
水面舰艇纯机动规避被动声自导鱼雷效能仿真分析∗
2021-02-26 12:35:08
舰船电子工程 2021年1期
(上海船舶电子设备研究所 上海 201108)
1 引言
随着我国多批量新型号军用舰艇的建造以及逐步的装备相关部队,海军正加快发展成为一支舰艇种类基本齐全、可实现多兵种作战的较强的海上军事力量[1],舰艇多兵种作战能力的进一步提升为我国海军的战略性转型提供了必要的保证。与此同时,随着潜艇隐身技术的不断进步,以及鱼雷向着大航程、低噪声和智能化的方向发展[2],我国面临的水下威胁与日俱增,因此加强舰艇对水下鱼雷尤其是潜射鱼雷的防御能力十分重要。
鱼雷作为一种用来攻击水面舰艇的主要水下武器,其中潜射声自导鱼雷具有高航速、射击阵位广、发射后潜艇即可躲避搜索等特点[3],因此常被潜艇用来攻击水面舰艇。在对抗声自导鱼雷的多种方式中,水面舰的机动规避方法对于对抗水下鱼雷攻击具有重要作用,是结合使用其他对抗器材手段的基本策略[4]。在利用机动规避对抗声自导鱼雷的研究中,文献[5~6]主要考虑了一定小范围内的规避航向对于对抗效能的影响,本文在其基础上进一步研究了当声纳探测到鱼雷从水面舰小舷角一定方向来袭并报警后,水面舰采取迎雷或背雷的所有可能规避航向上的对抗效能,同时考虑水面舰的声纳报警距离、航速和规避航向变化这些敏感因素对于水面舰生存概率的影响。所得结论对于水声对抗系统的设计优化及作战策略研究具有重要的参考价值。
2 对抗态势与机动模型
2.1 作战态势描述
声自导鱼雷攻击水面舰艇时大多会采取相对于水面舰艇的大舷角或小舷角方位来袭[7],本文以小舷角鱼雷攻击为例,对单个声自导鱼雷攻击水面舰艇进行对抗分析。
敌潜艇发射声自导鱼雷以小舷角攻击水面舰时,水面舰利用机动规避防御声自导鱼雷的作战态势如图1所示。假设水面舰在声纳报警前以一定速度v1沿着航向θ=0°方向匀速直航,探测到某小舷角方位有鱼雷目标后,在一定反应时间内执行如图所示的多种机动规避方式,方式1):以当前速度,按照最终航向θ1(0°≤θ1≤180°)进行背雷转向后再直航规避;方式2):以当前速度,按照最终航向θ2(-90°≤θ2≤-180°)进行迎雷转向后再直航规避;方式3):直航加速到v2,再进行转弯后按照最终航向θ1或θ2直航规避。

图1 水面舰机动规避二维作战态势图
2.2 水面舰机动规避模型
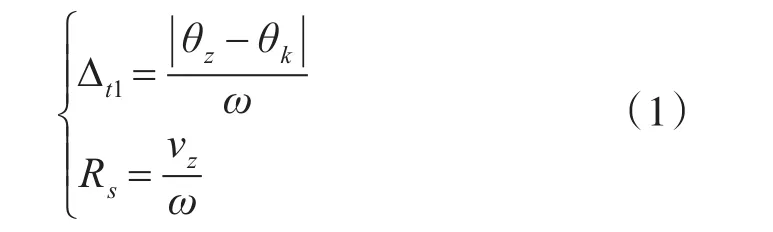
水面舰在转弯前后按一定航向直航,因此可按照直线方程较容易得到水面舰位置信息,这里主要给出水面舰转弯前后的位置变化信息以及转弯结束后直航过程中的位置变化。假设水面舰转弯机动前处于P1=(x1'y1)位置,其中y1=0,在此t1时刻,水面舰速度为vz,航向为θk,转向角速度与舰艇船长有关,取为一定值ω,转弯结束时刻为t2,转完后的直航航向为θz,则水面舰转向时间∆t1=t2-t1和转弯半径Rs为
水面舰转弯结束即处于t2时刻的位置P2=(x2,y2)的坐标:

转弯后即按照一定的速度和航向直航规避,在t3时刻的位置P3=(x3,y3)坐标:

上式中,∆t2=t3-t2。
2.3 鱼雷机动及性能模型
声自导鱼雷按自导方式的不同分为主动、被动和主被动联合三种鱼雷声自导类型[8],本文主要分析被动声自导鱼雷模型。
2.3.1 鱼雷被动声自导检测模型
对于被动声自导鱼雷,其在搜索水面舰时使用的检测模型采用的是被动声纳方程[9]:

式中,DT为检测域,SSL为舰艇辐射噪声级,TL为声波传播损失,NL为鱼雷干扰噪声级,DI为鱼雷自导接受指向性指数,单位为dB。
由上式可知鱼雷的被动声自导距离与水面舰的辐射噪声级有很大的关系,舰船的航速主要影响着其自身辐射噪声的大小从而影响鱼雷的被动声自导距离[10],按照文献[8]中的经验公式:

式中,Vs为水面舰航速,T为水面舰的排水吨位,f为接收机中心频率。
2.3.2 鱼雷运动攻击模型
根据文献[11~12],潜艇沿着某一方位向水面舰发射被动声自导鱼雷后,鱼雷先按照一定初始速度沿着既定航向进行直航自导搜索,当检测到目标并确定为敌方后立即加速到最大速度并通过转弯调整航向向目标自导追踪;若在跟踪阶段鱼雷丢失目标,则鱼雷采取定深直航以及旋回的弹道模式进入再搜索阶段;若鱼雷搜索过程中在计算的预定点未发现目标,则转而攻击自导扇面中可能存在的另一个目标或采取旋回弹道重新捕获搜索;直到鱼雷击中目标或其自身航程耗尽。
鱼雷转弯、旋回前后的位置变化可参考水面舰机动规避模型,这里主要的区别是鱼雷具有更大的角速度,更小的转弯半径。
4 对抗效能仿真分析
本文中采用系统仿真的方式,针对某一固定小舷角鱼雷来袭方位条件,重点研究水面舰的机动策略对被动声自导鱼雷对抗效果的影响。在明确前文分析的机动、攻击模型的情况下,改变水面舰机动规避策略,利用水声对抗效能仿真系统通过蒙特卡洛仿真方法得到对应的效能结果,对影响水声对抗作战效果的敏感要素进行分析。
4.1 初始条件与策略
假设水面舰在最开始以18kn(巡航速度)、25kn(中高速)、30kn(高速)沿着0°航向直航行进,敌潜艇在本舰右舷一定小舷角,距本舰一定距离处发射具有一定航程的被动声自导鱼雷对水面舰实施攻击。本舰声纳在近、中、远三种不同的报警距离发现目标进行报警后,水面舰保持当前速度或者经过一段加速时间达到最大航速,然后在一定的反应时间内进行转向规避,转向完毕后保持最终航向直航行进。对抗过程的各策略流程图如图2所示。

图2 对抗过程策略流程图
4.2 对抗仿真结果
基于上述模型与流程,对被动声自导鱼雷进行蒙特卡洛对抗效能推演仿真,结果如下所示。其中,图3、4是报警距离一定的条件下,水面舰以不同航速进行不同航向转弯规避的仿真结果;图5、6是航速一定的条件下,水面舰在不同报警距离进行不同航向转弯规避的仿真结果。

