
匹配场高精度测向技术在海底线列阵中的应用研究∗
2021-02-26 12:35:22
舰船电子工程 2021年1期
(中国人民解放军91388部队 湛江 524022)
1 引言
匹配场测向是近年来兴起的一种重要的方位估计方法。匹配场测向技术充分分析了海洋环境时空变化的复杂性和声场空间分布并加以利用,能够对水下目标进行匹配定位,由此将海洋波导中的声传播理论和信号处理技术有机结合在一起,是平面波波束形成器的一种推广。传统波束形成存在谱峰偏移和分裂之缺点,匹配场技术恰好可以有效地克服,因为它并不是把到达接收阵的信号简单地按平面波处理,而是按全部声场处理。但是,在利用大孔径阵列进行匹配场波束形成时其探测性能会受到声场相干性的影响。为减小空间相干性下降带来的阵增益损失,对大孔径线列阵的匹配场定位算法可采用分子阵的处理方法。
2 水声匹配场处理模型
匹配场处理(Matched Field Processing,MFP)基本含义:利用海洋环境参数和声传播信道特性,通过水下声场模型计算接收基阵的声场,形成拷贝向量,并与基阵接收数据即测量场进行匹配,从而实现水下目标的被动定位和海洋环境参数的精确估计。海洋信道、声源和接收阵是水声匹配场研究的三大基本要素,这三者之间互相联系密切,遵循自然法则构成一个不可分割的整体,已知其中两者,就可以推算第三者。
在浅海多途环境下,使用平面波模型下的测向算法易引起空间谱峰偏离或分裂的问题,匹配场测向方法却能够有效地解决。由于匹配场测向处理方法需要对所在海洋环境参数了解清楚,在进行目标定位时通常需要对距离、角度和深度三维坐标进行极大值的搜索,也导致了计算量的大量增加。
在海底阵采用被动定位工作方式时,匹配场处理由于利用了环境声场信息,对潜探测及定位具有较好的性能,国内建成的固定式海底阵探测系统也采用了该项技术。中科院声学所在陵水布设的海底光纤阵测量系统,利用匹配场定位技术实现了对潜艇的远距离警戒和探测。
水平线列阵的优势是阵列海底固定没有位移,测量海区及海洋环境参数相对稳定,且没有舰船平台噪声的影响。由于匹配场充分利用了环境信息,匹配场测向可避免声线弯曲、传播信道等不利因素给常规波束形成或MVDR方法带来的误差。
设海水密度为ρ(z),由位于r0(0'zs)的单频点声源激励,在(r'z)处产生的声场p(r'z)满足Helmholtz方程:

式中c(z)为声波在海水中的传播速度。在柱坐标下由方程(1)可得到声场的简正波解表达式:

式中m为简正波模式号数,本征函数ψm和本征值krm分别表示第m号模式的形状函数和水平波数。只要给定声源位置及信号频率,即可计算任意位置的声压场。
Bartlett处理器是直接对测量数据和模型数据进行相关运算,其最大值处为声源信息的估计值。Bartlett处理器的输出功率为测量场与拷贝场幅度相关的平方,单频Bartlett处理器可表示为

式中pc为拷贝场向量,p为测量场向量,R为测量场的协方差矩阵,上标“H”表示矩阵的转置共轭。
对于阵元数为N的阵列而言,匹配输出为

式中(rn,zn)为第n号阵元的坐标,(r,z)为搜索网格坐标,(R,zs)为目标声源坐标,上标“*”表示共轭。
接下来推导均匀线列阵的匹配场模型,假如激励声源与相关阵元的水平距离为R,对于等间距的直线阵来说,各阵元与激励声源之间的水平距离可由余弦定理推导为

