
Future 5G-Oriented System for Urban Rail Transit:Opportunities and Challenges
2021-02-26 07:38JunhuiZhaoJinLiuLihuaYangBoAiShanjinNi
China Communications 2021年2期
Junhui Zhao,Jin Liu,Lihua Yang,Bo Ai,Shanjin Ni
1 School of Information Engineering,East China Jiaotong University,Nanchang 330013,China
2 School of Electronic and Information Engineering,Beijing Jiaotong University,Beijing 100044,China
3 State Key Laboratory of Rail Traffic Control and Safety,Beijing Jiaotong University,Beijing 100044,China
Abstract:As a development direction of urban rail transit system,the train autonomous circumambulate system (TACS) can operate in a safer,more efficient,and more economical mode.However,most urban rail transit systems transmit signals through industrial,scientific,and medical(ISM)frequency bands or narrow frequency bands,which cannot meet the requirements of TACS.As a promising solution,the 5th generation(5G) mobile communication provides more services for the future urban rail transit systems,and covers the shortages of exiting communication technologies in terms of capacity and reliability.In this paper,we first briefly review the research status of current train control system and introduce its limitations.Next,we propose a novel network architecture,and present new technologies and requirements of the proposed architecture for TACS.Some potential challenges are then discussed to give insights for further research of TACS.
Keywords:urban rail transit;train autonomous circumambulate system(TACS);prospective review;the 5th-generation(5G);train to train(T2T)communication;reinforcement learning(RL)
I.INTRODUCTION
Over the past 30 years,more and more cities,e.g.,New York,Paris,and Singapore have adopted the driverless train technology,which is quite different from autonomous driving.According to the Union Internationale des Transports Publics (UITP)’s classification of automation level,the current level of driverless train technology can reach GoA4,which is considered as an Unattended Train Operation (UTO) mode.However,trains under this mode need to be controlled by staffs to complete the operation of acceleration,deceleration,etc[1].Due to the lack of sensors and controllers,it is challengeable to actively discover obstacles and make a decision effectively avoid these collisions for current trains.As the evolution direction of future transportation,the train autonomous circumambulate system(TACS)can satisfy the flexibility requirements of urban rail transit with great potential.The safety,intelligence,and efficiency of this mode make it the first choice for constructing and upgrading the future urban rail transit systems.However,the proposal of TACS not only brings opportunities for intelligent development of urban rail transit,but also continuously expands the scale of application data,which increases the complexity of software application platforms,and challenges the reliability of wireless communication system.
As one of the most commonly used train control systems,the communication-based train control(CBTC)system mainly adopts wireless local area networks(WLANs)to implement bi-directional train to ground(T2G) communications,which has the advantages of small departure intervals and high operating efficiency[2,3].However,CBTC system has many problems,e.g.,multiple subsystems,various trackside equipments,and excessive coupling among subsystems for the reason that safety protection for train routing is highly dependent on the T2G communication system.Meanwhile,the CBTC system centrally manages the movement authority (MA) of a train,and damage of a single device will delay the train operation of the whole area.The above problems have brought more challenges and difficulties to the reliable construction,operation and maintenance of the CBTC system,and cannot meet the future needs of TACS in terms of efficiency improvement,interconnection,etc.In addition,research in [4,5]shows that WLAN technology has some limitations,such as the lack of integrated multiservice bearing,serious interference,and inability to support high-speed operation.
Although Long Term Evolution for Metro(LTE-M)has been under discussion to improve CBTC system capacity and service,this communication technology cannot cope with complex and emergency situations,nor can it accommodate some potential railway functions,such as autonomous driving and Railway Internet of Things (RIoT) based on large-scale connections [6,7].Thus,International Telecommunications Union(ITU)proposed the 5th-generation(5G)mobile communications as a promising solution to achieve more rail services.It will combine advanced technologies,e.g.,millimeter wave(mmWave),multiple-input multiple-output(MIMO)and multi-access edge computing (MEC),and finally reach ultra-high peak data rate about 1Gb/s,ultra-low system delay about 1-5ms,which is thousands of times capacity of the current network[8].
In order to enhance the safety and reliability of train operation and meet the requirements of TACS,trainto-train(T2T)communication is adopted in urban rail transit system.By simplifying the ground equipment of the traditional train control system and concentrating its functions on the onboard equipment,some essential information can be directly exchanged between trains.T2T communication technology is widely used to avoid collisions and has been studied in-depth for railway.For example,Thomas Strange et al.of DLR proposed the Railway Collision Avoidance System(RCAS) in 2007,which could be used to avoid collision with another train[9].The train control system with T2T technology is no longer dependent on centralized control equipment.Trains can communicate with each other through wireless link to directly obtain the position and speed information of nearby trains.To promote the realization of TACS,T2T technology needs to be combined with Reinforcement Learning(RL)to optimize control strategy,so that trains can be visual,thoughtful,and make decisions independently like intelligent robots.
In this paper,we propose a novel communication system architecture based on 5G and MEC for TACS,and focus on related communication and control technologies to achieve autonomous driving,including the T2T communication technology and the RL-based train control strategy.The rest of this paper is organized as follows.In Section II,we briefly describe the existing CBTC system and point out its limitations.The communication network architecture for the future urban rail transit system is given in Section III,and the T2T communication technology and RL method involved in TACS are further discussed.Section IV presents related technical challenges.Finally,Section V concludes the paper.
