无人机倾斜摄影在油气管道建设中的应用探索
2021-03-02 11:29:12刘奎荣周剑琴杨国晖
石油工程建设 2021年1期
刘奎荣,周剑琴,杨国晖
国家管网集团西南管道有限责任公司,四川成都 610000
随着科技的发展,数字化和信息化技术广泛应用于各个学科领域。通过遥感卫星获得地面影像数据,经过计算机分析处理以及网络传输实现数据的交互共享,建设数字地球,它可以让人们更加快捷有效地获取、存储并处理相关信息,同时也促进了社会、经济的不断进步[1]。数字油气管道以基础设施信息为基础,以空间地理信息为支撑,是数字地球的一个重要组成部分,也是当下的一个研究热点[2-5]。
目前,国内外已经有不少学者对数字化油气管道建设方法进行了研究,其中GPS-RTK作为一种成熟的实时动态差分测量技术[6-8],被广泛应用于油气管道建设中[9],该方法极大提高了勘测精度和工作效率,且受天气情况影响较小,能够实现实时测量,是油气管道勘测和施工作业方法研究中一个重要的里程碑。然而在使用GPS-RTK测量技术进行油气管道周边数据采集时,对测量区域的信号要求较高,针对信号较差的区域,数据采集工作较为困难;该方法测得的结果只能显示为二维地形图,在油气管道建设工作中,无法提供直观的地形、地物、地貌信息。
为解决上述问题,本文引入了无人机倾斜摄影测量技术[10-11],利用其机动灵活、高效快速、精细准确、作业成本低、适用范围广、生产周期短且对测量区域无信号要求等特点,获取测区影像数据,并生成三维实景模型,其成果在达到实际测量精度要求的同时,也更直观地展示了油气管道路由区域地形、地物、地貌信息。
1 基于无人机倾斜摄影测量的油气管道建设
1.1 无人机倾斜摄影测量概述
无人机倾斜摄影测量作为一种创新型技术,利用立体三维空间模式进行测量并建模,具有很高的应用价值。无人机倾斜摄影测量最大的特点是能够搭载多个传感器进行影像采集,从不同方向拍摄影像,该技术按照4个倾斜方位以及竖直方向的观测来提供地表影像信息,以增强地表信息的真实度[12-15]。此外,无人机倾斜摄影测量能够自动生成三维数字模型,可以有效反映出人们的感知状态,所以该技术被广泛应用到了数字城市、工程建筑等诸多领域。
1.2 无人机倾斜摄影测量航高改进
传统的无人机倾斜摄影测量技术采用固定航高的无人机搭载传感器,这种方法在高程变化比较缓慢的区域能够保证影像分辨率的变化幅度限制在一定的阈值内,不会影响后续的三维建模工作。但由于油气管道建设区域一般高程落差较大,使用常规固定航高的无人机搭载传感器进行数据采集会导致影像分辨率变化幅度较大,影响三维模型精度。为解决以上问题,在进行航飞数据采集时,使用带有自动跟随地形调整航高的无人机,这样既保证了测区范围内无人机能保持相对航高一致,也保证了航片的分辨率精度一致,进而保证了生成三维模型精度的一致性。
1.3 基于无人机倾斜摄影测量的油气管道建设方法
由于航测的最终建模成果要用于土方量计算,所以对高程的精度要求很高,而传统的单镜头无人机高程精度较低,无法满足土方量的计算要求,故本文采用倾斜摄影测量的方式,用五镜头无人机进行航飞测量。
基于无人机倾斜摄影测量的油气管道建设方法:首先,需要确定测区范围的地理概况来规划航线,并基于规划航线布设像控点;其次,综合考虑模型精度要求以及现场无人机作业安全情况,设定相应的航高、航向重叠率以及旁向重叠率;再次,获取测区影像数据,同时在测区采用GPS-RTK作业方式采集检查点和地形点;最后,将获取的影像数据导入到Smart3D软件中,自动构建测区的正射影像和三维实景模型,并与通过GPS-RTK作业方式采集的检查点和地形点进行对比分析。其具体流程如图1所示。

