基于PMAC的超声速风洞控制系统软件开发设计
2021-03-04 13:39王岩,宋放
计算机测量与控制 2021年2期
王 岩,宋 放
(1.沈阳工学院 信息与控制学院,沈阳 113122;2.上海宽睿信息科技有限责任公司,上海 201203)
0 引言
风洞是飞行器研制过程中必要的试验设备,能够人工制造飞行器飞行过程中周围环境的高速气流。对于风洞数据的控制研究对飞行器的制备运行有着重要的作用。根据大数据统计,世界上目前共存在近千座大型风洞,我国目前存在低速风洞50多座,超声速风洞30多座[1]。随着科学技术的不断发展,一些发达国家已经建立完整的风洞试验体系,风洞在飞行器制造的过程中发挥的作用也越来越大,同时,风洞的试验过程中面对的问题也越来越多[2]。
风洞的模拟能力需要极其精准才能够对更加高端的飞行器进行试验,而传统的风力感应控制系统对风洞的模拟数据进行数据采集和处理时,过于依赖硬件设备,只能对低速风洞的试验数据进行有效获取,无法对超声速风洞数据进行精准获取[3]。而在超声速风洞控制系统中,利用PXI系统进行数据获取时,无法向其系统的软件程序中添加监控程序,导致试验过程中安全系数受到限制[4]。
为了解决传统方法中存在的问题,本文基于PMAC对超声速风洞控制系统软件进行设计,应用PMAC的特性对超声速风洞中的相关数据进行精准控制采集,并能够保障风洞试验过程中的安全稳定。
1 基于PMAC的超声速风洞控制操作程序设计
随着计算机技术的不断进步,在超声速风洞控制系统中应用软件程序代替硬件已经成为风洞控制系统的发展趋势,减少系统中的硬件数目,不仅能够降低制造成本,还能够应用多种辅助功能[5-6]。
PMAC运动控制卡是一种可以实现数据控制的人机界面和程序管理共存的软件操作系统,能够在测量周围运动状态下的相关数据,再通过上位机和下位机对控制数据实现通讯任务,最终完成控制操作[7-8]。若应用PMAC技术使超声速风洞的控制系统能够稳定实现,其操作程序的设计需要划分为3个阶段:第一阶段是控制PMAC运动控制卡上的上位机程序,能够使工作人员随时看到人机界面和参数的输入信息等:第二阶段是利用操作程序随时开通上位机与下位机的通讯途径,也能够随时关闭通信途径;第三阶段是实时控制PMAC运动控制卡的监测精准度,根据风洞的环境速度进行定位,再利用PLC程序与控制操作程序相结合,完成风洞控制操作程序的监测与顺序控制[9-10]。
本文开发的PMAC运动控制卡超声速风洞控制操作系统主要在Windows XP平台下运行,通过语言编辑器对平台中的程序进行开发与调试,PMAC运动控制卡操作控制程序自身携带通讯函数与驱动程序,利用XP系统进行程序协调,完成程序内的上位机与通信模型的数据编写,通讯函数可以作为上位机与下位机之间的通讯程序桥梁。开发操控程序的数控模式需要建立Pocomm64PRO函数库,并将函数库中的数据控制程序存入内存中,为人机界面的操控创造便利的控制交互条件。
PMAC运动控制卡的风洞控制操作程序还可以开发为动态操作状态,动态操作状态下的程序开发需要通过程序编写、译码翻译、程序加载、程序连接等手段,此时的PMAC运动控制卡控制人员与风洞试验人员需要利用同一种代码,将这些代码编入到文件夹中,保存在数据控制库中。动态操作程序的目标代码文件可以通过连接器获取程序所需要的代码,提取代码后便可以输入到执行程序中[11]。
