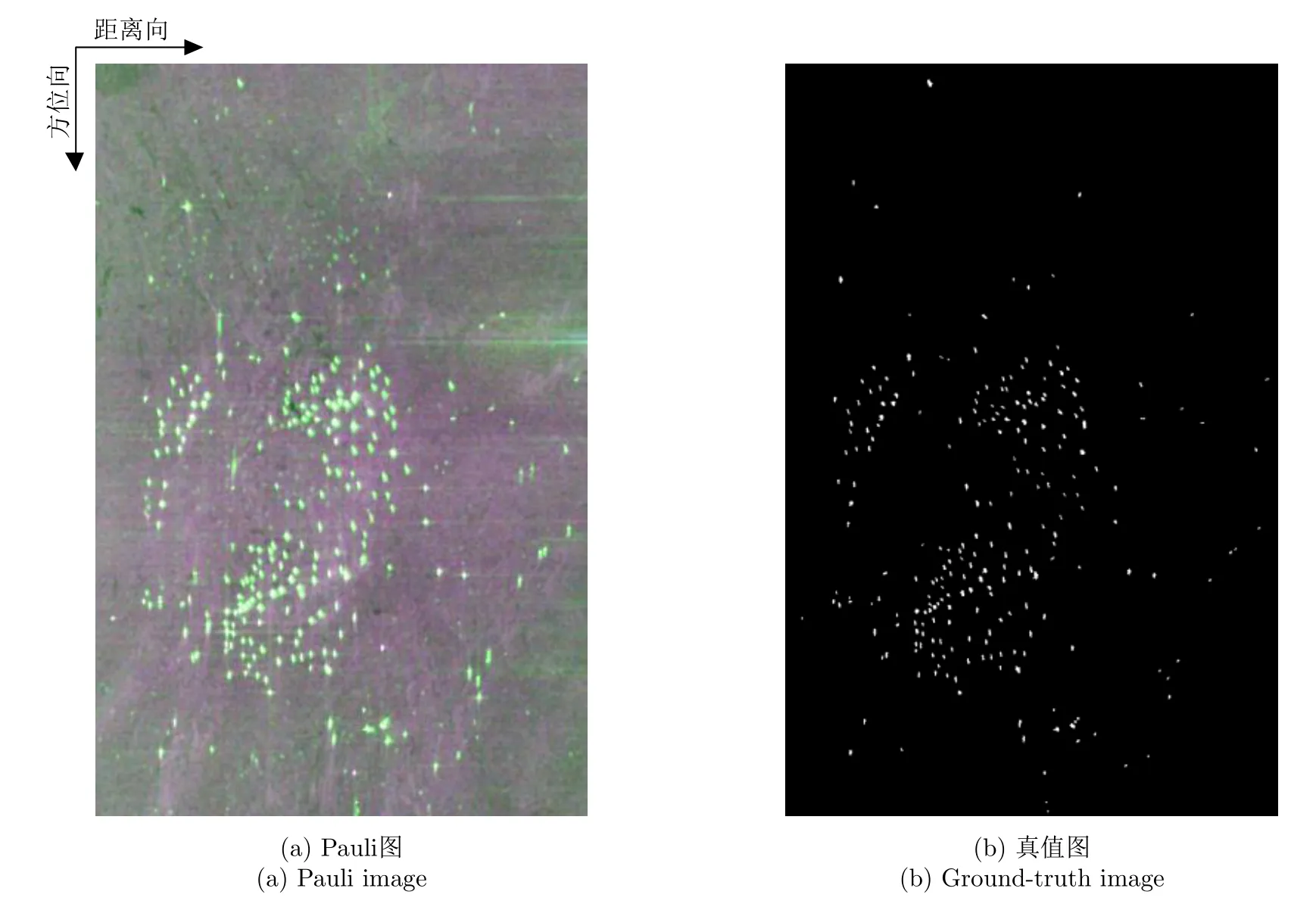
图6 高分三号数据IFig.6 GaoFen-3 data I

图7 高分三号数据IIFig.7 GaoFen-3 data II
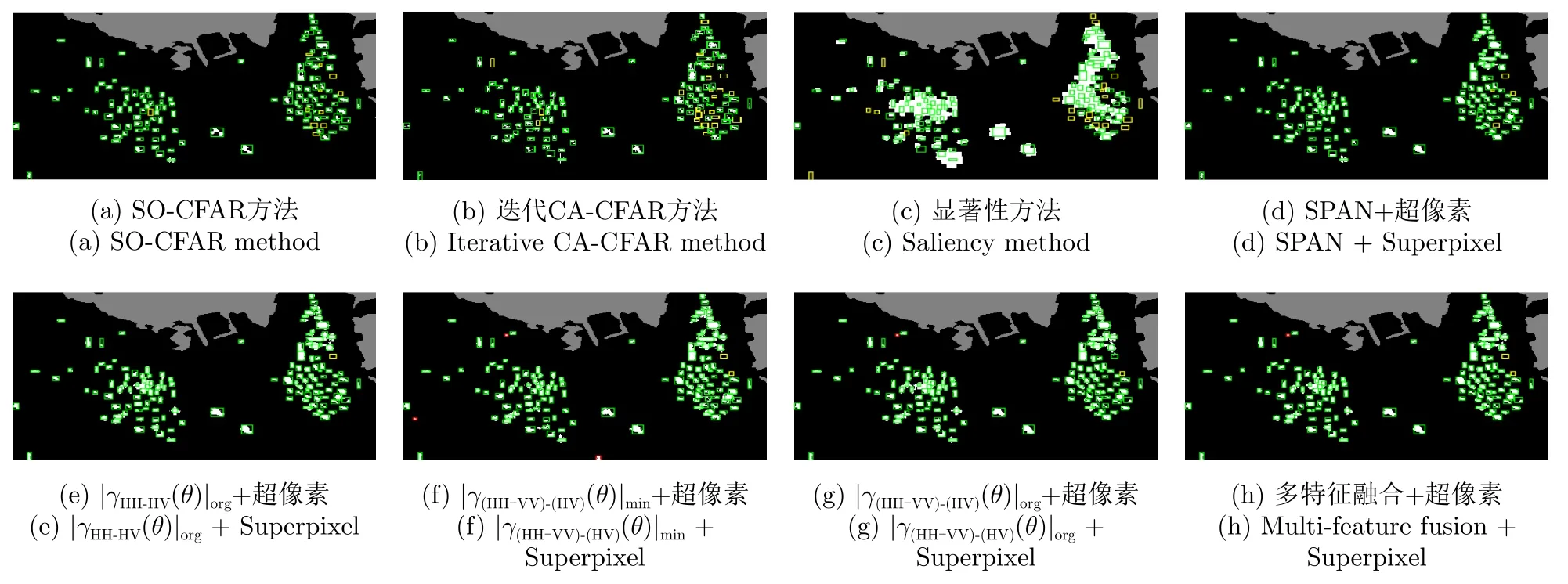
图8 Radarsat-2数据对比方法检测结果Fig.8 Detection results of comparative methods with Radarsat-2 data

图9 高分三号数据I对比方法检测结果Fig.9 Detection results of comparative methods with GaoFen-3 data I
Radarsat-2数据、高分三号数据I、高分三号数据II的检测结果分别如图8—图10所示。其中图8(a)—图8(c)、图9(a)—图9(c)、图10(a)—图10(c)分别是SO-CFAR、迭代CA-CFAR、显著性方法的检测结果,图8(d)—图8(g)、图9(d)—图9(g)、图1 0(d)—图10(g)为SPAN和|γHH-HV(θ)|org,分别单独结合超像素技术的检测结果,图8(h)、图9(h)和图10(h)是融合多极化特征和超像素技术的检测结果。其中红色、绿色、黄色矩形框分别代表虚警、正确检测和漏检。为定量分析检测结果,引入品质因数(Figure of Merit, FoM)[54]
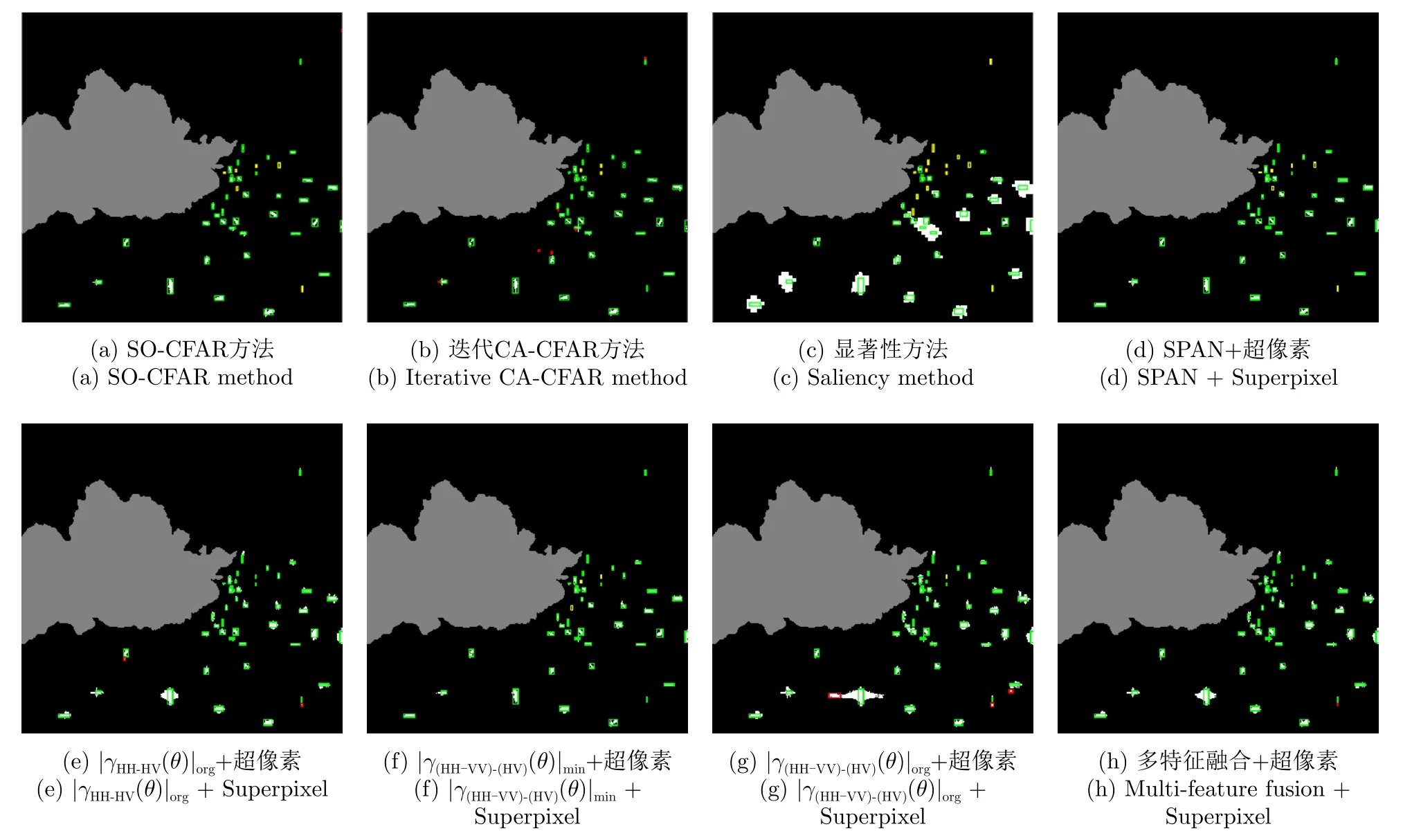
图 10 高分三号数据II对比方法检测结果Fig. 10 Detection results of comparative methods with GaoFen-3 data II