II.CBTC SYSTEM
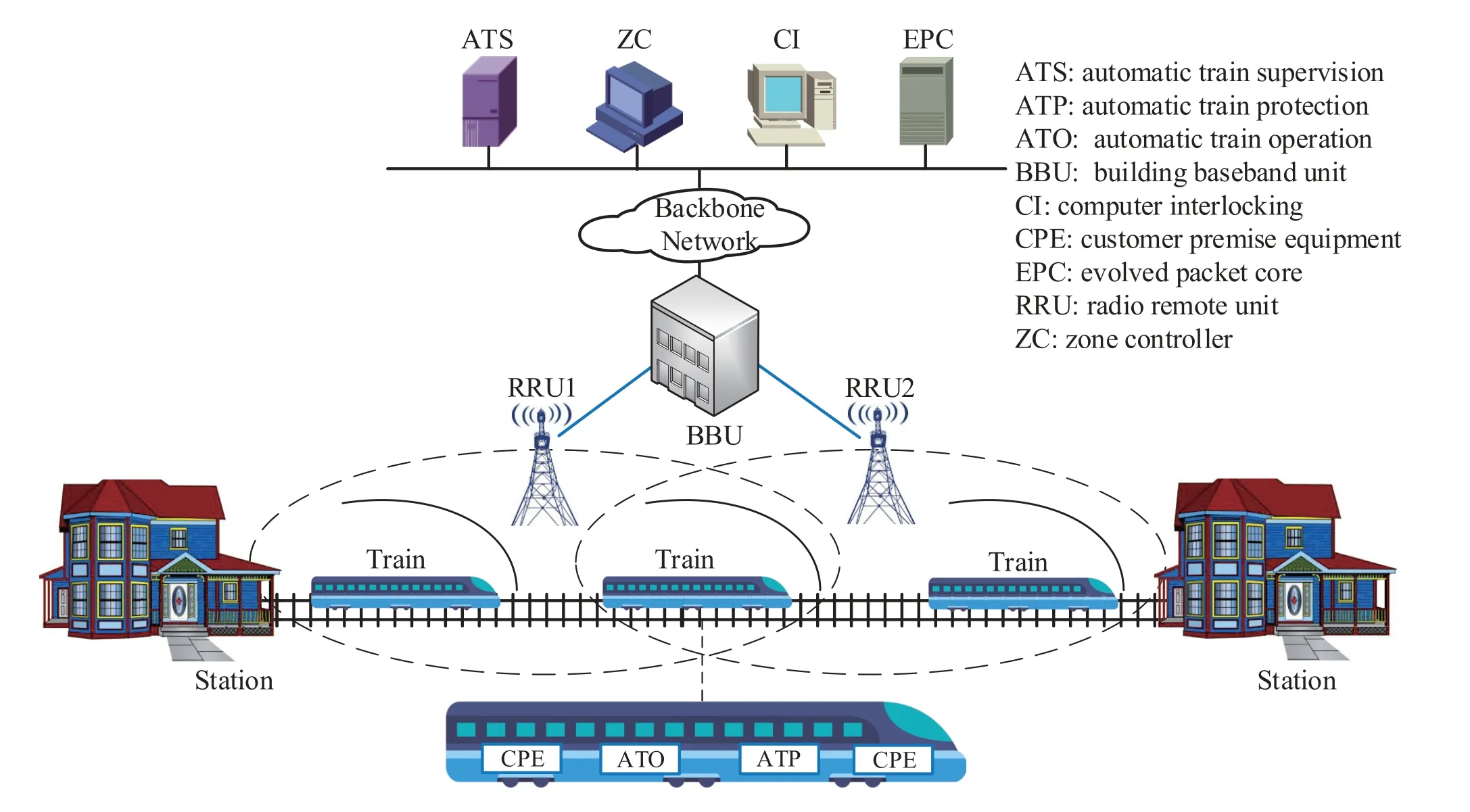
Figure1.The LTE-M based CBTC system.
The structure of the LTE-M based CBTC system is shown in Figure1.The system consists of central equipment,ground equipment,onboard equipment,and evolved packet core (EPC),each component includes multiple subsystems [10].As the core equipment of CBTC system,the Automatic Train Supervision (ATS) subsystem is responsible for compiling the operation map,automatically processing the train route,and adjusting the train tracking interval according to the operation map.Ground equipment mainly includes Computer Interlocking (CI) and Zone Controller (ZC).CI sets the train route according to the driving plan under the control of ATS.ZC is responsible for managing trains to operate in their area.The position and speed information of trains are transmitted between ZC and trains via wireless transmission links.ZC then processes the received train status information,converts them to MAs,and transmits them to each train operating online.The Vehicle on board control (VOBC) system is mainly composed of Automatic Train Operation (ATO) subsystem and Automatic Train Protection(ATP)subsystem,where ATO mainly controls the effective operation of trains and performs normal speed adjustment.The evolved NodeB (eNB) consists of building baseband units (BBUs) and radio remote units (RRUs),where RRUs are deployed along the track with an interval of about 1000m,and all RRUs are associated with the backbone network.The onboard customer premise equipment (CPE) is connected to the trackside RRU to provide the T2G communication channel between ZC and VOBC.The ATP system is responsible for train safety-related work,and completes safety-critical functions including speed and distance measurement,train positioning,and overspeed protection.When the driving speed exceeds the maximum allowable speed,the ATP system will activate emergency braking to ensure the safe operation of the train.However,when the ground equipment is damaged or the wireless environment is poor,it is impossible for the rear train to receive the status information of the preceding train and the updated MA in real-time.The control system can only guide the operation of the train according to the information received in the previous cycle until the system receives the updated data.At this time,the tracking interval between two trains will become significantly larger,which affects the system operating efficiency.In addition,when the ground equipment is in a long-term failure state,the entire line will be nearly paralyzed,which will bring great inconvenience to passengers’travel.
Compared with WLAN,LTE-M system can carry more and higher quality railway services,such as railway video surveillance and train multimedia dispatching.Some advanced physical layer key technologies,e.g.,orthogonal frequency division multiplexing(OFDM)and MIMO,and network layer key technologies,e.g.,IP packet switching technology and flat network architecture,can support LTE-M networks to achieve 100Mbit/s data transmission rate under high mobility [11].However,TACS has the potential to support a full range of real-time video surveillance along the railway,and provide RIoT with massive connections,wide coverage,and low power consumption,which cannot be supported by the LTE-M system.Therefore,considering the future requirements of intelligent railway infrastructure,intelligent traffic management,and intelligent railway services in TACS [12],higher frequency band technologies such as mmWave multi-antenna,the 5G mobile communication,and corresponding modulation and demodulation technology need be designed consequently to support higher capacity and data rate.
Developed from heterogeneous network,5G is compatible with existing wireless communication technologies.This means that while 5G for railway (5GR) can support all existing railway services,it can also provide a variety of emerging applications,such as real-time video surveillance along the tracks,multimedia train scheduling,and large-scale connections brought by RIoT,which will lay the foundation for the implementation and development of TACS.
III.NOVEL TECHNOLOGIES AND REQUIRMENTS OF TACS
The realization of TACS needs to rely on 5G networks and related technologies.Therefore,it is necessary to study the mobile communication network architecture suitable for railways.With the support of the proposed network,T2T communication can combine mmWave and MIMO technologies to enhance the reliability of information transmission.The proposal of TACS represents that urban rail transit will develop towards intelligence.Therefore,T2T communication technology can be further combined with artificial intelligence to truly achieve full autonomy.