PMAC运动控制卡控制操作程序中的主要通信手段为上位机与下位机之间的通讯驱动程序,此程序的实现建立在动态连接程序内,通讯驱动程序中包含64种功能函数对程序代码提供计算和提取服务,用户应用驱动通信程序可以创建一套满足需求的可变量上位机软件,再应用通讯驱动程序获取PMAC运动控制卡中采集的数据与控制的数据进行数据传输工作[12]。上位机与下位机的通讯结构如图1所示。

图1 上位机与下位机的通讯结构图
此控制程序的实时实现是建立在不同的软件程序上,插补算法程序是实现控制程序精准度和切换速度的,根据风洞中的气流速度对飞行器进行加速与减速控制和数据采集控制;伺服控制程序是数控程序的主体,此程序利用插补算法程序的运算结果,对风洞中的气流不同阶段和位置的速度进行监测;还应用PLC启动程序作为控制程序的皮冻开关,风洞运行的开关控制可以通过PLC的行程开关进行逻辑顺序控制[13]。PMAC控制程序中还具有数据初始化功能,满足PMAC对软件配置的数据清理与变量协调,变量的分类表如表1所示。

表1 变量的分类表
2 基于PMAC的超声速风洞控制系统数据采集程序
超声速风洞中的控制系统数据采集程序主要通过PID算法对PMAC进行改进而实现,PID算法中需要具备3个独立的风动参数即可进行计算,参数可以从PMAC的函数储存库中提取,设PID算法的独立参数分别为K、T、B,算法中的输出值为w(t),输入值为Q(t),此算法中的比例关系与微积分关系可以通过以下公式获取:
(1)
式中,d代表时间误差,t代表微积分时间常数。此公式在计算机的控制系统中实现对风洞数据采集的形式为:
(2)
式中,K代表计算机的数据采集序列,t代表控制系统的运行周期。
基于PMAC的超声速风洞控制系统数据采集程序运行的软件程序由参数编辑程序、系统协调程序、数据采集程序、实验程序、学习程序组成。考虑到风洞实验过程中需要具备一定的安全性,程序在启动前需要对启动程序的各类物理按钮与交互页面的信息进行生成与确认,提醒工作人员在安全条件具备的情况下进行数据采集工作[14]。
参数编辑程序是建立在运动传感器上实现的,超声速的总压控制精度与风洞电机的脉冲启动速度都需要依靠运动传感器来监测,而风洞中的风速加减和风洞压力值是参数编辑程序中工作人员手动输入的。数据采集程序是基于PMAC的超声速风洞控制系统数据采集程序的核心程序,采集程序进行中需要首先对风洞中的初始数据进行采集,监测风洞的空气流动状态,将初始状态下的测量数据存入到数据库中,数据采集程序还划分为模拟风洞数据测量、正式风洞试验测量,可以对风洞内的监测点进行控制监测、对故障数据进行诊断、控制风动的开启关闭数据、控制风动气流的角度数据以及监测空洞的实时显示数据。系统学习程序的内容主要为风洞的结构、风洞的技术参数、风洞测控能力、风洞运行流程、风洞故障以及诊断方法,此程序的运用能够有效提升风洞实验人员对风洞的了解和学习,对于风洞数据监测工作有着很大的作用[15]。