其中,NC,NM和NFA分别代表正确检测、漏检和虚警的个数。Radarsat-2数据、高分三号数据I、高分三号数据II定量的检测结果分别统计在表1—表3。
对于Radarsat-2数据,传统的SO-CFAR方法受密集区域多目标干扰的影响,产生了较多数量的漏检,如图8(a)所示。该方法共有11个漏检,FoM为91.97%。迭代CA-CFAR方法通过迭代选取用于门限估计的杂波像素点,旨在提高密集区域的检测性能,然而受限于CA-CFAR方法[56]的基本框架,在密集区域还存在大量漏检,其漏检数量为23个,FoM是所有方法中性能最低的,只有83.21%,如图8(b)所示。显著性方法基于像素点之间的欧几里得距离和灰度空间距离提取显著性特征,再根据OTSU方法得到全局检测门限[12]。显著性方法的检测结果如图8(c)所示,在目标密集区域存在大面积的目标混叠,无法有效区分舰船目标,且产生了21个漏检,FoM为84.67%。相比于上述3种对比方法,SPAN特征和3个优选的极化旋转域特征能有效提高密集区域的舰船检测性能,漏检数量明显降低,且相对于显著性方法能有效分离密集区域的舰船目标。图8(d)—图8(g)分别为基于单一极化特征SPAN,|和的检测结果,其漏检数量分别是4, 1, 2和1,其中优选的极化旋转域特征的检测结果中只有1个漏检,FoM为99.27%,是所有方法中最高的。考察优选的3个极化旋转域特征和SPAN特征,极化旋转域特征性能优于SPAN特征。本文所提融合多特征和超像素技术的舰船检测方法的检测结果如图8(h)所示,有2个漏检和1个虚警,品质因数为97.83%,优于单特征和SPAN的性能,也远优于SO-CFAR、迭代CACFAR和显著性方法。
