雷达小样本目标识别方法及应用分析
2021-03-02 05:36:24孙晶明于俊朋
系统工程与电子技术 2021年3期
晏 媛,孙 俊,孙晶明,于俊朋
(1.南京电子技术研究所,江苏 南京 210039;2.中国电子科技集团公司智能感知技术重点实验室,江苏 南京 2100039)
0 引 言
雷达目标识别技术不受天气、光照等诸多条件影响,能够及时准确地提供场景中每个实体目标的详细属性信息,具有较高的军用和民用价值。但实际应用场景的时效性约束和资源限制导致该领域一直存在小样本问题,这严重制约了雷达目标识别技术的发展[1]。虽然传统雷达目标识别技术对数据的需求量较小,但人工提取特征的方式导致该类算法环境适应性差且工程推广能力低[2]。深度学习技术依靠其优秀的自动特征提取能力,大幅提升了雷达目标识别的准确率[3-4],但其对大数据的需求依旧制约着模型性能的发挥[5-6]。因此,如何提升深度学习技术在雷达小样本目标识别应用中的性能成为亟需解决的问题,也是本文的研究重点。
目前小样本学习问题在光学图像识别领域的研究最为广泛,主要研究机器学习模型面对新类少量样本的快速学习能力,代表方法是元学习和迁移学习[7]。元学习要求系统通过观察机器学习方法在不同任务中的学习过程,积累经验以实现新任务的快速学习[8]。元学习方法可分为3类:基于度量的元学习[9-12]、基于模型的元学习[13-14]和基于优化的元学习[15-16]。其中基于度量的元学习方法由于强解释性和优越的识别性能而备受关注。不同于元学习,迁移学习的核心思想是从相关领域迁移标注数据或知识结构用于改进目标领域或任务的学习效果,根据可迁移的内容分为4类:模型迁移、特征迁移、样本迁移和关系迁移[17]。其中模型迁移方法能够降低小样本模型的训练难度,加速网络学习,因此在小样本学习领域也得到了一定的应用[18-21]。文献[20]将元学习方法与模型迁移相结合后算法性能明显优于普通元学习方法。
综上可以看出,小样本学习问题在光学领域已经取得了一定的研究成果。相较于光学领域,雷达领域的小样本目标识别问题研究十分有限[22-26]。文献[22-24]分别改进原型网络等光学领域小样本学习模型,提升雷达小样本目标识别性能,但实验场景均设置简单,无法满足复杂的实际应用需求,同时模型性能优势验证不明确。文献[25]迁移光电域知识以提升雷达图像域的小样本目标分类性能,但其未考虑目标任务数据的难获取问题,同样未结合雷达实际应用场景。
针对以上问题,本文通过探究元学习和迁移学习这两类最主流的小样本学习方法,提出了一套综合解决方案用于处理实际工程应用中的雷达小样本目标识别问题。该方案使用了具有强表示性的特征提取模块,且能够针对不同的应用场景选择合适的模型学习方式和分类方式,因此能够最大程度发挥模型优势,展现优越的识别性能。同时本文基于雷达实测数据集,对元学习和迁移学习在不同实际应用背景下的模型性能进行深入挖掘,进一步验证了所提出方案的有效性和可行性。
1 小样本学习相关理论
小样本学习问题的核心关注点在于研究模型的快速学习能力,目前研究者们通过提升数据利用率解决此类问题,主要从元学习和迁移学习两个角度出发进行研究。
1.1 元学习
