一种水面舰船惯性导航系统实船测量方案设计
2021-02-18 07:43:54魏学通郁聪冲温朝江
导航与控制 2021年6期
魏学通,郁聪冲,温朝江
(92941部队43分队,葫芦岛 125001)
0 引言
位置、航向、水平姿态和速度精度是水面舰船惯性导航系统的关键指标,为水面舰船的指挥控制、武器系统和舰载机起降提供必需的信息支撑[1]。对于惯性导航系统实船测量,在诸多保障条件中,最为突出的是测控系统,对惯性导航系统主要输出参数的误差进行实时动态测量,它是测量信息获取的核心保证手段。实时采集惯性导航系统和测量设备的输出信息,给出惯性导航系统输出参数的瞬时误差,如位置误差、航向误差、水平姿态误差和其他误差,对惯性导航系统进行评价[2⁃3]。 目前,测量手段仅能实现对位置、 速度精度的测量,而无法完成对航向、水平姿态等其他重要指标的测量[2⁃5]。 为满足水面舰船惯性导航系统航向、水平姿态等重要指标的实船考核需求,本文根据多型舰船惯性导航系统实船安装特点设计了一种适装性好的航向和姿态实船测量方案,并对测量设备的构建和加装进行了论证设计,对测量设备标称的性能指标介于被试品1~3倍性能指标情况下的航向和水平姿态误差数据处理方法进行了研究设计,为水面舰船惯性导航系统导航参数的全面实船测量提供技术支撑。
1 测量设备实船加装方案设计
1.1 实船安装特点对测量设备加装的影响分析
惯性导航系统是具有零位对准要求的高精度导航设备,其位置、航向和水平姿态均具有起始零位。因此设备装船时,具有零位基准的设备(如惯性平台、监控器平台)安装在首尾线上。惯性导航系统的主要配套设备(包括惯性平台、控制机柜、电源机柜、监控器)一般就近配置,避免电缆过长信号衰减或受到干扰。测量载体的首尾线(方位)基准和水平基准平台在造船时一并给出。水平基准平台的给出相对比较容易,在舰船坐墩期间,将在车间加工好的水平基准平台直接在主龙骨上的适当部位垫平,用倾斜仪或合像水平仪进行测量,经过反复测试调整后用电焊机焊牢,技术人员通过刮、研等方法使其达到水平精度要求。水平基准平台的首尾线方向必须与载体的首尾线平行,测试时以便保证仪器使用精度。为了保证水平基准平台的使用寿命和精度,台子底部应加固并焊在主龙骨(总的基准平台)或肋骨(其他基准平台)上,且上部加防护罩避免摩擦和碰击。水平基准平台的水平精度应不低于1′(包括安装和加工精度)[2⁃3],其示意图如图 1 所示。

图1 水平基准平台示意图Fig.1 Schematic diagram of horizontal reference platform
水面舰船惯性导航系统实船测量主要考核定位精度、速度精度、航向精度、水平精度、角速度精度、授时精度及舰机对准能力等。其中,航向精度、水平精度和角速度精度的考核需通过加装测量设备来实现[6]。实船上的惯导舱室联合基座一般未预留加装位置,测量设备无法直接通过联合基座加装。因此,在设计加装方案时所选取的加装位置和采用的固定方式应最大限度减少船体变形对姿态测量结果的影响。同时,测量设备除必须满足精度指标要求外,还应具备体积小、质量小、便携式安装等物理特性。