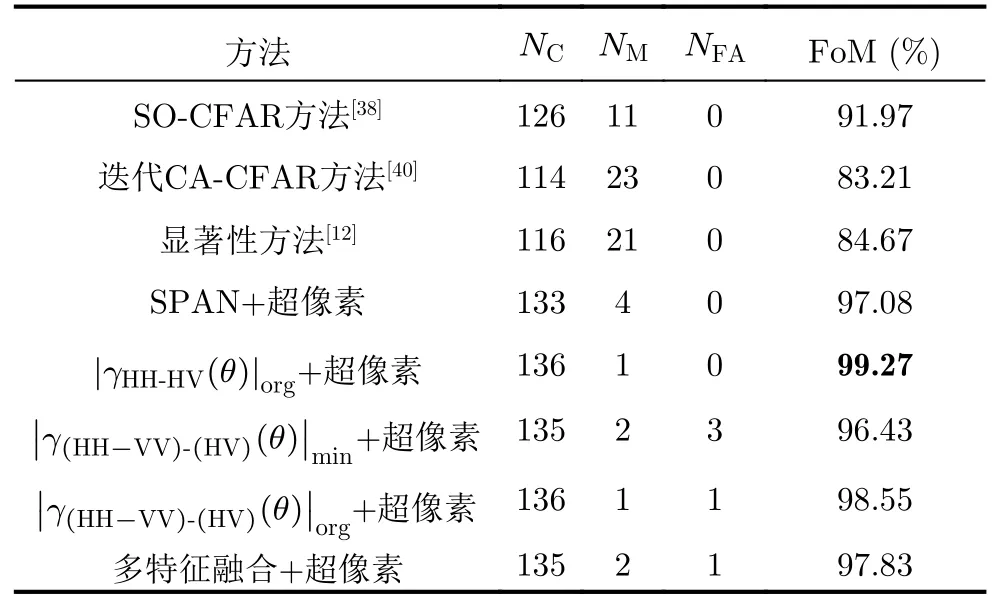
表1 Radarsat-2数据定量检测结果Tab.1 Quantitative detection results of Radarsat-2 data

表2 高分三号数据I定量检测结果Tab.2 Quantitative detection results of GaoFen-3 data I
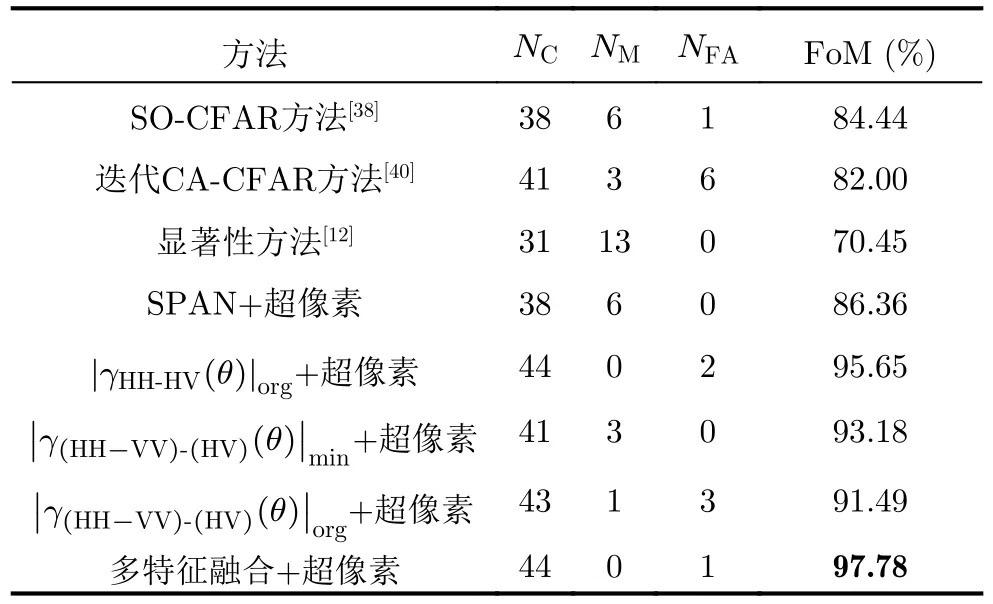
表3 高分三号数据II定量检测结果Tab.3 Quantitative detection results of GaoFen-3 data II
高分三号数据I的检测结果中,迭代CA-CFAR有76个漏检,品质因数为68.60%,是所有方法中性能最低的。SO-CFAR和SPAN特征同样产生了较多数量的漏检,分别是59个和68个,品质因数分别是75.62%和71.90%。与Radarsat-2数据类似,显著性方法在检测结果中产生了一定程度的目标混叠,如图9(c)所示。显著性方法中有27个漏检,相对于SO-CFAR、迭代CA-CFAR和SPAN特征性能有明显的提升,FoM达到88.84%。本文优选的3个极化旋转域特征,其检测结果中漏检数量大大减少,其中仅有1个漏检,同时还有11个虚警,其品质因数是单特征方法中最高的,达到了95.26%。和相比,的漏检数量从1增加到了4,但是虚警数量从11降到了8。从图9(f)和图9(g)来看,和在检测结果中存在互补,即漏检的4个目标中,在中有3个都能被正确检测;产生的11个虚警中,有3个在中能被有效抑制。