其中n为阵元序号,d为阵元间距,θ为目标方位角。
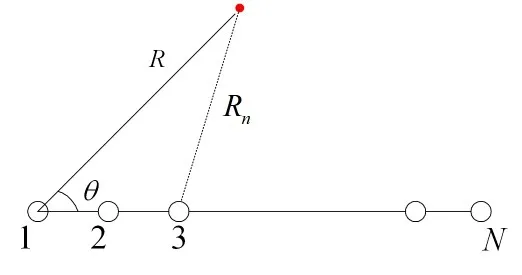
图1 均匀线列阵
由上式可得输出为

对于测向而言,当搜索到目标声源时,有θ=θs,z=zs,Rn=rn,此时匹配相关幅度最大,将距离Rn代入式(6)可得均匀线列阵的匹配场输出:
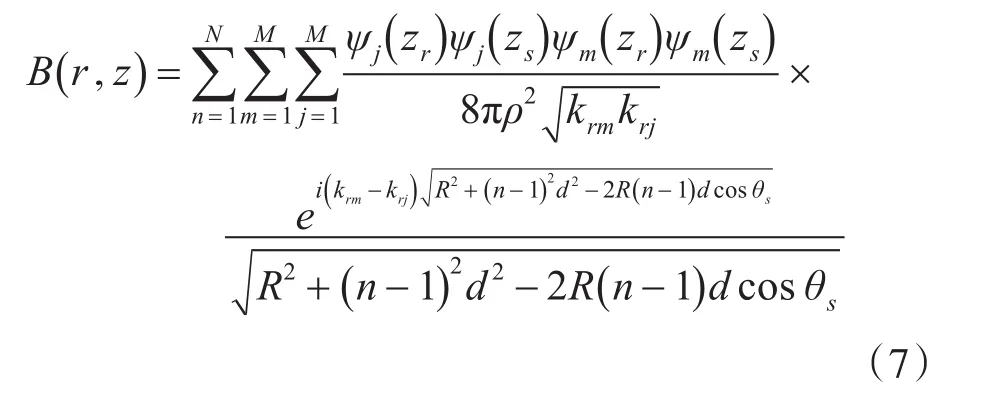
式中θs为目标方位角。
3 匹配场测向仿真分析
下面以潜艇、鱼雷的低频线谱目标为对象进行匹配场测向仿真,具体参数设定如下:潜艇低频声压谱级115dB@120Hz,鱼雷低频声压谱级130dB@120Hz。
环境模型:选取南海典型声速剖面,如图2所示,海深100 m。
基阵参数:海底均匀线列阵,阵元数为128。
以潜艇低频线谱声压级115dB@120Hz为分析对象,图3~图5为目标距离3km处,方位分别为10°、45°、90°时的匹配场测向模糊图。由图可知,波束图主瓣方向分别为10°、45°、90°,与目标真实方位一致,第一旁瓣高度分别为-0.5dB、-2.5dB、-3dB,3dB主瓣宽度分别为7.6°、1.8°、1.6°,即测向精度分别为3.8°、0.9°、0.8°。

图2 典型声速剖面

图3 目标方位10°测向结果(115dB@120Hz)
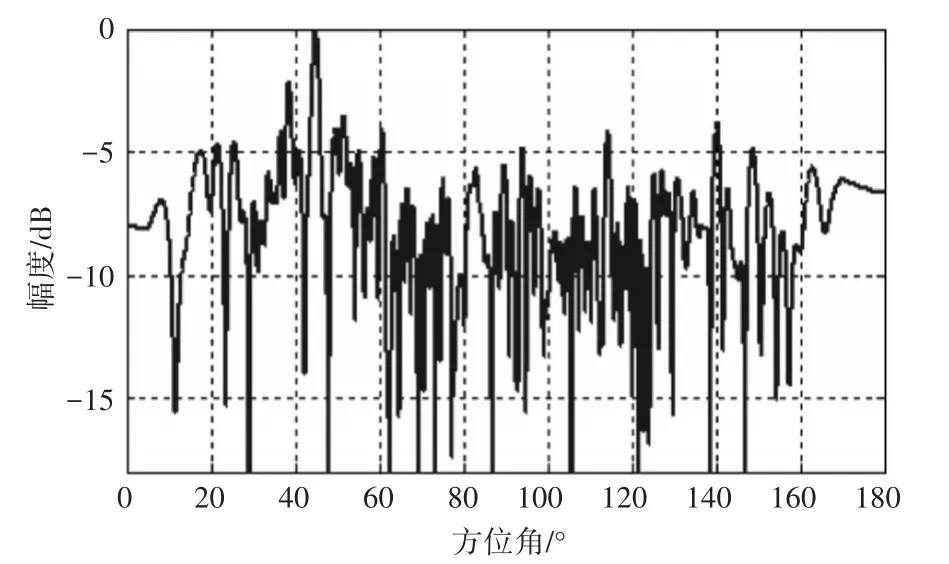
图4 目标方位45°测向结果(115dB@120Hz)