1.2 测量设备加装设计方案
在水面舰船惯导舱室内,各惯性设备之间一般通过高强度联合基座固定安装,可以有效消除因船体变形造成的测量误差[4]。这种高强度联合基座具有较好的强度和刚度,可具备外部变形比较大的情况下基座体内部不发生形变或变化量较小的特性。考虑到多数情况下,舰船惯导舱室的联合基座不允许实施动火、钻孔及粘胶等安装措施,需通过其他手段进行测量设备的加装,并保证测量设备与惯性导航系统之间的角变形控制在可接受范围内。本文主要提出以下三种加装设计方案。
方案一:在惯性导航系统艏线方向的水平基准平台上加装过渡基座,用于安装姿态测量设备。过渡基座机械结构采用全铝制材料(约6.0kg),测量设备安装面研磨精度为Ⅱ级,平面度为32μm;水平基准面尺寸为130mm×60mm,研磨精度为Ⅰ级,平面度为16μm。加装结束后对真值测量设备与舱室内艏艉线及水平基准进行标校,将安装精度调整到规定范围内。
方案二:基于测量设备与惯性导航系统共基座安装的要求,依托惯性导航系统的安装基座,在其艉线方向加装过渡基座用于安装测量设备,过渡基座通过夹具夹持惯性导航系统安装基座加强筋,使其与被试惯导实现共基座刚性固联。机械结构采用全钢制材料,测量设备安装面研磨精度为Ⅱ级,平面度为32μm;水平基准面尺寸为130mm×60mm,研磨精度为Ⅰ级,平面度为16μm。加装结束后对真值测量设备与舱室内艏艉线及水平基准进行标校,将安装精度调整到规定范围内。
方案三:通过安装过渡板来实现测量设备的安装固定,将过渡板固定在联合基座上,测量设备通过紧固件固定在安装过渡板上。为最大程度降低联合基座和过渡板表面不平整及漆膜受压变形等客观因素对测量设备安装紧固效果的影响,在测量设备初次安装紧固后进行3~7天的应力释放,应力释放期间可视情况再次进行紧固件的紧固,以巩固结构安装强度,确保安装效果。过渡板与联合基座的安装固定可通过自制夹具锁紧在联合基座的边角上。过渡板机械结构采用全铝制材料(约6.0kg),测量设备安装面研磨精度为Ⅱ级,平面度为32μm;水平基准面尺寸为130mm×60mm,研磨精度为Ⅰ级,平面度为16μm。加装结束后对真值测量设备与舱室内艏艉线及水平基准进行标校,将安装精度调整到规定范围内。
在海上实际使用环境下,各设备会随着舰船运动产生不规律的震动和摇晃,方案三中 “使用自制夹具和紧固件来固定过渡板和测量设备”的方式难以保证测量设备与过渡板在使用过程中不产生位置偏移,进而导致测量误差增大而影响测量结果;方案二能够满足测量设备与被试设备共基座的安装要求,能够最大限度消除船体变形对姿态测量精度的影响,但过渡基座需要与被试惯导基座加强筋固联,其尺寸规格应严格按照被试惯导基座规格进行设计生产,无法在其他型号舰船上通用;方案一中测量设备虽然未与被试惯导共基座安装,但一般情况下惯导舱室内的水平基准安装基座与惯导设备距离较近,且均安装在刚性较好的舰船龙骨结构上,在测量过程中因船体变形产生的误差较小(可忽略不计),过渡基座结构设计简单,通用性较好。