图1 基于无人机倾斜摄影测量的油气管道建设方法
此外,本文采用的无人机摄影系统自带PPK(Postprocessed Kinematic)动态后处理功能,在获取数据时,在测区现场架设GNSS(Global Navigation Satellite System) 基站进行同步数据采集,通过内业处理,可以将无人机的平面位置精度提高到厘米级,以减少无人机对像控点的依赖。
2 实验结果与分析
2.1 数据处理环境
本文对获取的影像进行数据处理时,所用的计算机配置如表1所示。实验拍摄航片共1 990张,空中三角测量所用的时间为5 h,三维实景建模所用的时间为15 h。

表1 计算机配置规格
2.2 测区概况
本文选取的航飞区域长约2000m、宽约500m、总面积约1 km2,如图2所示。图中红点位置即为无人机的起飞点,红色线路即为管道埋设线路。整个测区高差为200 m,坡度为25%,地面起伏较大,基于此,采用带有自动跟随地形调整航高功能的无人机,以保证测区范围内无人机能够保持一定的相对航高,进而保证航片分辨率的一致性和生成的三维模型精度的一致性。
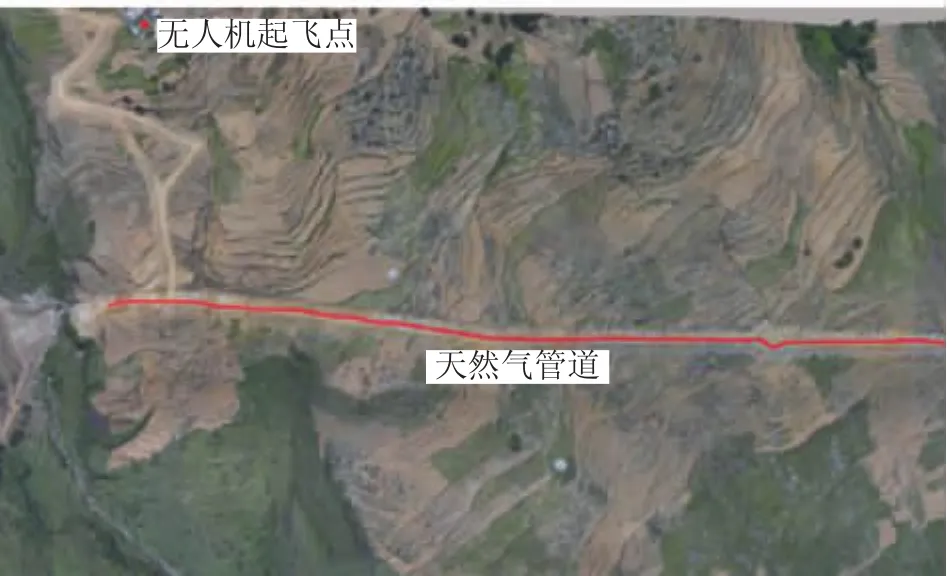
图2 测区概况
2.3 数据获取
由于项目规定的控制点离测区较远,故本次测试坐标系统采用国家2000坐标系,高程系统采用独立高程系统,中央子午线经度为105°,投影面高度确定为1 500 m。本次航摄,无人机采用旋翼机,搭载5镜头进行倾斜摄影。为了保证三维实景建模成果达到精度要求,且保障无人机在测区范围内的安全运行,经过综合考虑,设定相对航高为200 m、航片航向重叠率为80%、旁向重叠率为65%、影像分辨率约为3 cm。同时,像控点和检查点的坐标采用GNSS RTK接入千寻CORS系统测得,精度在20 mm之内,可为无人机倾斜摄影测量三维建模成果的精度分析工作提供参考依据,以验证本文方法的有效性。
本次航飞主要区域为长600 m左右的管道施工作业带,像控点主要布设在其左右,共计布设9个像控点[16-17],其位置如图3所示,图中黄色空心圆点即为本次航测像控点。像控点采用正规1 m×1 m的航测像控标靶布(见图4)。像控点测量采用千寻CORS流动站方式进行,9个像控点的坐标数据见表2。

表2 像控点坐标

图3 像控点布置位置

图4 像控点采集
本次航飞无人机采用旋翼飞机(见图5),通过飞行控制软件,按照预设飞行区域和航线飞行,用时24 min,共拍摄航片1 990张。同时通过在地面架设GNSS基准站采集静态数据(见图6),以便内业PPK解算,并通过CORS在铺设管道区域采集检查点和地形点(如图7所示)。