本文设计基于PMAC的超声速风洞控制系统数据采集程序的运行界面,利用实验过程,确定程序的主界面。程序界面参数设定页面如图2所示,程序的主界面中分别设定了参数输入值、实验模拟状态、调试工具和学习程序的进入等[16-18]。在程序内输入风洞试验参数后,确定各个设备的工作稳定性方可运行采集程序。

图2 程序界面参数设定图
3 基于PMAC的超声速风洞控制系统风洞监控程序开发
PMAC运动控制卡中的上位机与下位机通讯程序读取通讯数据是实时和监测过程中的各类程序稳定运行时,需要在基于PMAC的超声速风洞控制系统风洞监控程序的监测下顺序动作,此程序发现试验过程中出现不稳定因素时可以立即向下位机传输控制指令,阻止故障状态的继续动作[19]。
在基于PMAC的超声速风洞控制系统风洞监控程序的开发中,本文应用集成软件对计算机中的软件资源进行统一配置,在程序的控制下其他软件程序可以自行执行相应的工作。本文选用Fame View组态软件作为此程序的运行基础,程序在软件平台中性能稳定、速度快、监测空间大,在监测控制方面包含了西门子与三菱公司的软件开发平台,减少了驱动程序的硬性需求。此程序的开发具有以下特点:监测核心稳定,采用C++语言编写,能够在Windows系统运行,基于64位运行版本,保障监测数据的保密性。此程序还有利于PLC的多线程连接,可以大量地对风洞故障内容判别处理,利用PLC的判断能力制定了设备数据库与程序数据库[20]。
本程序的开发设计了20个模拟监测点,包含一个流量点、10个气流点、9个气压点。模拟实验过程中的监测内容可以通过数字方式处理,在设备数据库中从低字节到高字节依次保存数据,实际的监测过程需要采用更高字节的处理手段:
y=k×UI(x,x2)+b
(3)
式中,k代表监测的数据变量,UI代表设备数据库的储存量,b代表字节的大小。当监测点遇见双字节的数据时,为了能够更加精准地实现程序内容,采用相应的双字节处理手段:
y=k×UI(x,x2,x3,x4)+b
(4)
式中,x3、x4为双字节的监测控制预留更多的协调空间。通过上式,实现监测过程的数据保存,保证超声速风洞控制系统风洞监控程序稳定运行。
通过上述分析,得到基于PMAC的超声速风洞控制系统风洞监控程序流程如图3所示。
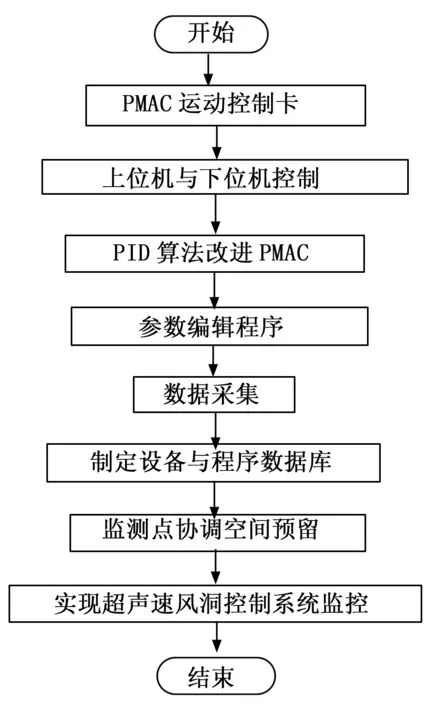
图3 风洞监控程序流程
如图3所示,在风动监测程序中,首先引入PMAC运动控制卡,测量周围运动状态下的相关数据,通过上位机和下位机实现控制数据之间的通讯,引入PID算法改进PMAC运动控制卡,实现参数编辑程序的设计,对控制数据进行采集,制定设备数据库及程序数据库,通过更高字节的处理手段预留监测点协调空间,实现风洞监控程序的设计。
4 实验结果与分析
传统的风力感应控制系统应用于飞行器的超声速风洞试验过程中对速度数据的采集无法达到精准的效果,过度地依赖硬件设备性能,本文采用设计开发软件程序对超声速风洞中的数据进行精准采集,将设计软件程序实现数据安全方面的监测控制,并以传统的PXI系统作为实验对照组,通过对比结果证明本文设计程序的稳定可靠性。