元学习通过学习多个任务的识别过程积累经验,从而面对全新的目标任务时只需要少量样本就能够实现快速学习[8]。其中元训练和元测试阶段的算法思路相同,具体流程如下。
步骤 1确定目标任务。假设全新的待识别目标包括K个类别,目标任务为仅通过学习每类目标的M个样本,就能实现对全新K类目标的正确分类。
步骤 2从数据集中随机采样K类目标,每类N个样本作为一个元任务数据集。
步骤 3从元任务数据集的每类样本中随机采样M张样本作为支撑集Ss,其余各类的N-M张样本作为查询集Qs。
步骤 4模型学习支撑集样本,并对查询集样本类别进行预测。
步骤 5最小化查询集样本的损失函数实现分类模型的训练。
算法需要重复迭代步骤2至步骤5,这在元训练阶段能够帮助模型实现更充分的经验积累,也能在元测试时通过目标任务识别结果的反复验证更准确地判断模型性能。同时,元测试阶段模型不需要重新调整便可以直接学习分类。
综上可以看出,算法流程中元任务与目标任务的数据学习形式相同,这种模拟目标任务的模型训练方式能够很好地提升模型的泛化能力。同时,多任务训练机制能够帮助模型学习元任务的共性特征,如学习样本相似性比较等,而忽略任务针对性强的部分,因此在面对新的目标任务时能够发挥较好的性能。
1.2 迁移学习
迁移学习中的模型迁移方法因其高效性在深度学习图像识别领域受到广泛关注,通过知识迁移提升模型学习效率,具体算法流程如下。
步骤 1在源任务上对模型进行预训练。
步骤 2迁移预训练模型的部分或全部结构作为目标任务模型的浅层模块,并冻结该部分模型权重参数和网络结构。
步骤 3通过目标任务的学习对模型的非冻结部分进行微调完成模型训练。
模型迁移方法之所以有效,是因为深度学习通常使用神经网络提取样本特征向量,而神经网络浅层部分权值是具有强适应性的共性知识。因此,当源任务与目标任务存在一定相关性时,模型迁移能够实现知识积累,从而降低训练难度,提高模型学习效率。
2 小样本识别综合解决方案
本文提出了一套结合元学习和迁移学习的综合方案用于解决雷达小样本目标识别问题。该方案能够根据实际应用场景选取合适的模型学习方式和分类方式,实现目标任务的快速学习。图1体现了本文所提出方案的整体思路。
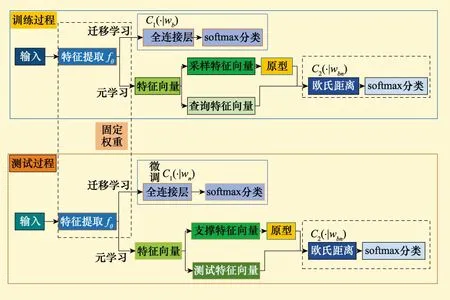
图1 小样本识别综合解决方案Fig.1 Comprehensive solution for few shot recognition
算法首先通过模块fθ进行样本的特征提取,并根据实际需求选择后续合适的模型学习方式。首先,当应用场景源任务信息量缺乏或源任务与目标任务间差异性大时,算法选择模型的上支路,即迁移学习方式。其遵循模型迁移的学习流程,迁移预训练模型的特征提取模块并训练新的分类模块C1(·|Wn)。迁移学习的知识积累优势一定程度上解决了源任务信息量缺乏的问题。同时,微调机制能够较好地克服任务间的差异,使模型更好地适配于目标任务。其次,若源任务信息量充足或源任务与目标任务间差异性小时,算法选择模型下支路即元学习方式进行小样本识别。其按照元学习流程采样获得支撑特征向量和查询特征向量,并通过比较查询特征向量和支撑特征向量原型之间的欧氏距离,使用分类模块C2(·|Wbn)进行查询特征向量的分类。元学习的多任务训练机制能够帮助模型更好地处理新的目标任务,同时训练过程中对目标任务环境的模拟也很好地提高了模型的泛化能力。因此,本文所提方案通过在不同应用情境下选择不同支路能够最大限度地发挥模型优势,提升雷达小样本目标识别的效率和准确率。本文的实验结果验证了所提方案的有效性和可行性。