图5 航测无人机

图6 地面GNSS基站

图7 检查点采集
2.4 基于无人机倾斜摄影测量的三维实景建模成果
本次航测共获得实验数据影像1 990张,通过Smart3D三维建模软件进行内业处理与建模[18-19],设置好软件参数后,可直接生成实景三维模型(见图8)。生成的实景三维模型可在Acute 3Dviewer中进行浏览、距离量测、面积量测、体积量测等操作(见图9),还可以将其导入到第三方软件进行二次编辑和应用。

图8 生成的实景三维模型

图9 模型浏览示意
2.5 模型精度分析
经过摄影测量技术的不断发展,其平面测量精度普遍都能达到厘米级,所以本文主要是对模型的高程精度进行验证分析,精度验证工作主要是和RTK采集的测试点和地形点进行对比分析。
(1)将三维实景模型和RTK采集的测试点进行对比,本次实验外业共采集了5个测试点(见图10),在同一平面坐标下进行高程对比,结果见表3:测试点1在距离管道50 m处,模型高程和测试点相差0.02 m;测试点2在水泥墩坎角上的最高点,模型高程和测试点相差0.02 m;测试点3在水池角点,模型高程和测试点相差0.05 m;测试点4在水泥墩坎角上最高点,模型高程和测试点相差0.03 m;测试点5在土路路面上的点,模型高程和测试点相差0.03 m。

表3 测试点高程对比
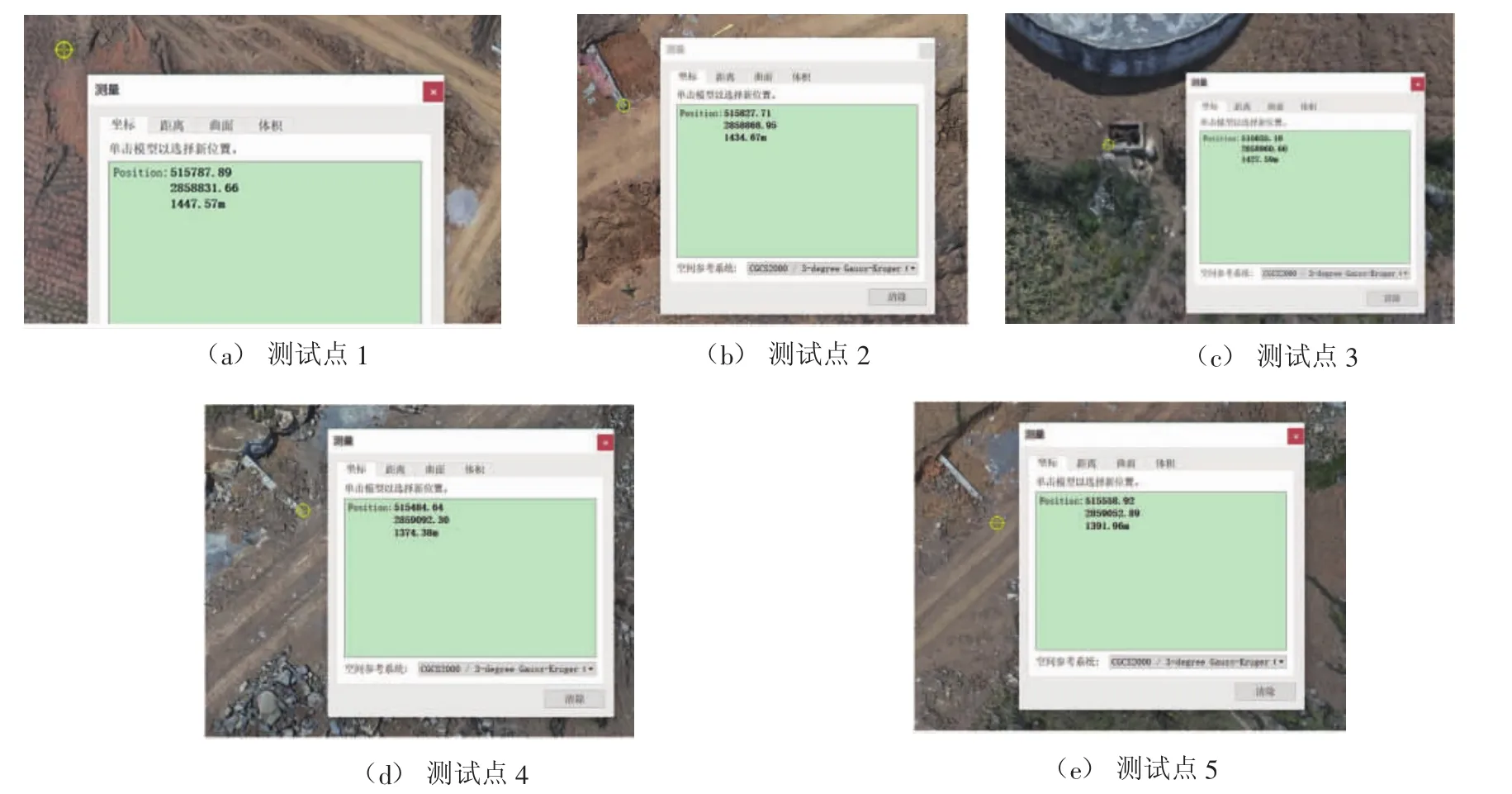
图10 RTK测试点
(2)将实景三维模型和RTK采集的地形点进行对比,由于地形点采集较多,本文选取了14个特征比较明显的地形点进行对比分析(见图11),分析结果见表4。由于无人机航测高程精度一般为影像分辨率的2~3倍左右,此次航摄影像的分辨率约为3 cm,可推算高程精度需控制在10 cm左右(即高差阈值)。