3.1 Mobile Communication Network Architecture
5G standards include three major application scenarios:enhanced Mobile Broadband (eMBB),Ultra-Reliable Low-Latency Communications (URLLC),and massive Machine Type Communications(mMTC)[13–15].Due to high densities of passengers,high operating speed and massive sensors,the urban rail transit is considered as a typical scenario and need to develop in all three directions.The typical scenes of urban rail transit is summarized in Figure2.
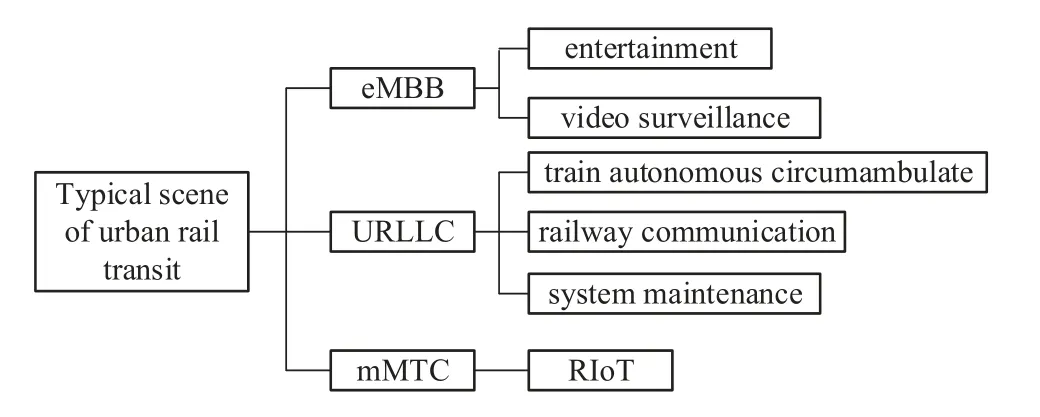
Figure2.Typical scenes of urban rail transit.
eMBB:This scenario mainly includes entertainment and video surveillance services.Continuously increasing traffic and demand have led to explosive growth in mobile video traffic.The stagnation and buffering of mobile video caused by network delay will greatly reduce the perception of audiences.5G has developed and utilized mmWave frequency band,which reduces interference from low frequency bands to meet the needs of passenger entertainment and communication.Besides,the large bandwidth and high rate make it suitable for high-speed multimedia transmission services.For railway video surveillance service,two methods are utilized to process surveillance data,i.e.,the data can be processed directly on the local camera or be transmitted to the remote server for processing.However,neither of these two methods can support comprehensive real-time video surveillance along the railway or inside the carriage.The former method requires each camera to have data analysis capabilities,which is extremely costly;while the latter method needs to upload a large amount of data to the server,which will increase the burden on the core network and cause large delays.If the MEC server is deployed locally,it can be used to process the surveillance video data and transmit back the events and video clips with changes,thus effectively saving transmission resources.A large amount of low-value surveillance content,such as some static and unchanged content,can be directly stored on the MEC server,which reduces the burden on the core network and improves processing efficiency.Moreover,MEC-based local distribution can avoid problems such as large delays,poor experience,and large backhaul bandwidth consumption caused by high-traffic circuitous services,thereby reducing costs,especially in urban rail transit scenarios where a large number of cameras are required.
URLLC:To realize the autonomous train operation,the train needs to have the functions of”environmental awareness,analysis and decision-making,and action control” like humans.Each function needs to be broken down into multiple tiny links (such as the detection accuracy of the sensor,the upgrade and accuracy of machine vision,the timeliness of data processing,etc.) to realize the ultimate safety and reliability.5G networks are split into multiple independent network functions,and the control plane and user plane are completely separated.The User Plane Function (UPF) sinks to the user side and works with the MEC server.When the destination address of the service flow is identified as local,it is diverted to the local MEC server for service processing,which simplifies the data transfer process and supports the realization of URLLC services.In addition,the URLLC scenario also includes railway communications and system maintenance services.In urban rail transit system,the transmission of control information determines the operational efficiency of trains.During high-speed motion,the state information of the train changes quickly.Processing and calculation at the edge device can effectively reduce the forwarding and processing time in data transmission.The updated MA can be quickly transmitted to the train operating on line,thereby reducing the train tracking interval.The MEC server deployed in the railway communication network processes the valuable operation data,and further transmit analysis results to nearby connected trains with ultra-low latency(usually in milliseconds),allowing the trains (drivers) to make quick decisions,which is more agile,autonomous,and reliable than other approaches.The perfect video monitoring service in the eMBB scenario can provide basic support for the remote maintenance of the train control system.Sensing information of railway infrastructure can be collected by various sensors and then sent back to the control center.In this way,many routine security checks can be performed in the remote control center.
mMTC:In the era of IoT,various sensing equipments are combined with Internet to form a huge network,enabling people,machines,and things to be connected at any time and any place,and the railway scene is no exception.RIoT will inevitably cause the bandwidth pressure brought by massive connections,and the post-processing of accumulated data will require more computing and processing equipments.At this point,the servers deployed at the edge of networks can well alleviate the pressure on the core network.
As mentioned above,the system capacity of railway mobile communications can be greatly enhanced by combining 5G with advanced technologies such as mmWave and massive MIMO.However,three major application scenarios in urban rail transit have put forward higher requirements for delay and reliability.In the current 5G network architecture,as the core network is deployed far away from users,the data transmission delay is relatively large,which cannot meet the requirement of the ultra-low latency service.In addition,terminating the business entirely in the cloud wastes bandwidth and increases latency.Therefore,delay indicator and the number of connections determine that 5G services cannot be all ended on the cloud platform of core network,hence MEC attracts more attentions of researchers.On the one hand,MEC can meet the requirements of low latency for the reason that servers are deployed at edge,and operate on terminal devices with faster feedback;on the other hand,MEC sinks content and computing power to provide intelligent traffic scheduling,so that some regional businesses no longer need to spend much time in the cloud to culminate[16,17].