图5 目标方位90°测向结果(115dB@120Hz)
图6~图8给出了鱼雷距离5km,分别位线列阵10°、45°、90°时的匹配场测向结果,波束图主瓣方向与目标方位一致,3dB主瓣宽度分别为7.4°、1.4°、1.0°,测向精度分别为3.7°、0.7°、0.5°。
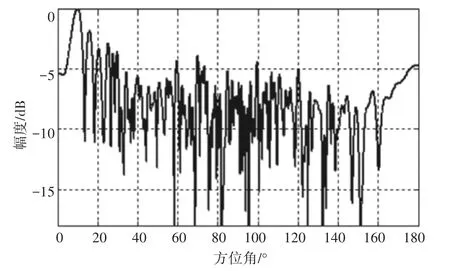
图6 目标方位10°测向结果(130dB@120Hz)
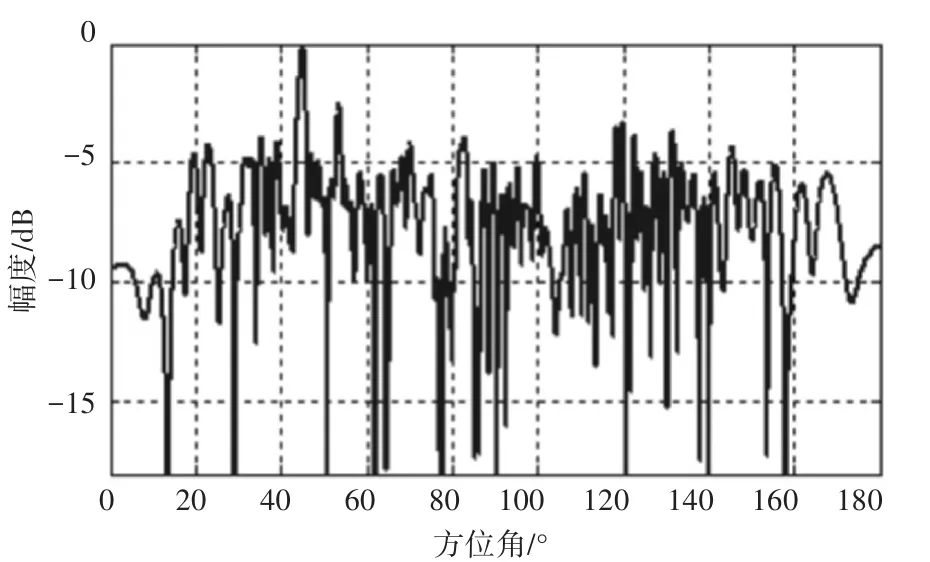
图7 目标方位45°测向结果(130dB@120Hz)
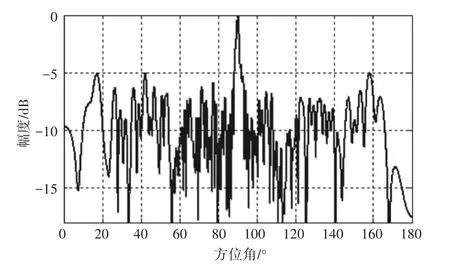
图8 目标方位90°测向结果(130dB@120Hz)
通过对比图3~图8可知,除了目标位于线阵盲区方向附近,在大部分方位上128元线列阵可实现对目标的高精度匹配场测向,测向精度优于1°。
本节主要建立了基于海底线列阵的匹配场高精度测向模型,以潜艇和鱼雷低频线谱为对象,仿真分析了其测向性能,得到以下结论:采用海底128元线列阵,对于声压级115dB@120Hz的目标,在距离3km以上,可实现测向精度优于1°;对于声压级130dB@120Hz的目标,在距离5km以上,可实现测向精度优于1°。
4 匹配场测向海上验证试验
基于以上仿真分析结果,我们在某海域组织了海上验证试验。试验海区水深100m左右,通过布缆施工船将两条低频光纤水听器阵铺设至海底,阵型态势如图9所示,两条阵由一条海缆串连至施工船,低频阵L1、L2的水平间距为5km。光纤水听器阵的基本参数:L1阵总长度800m,128个基元,设计频率120Hz,阵元间距6.25m;L2阵总长度1600m,128个基元,设计频率 60Hz,阵元间距12.5m。