因此,在三种加装方案中,方案一可行性最佳,应优先选择。采用方案一将测量设备通过过渡基座安装在水平基准台上,测量设备应具备体积小、质量小的特性。因此,选择光纤陀螺惯导作为测量设备更加合理可行。
1.3 测量设备构建
测量设备主要提供航向、横摇、纵摇等姿态真值信息,测量设备选用质量小、启动快、精度高的光纤陀螺惯导,光纤陀螺惯导采用卫导组合工作模式。
在舰船惯导舱室内,在惯性导航系统艏线方向的水平基准平台上加装过渡基座,用于安装测量设备。过渡基座机械结构采用全铝制材料(约6.0kg),测量设备安装面研磨精度为Ⅱ级,平面度为32μm,水平基准面研磨精度为Ⅰ级,平面度为16μm。测量设备安装基座示意图如图2所示。
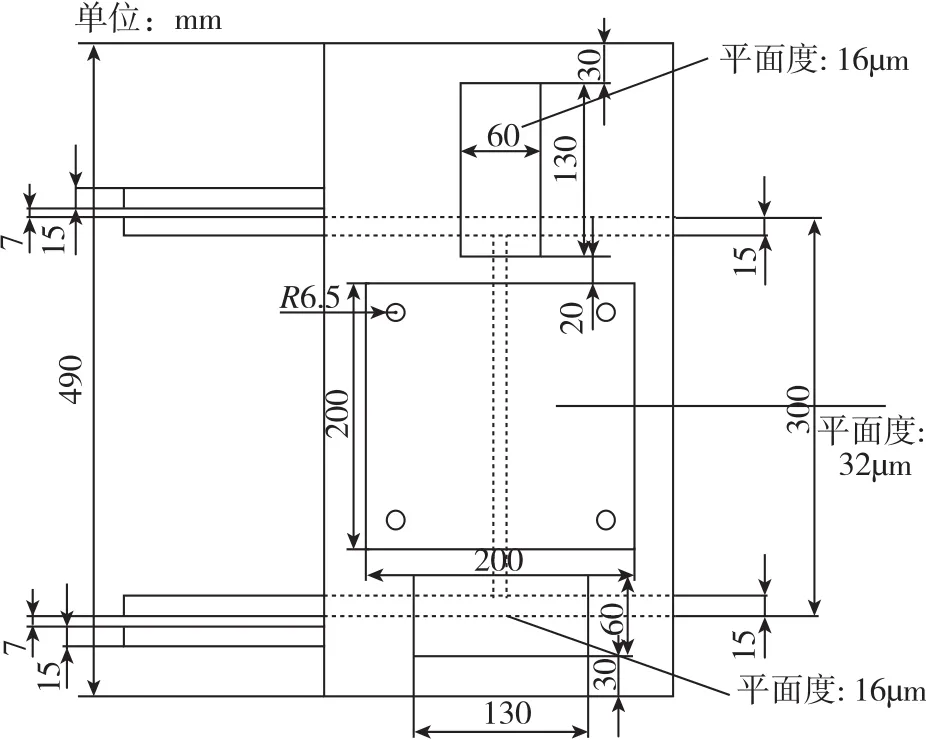
图2 测量设备安装基座示意图Fig.2 Schematic diagram of measurement equipment installation base
2 实船测量中航向和水平姿态数据处理方法设计
2.1 数据处理方法设计
测量设备用来精确测量载舰的位置、航向、摇摆角、速度、角速度等参数,实时录取惯性导航系统的输出参数和测量设备的测量信息,为评价惯性导航系统战术技术性能和作战使用性能提供依据。测量设备的核心是舰船坐标参数的测量和数据的实时、同步采集,载舰坐标参数测量则包括位置测量、三维姿态角测量、角速度测量以及速度测量。数据录取设备用来进行惯性导航系统与真值测量设备参数的实时采集,要求实时性强、同步精度高,通过实时给出的参数误差数据、误差曲线,可以表征惯性导航系统的误差特性,数据的事后处理则是在对测量数据进行全面分析,并对奇异点数据剔除后进行误差统计,从而更真实地反映系统的性能。
本文测量方案选用质量小、启动快、精度高的光纤陀螺惯导(卫导组合)作为测量设备,测量设备的性能指标均应高于惯性导航系统的性能指标。对惯性导航系统进行考核,惯性导航系统的位置精度、速度精度、航向精度、水平姿态精度等测量方法和测量项目按相关规定执行,这里不再赘述。
2.2 航向和水平姿态误差数据处理方法
一般测量设备性能指标应高于惯性导航系统性能指标三倍以上[7⁃9]。 针对测量设备标称的性能指标达不到惯性导航系统性能指标三倍以上但高于惯性导航系统性能指标情况,本文提出了相应的航向误差数据处理方法和水平姿态误差数据处理方法[10]。
(1)航向误差数据处理方法
1)当测量设备与惯性导航系统的航向角都比真航向角偏大或都比真航向角偏小时,数据处理方法如下
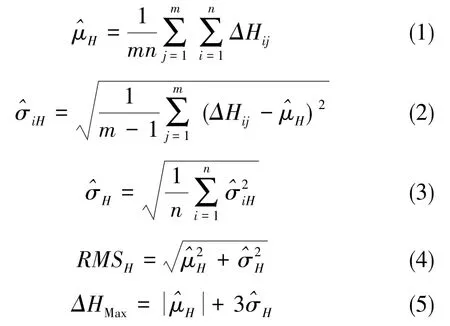