下面重点介绍本文提出的综合方案中的3个关键模块:特征提取模块,元学习支路和迁移学习支路。
2.1 强表示性的特征提取结构
小样本学习方法通常采用的特征提取结构为4层卷积神经网络[11-12],该网络易于训练,但结构简单,学习能力有限。因此,本文提出使用残差网络进行特征提取。该网络能在避免过拟合和退化问题的情况下保证网络学习能力,尽可能拟合复杂的雷达目标特征提取过程,从而提升目标识别的准确率。
残差网络由残差块构成,如图2(b)所示为一个残差块,其与普通卷积模块的区别在于通过快捷连接在神经网络前向传播时跳过一层或多层连接实现了恒等映射。恒等映射的引入保证了层数加深后的模型性能永远优于等于模型较浅时的性能。

图2 恒等映射图示Fig.2 Diagram of identity mapping
本文使用3个残差块堆叠构建了一个10层的残差网络,如图3所示。每个残差块内包含3层卷积模块,每个卷积模块包含卷积层、批归一化层和激活层。

图3 特征提取器的网络结构Fig.3 Network structure of feature extractor
2.2 欧式距离度量的元学习
原型网络作为元学习的代表模型由于性能优越而备受关注,因此本文的元学习支路也将借鉴原型网络的学习方式,实现模型的高效识别。
元学习支路的数据学习方式与经典元学习方法相同,均模拟目标任务进行学习。模型的整体思路参见图1中的元学习支路,其具体思想如图4所示。

图4 原型网络算法思路Fig.4 Prototypical network algorithm thinking
图4(a)体现了每类支撑特征向量通过累加求均值获得每类支撑样本的原型ck,计算公式为
(1)
式中,Sk表示第k类目标的支撑特征向量集,|Sk|表示第k类目标支撑特征向量集的向量数量;(xi,yi)表示支撑特征向量集Sk中的各个向量,xi表示单个支撑特征向量,yi表示该支撑特征向量的标签信息。
图4(b)则体现了单个查询特征向量通过求解与每类原型的欧氏距离来获得其类别概率分布,表达式为
(2)

(3)
最终模型的损失函数如下:
J(θ)=-lnpθ(y=k|x)
(4)
元学习支路模型鲁棒性强,泛化能力好,且相似性度量的使用强调类内聚集性和类间疏远性,提升模型的学习效率。
2.3 微调分类模块的迁移学习
模型迁移在深度学习领域应用较为广泛,但将其与小样本学习结合的研究较少,在雷达小样本学习问题中的性能表现也常被低估。因此,本文引入模型迁移方法作为方案的迁移学习支路解决雷达小样本目标识别问题。
小样本迁移学习的流程如图5所示,源任务的训练过程与传统模型迁移方法相同。在目标任务模型训练过程中,本文采用与元学习相同的数据学习方式,对数据集进行小批量采样以形成目标任务数据集。目标任务数据集包含少量的支撑集样本ds和查询集样本dt。面对各个目标任务时,模型均通过学习少量的支撑集样本进行模型微调,创建新的分类器C1(·|Wn)实现查询集样本的识别。模型每完成一个目标任务就会对分类模块重新初始化以避免经验记忆问题,从而保证模型每次面对的目标任务都是全新的。本文通过多次小批量采样并不断初始化的方式反复验证了模型在目标任务的表现性能。