测向精度试验中,由信号发射船携带低频声信号源依次从各预定点位发射不同谱级的低频声信号,依据两阵的不同方位和距离,选取了5个信号发射点,基本态势如图9所示,发射信号为单频线谱(@120Hz)和宽带噪声(45Hz~300Hz),脉宽均为24s,周期40s。L1阵和L2阵分别对目标进行方位估计。
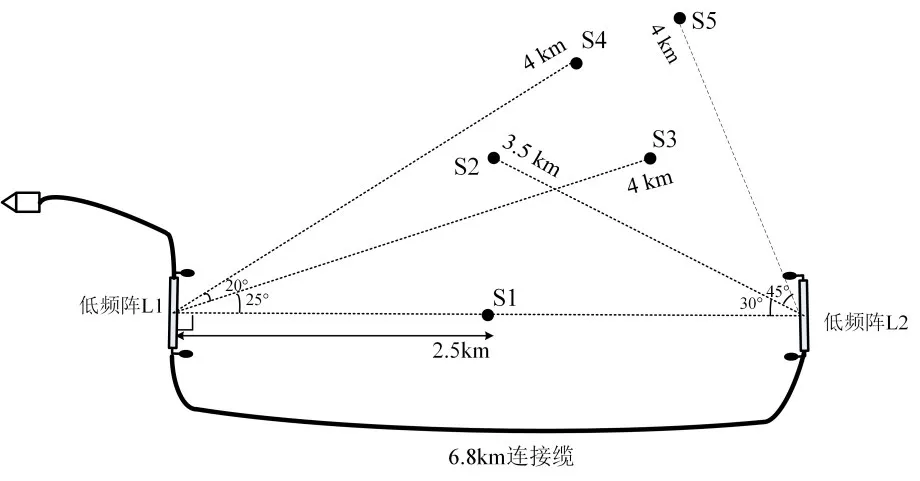
图9 测向精度试验态势图
图10~图13为S1点两条线列阵对不同声源级的120Hz线谱信号,形成的方位时间历程图及测向结果。数据处理模型采用近场常规波束形成方法,为统一两条阵的坐标系,图中给出的方位值均为目标与阵中心连线与正东方向的夹角,目标方位测量值与GPS实时记录数据的均方误差记为测向误差。
L1阵的测量结果如下:声源级为135dB时,在信号发射时段内目标方位测量值为84.8°~83.6°,GPS记录结果为84.9°~83.7°,平均误差为 0.1°;声源级119dB时,目标方位测量值为81.5°~81.0°,GPS结果为81.7°~81.1°,平均误差为0.2°。
L2阵的测量结果如下:声源级145dB时,目标方位测量值为 309.2°~308.2°,GPS 记录结果为308.7°~308.6°,平均误差为 0.5°;声源级为 135dB时,目标方位测量值为308.3°~308.5°,GPS记录结果维持在308.6°,平均误差为0.2°。在L2阵的方位时间历程图中,均不同程度地产生了栅瓣,主要是由信号频率高于基阵设计频率造成的。