式(1)~式(5)中,m为有效测量航次数,n为每个航次的测点数,为艏向角误差的均值,ΔHij为第j航次第i测点的艏向角误差值,为各航次第i测点的艏向角误差的标准差,为艏向角误差的标准差,RMSH为艏向角均方根误差,ΔHMax为艏向角误差最大值。
2)当测量设备与惯性导航系统的航向角其中一个比真航向角偏大而另一个比真航向角偏小时,数据处理方法如下


式(6)~式(10)中,m为有效测量航次数,n为每个航次的测点数,Δhij为第j航次第i测点的艏向角误差值,为各航次第i测点的艏向角误差的标准差,为艏向误差的标准差,RMShc为测量仪器的艏向角测量误差(指测量仪器精度指标),RMSh为艏向角均方根误差,ΔYhmax为艏向角误差最大值。
凡惯性导航系统航向误差统计值在研制总要求(或合同书)规定的技术指标范围内(即小于或等于)的,即认为合格。
(2)水平姿态误差数据处理方法
1)当测量设备与惯性导航系统的横摇角或纵摇角都比横摇或纵摇真值偏大或偏小时,数据处理方法如下
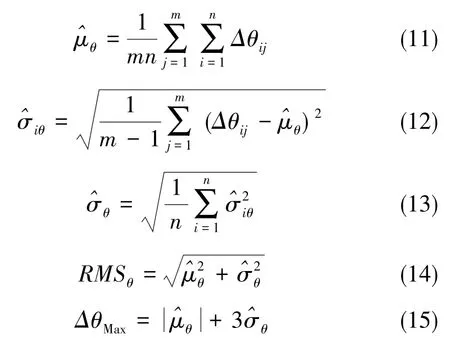
式(11)~式(15)中,m为有效测量航次数,n为每个航次的测点数,为横摇或纵摇误差的均值估计值,Δθij为第j航次第i测点的横摇或纵摇误差值,为各航次第i测点的横摇或纵摇误差的标准差,为横摇或纵摇误差的标准差,RMSθ为横摇或纵摇均方根误差,ΔθMax为横摇或纵摇误差最大值。
2)当测量设备与惯性导航系统的横摇角或纵摇角其中一个比真横摇角或真纵摇角偏大而另一个比真横摇角或真纵摇角偏小时,数据处理方法如下

式(16)~式(20)中,m为有效测量航次数,n为每个航次的测点数,为横摇或纵摇误差的均值估计值,为第j航次第i测点的横摇或纵摇误差,为各航次第i测点的横摇或纵摇误差的标准差,为横摇或纵摇误差的标准差,为测量仪器的横摇或纵摇测量误差(指测量仪器精度指标),RMSθ′为横摇或纵摇均方根误差,为横摇或纵摇误差最大值。
凡惯性导航系统水平姿态误差统计值在研制总要求(或合同书)规定的技术指标范围内(即小于或等于)的,即认为合格。
2.3 仿真结果与分析
以航向误差为例,对2.2节中数据处理方法的可行性进行仿真验证,设定被试惯导航向精度指标为≤a(RMS)、 ≤2a(Max)。 前期,利用性能指标高于被试惯导性能指标三倍以上的测试设备对被试惯导进行测试,已测出的4套被试样机实际航向精度为:1号机≤0.8a(RMS)、≤1.6a(Max),2号机≤0.9a(RMS)、 ≤1.8a(Max),3 号机≤1.1a(RMS)、 ≤2.2a(Max),4 号机≤1.2a(RMS)、 ≤2.4a(Max);测量仪器航向精度为≤0.5a(RMS)、 ≤a(Max)。
各样机均进行1000次仿真测试,每次测试做500个样本,各样本时长为30min。按照测量设备和各样机实际精度仿真生成测试数据,各样本中同一序号测点的误差符合正态分布,根据实际精度计算的各设备正态分布参数如表1所示。