图5 小样本迁移学习Fig.5 Few shot transfer learning
模型通过最小化标准交叉熵分类损失函数完成训练。函数表达式为
(5)

迁移学习支路通过改进数据学习方式将模型迁移用于小样本学习问题,不仅提高了模型训练效率,还能帮助模型实现更好的适应性学习。
3 实验结果与分析
为验证本文所提综合解决方案的可行性,本节对方案的两条支路算法元学习和迁移学习进行多组对比试验,为方案的最优选择支路提供依据。
3.1 实验数据集
本文基于DARPA/AFRL提供的MSTAR数据集完成实验。该数据集由Sandia国家实验室使用的X波段合成孔径雷达(synthetic apeture radar,SAR)传感器收集。其中包括十类地面军用车辆,即自行榴弹炮2S1、装甲侦察车BRDM2、装甲运输车BTR60、BTR70(SN_C71)、推土机D7、坦克T62、T72(SN_132)、货运卡车ZIL131、自行高炮ZSU234、履带式步兵战车BMP-2(SN_9563)[9-11]。其中2S1,ZSU234和BTR70涉及15°,17°,30°和45°的4个姿态角。其余目标仅涉及15°和17°姿态角。目标类型及样本数量等详细信息如表1所示。其中,第3.3.1节和第3.3.2节实验均使用数据集中的BTR70(SN_C71),BTR60,D7,T62,ZIL131,BMP2(SN_9563),T72(SN_132)这七类样本作为源数据,使用2S1,BRDM2和ZSU234作为目标任务数据。

表1 MSTAR数据集Table 1 MSTAR dataset
3.2 实验设置
迁移学习实验中使用源任务数据集进行模型预训练,并按照3:1获取训练样本和验证样本。训练时批处理量为15,共训练200次。目标任务微调过程中的数据学习方式与元学习相同,均采用3way-5shot模式,每次实验需从数据集中随机取3类目标,每类20张样本作为此次任务数据集,该数据集中随机取5张为支撑集样本,其余15张为查询集样本。元学习的训练过程需要重复采样训练10 000次,迁移学习和元学习的测试过程均需要重复6 000次后取测试结果平均值作为最终的识别结果。
实验采用Adam优化器,初始学习率为1e-3。
3.3 分组实验结果与分析
小样本识别应用通常关注两个问题:一是指定目标任务时源任务信息量的选取问题;二是源任务与目标任务间的差异性问题。为更高效地完成以识别为目的的雷达成像,需分析小样本识别算法所关注的显著性特征。本文针对这3个问题,在第3.3.1节、第3.3.2节和第3.3.3节分别进行探索,设置不同的应用场景,探索模型性能并最终形成了几条可有效指导雷达小样本目标识别的工程应用结论,同时为雷达成像提供指导建议。
3.3.1 源任务信息量实验
本节探索当目标任务确定时,源任务信息量变化对模型性能的影响。本文通过改变源任务样本类别数体现源任务信息量的变化。共设置5组实验,每组实验分别从源数据中随机选择3类、4类、5类、6类和7类目标作为源任务数据集样本。涉及目标均只考虑15°和17°姿态角,训练样本和测试样本数量均为400。
