
液压双吊点闸门启闭同步控制方法研究
2021-03-03 09:44金丛成韩友春
中国水能及电气化 2021年1期
金丛成 韩友春
(江苏禹衡工程质量检测有限公司,江苏 盐城 224000)
水利工程分为防洪工程、农田水利工程、水力发电工程以及供水和排水工程等,与其他工程相比,水利工程具有影响面广、规模庞大、工期较长的特点。水利工程中安装的闸门,启闭一般采用双吊点启闭机实现,然而双吊点同步误差过大,会导致水利工程闸门的卡阻、侧水封的磨损、闸门漏水以及门槽轨道的变形等缺陷,间接地影响启闭机的正常工作,甚至会引起灾难性的水利工程事故。
根据控制方式不同,可将闸门启闭机控制分为手动控制、集中控制和现地控制三种方式,其中,集中控制是在泄水闸集控室内,检测闸门的启闭状态,并结合水力环境现状调节闸门的开度大小,这种控制方式是最常用的闸门控制方式之一,而现地控制是在调试和集中控制失效时采用的控制方式。现阶段国内外通过长时间的研究得出的研究成果包括基于PLC的控制方法、基于模糊理论的控制方法以及基于Modbus的控制方法,然而当前闸门启闭机控制方法对同步性的要求较高,上述传统的控制方法存在严重的同步误差问题。为了解决这一问题,在传统控制方法基础上,分析控制方法同步误差的形成原因,并结合分析结果实现对双吊点闸门启闭机同步控制方法的优化设计。在运行过程中产生同步误差的原因分别为双缸偏载和双缸液压的不对称,因此,本文以解决液压双吊点闸门启闭机控制方法的同步误差为目的,实现对同步控制方法的优化设计。
1 双吊点闸门启闭机同步控制方法设计
双吊点闸门启闭机主轴上安装一个码盘,当启闭机转动时,码盘的读数与主轴转角成正比,在忽略钢丝绳弹性变形量的情况下,码盘中显示的数据与闸门的开度之间存在一个函数关系。将该函数关系编写成程序代码,控制、调整启闭机状态。同步控制方法的实现原理见图1。

图1 双吊点闸门启闭机同步控制原理
从图1可以看出,此次同步控制方法的实现需要借助控制器与传感器等硬件设备的配合,并通过相关硬件设备检测启闭机左右两吊点的移动程度,若两吊点的移动程度一致可以确定控制过程中未出现同步误差问题,否则可以认定两侧运动存在滞后关系,并能够得出同步运动的超差大小、相位等信息。将同步误差的分析与计算结果代入到控制器中,并调整控制器的控制方式,通过控制单元进行相关的逻辑和数学处理,便可以实现对双吊点闸门启闭机控制工作中同步误差的校正,从而实现对闸门启闭机同步起吊。
1.1 液压双吊点闸门启闭原理
同步数学模型构建的目的是了解双吊点闸门启闭机的一般结构和工作原理。闸门实际控制运行中,根据工程任务需要下达闸门的升、降指令,启闭机液压油泵经由不同的液压阀组在油缸内形成压力,引起液压杆在缸内做反复的伸展和缩回运动,对闸门产生推拉作用,为闸门的升降操作提供动力。将启闭机的液压缸通过双吊头与闸门连接在一起,达到启闭闸门的目的,这也就是双吊点闸门启闭机的工作原理。