图11 部分RTK地形点
从表3、表4的高程差数据可以看出:本次航摄的高程差最大值为0.08 m,小于阈值,可以判定通过本文方法获得的三维实景模型能够达到实际测量精度要求,证明了本文方法的可行性。
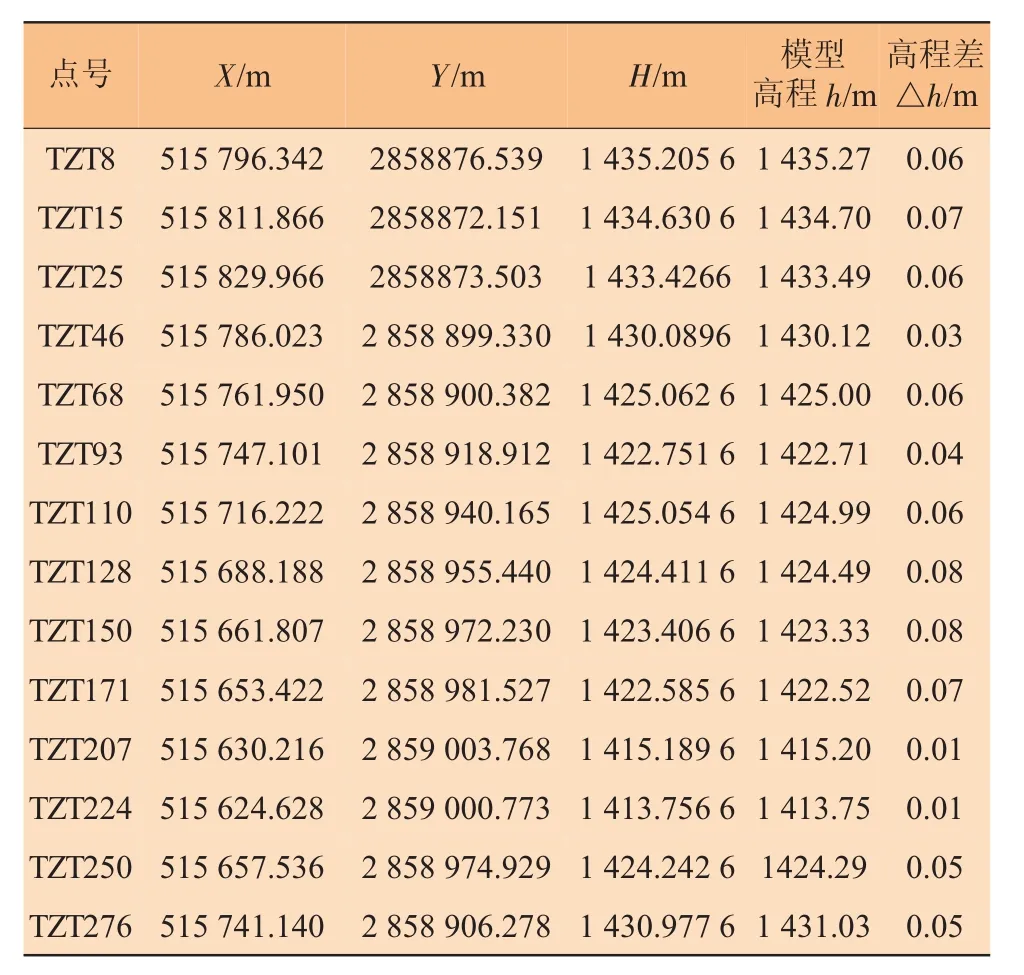
表4 地形点高程对比
3 三维实景模型成果应用
本文方法所生成的三维实景模型具有直观性、灵敏性、便捷性和实用性的特征,可将本文成果应用到诸多工作中去。
3.1 现场施工
本文的三维实景模型成果可为现场的施工进度平台提供实景模型数据,通过航测手段获取的带有真实色彩的现场三维模型可供设计和施工参考使用,为施工进度平台提供基础数据,以进行施工进度管理和二次开发,实现数据的共享和交互,提高现场施工效率。
3.2 管道工程建设
本文的三维实景模型成果可应用到管道工程建设土石方工程量计算工作中去。因倾斜摄影测量保证了较高的高程精度,并以点云的方式计算土方量,所以即使有偏差,其精度也远高于基于传统的方格网测量方法,且更高效。利用本文方法,在1 km2的待测区,只需一个架次20 min的航拍,经过15 h的数据处理即可生成模型,当天进行航飞,最快当天即可出模型成果。所以在进行土方量变化计算时,在挖填土石方前后分别进行一次航测就可算出土方量的准确变化值,方便、快捷且高效。
3.3 作为工程外协赔付依据
本文三维实景模型成果中对地面附着物、构筑物、建筑物的清点,可为工程外协赔付提供支持。在200 m航高下,航摄影像分辨率约为3 cm,而一般情况下,影像上物体覆盖2~3个像素点时肉眼就能准确识别,故可以对模型上直径大于6 cm的目标物(如果树、路灯等)进行清点和统计,作为工程外协赔付的依据。
3.4 满足多样化工程需要
无人机摄影测量不仅可以满足多种比例尺带状地形图的测图精度[20],且具有自动化、智能化、精确化的优势,可以快速准确地获取DEM、DLG、DSM和DOM数据,并对数据进行矢量化等操作,可满足多样化工程需要。