图6展示了当目标任务类别数为3的情况下,对于元学习来说,当源任务样本类别由3类增加到5类时,识别率增加了21.4%,在这之后识别率提升幅度变小。峰值出现在源任务类别数为6类时,为95.4%。对于迁移学习来说,平均样本识别率为82.78%。源任务类别数为4时,识别率达到峰值为83.1%。
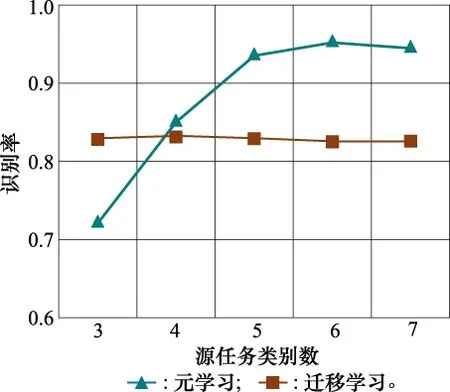
图6 小样本识别率与源任务类别数变化关系Fig.6 Change relationship between few shot recognition rate and the number of source task categories
从实验结果可以看出,当目标任务确定时,随着源任务样本类别数的增加,元学习性能有较大提升,迁移学习性能受影响很小。首先,因为元学习模型关注不同类别之间的信息,源任务目标类别数的增多会使得模型经验积累更加丰富最终帮助提高模型识别率。但由于目标任务简单,源任务信息增加到一定程度后出现信息冗余状况。其次,对于迁移学习来说,虽然总样本量增加,但其每类样本量不变,而样本类别数的增加导致目标类间差异性变弱,模型的特征提取能力没有得到增强,因此随着类别数增加迁移学习没有得到提升。
由此给出两点工程应用建议:第一,当源任务样本类别数缺乏时,采用迁移学习可取得较好结果;第二,当源任务样本类别数充分时,采用元学习可取得较好的模型识别性能。
3.3.2 样本差异性实验
本节探索样本差异性变化对模型性能的影响,主要从源任务样本与目标任务样本间的差异性和目标任务样本的类内差异性两个角度考虑。雷达SAR图像成像过程中,目标外形特征受姿态角影响较大,因此实验使用姿态角差异性表示样本差异性,设置了11组对比实验进行探索。具体实验设置及实验结果如表2所示。

表2 样本差异性实验数据设置与实验结果Table 2 Experimental data setting and experimental results of sample difference
针对源任务与目标任务间的差异性影响,从a~d和e~h实验绘制的折线图(见图7)可以看出随着目标任务样本与源任务样本间的差异性不断增大,元学习和迁移学习识别性能均下降。图7(a)展示了源任务姿态角为15°时,随着源任务与目标任务间姿态角差异性增大,元学习识别率由97.3%降到了75.26%,下降了22.04%。而迁移学习识别率由84.9%下降到74.1%,下降了10.8%。二者的差距从12.4%缩小到1.16%。图7(b)展示了源任务姿态角为15°和17°时,随着任务差异性的增大,模型性能变化趋势与图7(a)相同。当目标任务姿态角达45°且与源任务差异性达到最大时,元学习模型识别率相较于迁移学习低3.2%。
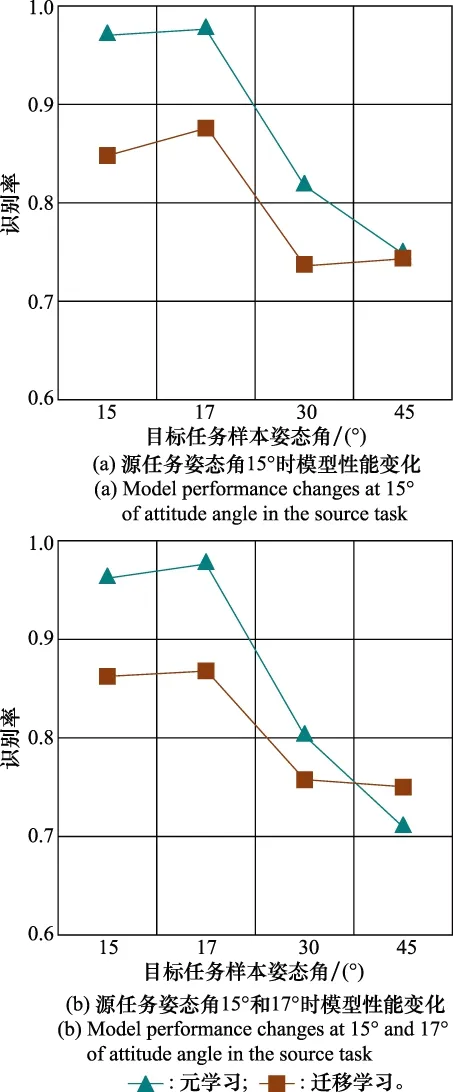
图7 小样本识别率与任务差异性关系Fig.7 Relationship between few shot recognition rate and task difference