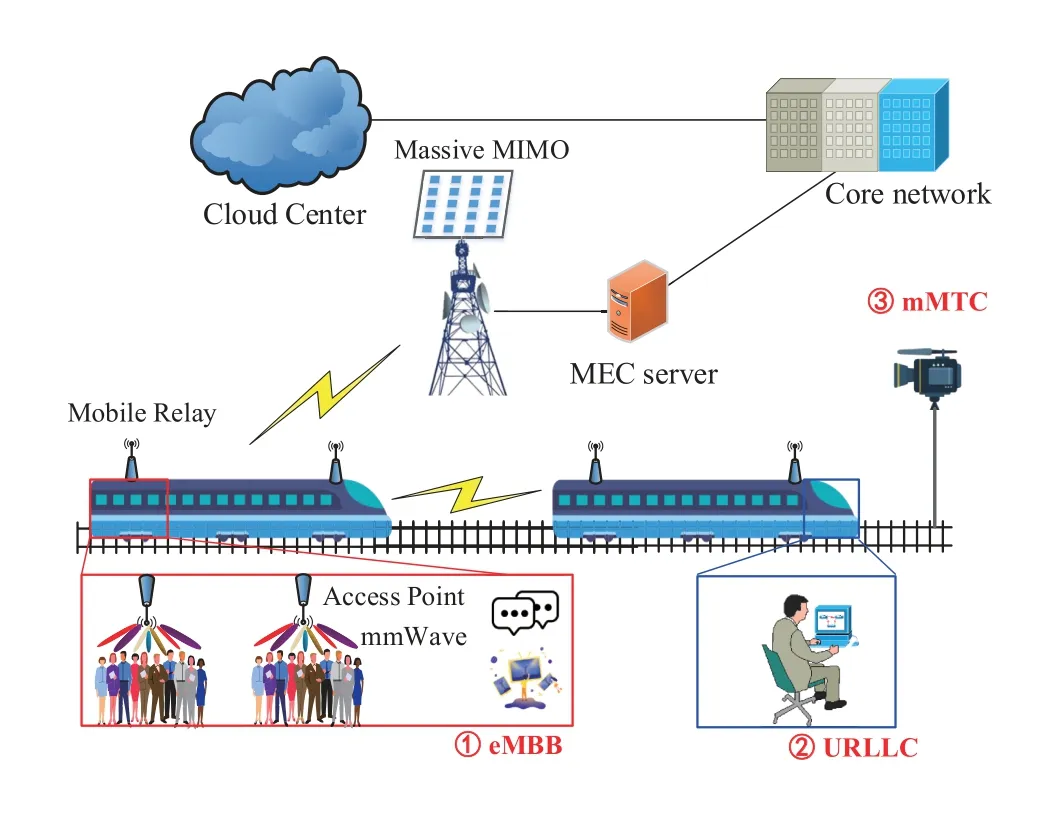
Figure3.Mobile communication network architecture for future railway systems.
As shown in Figure3,MEC technology is used to optimize the communication network of urban rail transit system.MEC servers are deployed along the railway,so that train communication data can be processed near the source in a timely and effective manner to improve wireless transmission stability,and reduce delay,and ultimately improve the user experience.In addition,in the MEC-based urban rail transit system,information such as road conditions,obstacles,and surrounding environment perceived by trains can be quickly calculated and transmitted through MEC servers,so as to predict how to operate next and promote the realization of TACS.
3.2 T2T Communication Technology
The T2T-based TACS is the evolution direction of the existing CBTC system,which enables the interconnection and coordination of multiple trains in urban rail transit network.It is a new generation of train control system with higher reliability,higher operation efficiency,and lower cost.Under the 5G communication system architecture,we consider a mmWavebased T2T transmission scheme.Even though T2T communication does not require high bandwidth for blind-spot warning and collision warning,it is expected that many other applications of the future urban rail transit will require ultra-high transmission rates,e.g.,real-time video surveillance,RioT,and automatic cruise control required for train unmanned driving.Therefore,the substantial improvement of the received SNR brought by the mmWave multi-antenna scheme can guarantee the reliability of T2T communication transmission,which further enhances the enthusiasm for the research of mmWave T2T communication in urban rail transit systems.Relevant system design and propagation measurements were also verified in [18],where the system was called SBDist.
Under the mmWave T2T communication transmission scheme,the transmit and receive beams are supposed to be steered and aligned in an adaptive manner to achieve greater beam gain.In practice,the adaptive manner can be realized by an antenna with a large physical aperture or a multi-phase antenna array.An antenna with a large physical aperture is not practical for the reason of high initial installation and postmaintenance costs.However,an antenna with a multiphase antenna array can achieve adaptive alignment of the transmitter and receiver beams while ensuring simpler operation and lower cost than manually or mechanically operated antennas[19–21].Assuming simple maximum SNR beamsteering,it makes sense to approximate the actual array pattern by a sectored pattern[22,23].Figure4 shows the adopted beamforming pattern,with strong directional mainlobe gain and negligible sidelobe gain,and it can be approximated by a two-dimensional ideal sectored antenna pattern for ease of operation,shown in Figure5.
As an essential part of railway system management,positioning can benefit the performance of the 5G communication itself [24].The position information can be used to reduce the overhead of the beam training process and mitigate the signal impairment due to the doppler shift in high-mobility cases.Sensors on the body can measure the train’s position and speed information in real time,and the accurate exchange and transmission of this information can be extremely simple for the future TACS.In this subsection,we assume a train turning scenario and focus on the alignment scheme of narrow beams between trains.Both sides of the T2T communication are equipped with enough antenna arrays that can only perform analog processing,and communicate through wireless channels including line of sight (LOS) components.To simplify the beam alignment process to the greatest extent,we propose an effective method to design the corresponding beamforming and combining vectors employing the position information exchanged between trains.
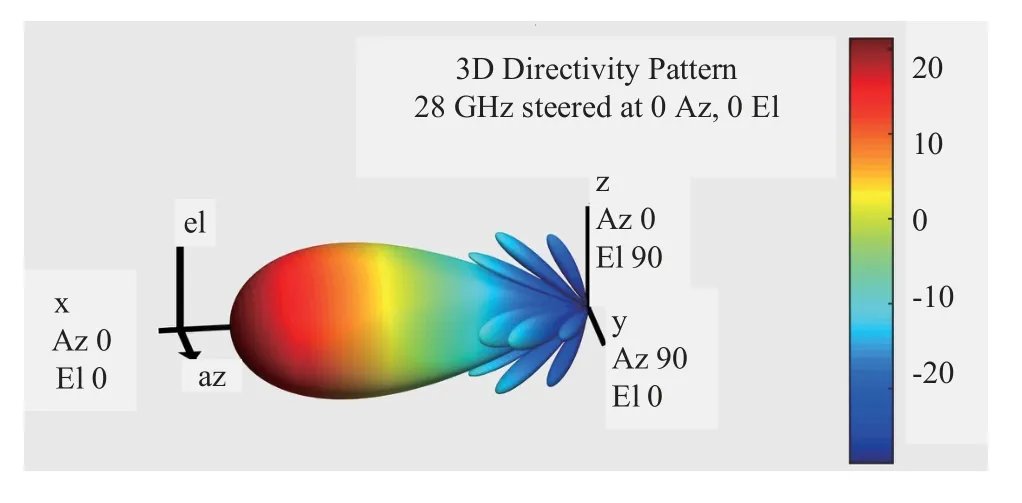
Figure4.Actual beamforming pattern.