实验过程中首先检查软件系统的试验程序能否被设计的子系统接受,常规性地测试风洞中的力调节,启动相关的子系统,输入超声速风洞中能够承受的最大压力值,若数据采集程序能够稳定地采集到相关数据则可以进行风洞试验。其次再应用本文程序监测风洞中的气流压力值,启动相关子程序,向系统内输入试验模式与试验数据,实验过程中需正确读取控制参数,利用PMAC运动控制卡交替控制飞行器与风洞气流之间的运动数据并进行记录储存;再通过数据采控程序对超声速度进行采控,运行步骤与气流压力值的采控相同;最终还要观察监测程序的数据情况,查询是否存在异常数据或不匹配状态,能够第一时间找出试验隐患,预防安全事件的发生。
实验流程如图4所示。
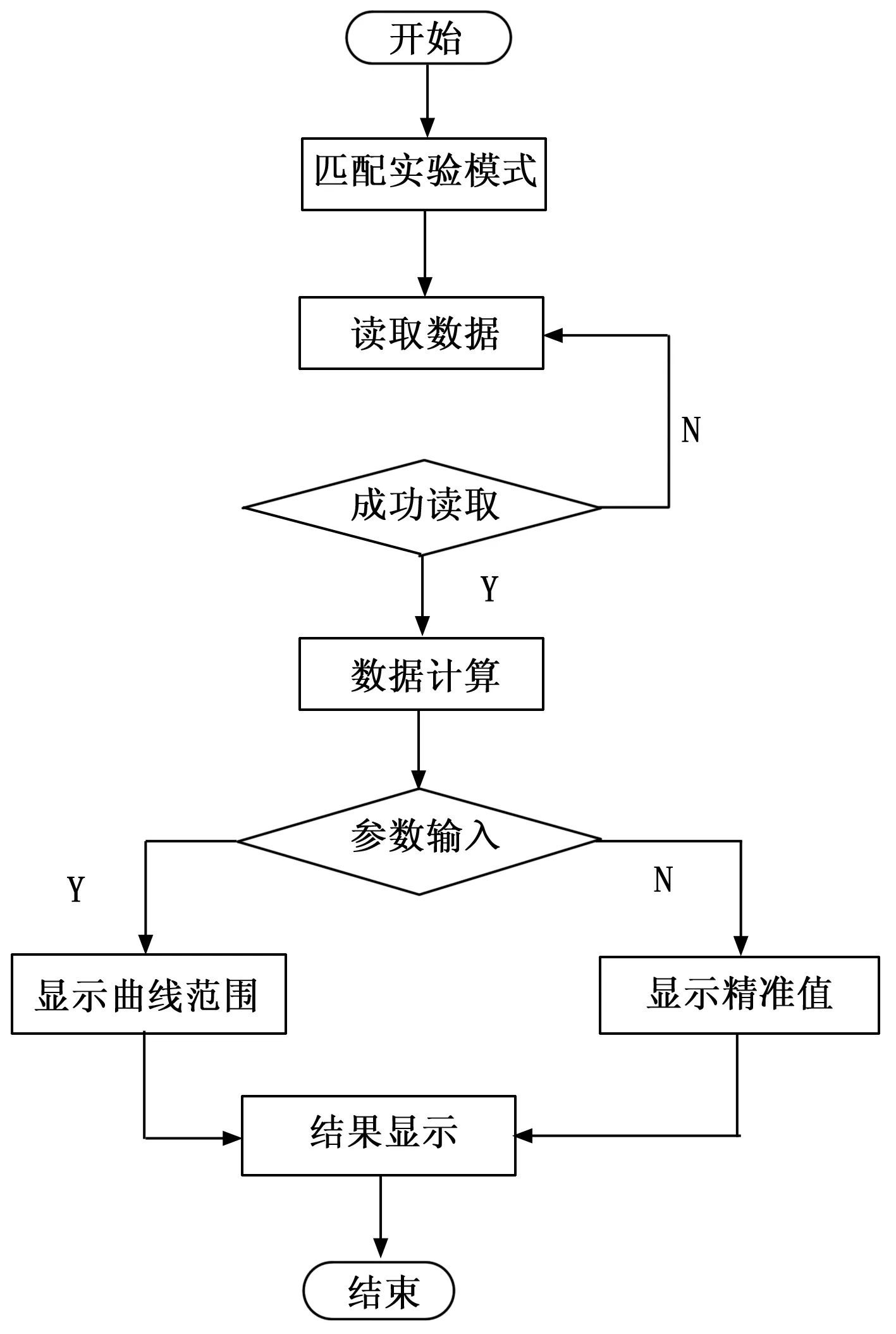
图4 实验流程图
试验在真实环境中进行,采用的硬件工控机处理器为i8,8G内存,通讯网络为风洞内部互联网;软件采用的操作系统为Windows XP,程序运行平台为Lab 2018。实验中将本文程序下的实验结果与传统的风力感应控制系统的实验数据进行比较,通过对比本文程序中对风洞气流的采集精准度与传统方法下的采集精准度,验证本文程序的精准性,实验对比如图5所示。
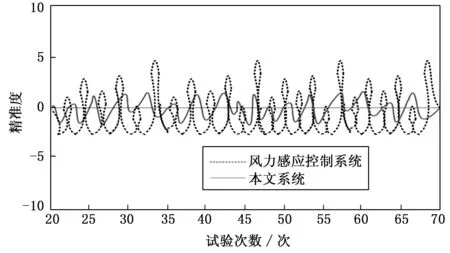
图5 本文程序与风力感应控制系统精准度对比图
根据图中内容可知,本文程序能够更加精准地采集超声速风洞的数据,本文程序应用PMAC运动控制卡对实现上位机与下位机之间的高效率通讯,保障了数据传输的快速性,在常规传感器的基础上再引用PIA算法对风洞实时运动数据进行有效运算,获取更加精准的数值。而传统的风力感应系统只通过感应器对数据进行采集上传,获取的数据灵敏性和精准度都处于较低水平。本文实验还对本文程序与传统的PXI系统的安全信息监测功能状态进行对比,验证本文程序的安全可靠性能。实验对比如图6所示。

图6 安全监测范围对比图
如图6所示,本文程序能够对风洞试验过程中的全部数据进行有效监测,覆盖范围广泛,平均值在15 MB左右,而传统的软件系统虽然能够精准地获取试验数据,但是对于安全监测数据功能有着较大的缺陷,且波动幅度较大,无法全方面地保障试验安全运行。本文程序运用PLC多线程控制数据的传输,还利用20个监测点对风洞各个位置的相关数据进行监测,能够实现无死角的安全监测。
5 结束语
本文基于PMAC对超声速风洞控制系统软件开发设计,分析了超声速风洞在传统的软件系统下的试验情况与普通风洞在传统软件系统下的试验情况,根据当前的科技手段与飞行器的制造产业,本文设计开发更加适应未来发展趋势的软件程序。分别对软件系统的PMAC控制程序、数据采集程序、安全监测程序进行设计,最终应用对比实验验证本文程序的可靠稳定性。
猜你喜欢
汽车工程学报(2022年3期)2022-06-10
军民两用技术与产品(2022年2期)2022-06-01
凤凰动漫(军事大王)(2022年1期)2022-04-19
兵器知识(2021年11期)2021-11-27
军事文摘(2020年8期)2020-08-12
环球飞行(2020年11期)2020-01-11
智族GQ(2019年9期)2019-10-28
数学大王·中高年级(2018年11期)2018-12-17
汽车观察(2015年10期)2016-04-06
现代电子技术(2009年6期)2009-05-31