图3 不同航速下背雷规避成功率随航向变化曲线
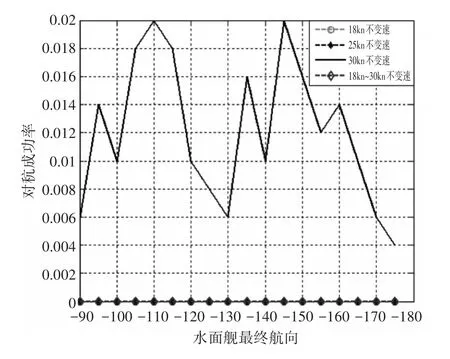
图4 不同航速下迎雷规避成功率随航向变化曲线
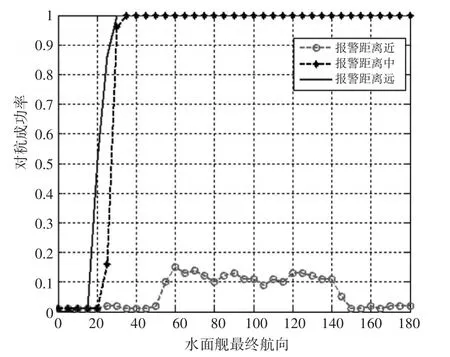
图5 不同报警距离下背雷规避成功率随航向变化曲线
4.3 结果分析
对仿真得到的结果进行分析可知:
1)对于被动声自导鱼雷而言,本舰机动规避的目的是使水面舰艇尽快脱离鱼雷自导接收扇面,拉开与来袭鱼雷之间的距离。被动声自导鱼雷发射时通常是遵循有利提前角的原则,所以从转弯航向变化上的对抗效能可知本舰实施转弯规避较直航规避更能有效规避鱼雷的攻击,且当鱼雷从小舷角向水面舰来袭时,水面舰不转弯直航的方式或采取0°附近一定航向的纯规避对抗成功率近乎为0%。
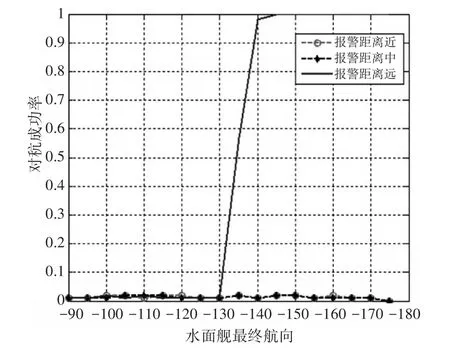
图6 不同报警距离下迎雷规避成功率随航向变化曲线
2)在声纳报警距离一定的情况下,水面舰航速越高,进行改变航向的机动对抗效能越高,其中水面舰以巡航速度采取任意航向规避对抗的效能为0,当水面舰由低航速到高航速的加速规避或采取保持原中高速及以上航速进行规避时会得到比较大的对抗效能提升,并在70°~165°范围航向上的对抗成功率为100%。
3)在水面舰航速一定的情况下,水面舰声纳报警距离越远,进行机动规避的对抗效能越高,其中对于背雷规避的60°~140°范围航向上,报警距离中、远条件下的规避对抗成功率比报警距离近的条件下的规避对抗成功率高近85%。
4)水面舰只有在具有高航速且报警距离尽量远的情况下的一定小范围航向迎雷规避的对抗效能较高。因此当对抗小舷角来袭的被动声自导鱼雷时,水面舰应尽量采取背雷航向的机动规避以获得尽可能大的对抗成功率。
5 结语
本文利用水声对抗推演及效能评估系统对被动声自导鱼雷进行了纯机动规避对抗效能仿真。在仿真过程中,明确了水面舰机动规避模型、鱼雷声自导及机动攻击模型,在此基础上,对不同报警距离下水面舰不同机动规避策略的对抗效能进行了仿真。本文研究了水面舰机动模型、被动声自导鱼雷的自导原理及运动攻击模型,仿真得到舰船规避机动策略对水面舰对抗鱼雷效能的影响,对影响效能的规避航速和航向、声纳报警距离因素进行了分析,得到的结论对水面舰艇水声对抗系统对抗声自导鱼雷的策略研究具有一定的参考意义,优化水声对抗系统防御末端鱼雷攻击的对抗方案,提高舰艇在反鱼雷攻击中的生存能力。
猜你喜欢
小学生学习指导(小军迷联盟)(2023年3期)2023-03-27 09:22:30
舰船科学技术(2022年22期)2022-12-13 03:37:24
水上消防(2022年1期)2022-06-16 08:06:56
小哥白尼(军事科学)(2021年8期)2021-11-22 07:58:22
智能计算机与应用(2021年5期)2021-10-05 12:45:18
小哥白尼(军事科学)(2020年8期)2020-05-22 06:28:02
舰船科学技术(2018年7期)2018-07-25 06:30:18
军事运筹与系统工程(2017年1期)2017-07-31 18:19:00
计算机测量与控制(2017年6期)2017-07-01 16:23:53
舰船科学技术(2016年1期)2016-02-27 15:39:23