Similar to the model in [25],the turning scene is shown in Figure5.Assume that when trains A and B are connected,their beams are aligned.However,inevitable turns or movements will cause frequent beam misalignment events.In this case,the beam alignment direction needs to be adjusted in real time according to the movement directions of train A and train B.For trains that communicate directly,the optimal beams usually point directly at each other,which is called“LOS beams”.We define the beam deflection angle as∂,which is the intersection angle between the main lobe and the LOS beam.When∂exceeds a given threshold,T2T communication is interrupted.
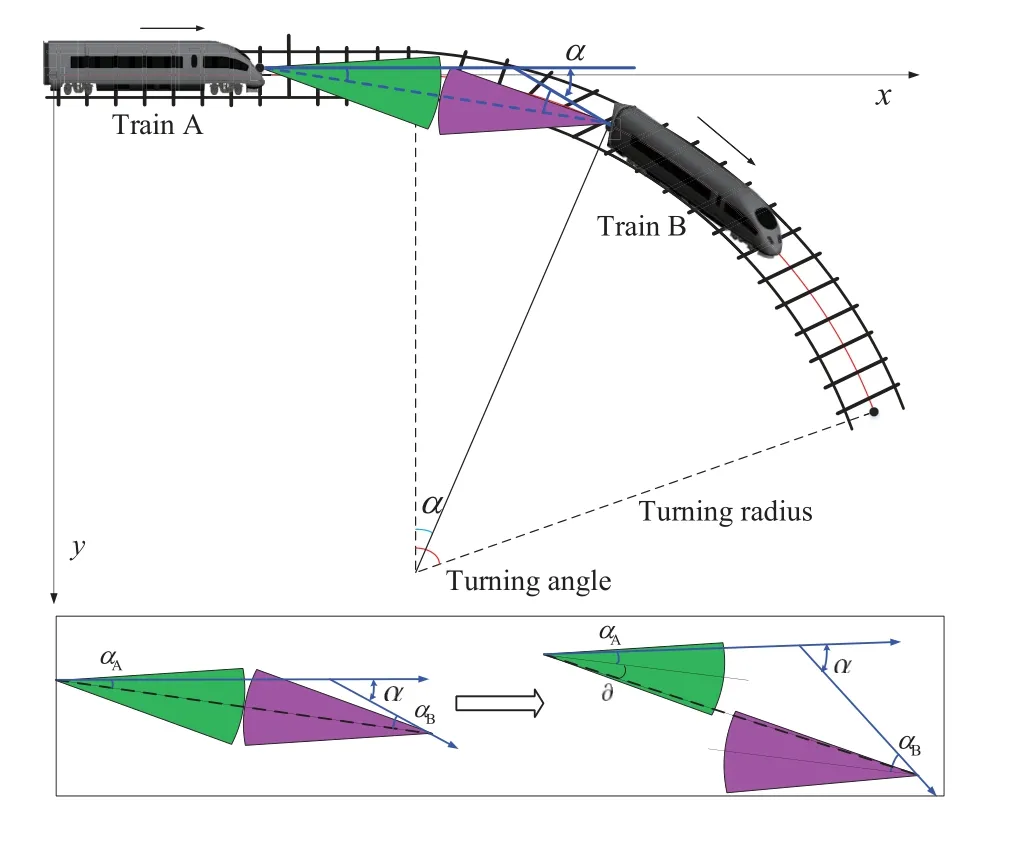
Figure5.System model.
Under high-speed operating environment,the highly time-varying channel will bring enormous challenges to the beam alignment process,thus a more effective beam training scheme is necessary.LOS channel contains a strong multipath component and multiple weak components,and its steering vector is equal to the best antenna weight vector.Therefore,in order to achieve high beamforming gain,the beam direction needs to be aligned with the main channel direction[15,26,27].Under this circumstance,the singlestream beam alignment problem is simplified to find the AoD/AoA of the LOS component,and then the transmit beamforming vector and the receiving combining vector are set as the steering vectors of the transmitter and receiver.In the T2T communication scenario,the AoD/AoA of the LOS component can be estimated based on the position information of the train.Thus we propose a location assisted beam alignment (LABA) scheme,and acquire the analog beamforming and combining vectors by comparing the estimated beam deflection angle with the quantized phase angle.
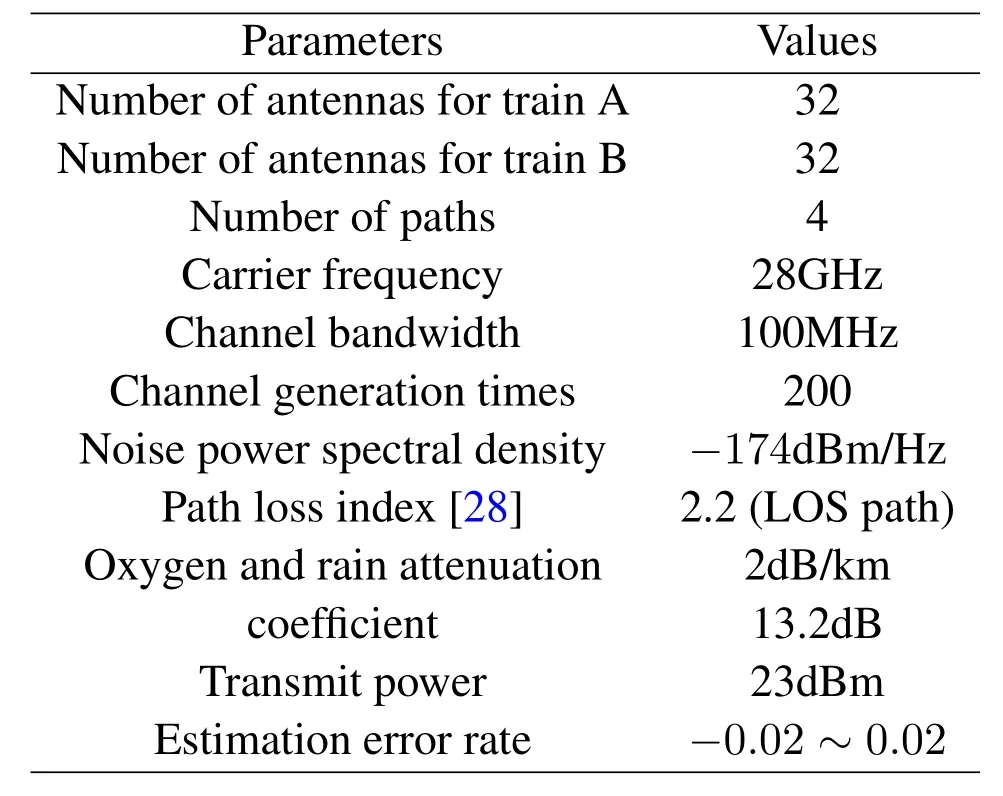
Table1.Simulation parameters.