针对不同极化特征之间存在的互补性,本文提出融合多个极化旋转域特征和超像素技术的检测方法,有望进一步提高舰船检测性能。本文方法的检测结果如图9(h)所示,共有3个漏检和8个虚警。该方法能够有效融合和的性能优势,降低检测结果中的虚警和漏检,品质因数进一步提升到95.60%,是所有方法中性能最好的,验证了融合多特征检测方法的性能优势。
高分三号数据II中,显著性方法的漏检数量最多,达到了13个,FoM是所有方法中最低的,只有70.45%。产生漏检的大多是面积较小的舰船目标,且显著性方法的检测结果中目标混叠的现象严重,在舰船密集区域无法有效区分多个舰船目标。SO-CFAR和迭代CA-CFAR方法的漏检数量大幅减少,分别是6个和3个,但是这两种方法分别有1个和6个虚警,FoM分别是84.44%和82.00%。相比于SO-CFAR、迭代CA-CFAR和显著性方法,基于SPAN特征和极化旋转域特征的检测方法FoM在86%以上,有更高的检测性能。其中,SPAN特征有6个漏检,FoM为86.36%。优选的3个极化旋转域特征相较于SPAN特征性能更好,其中只有2个虚警,FoM达到了95.65%,是单个极化特征检测方法中性能最高的。检测结果中只有3个漏检,其FoM为93.18%。如图10(e)和图10(f)所示,极化旋转域特征有明显的互补性,检测结果中的虚警在中被有效抑制,检测结果中的漏检在中被正确检测,融合多极化特征的检测方法有望进一步提升检测性能。本文所提的融合多极化特征和超像素技术的检测结果如图10(h)所示,该方法有效抑制了检测结果中的1个虚警,并正确检测了检测结果中的3个漏检目标,FoM是所有方法中最高的,达到了97.78%,进一步验证了本文方法的性能优势。
5 结束语
