
考虑障碍避让的寻迹机器人多路径信息智能定位方法
2021-02-24 10:13:18姜旭东杜银波于学斗
制造业自动化 2021年12期
姜旭东,杜银波,于学斗
(1.临沭县人民医院设备科,临沂 276700;2.德州学院,德州 253023)
0 引言
可移动的寻迹机器人能够感知周围环境,并能够通过动态决定的执行与规划来控制自身的运动,寻迹机器人技术的诞生与发展对于人类生产来说带来了巨大的影响。寻迹机器人由于自身具有一定的路径决策功能,因此能够在一些恶劣条件下代替人类进行一些工作,在生产、驾驶等多个领域均取得了较好的效果[1]。但是目前寻迹机器人在多路径信息的智能定位中,由于寻迹机器人在工作范围内会存在一定的障碍。与传统的工业用机器人相比,寻迹机器人服务的区域环境是具有一定机动性的。也就是说,在工作范围内,可能出现的障碍物的数量以及位置都是随机的,传统的寻迹机器人多路径信息智能定位中所得到的机器人路径还有一定的优化空间,从路径长度上来说并不是可选择的最佳路径,为了提升机器人工作效率,因此本文在考虑障碍避让的情况下,设计一种寻迹机器人多路径信息智能定位方法。
1 考虑障碍避让的寻迹机器人多路径信息智能定位方法
1.1 引入基于障碍避让的传感器技术
对于工业用途中的寻迹机器人来说,在任务进行的过程中,遇到障碍物会发生一定的碰撞,导致损坏或侧翻,在多路径的信息智能定位方面也存在误差,因此影响机器人在正常工作中的性能。为了保证寻迹机器人能正常工作,需要使机器人能够对障碍进行避让。传感器的主要作用就是能够精准获取环境外部信息,令机器人在任务完成的过程中实现障碍避让[2]。机器人中安装的传感器必须要能够精准地测量到行驶范围内障碍物的状态数值,主要是由于传感器内部存在特定部件,能够测量出我们需要的信息,在获取到数值信息之后,将其转换成传感器可以发送的电信号,在信号调节以及内部组件的共同作用下完成信号的传输。传感器的种类很多,因此一些传感器在进行信号转换时,需要预转换才能实现数据与电信号之间的变动。除此之外,传感器中还存在一些敏感元件,能够直接测得理化信号并完成内部计算,直接输出对应的参数量,例如热敏电阻就能够感知温度变化,并将其转化成电参量之间的变化。另外,传感器中的转换元件也是重要的核心部分,在实际的应用中,传感器整体的使用应该具有测量范围足够大的量程,并与机器人和工作环境具有较好的适配性[3]。对于红外传感器来说,需要能够发射和接收红外光,利用障碍物的反射光接收时间差,能够计算出障碍物距离。搭配超声波传感器中陶瓷片所具有的压电效应,能够利用超声波对外部环境信息进行探测。压电陶瓷片的极化效应如图1所示。
图1中的极化效应实际上是传感器压电陶瓷片受到外界压力后的一种微小变化。当压电陶瓷片接收到传感电压之后,由于电荷之间的作用力影响,电陶瓷片外部电荷会出现极化现象从而发生形变,传感器通过微小的形变来实现消息的传递与接收。

图1 压电陶瓷片的极化效应
1.2 寻迹机器人工作多路径信息建模
通过传感器技术获取到障碍物信息后,由于机器人仅在地面移动,因此在建模过程中,忽略掉障碍物的高度,在二维环境下进行环境建模,通过传感器接收到的信息,对机器人工作的空间进行静态分割,分割成两个或两个以上的区域,在信息智能定位的过程中可以大幅提高计算效率[4]。在一般的方法中,一般利用栅格来构建环境地图,这样能够将机器人和障碍物有效的利用颜色进行区分,并且能够控制栅格的大小来满足不同建模的精细程度。栅格建模能够实现具体环境的离散化,并能够清晰展现出机器人的运行路径,并在计算过程中提供便利,并将栅格与实际环境区域进行对应。在机器人工作过程中所建立的二维环境区域内,在进行环境建模分割之前,首先要设置机器人运动范围内所有障碍物的边长集合为h,则可以得到环境建模空间中的分割阈值,设置为范围内最大障碍物的边长长度值hd,可以用式(1)来表示:

在建模过程中,假设机器人工作的范围空间长度为H,将整个范围内的二维环境模型利用分割阈值分割,根据具体分割次数的不同,得到不同的分割部分[5]。在环境空间建模的过程中,需要正确识别传感器探测的射线,确定射线将要进入的分区序号Nnew,判断过程如式(2)所示:

上式中,zpc表示寻迹机器人所携带的传感器在超声波/红外管发射射线分割点的映射位置;z表示该射线在行驶范围内的二维方向向量的高度绝对值;u和d为下半分区中某静态小分区序号。在此基础上,对所有点进行最小化处理,能够得到点之间的平面距离和像素值差异,得到精确建模位姿。
1.3 规划信息定位路径
寻迹机器人在完成工作范围内的信息建模之后,根据得到的模型需要对自身的行走路径进行规划,在全局规划下根据得到的实时环境模型有效规避障碍物,并选择最优路径达到目标点。寻迹机器人在行进过程中,需要根据内置的导航行进航线的调整和转向,传感器的位置也一般在机器人的中心位置,且发射出的信号基本是平行于地面的。机器人在这样的二维空间下,当预先设定了某种任务需求时,能够利用遍历的方法找到一条从起点到终点找到路径最短的且能够完成障碍避让的路径。本文在规划信息定位路径的过程中,不仅需要从全局视角下进行规划,还需要根据实际情况对局部路径进行规划。局部的路径修正一般是保证总体上机器人行进的路程最短,在经过角度和距离的计算之后,将得到的结果结合信息模型进行综合分析,将最终的结果发送到串口位置。路径规划的修正流程如图2所示。

图2 路径规划的修正流程
在转向判断的过程中,需要在机器人的导航线上选取任意两个点,并获取这两点的坐标和传感器的重心坐标,并假设任意两点间的连线方向为机器人的行驶方向,并根据坐标之间的计算关系,确定传感器在行进方向上的位置。在图像上能够表示出中心点和导航线之间的关系,利用几何知识能够判断出机器人的位置。在机器人前进的过程中,如果遇到障碍物,需要进行行为仲裁执行,在遇到障碍物是,需要抑制前行的保持行为,根据信息定位过程中的规则来执行减速避障行为。
为了精准地确定机器人的偏离程度,需要计算出精确的偏离角度,能够提升机器人在行走过程中的准确度。偏离夹角的计算公式为:

上式中,(x1,y1)、(x2,y2)是选择的任意两点的坐标,那么当发生偏离时,则有:

上式中,(x3,y3)是传感器的坐标。对于路径中间含有特定目标点的情况下,机器人在工作范围内,从预先设置的起点出发,在最终达到终点的过程,中间还会按照顺序有若干个目标点,机器人需要按照一定的顺序进行停靠。在这样的形式任务下,想要得到最优路径,就需要从全局进行规划。本文信息智能定位方法的主要目标是令机器人在工作过程中,从起点到终点选择总长度最短的路径,根据最短路径的算法,构建出网格图来方便计算,按照各个中间目标点的位置建立集合,将各点之间的最短路径求出,并与障碍物的形状信息之间进行融合,并记录到有效的可视点和可视路径的长度,能够得到相应的可视点。由于障碍物形状的不同,可以得到多条不同的路径,取所有可行路径的最短路程的最小者,即完成多路径之间的信息智能定位,得到寻迹机器人的最佳路径规划。至此完成考虑障碍避让的寻迹机器人多路径信息智能定位方法的设计。
2 方法性能测试
2.1 测试环境流程设计
为了验证本文设计的考虑障碍避让的寻迹机器人多路径信息智能定位方法的有效性,需要将设计的智能定位方法在实际的应用中进行测试。设置实验场地内寻迹机器人的工作范围为300*200的长方形区域,并在其中设置不同形状的障碍物,并在其中设置多个不同形状的障碍物。测试实验场地障碍物的示意图如图3所示。

图3 测试场地障碍物示意图
上图中,点O为寻迹机器人的起始位置,在以该点作为原点建立坐标系时,可以利用坐标描述出不同形状障碍物顶点或圆心的位置。假设上图中每个小方格的边长为一个单位,那么设定寻迹机器人在直线行走的过程中最大速度为3个单位每秒,在转弯过程中,最大的转弯速度可以通过下式求出:

上式中,r表示转弯半径,转弯过程中如果最大速度超过上式所得的值,那么机器人将会发生侧翻影响接下来的测试。在实验场地中,存在以下几个特殊点,点O(0,0),点A(110,80),B(50,170),C(250,180)。在考虑到障碍避让的过程中,机器人从点O出发,依次经过A、B点,以C点作为机器人的行驶终点,并分别使用本文设计的考虑障碍避让的寻迹机器人多路径信息智能定位方法和传统的基于模糊控制的信息智能定位方法进行测试,利用两种方法分别得到两种不同的路径规划方案,并对比两种路径的优劣。
2.2 实验结果对比与分析
在上述实验环境下,分别得到两种定位方法下最终计算出的寻迹机器人路径,如图4所示。
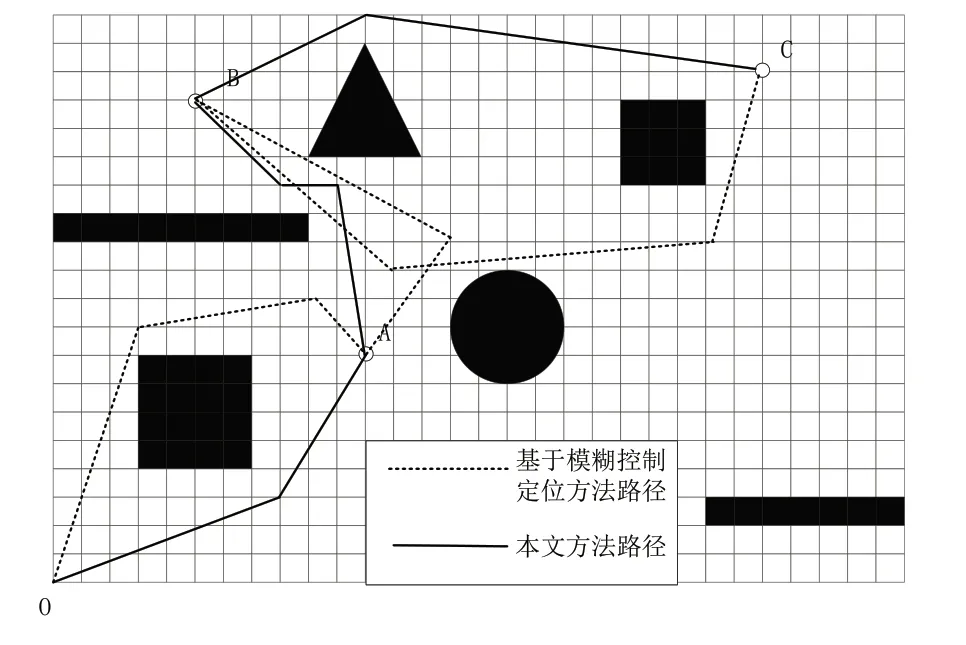
图4 两种方法路径对比
将上图中的测试结果输入到分析软件中进行编程计算,得到的分析结果如表1所示。

表1 两种方法下的路径分析
根据上表中得到的数据,可以计算出两种方法下寻迹机器人行驶的总路线长度,传统的基于模糊控制定位方法路径方案的总距离为604.76个单位,本文方法路径方案的总距离为475.51个单位,对比两路线的距离,可以得知本文多路径信息智能定位方法下得到的路径方案更短,对于寻迹机器人在实际中的应用,是具有一定的便利和指导性的。
3 结语
本文针对寻迹机器人目前在多路径信息智能定位方面存在的劣势进行了研究,在考虑障碍避让的情况下,引入传感器技术,完成多路径信息的建模,规划信息定位路径,在机器人起点和终点之间得到一条能够有效避障且距离最短的行驶路径。在实验验证中也证明了方法的可行性和有效性,但是由于时间关系的限制,在实验中障碍物环境比较简单,并且仅仅考虑了机器人的直线行走,在今后的研究中,需要对算法方面进行优化,测试复杂环境,并将机器人在运行过程中的曲线运动考虑进去,在本文方法的基础上进行优化。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:02
动漫界·幼教365(中班)(2020年3期)2020-04-20 11:03:27
铁道通信信号(2020年9期)2020-02-06 09:15:54
中国交通信息化(2019年2期)2019-03-25 03:20:16
电子制作(2018年17期)2018-09-28 01:56:44
通信电源技术(2018年5期)2018-08-23 01:15:36
中国交通信息化(2015年10期)2015-06-06 06:39:32
现代防御技术(2014年6期)2014-02-28 18:26:29
华东理工大学学报(自然科学版)(2014年1期)2014-02-27 13:48:36