Although the proposed LABA method can significantly reduce the complexity of beam training,there may be some errors in the position estimation information of the train,which will affect the accuracy of the beam deflection angle estimation and further cause the loss of SNR at the receiver.We use to denote error rate of the train position estimation in T2T communication system,and define the receive SNR loss rate.We use the simulated train turning process to evaluate the performance of the proposed algorithm,where the length of the straight track is 1km,the radius of the turning area is 600m,and the turning angle is.Meanwhile,it is easy to be expanded to other turning scenarios.The speed of the train traveling in a straight line is set to 27.8 m/s,and the average speed of the train in the turning area is 22 m/s.It is assumed that after leaving the turning zone,the train cannot accelerate to the highest speed temporarily.The simulation parameters are shown in Table1.Due to space limitations,we only verified the received SNR and the loss rate when the number of antennas was 32.As can be seen from Figure7,even if the estimated positions of train A and train B are inaccurate,loss rate of the received SNR is still within the acceptable range.However,it is worth mentioning that when the number of antennas increases,the loss rate of receiving SNR will increase significantly,and the superior algorithm performance cannot be maintained.Therefore,large estimation errors should be avoided in any scenario.
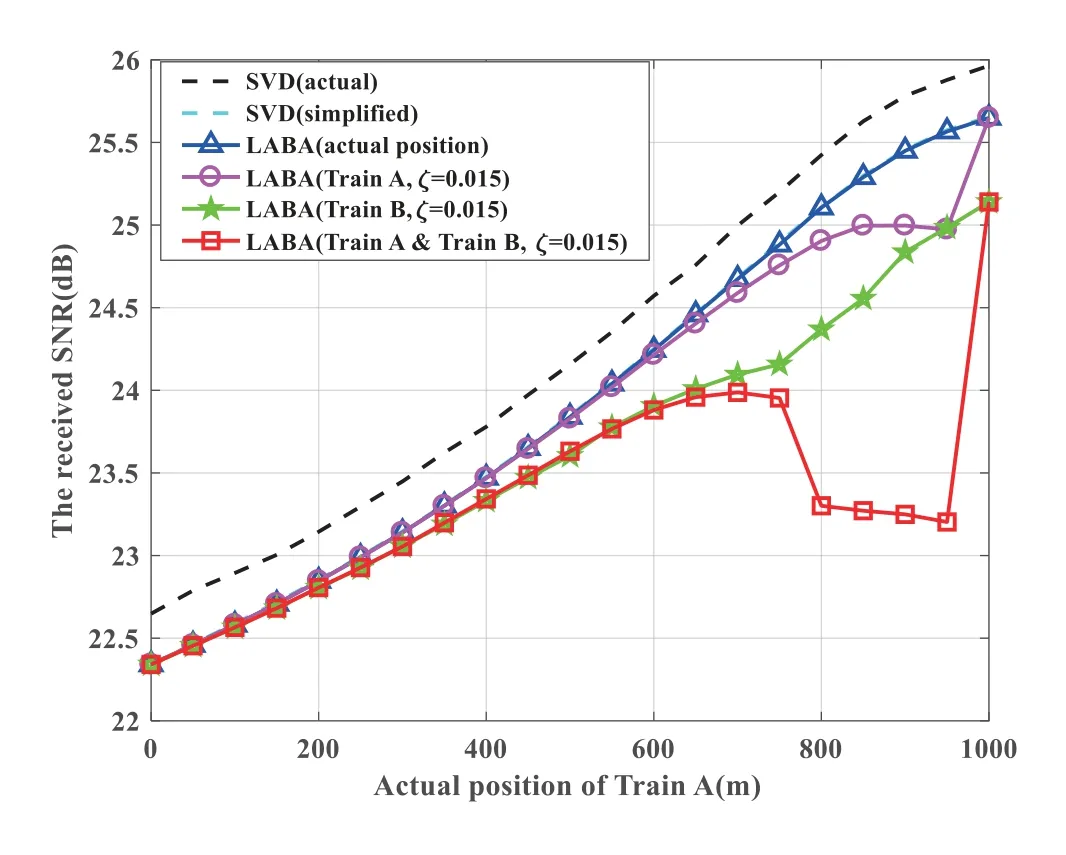
Figure6.Effect of estimation error on the received SNR(ς>0).
3.3 The RL-based Train Control Strategy
In the T2T-based urban rail transit system,the rear train can directly communicate with the foregoing train to obtain more information about it,which has significantly improved the train control system in terms of safety,intelligence,and efficiency.On this basis,if the RL method is combined with the train control system,the train can learn the optimal control strategy and adjust it in real-time by interacting with the environment[29].
TACS is an advanced intelligent system,and provides the train with additional equipment such as sensors,controllers,high-speed positioning instruments,high-definition cameras,etc.,which is equivalent to installing “brains” and “eyes” on the train.Trains,therefore,have the ability to acquire the operating environment and think independently.After the introduction of RL method,the train can always play a dominant role in the whole operation process without the staff involved and truly achieve automation.
During normal driving,the following train maintains a proper tracking interval with the preceding train at a safe speed.The sensor can detect the position and speed of the train,and periodically notify other trains on the same track through T2T communication.Based on the real-time information including speed of the following train and the preceding train,actual tracking interval,and desired tracking interval,the train controller outputs corresponding actions to allow acceleration or braking.
Figure8 depicts the RL-based hierarchical control framework.The layered train controller is composed of two leverls,and the upper level is responsible for calculating and processing real-time information to control the acceleration of the train,while the lower level receives the generated acceleration data and transmits it to the corresponding throttle or brake according to the current status of the preceding train.