4 结论
三维实景模型的精度受航摄影像分辨率以及控制点的精度影响,无人机航测高程精度一般为影像分辨率的2~3倍左右,本文航摄影像分辨率约为3 cm,可推算高程精度为10 cm左右。通过将本文方法获得的三维实景模型高程与RTK实测数据进行对比分析,可以看出,高程差最大值为8 cm,可控制在10 cm以内,据此判定建立的三维实景模型能够达到实际测量精度要求。在航高200 m的情况下通过倾斜摄影测量的方式生成的三维实景模型成果,平面精度在5 cm之内、高程精度在8 cm之内,由此可以判定通过本文方法获得的三维实景模型能够达到实际测量精度要求,证明该方法的可行性。如需更高测量精度要求,可依照该方法,根据测区实际情况,降低航高,以提高航片分辨率和模型精度。在航高较低的情况下,若测区高程起伏较大,为保证无人机飞行安全,需分段分架次进行航测,如航高100 m情况下,在高差200 m山坡飞行航测,可以划分为两段飞行。
猜你喜欢
机电信息(2023年24期)2023-12-26 10:55:38
山东煤炭科技(2022年6期)2022-07-14 03:10:40
江苏安全生产(2022年5期)2022-06-16 07:51:04
军民两用技术与产品(2022年1期)2022-06-01 06:28:50
华人时刊(2021年23期)2021-03-08 09:27:24
河北地质(2021年4期)2021-03-08 01:59:14
上海大学学报(自然科学版)(2020年4期)2020-05-24 07:29:38
中国铁道科学(2019年5期)2019-10-19 07:55:14
测绘通报(2018年10期)2018-11-02 10:07:28
北方音乐(2017年4期)2017-05-04 03:40:09