当任务差异性增大时,元学习和迁移学习性能均有明显下降。但二者受影响程度不同,元学习的波动幅度更大,迁移学习波动幅度相对较小。因此,随着源任务与目标任务间差异性增大,元学习的优势逐渐消失,迁移学习性能优势凸显。当任务差异性增大到一定程度后,迁移学习性能将优于元学习性能。这一性能优势主要得益于微调学习,迁移学习通过对目标任务的适应性学习获取了良好的识别性能。
在针对目标任务样本类内差异性实验中,为避免任务间差异性影响,本文根据e~k的实验结果分开对比并绘制了图8。从图8(a)可以看出,元学习中,姿态角混合后的i识别率为94.7%,而单个姿态角e和f的识别率分别为96.7%和97.7%。姿态角混合后的i识别率低于单个姿态角识别率均值的2.5%。迁移学习中,姿态角混合后的i识别率为81.6%,而单个姿态角e和f的识别率分别为86.2%和86.8%。姿态角混合后识别率较单个姿态角识别率的均值下降了4.9%。图8(b)和图8(c)与图8(a)的整体变化趋势相同,姿态角混合后的模型性能均差于单个姿态角下的性能。因此,可以得出结论,随着目标任务样本类内差异性的增大,迁移学习和元学习识别性能均呈下降趋势,这说明类内差异性对小样本学习模型的性能影响较大。

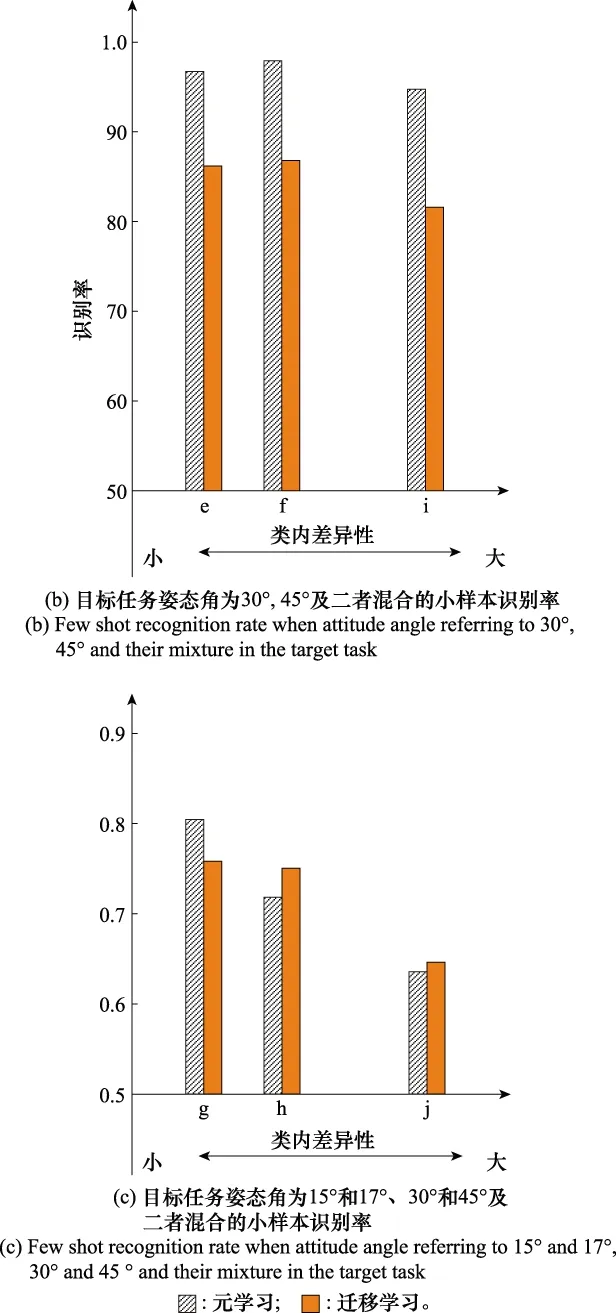
图8 小样本识别率与类内差异性关系Fig.8 Relationship between few shot recognition rate and intra class difference
由此本文建议在实际工程应用时,当源任务与目标任务之间差异性小时,应使用元学习解决雷达目标小样本识别问题,当二者差异较大时应使用迁移学习;当样本类内差异性大时,现有的迁移学习和元学习方法均无法保证良好的识别性能,应寻求适用于解决类内差异性的模型进行解决。
3.3.3 显著性特征提取实验
本节探究小样本学习模型的显著性特征提取问题,从而为以目标识别为目的的雷达成像提供建议。对于地面雷达军事目标,其外在的履带特征和炮管特征较为显著。因此,本文根据有无炮管特征和有无履带特征对MSTAR数据集内的10类目标样本进行归类,归类结果如图9所示。

图9 炮管特征和履带特征归类结果 Fig.9 Categorization results of barrel characteristics and track characteristics
在实验探究过程中,根据有无履带特征和有无炮管特征分别设置源任务和目标任务,并将源任务与目标任务交换形成4组对比试验。实验具体设置及结果如表3所示,实验涉及目标均只考虑15°和17°姿态角情况。对表3的实验结果分析可知,对于元学习,源任务是否学习炮管特征对目标任务识别率影响较小,仅相差1.4%;但源任务是否学习履带特征对目标任务识别率影响较大,学习履带特征的模型性能较未学习履带特征的模型性能提高了7.9%。对于迁移学习,源任务是否学习炮管特征和履带特征对目标任务识别率影响均较大,分别相差17.9%和9.6%。

表3 显著性特征提取实验数据设置与实验结果Table 3 Experimental data setting and experimental results of salient feature extraction