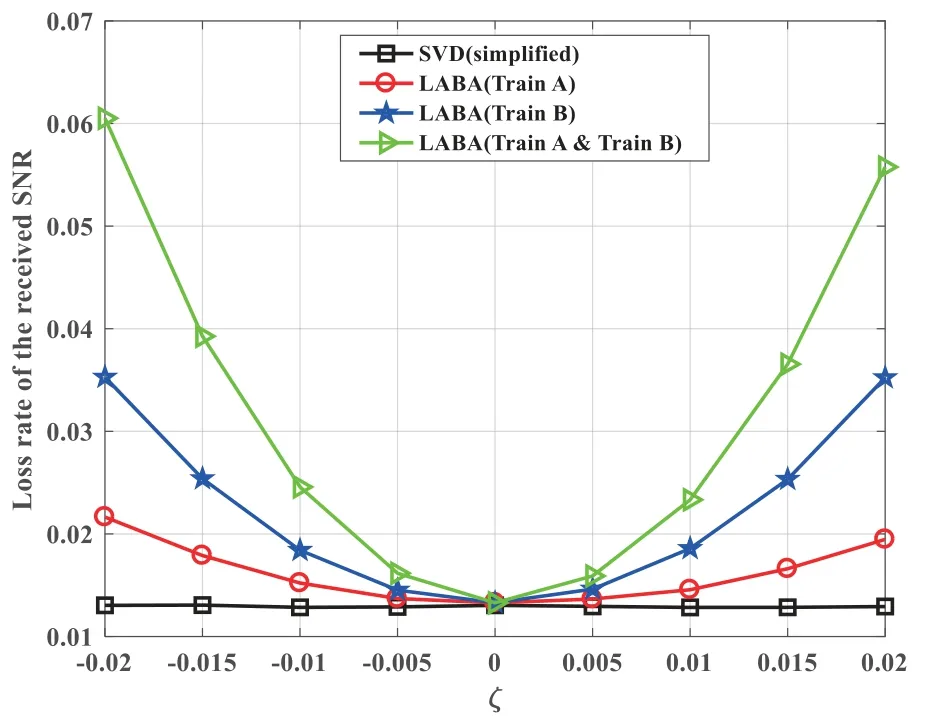
Figure7.Effect of ς on the loss rate of the received SNR.
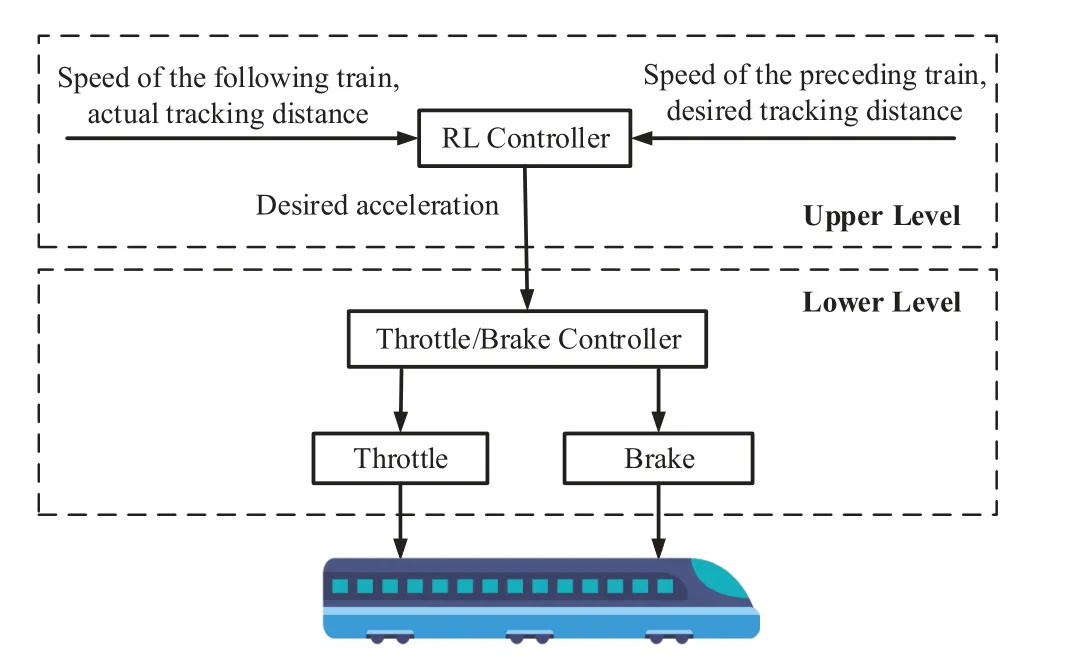
Figure8.The hierarchical control framework.
In an ideal tracking scenario,the relative speed of the preceding and the rear train tends to zero,besides,the train headway is close to the desired tracking distance.In the upper level,the controller attempts to maintain the ideal tracking scene through appropriate acceleration action.However,for different scenarios,considering safety and comfort,the relative speed and distance between trains have different threshold ranges.Besides,the acceleration and speed of the following train are limited based on safety,comfort,and fuel economy.
In urban rail transit,three typical scenarios need to be considered:
Straight travel scenario:In the case of straight travel,the two trains basically maintain the same speed and acceleration.In this case,RL methods is the most basic operation to optimize the tracking distance.By selecting a suitable RL algorithm,a relatively long distance between trains is maintained at high speed to ensure driving safety,and a shorter tracking interval is adjusted during low speed to improve operating efficiency.
Stop in and stop out scenarios:Before entering the station,the train needs to slow down to a complete stop,and the rear train needs to adjust its running state accordingly to avoid collision.After the train is out of the station,it shall slowly accelerate to normal operation,and the rear train also needs to adjust the operation state accordingly,so as to avoid the influence of excessive tracking interval on operation efficiency.Under the premise of ensuring safe operation,the train learns the optimal control strategy by interacting with the environment to adjust the tracking interval,while reducing the unplanned traction and braking time.
Turning scenario:Before entering the turning area,the train needs to slow down appropriately to ensure driving safety and passenger comfort.After leaving the turning area,it needs to accelerate to normal driving.At this time,the train calculates and outputs the required acceleration according to the status information (mainly the instantaneous speed and distance information)periodically acquired by the sensors to improve comfort and safety.
