基于运动控制卡和视觉系统的桁架机械手分拣系统的应用
2021-02-21 07:47耿青玲
机械工程师 2021年2期
耿青玲
(广东机电职业技术学院, 广州510515)
0 引言
试纸是保健市场上常见的用品之一,有着非常广阔的市场,特别是在糖尿病、艾滋病防护及其它病菌测试方面,就会有此类的试纸用品供应。目前试纸包装仍以手工为主,属于典型的劳动密集型行业。虽然市面上有一些半自动的机器设备来代替手工,但基本上没有出现全自动化的生产线,大部分工序依赖手工进行,存在生产效率低、生产不稳定、生产现场环境较差等现象。本文从企业的实际需求出发,设计了一套基于试纸包装生产线的智能分拣系统。
1 分拣机械手的结构组成
智能抓取机械手主要由三轴直线滑台、两轴旋转滑台、运动控制模块、图像识别模块、机械手真空吸盘模块及电气控制系统6个模块组成,智能抓取机械手的整体框架图如图1所示。
工业摄像头把采集到的相关数据传输到计算机上,利用计算机上的图像识别软件进行数据的处理和建立空间坐标系,并给出目标物体的空间坐标。计算机上的运动控制卡的程序,根据图像识别软件所得到的数据,进行相关函数及程序的运算,最终输出相关的信号。利用该信号来控制各轴的运动,并按系统设定的要求实现分拣和码放。

图1 整体框架图
运动控制卡安装在计算机上与计算机进行通信,并利用计算机进行编程。运动控制卡利用分线器把I/O 信号接口与外部元器件进行连接。摄像头利用计算机作为图像处理的载体,在计算机上安装视觉系统的软件(TouchFinder for PC),使用该软件进行图像的处理及数据的运算。
机械手工作的流程是:首先PC机通过向图像采集卡发出指令,控制CCD相机进行目标物图像信息的采集,获取图像信息后,经过PC机的计算和图像处理,得到目标位姿的信息,并计算出机械手的运动位姿,然后通过运动控制卡向驱动器发出脉冲指令,从而控制机械手运动到相应的位姿,整个流程如图2所示。
1)分拣装置的机械结构本体。3个轴的滑台按图3所示进行连接,三轴的电动机使用伺服电动机,能够准确控制各轴的运动及定位。三轴的驱动器与运动控制卡连接,使用运动控制卡进行控制。在三轴上设置一个三维的空间原点,作为该机构的原点。当运动控制卡得到每个轴应该走多少个脉冲的数据时,通过程序处理该数据,把对应的脉冲发送到各轴所对应的驱动器上,让各轴的驱动器驱动轴的运动。
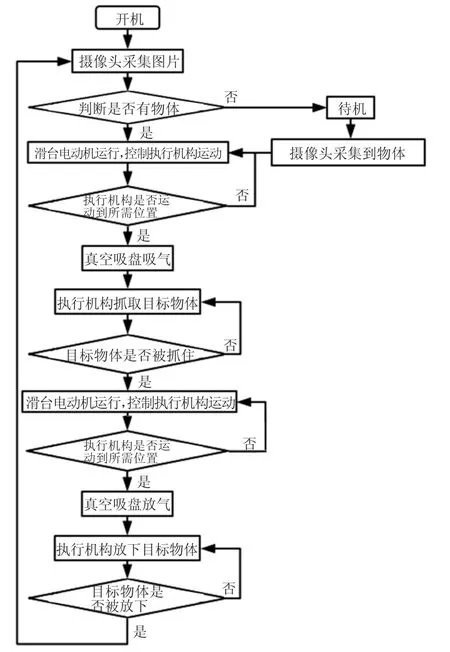
图2 机械手工作流程
2)分拣装置的运动控制卡。DMC1000 系列运动控制卡是雷赛智能推出的编程简单、功能丰富的PCI总线运动控制卡。可实现伺服或步进电动机的控制,利用雷赛运动控制卡提供的MOTION1000 调试软件,无需编程即可测试控制卡硬件接口和运动功能。同时该系列产品配备有Windows系统下的动态链接、丰富的函数库,用户只需编写简单的控制程序调用函数库中的相关运动控制函数,就可以对多轴自动化设备进行精确、高速、协调的控制。

图3 分拣装置机械结构
3)分拣装置的视觉系统。工业摄像头是视觉系统的主要部分,工业摄像头在该智能机械手中,担任把外界的信息转换成可以被处理器识别的数据的重任。因此工业摄像头的选型很重要,会影响到物体的识别、颜色的判断、物体位置精度等功能。在该设计项目中所选用的是欧姆龙FQ2-S45010F-M智能相机,智能相机与计算机通过TCP协议进行通信。
2 分拣机械手电路设计
1)气动控制系统主要是控制真空发生器通断气源气体,从而为真空吸盘提供真空,通过一个二位三通的电磁阀来实现,其连接图如图4所示。
2)X、Y、Z三轴的伺服驱动器电源采用220 V的单相交流电,而步进驱动器采用24 V的直流电作为驱动器的电源,可由开关电源得到24 V的直流电,具体电路设计如图5所示[1]。