1.2 监测水利工程水位
液压双吊点闸门启闭机的控制执行命令由闸前水位来决定,若闸前水位超过了安全水位线,则需要进行开闸泄洪,即启闭机需要执行提升操作,若监测出闸前水位处于安全区域,则闸门恢复封闭状态,启闭机执行降落任务,并将闸门复位。由此可见,要实现对启闭机的控制任务,首先需要监测水闸实时水位变化情况。此次主要借助水位传感器进行研究。设备的设计结构见图2。
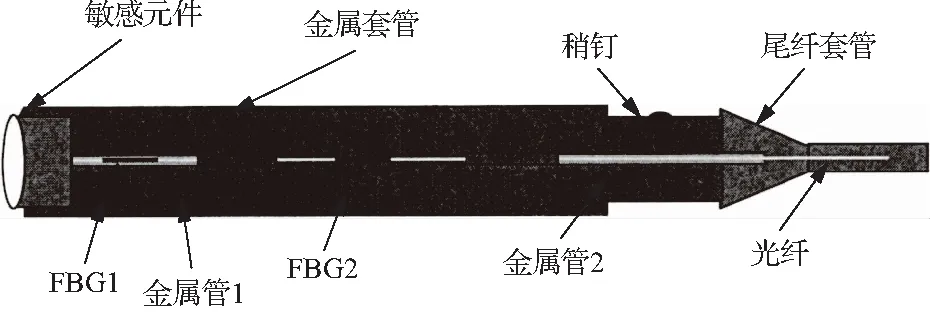
图2 水位传感器结构
在实际水位监测工作中以传感器中的敏感元件为分析基准面,通过材料的合理选择和结构的合理设计使得下式成立:
L0α0=(L1+L2)α1
(1)
式中L0、L1和L2——传感器中三个金属套管的长度;
α0和αi——热胀冷缩系数。
将设计的水位传感器垂直放置到水利工程的水中,由于水的存在会使敏感元件发生形变,通过金属管1将产生的形变量传递给应变传感器光栅,从而改变其有效折射率,从而导致传感器的中心反射波长发生偏移。传感器的机械设计使用自收揽装置,摒弃传统浮子水位计配有重锤的结构设计,水位传感器采样方式是根据浮子随水位的变化,利用浮子、钢丝绳和卷簧的作用力带动码盘的转动进行水位采集。通过测量波长的偏移量即可以得出相应的液压值,结合液压与变形之间的对应关系,便可以的得出水位值,并通过传感器设备传输到主控设备上。由于设计的水位传感器需要长时间浸泡在水面以下,为了保证水位监测结果的精度,传感器主要构成材料均为防水材料。水位传感器性能参数按照表1中数据设置。
1.3 计算闸门启闭机载荷
一般来讲双吊点闸门启闭机所承受的荷载包括自身荷载、起升荷载、水平惯性荷载和外界环境荷载。荷载与实际荷载之间的关系如图3所示。

图3 闭机载荷结构图
图3中Q为自重荷载,计算公式如下:
Q=Mg
(2)
式中M——双吊点闸门、启闭机所有结构的总质量;
g——重力加速度。
图3中FV为起升荷载,也就是起升质量的重力,闸门在无约束的情况下被提升离开原位,存在一个起升动力效应,也就是起升荷载,该参数的计算公式如下
FV=n2Pq
(3)
其中
n2=n2min+χ2vq
(4)
式中n2——起升动载系数;
n2min——起升状态级别的起升动载系数的最小值;
χ2、vq——按照起升状态级别设定的系数和稳定起升的速度;
Pq——额定起升荷载。
图3中FG为水平惯性荷载,就是在水平面内进行纵向或横向操作时,启闭机自身重量与闸门质量的水平惯性力的综合,其计算公式如下:
FG=φ1(Mq+Mc)a
(5)
式中Mq、Mc——额定起重量和闸门重量;
φ1——启闭机驱动加/减速动载系数;
a——启闭机的加/减速度。
另外外界环境因素包括风力、水力等,在计算过程中存在较大的不确定因素,在此次控制方法的分析中未予考虑。
1.4 确定启闭机实时开度
结合实时水位监测结果以及闸门启闭机的荷载情况,可计算出当前闸门需要的开放程度,也就是启闭机开度值,记为D1。接着检测当前启闭机的开度值,记为D2,判断D1和D2的大小,从而确定启闭机的开度调整值,开度调整值的确定过程如下:
(6)
当D1大于D2时,启闭机执行下降操作,若D1小于D2则启闭机执行提升操作,若D1与D2的值相等,则启闭机不执行任何操作。
1.5 实现双吊点闸门启闭机同步控制
设计并安装启闭机的同步控制器,并利用该设备实现对双吊点闸门启闭机的同步控制,并缩小同步控制误差。图4所示为安装的控制器结构。

图4 双吊点闸门启闭机控制器结构
双吊点闸门启闭机的控制可从启闭机运行状态和运行速度两个方面进行,其中,启闭机运行状态可以分为提升状态和下降状态,结合启闭机实时开度的判断结果,在启闭机运行时每个吊点上的控制器将不间断地测量其偏差。在左右差值不小于20mm的情况下,自主上电对有杆腔输入、输出油量进行校准调整,保证闸门两侧位置达到一致。而启闭机运行速度主要通过调速阀中流量进行控制,调速阀中流量中的连续性控制方程可表示为
(7)
式中q3、q4和q5——在控制器作用下调速阀出口、节流阀出口和调速阀进口的流量;
V3、V4——调速阀出口到主动液压缸有杆腔之间以及减压阀阀腔之间的体积。
将速度以及状态的控制程序导入设计并安装的控制器中,在控制器的作用下实现对双吊点闸门启闭机的同步控制。
2 对比实验分析
为测试双吊点闸门启闭机同步控制方法的控制效果,以设置双吊点闸门启闭机的同步误差为测试指标进行对比实验,并将设计的方法应用到实际的水闸运行管理中,保证实验结果的可信度。
2.1 水闸工程概况
此次选择江苏省内的盐城市串场河伍佑闸进行实验。该水闸为中型水闸,建设的主要目的是防洪排涝,同时兼有通航、灌溉的功能。该闸于2013年建设完成,在2018年经历一次加固,并与2019年年末完成。加固完成后的水闸包含一个通航孔和四个分洪孔,两个类型的闸孔净宽分别为16m和12m,水闸的总宽度为72.3m。
2.2 实验对象
在整个水闸工程中包括多个闸门,按照上游、下游的顺序对闸门进行编号,统计各个闸门启闭机的主要性能参数(见表1)。

表1 双吊点闸门启闭机主要性能参数
除表1中的启闭机基本性能指标外,还需要对控制过程中所需要使用的设备进行配置。开度仪情况见表2。

表2 开度仪型号及运行数据