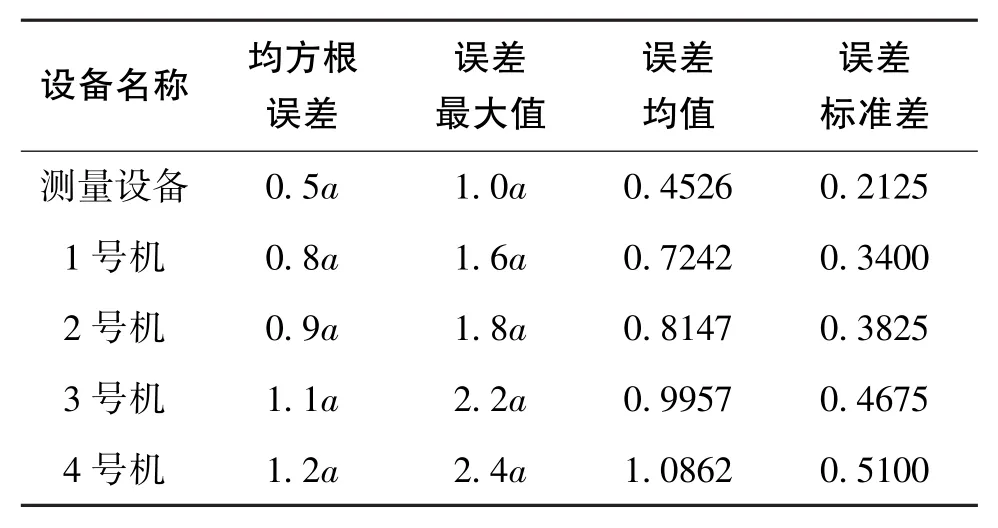
表1 测试和被试设备的误差及正态分布参数Table 1 Error and normal distribution parameters of test and tested equipments
利用仿真数据,按照测试设备和被试样机的航向值在真航向值同侧和两侧两种情况分别进行仿真数据误差统计,各样机误差统计结果如图3~图6所示。
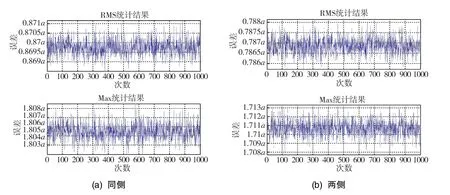
图3 1号机仿真结果统计Fig.3 Simulation result statistics of 1sttested equipment
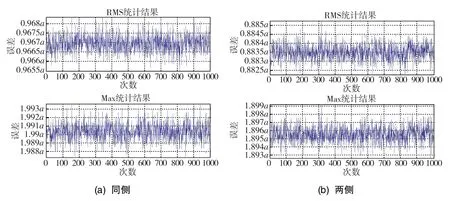
图4 2号机仿真结果统计Fig.4 Simulation result statistics of 2ndtested equipment

图5 3号机仿真结果统计Fig.5 Simulation result statistics of 3rdtested equipment

图6 4号机仿真结果统计Fig.6 Simulation result statistics of 4thtested equipment
由仿真结果可知,本文数据处理方法得到的误差统计结果与前期采用性能指标高于被试惯导性能指标三倍以上测试设备所得到的实际测试结果基本一致,可以据此判定被试惯导是否符合指标要求,从而证实了本文中航向和水平姿态测试数据处理方法的合理性和可行性。
3 结论
本文基于水面舰船惯性导航系统测量需求,通过分析惯性导航系统实船安装特点,提出了一种适装性较好的测量方案。同时,也对测量设备性能指标达不到惯性导航系统性能指标三倍以上但高于惯性导航系统性能指标情况下的航向误差数据处理方法、水平姿态误差数据处理方法进行了研究设计。仿真结果表明:数据方法合理可行,可为水面舰船惯性导航系统实船测量提供支撑,具有很好的推广应用价值。
猜你喜欢
军民两用技术与产品(2021年7期)2021-10-13 08:12:10
防爆电机(2021年2期)2021-06-09 08:14:48
石油沥青(2021年1期)2021-04-13 01:31:08
湖北农机化(2020年4期)2020-07-24 09:07:44
模具制造(2019年7期)2019-09-25 07:30:00
船舶标准化工程师(2019年4期)2019-07-24 07:21:16
制冷技术(2016年4期)2016-08-21 12:40:30
测绘科学与工程(2016年4期)2016-04-17 06:51:14
中国惯性技术学报(2015年1期)2015-12-19 13:11:49
电测与仪表(2014年16期)2014-04-22 05:20:20