以舰船为代表的海上高价值人造目标检测是极化SAR传感器的重要应用之一。受极化特征优选和邻近多目标干扰的影响,密集区域的舰船检测性能亟待进一步提升。针对这一问题,本文从极化特征提取和极化检测器设计两方面出发,提出一种融合极化旋转域特征和超像素技术的检测方法。在极化特征提取方面,将两极化通道间的极化相关值扩展到绕雷达视线的极化旋转域,由此导出一系列极化相关方向图特征。这些极化特征具有明确的物理意义,可反映舰船目标和海杂波背景不同的散射特性,在目标检测、分类识别等领域具有应用潜力。在检测器设计方面,本文提出一种基于超像素技术的杂波选取方法。利用舰船目标和海杂波背景极化取值差异,基于K均值聚类提取纯净的背景像素点,进一步提高密集区域舰船目标检测性能。对比实验验证了优选极化特征在舰船目标检测中的应用,后续将继续分析极化旋转域特征在其他领域的应用可行性。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:07:10
科学与信息化(2021年30期)2021-12-24 08:00:20
舰船科学技术(2021年12期)2021-03-29 01:28:44
电脑知识与技术(2018年35期)2018-02-27 13:29:44
自动化学报(2017年11期)2017-04-04 02:52:44
舰船科学技术(2016年1期)2016-02-27 15:39:26
西北工业大学学报(2015年3期)2015-12-14 13:08:44
遥测遥控(2015年2期)2015-04-23 08:15:22
电视技术(2014年11期)2014-12-02 02:43:28
现代防御技术(2014年6期)2014-02-28 18:26:39