2.3 设置实验初始数据与目标数据
实验前首先需要设置双吊点闸门启闭机的初始数据与目标数据,在实验中分别执行2次启门操作和2次闭门操作,并记录未应用任何控制方法下的运行数据,也就是初始同步误差数据。第1次启门操作产生的同步误差见图5。
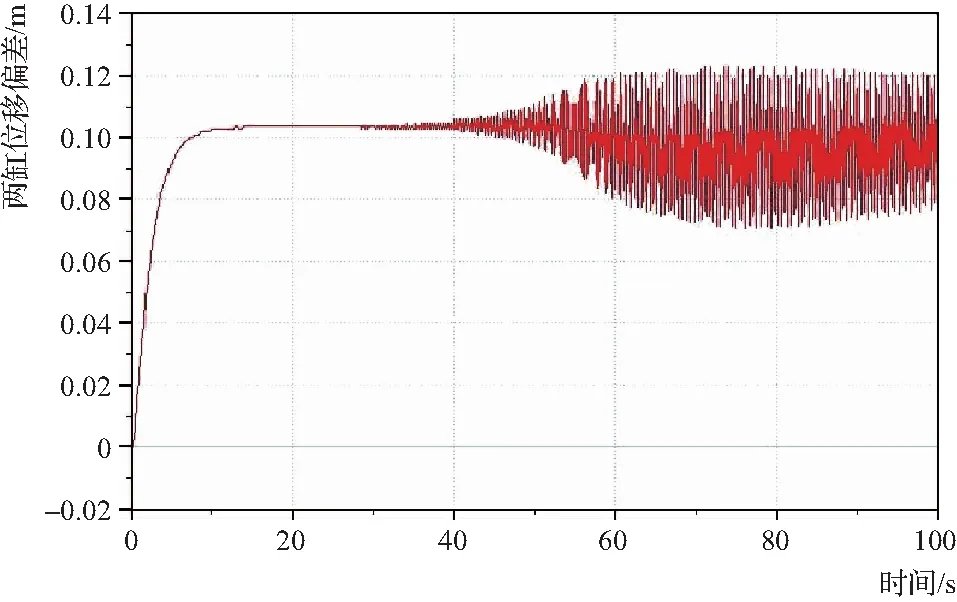
图5 初始启门同步偏差曲线
同理可以得出其他操作过程中产生的初始同步偏差。双吊点闸门启闭机同步控制的最终目的是实现双吊点之间的同步偏差为零。
2.4 实验对比结果分析
为了形成实验对比,除了设计同步控制方法外,还设置了传统的控制方法以及文献[1]中提出的基于PLC的双吊点液压启闭机同步控制方法作为实验的两种对比方法。将三种控制方法导入控制器或主控计算机中,并用到水利工程中,分别得出对应的同步控制结果。应用设计控制方法得出的开度曲线见图6。
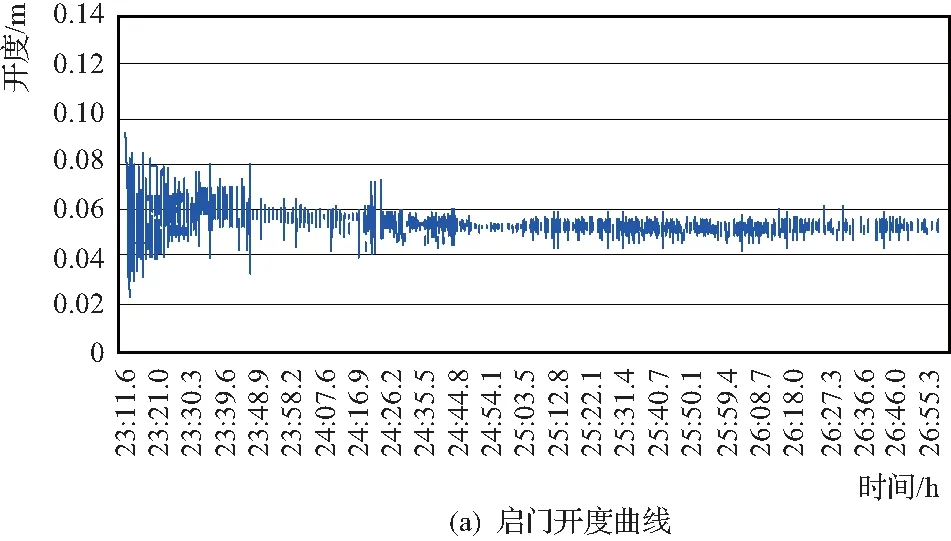
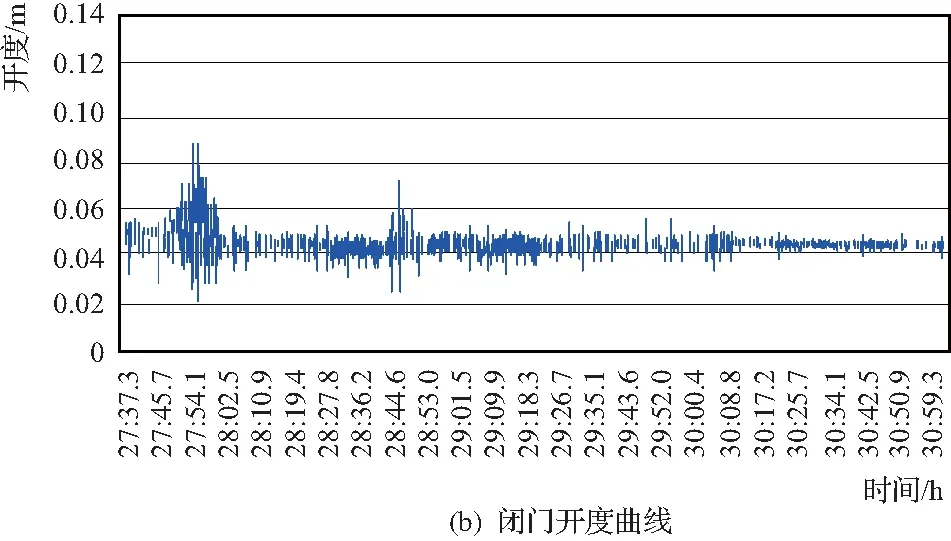
图6 双吊点闸门启闭机同步控制结果
从图6中可以看出,双吊点闸门在开启和关闭过程中左右两缸位移偏差逐步趋于稳定,波动幅度逐渐减小,由此证明设计控制方法的同步偏差控制效果较好。同理可以得出另两种控制方法下的实验结果,并得出最终的控制效果对比结果(见表3)。

表3 对比实验结果
从表4可以看出,应用传统控制方法以及文献[1]提出的控制方法对应的平均同步误差分别为2.0和1.0,而应用设计的控制方法能够将同步误差控制在0.5以下,由此证明设计的水利工程双吊点闸门启闭机同步控制方法的控制效果和应用性能更佳。
3 结 语
此次控制方法研究,主要对液压双吊点闸门启闭机在运行过程中存在的同步偏差情况进行了分析,并利用控制方法确保双吊点同步运行,从而大大提高双吊点闸门同步启闭精度。然而在此次控制方法的设计与实现工作中,忽略了外界环境对启闭机运行带来的影响,从实验结果中可看出,应用控制方法后还存在微小的偏差,因此,在未来的研究工作中需要针对这一问题进一步优化与分析。
猜你喜欢
石油和化工设备(2022年1期)2022-02-22
湖南水利水电(2021年6期)2022-01-18
中国修船(2017年4期)2017-08-17
制造技术与机床(2017年2期)2017-05-04
中国水利(2015年4期)2015-02-28
中国水利(2015年2期)2015-02-28
舰船科学技术(2015年8期)2015-02-27
航天返回与遥感(2014年5期)2014-07-31
中国水利(2013年1期)2013-10-25
船海工程(2013年1期)2013-06-12