而小样本学习方法为提高模型泛化性能,通常会学习泛化性好的共性特征,结合表3的实验结果分析可知,元学习模型对履带特征敏感而对炮管特征不敏感,说明履带特征为元学习模型关注的共性特征,而模型并未关注炮管特征这种非显著性特征。因此,在元学习方法下履带特征是应该被重点关注的显著性特征。而迁移学习性能受炮管特征和履带特征的影响均较大,说明迁移学习同时学习了这两个特征。
所以,本文建议在进行以目标识别为目的的雷达成像时,应该重点关注显著性特征部位的成像质量。在使用元学习方法进行小样本目标识别时,其雷达成像过程应该重视车辆履带部位的成像质量,保证此处的成像效果;而炮管部位的成像质量不必过分关注。如此不仅能够提高雷达目标成像效率,减少成像成本,还能够提升模型识别性能。
4 结 论
针对雷达小样本目标识别问题,本文结合元学习和迁移学习,提出了一套综合解决方案,使用具有强表示学习能力的残差网络作为特征提取模块,并结合实际需求分成元学习和迁移学习两条处理分支。该方案能够依据实际应用场景的不同,提供最恰当的小样本学习算法,最大限度发挥模型优势,从而大大提升了雷达小样本目标识别的效率和准确率。同时,本文通过多组完备实验挖掘了小样本学习方法在实际雷达目标识别场景下的模型性能,探索了元学习和迁移学习方法的实际应用条件,进一步验证了所提方案的有效性和可行性,并获得5点能够指导实际工程应用的重要结论:① 元学习性能优越的前提为源任务样本量充足以及源任务与目标任务之间差异性较小,否则迁移学习性能表现更好;② 当目标任务确定时,源任务信息量(本文主要指源任务样本类别数)的变化对迁移学习影响较小,但对元学习影响较大,随着源任务样本类别数的增加,元学习模型性能大幅提升;③ 源任务与目标任务间差异性的增大将导致元学习和迁移学习模型性能变差,但元学习性能波动更大,而迁移学习模型性能表现更为稳定,这得益于迁移学习的微调学习机制;④ 小样本学习算法对雷达目标不同外在特征的关注度存在差异,因此以目标识别为目的的雷达成像应重点关注模型需求的显著性特征。⑤ 元学习和迁移学习的小样本识别性能均受目标样本类内差异性影响较大,这是未来工作中需重点考虑的问题,将在下一步工作进行深入分析研究。
猜你喜欢
大自然探索(2023年7期)2023-08-15 00:48:21
计算机工程(2020年3期)2020-03-19 12:24:50
中国听力语言康复科学杂志(2019年3期)2019-06-24 09:51:20
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:24
电子制作(2018年19期)2018-11-14 02:37:08
中国交通信息化(2018年3期)2018-06-13 03:27:58
自动化学报(2017年11期)2017-04-04 02:52:58
中国交通信息化(2016年2期)2016-06-06 07:28:02
火控雷达技术(2016年3期)2016-02-06 02:30:26
百科探秘·航空航天(2015年4期)2015-11-07 07:04:34