图4 气动系统设计图
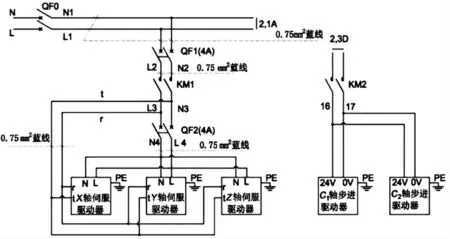
图5 驱动器控制系统设计图
3)各轴驱动器运动控制接线图。由于X/Y/Z三轴的驱动器控制接线图类似,在此以X轴为例进行说明。图6中包含X轴伺服驱动器与编码器的接线和X轴正限位、负限位和零点的接线说明[1]。
4)运动控制卡IO接口信号说明。图7中包含了对各个轴选择、方向选择,以及启动、停止、急停等输入开关信号的线路设计[1]。
3 分拣机械手的软件设计
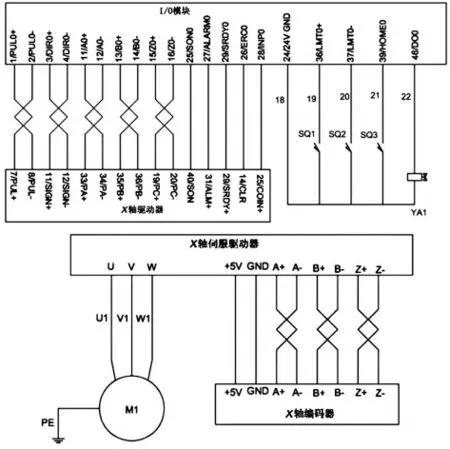
图6 X轴驱动器运动控制接线图

图7 运动控制卡IO接口电路

图8 智能相机与计算机通信流程
计算机与智能相机之间的通信流程如图8所示[2]。图像识别模块主要由视觉光源、工业相机、视觉软件组成。照明光源作为视觉系统输入的重要部件,它的好坏直接影响输入数据的质量和应用效果。而视觉软件是以计算机作为载体,执行图像处理,对图像数据进行复杂的计算和处理,最终得到系统设计所需要的信息,然后通过与之相连接的外部设备输出检测结果。本文主要用到的视觉软件是TouchFinder for PC,它是欧姆龙公司开发的一套标准机器视觉算法软件,包含图像预处理、图像拼接、图像标定、视觉定位、测量,具体处理过程如下[3]:
1)打开视觉软件TouchFinder for PC点击连接到传感器,在传感器设定-网络界面可以设定传感器所在的IP地址。
2)校准设定,在TouchFinder for PC软件中将传感器拍摄的坐标点与标度尺上的坐标进行标度变换,将标度变换后位置信息传输给计算机[3]。
3)使用欧姆龙视觉传感器的形状分拣功能,将需要处理的试纸形状设定好,然后将这些项目通过演算公式进行关联,在演算公式0中,根据以下格式编辑输入:(I0.JG+1)*I0.X,表示得到物料的X坐标,Y坐标和角度的演算公式编辑方法与此类似。
4)反复调试,观察视觉软件的图像采集画面是否能准确识别。
在欧姆龙视觉传感器获得试纸的位置信息后,将获得的坐标信息以8位字符的格式解析出来,作为后续控制各轴运动的位置信息,具体解析过程如下[4]:

然后,在C++编程界面中,通过调用运动控制API函数库,驱动机械手运动到对应的位置抓取试纸,并按照预定的位置摆放整齐,最终的效果图如图9所示。
图9 最终分拣实现效果图
4 结语
随着现代装备制造业的转型升级及现有劳动力成本的逐渐增加,设计了应用于试纸包装产业的智能分拣机械手,通过此智能分拣机械手的设计为企业节约劳动力成本和提高产品分拣效率,实现高效、节能、安全地分拣。随着工业4.0的不断推进、机器人及机器视觉的迅速发展,机器人(机械手)与视觉结合得越来越紧密,机器人越来越智能化[4],基于机器视觉技术的自动控制技术在现代化生产中己经发挥出巨大的作用,在以后的工作中将会朝着这一方向继续努力。
猜你喜欢
机电工程技术(2022年8期)2022-09-22
电脑爱好者(2020年6期)2020-05-26
保健与生活(2020年2期)2020-02-11
科技创新与应用(2019年32期)2019-12-02
妇女之友(2017年7期)2017-10-24
制造技术与机床(2017年3期)2017-06-23
光学精密工程(2016年5期)2016-11-07
上海电机学院学报(2015年3期)2015-02-28
西安交通大学学报(2014年7期)2014-04-16
电视技术(2013年11期)2013-07-25