The RL method can learn the optimal control strategy by interacting with the environment without understanding the system dynamics.Although having adaptive learning capabilities,traditional RL methods usually converge slowly due to lack of data efficiency.It is the main limiting factor for real-time applications.Therefore,it is necessary to improve the traditional RL method to make it suitable for the future TACS.For example,a supervised reinforcement learning (SRL)method can be adopted,which compensates for the shortcomings of RL by integrating the respective advantages of supervised learning(SL)and RL.
IV.TECHNICAL ISSUES
While the 5G-Oriented System brings great opportunities to Urban Rail Transit,it also poses many challenges in wireless coverage,channel models,train control,sensor accuracy,and high-speed environments[30,31].
4.1 Wireless Coverage
Although the introduction of mmWave band and 5G system can provide the urban rail transit system with large bandwidth and high data rate transmission capacity,it brings the problem of wireless coverage.By focusing the radiated energy in the expected direction,beamforming can reduce wireless interference and greatly improve the data transmission rate of highspeed mobile users.However,due to high-frequency band and low coverage capability of 5G,the deployment of 5G base stations will be more intensive,resulting in more frequent handover.In addition,in the novel mobile communication network architecture,MEC equipment can guarantee the requirements of some delay-sensitive services and improve the stability of wireless transmission,while introduces the frequent handover of MEC equipments.
Heterogeneous network has attracted widespread attention recently [32,33].In the railway communication system,multiple overlapping networks can be integrated to meet the business diversity requirements of TACS in the future,which leads to a common scenario called “one service,one radio”.However,the mobile terminal needs to have interfaces to access multiple networks,which involves handover between different networks.In addition,establishing independent networks for various services can not realize the comprehensive bearing of multiple services under TACS.These shortcomings are not conducive to the flexible development of TACS services in the future,while greatly increasing the network complexity,and construction and maintenance costs.
4.2 Channel Model
In urban rail transit systems,T2T communication allows direct communication between trains.This will play an important role in reducing end-to-end latency,thus shorten the tracking interval.For 5G-oriented T2T communication system,the evaluation of communication quality and the realization of reliable communication are highly dependent on the establishment of the channel model.Although Paul Unterhuber et al.paid attention to the propagation environment of the T2T scene and described an actual channel measurement experiment in[34],the two parties of T2T communication traveled on different tracks.Mohammad Soliman et al.conducted the first dynamic mmWave T2T propagation measurements,however,more attention were paid to the effects of multipath components from ground reflections[19].Some works about T2T channel model are basically fixed in a certain frequency band and a certain scene,which makes the analysis of reliability and delay of train communication more limited.Due to the high cost of measurement and research,there are few researches on the T2T channel model under varies frequency band and scenarios till now.
4.3 Collaborative Communication and Control
The current urban rail transit system adopts a bidirectional T2G communication structure,which is still a long way from T2T-based TACS.During the evolution process,the coordination of T2G and T2T communication affects the efficiency and security of the train control system.Considering the effective use of resources and energy consumption,as well as the performance requirements of different services on delay and reliability,an appropriate cooperative communication scheme will be designed.
In addition,with the improvement of device computing,communication capabilities,as well as the development of distributed or decentralized ideas,people are increasingly aware that multi-system cooperation can complete more complex tasks at a lower cost.Compared with a single system,a multi-system architecture,especially a distributed multi-system,owns many obvious advantages.Therefore,in T2T communication scenario,formation control can be carried out for multiple trains with the same running status and route,so that the driving task can be completed more effectively and safely.After completing the design task of the layered architecture,the problem of multitrain formation is transformed into that of mutual cooperation among multiple trains,that is,the study of relative motion control among multiple trains.Moreover,how to choose the cooperative control scheme among multiple trains is also a challenging task.
4.4 Precise Sensors
Autonomous driving can effectively increase the running speed of trains and increase the frequency of departures.It is undoubtedly beneficial for passengers traveling during peak hours.TACS needs to install sensors,GPS equipment,and high-definition cameras on the train to provide accurate data for powerful computers to help the train complete the ”observationthinking-decision”process.Sensors and cameras polish the eyes of the train and grasp the tracking information in real time;the computing system uses realtime data to calculate and analyze whether there are obstacles ahead,and accurately calculate how to avoid collisions.As the soul of autonomous driving technology,precise sensors determine the reliable operation of TACS.The research on economical and suitable sensors for TACS will also be one of the major challenges in the future.
4.5 High-speed Environment
The higher speed of train results in the larger relative speed with the anti-scatterer in the environment,futher leads to the stronger the time-varying characteristics of channel.The multipath clusters often show a more obvious evolution process,which brings challenges to the establishment of channel model,information transmission and user access.5G operating in mmWave bands is used to support information transmission in TACS,however,the supporting ability of this technology for high-speed mobile scenes is not perfect.For example,the current outdoor mmWave technology only has a relatively stable performance in the static state and the walking state,and its implementation issues need to be studied for high-speed environments.In addition,the access problems of massive terminals in high-speed movement also need to be further explored and verified.
V.CONCLUSION
TACS represents the future development direction of urban rail technology,which can better meet the networked and intelligent requirements of urban rail transit operations,and provides an important infrastructure support for the urban rail transit to open up the era of intelligent rail transit with IoT.In this paper,we propose a 5G-oriented network architecture and investage some challenging research directions,including T2T communication technology and RL-based train control strategies.By adopting 5G and MEC technologies to optimize the urban rail transit communication system,higher transmission rate and more reliable wireless transmission can be achieved to meet the needs of some low-delay services,and guarantee the highquality user experience.In addition,some potential challenges in the development of TACS have been also discussed.
ACKNOWLEDGEMENT
This work was supported in part by the National Natural Science Foundation of China (U2001213,61971191 and 61661021),in part by the Beijing Natural Science Foundation under Grant L182018 and L201011,in part by National Key Research and Development Project(2020YFB1807204),in part by the open project of Shanghai Institute of Microsystem and Information Technology (20190910),in part by the Key project of Natural Science Foundation of Jiangxi Province(20202ACBL202006).
- China Communications的其它文章
- Multi-Stage Hierarchical Channel Allocation in UAV-Assisted D2D Networks:A Stackelberg Game Approach
- Performance Analysis of Uplink Massive Spatial Modulation MIMO Systems in Transmit-Correlated Rayleigh Channels
- Development of Hybrid ARQ Protocol for the Quantum Communication System on Stabilizer Codes
- Coded Modulation Faster-than-Nyquist Transmission with Precoder and Channel Shortening Optimization
- Analysis and Design of Scheduling Schemes for Wireless Networks with Unsaturated Traffic
- A Survey on Routing Algorithms for Opportunistic Mobile Social Networks