图10 L1阵方位历程图135dB

图11 L1阵方位历程图119dB
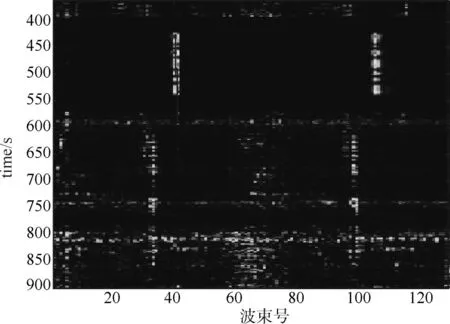
图12 L2阵方位历程图145dB

图13 L2阵方位历程图135dB
同理,将S2点至S5点目标测向数据与GPS实时记录数据进行比对分析后,将所有目标声源级和位置点的测量结果进行分析汇总,如表1所示。表中符号“--”表示,两条线阵均没有测到S2点119dB的目标信号。
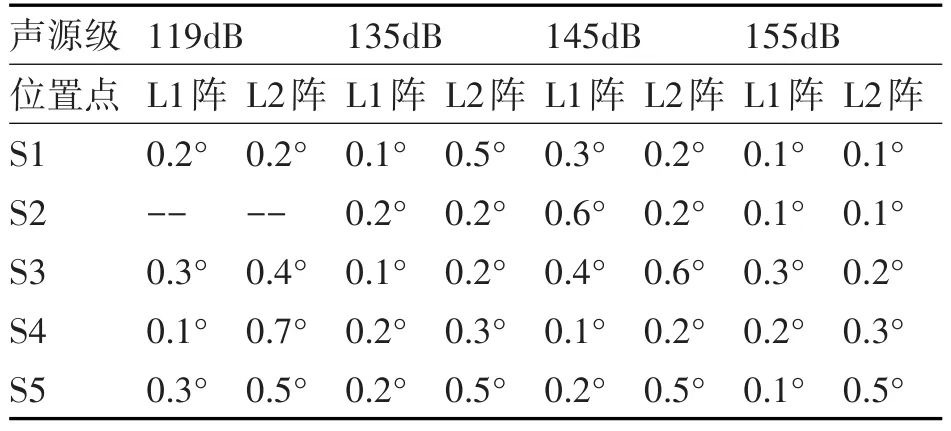
表1 不同发射点位测向结果
总体来看,在距离2km~5km范围内,除阵列端射方向10°以内的小部分盲区范围以外,针对不同声源级的目标信号,两条线阵的测向精度均在0.7°以内,最优可达0.1°,海上试验结果很好地验证了仿真分析结论。
5 结语
针对典型的水下目标噪声等级,本文通过仿真分析研究了128元海底线列阵针对不同目标的匹配场测向性能,结合海上试验验证给出了海底128元线列阵的测向精度分析结果。利用匹配场测向法进行被动定位,虽然目前取得了一定的成果,但是笔者感觉需进一步深入研究的三个问题是:一是匹配函数的选择,匹配函数应在计算声场分布与实际采样的声场分布匹配最好时呈现最大或最小;二是水声信道模型的选择,选定的信道模型描述声场是否精确将直接决定定位结果的精度;三是搜索方法的选择,应选择一个既能保证精度又能保证速度的全局搜索方法。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15 07:54:30
铁道通信信号(2020年12期)2020-03-29 06:21:56
电子制作(2019年23期)2019-02-23 13:21:12
家庭影院技术(2018年11期)2019-01-21 02:20:54
电光与控制(2018年11期)2018-11-21 03:38:22
船舶经济贸易(2018年7期)2018-08-02 07:24:24
电光与控制(2018年4期)2018-04-19 01:19:59
噪声与振动控制(2016年5期)2016-11-09 09:09:47
舰船科学技术(2015年8期)2015-02-27 15:38:48
振动工程学报(2014年2期)2014-03-01 01:15:23
