海洋无人小型平台惯性/水声组合导航技术
2021-02-18 07:43韩若曦李海兵郭子伟
导航与控制 2021年6期
韩若曦,李海兵,郭子伟,罗 骋
(1.青岛海洋科学与技术试点国家实验室,青岛 266237;2.北京航天控制仪器研究所,北京 100039)
0 引言
随着水下小型无人平台的快速发展,海洋开发领域呈现出广阔的前景。纵观全球,海洋科技的较量也是综合国力的较量,而导航定位技术作为水下小型无人平台的关键技术,一方面影响着我国海洋经济的发展,一方面也与水下攻防、领海安全息息相关,成为现阶段发展水下小型无人平台的研究热点。
世界各国对水下无人小型平台的导航定位规划重视程度逐渐增加,美国国防高级研究计划局(Defense Advanced Research Projects Agency,DAR⁃PA)于2017年投资研发 “深海定位导航系统”[1],以确保水下平台的安全性和定位的快速准确性。此外,根据美国曾发布的多版 《无人水下航行器总体规划》及 《无人系统发展路线图》可以看出,以惯性导航和声学导航为主、航位推算和地球物理导航等方式为辅的组合导航技术仍是未来水下无人小型平台所采用的主要导航方式[2]。随着我国“海洋强国”战略的实施,海洋工程和水下建设需求的增加与水下导航定位技术的发展相辅相成、双轮驱动。但应意识到,目前我国水下无人小型平台的导航定位技术与手段仍与世界先进水平存在显著差距,难以胜任某些海洋开发及探测任务,而引进国外技术与产品则要面临价格高昂、时效性差、技术封锁以及维护困难等多重问题,因此大力发展完全自主知识产权的高性能水下无人小型平台导航定位技术具有深远意义。
1 海洋无人小型平台导航系统现状
1.1 概述
水下环境十分复杂,海洋无人小型平台对导航系统的隐蔽性、实时性等需求逐步提升,这些因素导致单一的导航系统早已无法胜任作业要求。惯性导航系统(Inertial Navigation System,INS)会随时间产生累积误差,因此需依据辅助导航信息来抑制INS的漂移,提高导航定位精度。随着微处理器计算能力与陀螺仪技术的进步,捷联式惯性导航系统(Strapdown Inertial Navigation System,SINS)因体积小、质量小、成本低、维护方便,正成为当今水下导航设备的应用主流。目前,海洋无人小型平台主要采取INS与水声定位系统、多普勒计程仪(Doppler Velocity Log,DVL)结合的组合导航方式,图1给出了水下惯性/声学组合导航系统示意图。
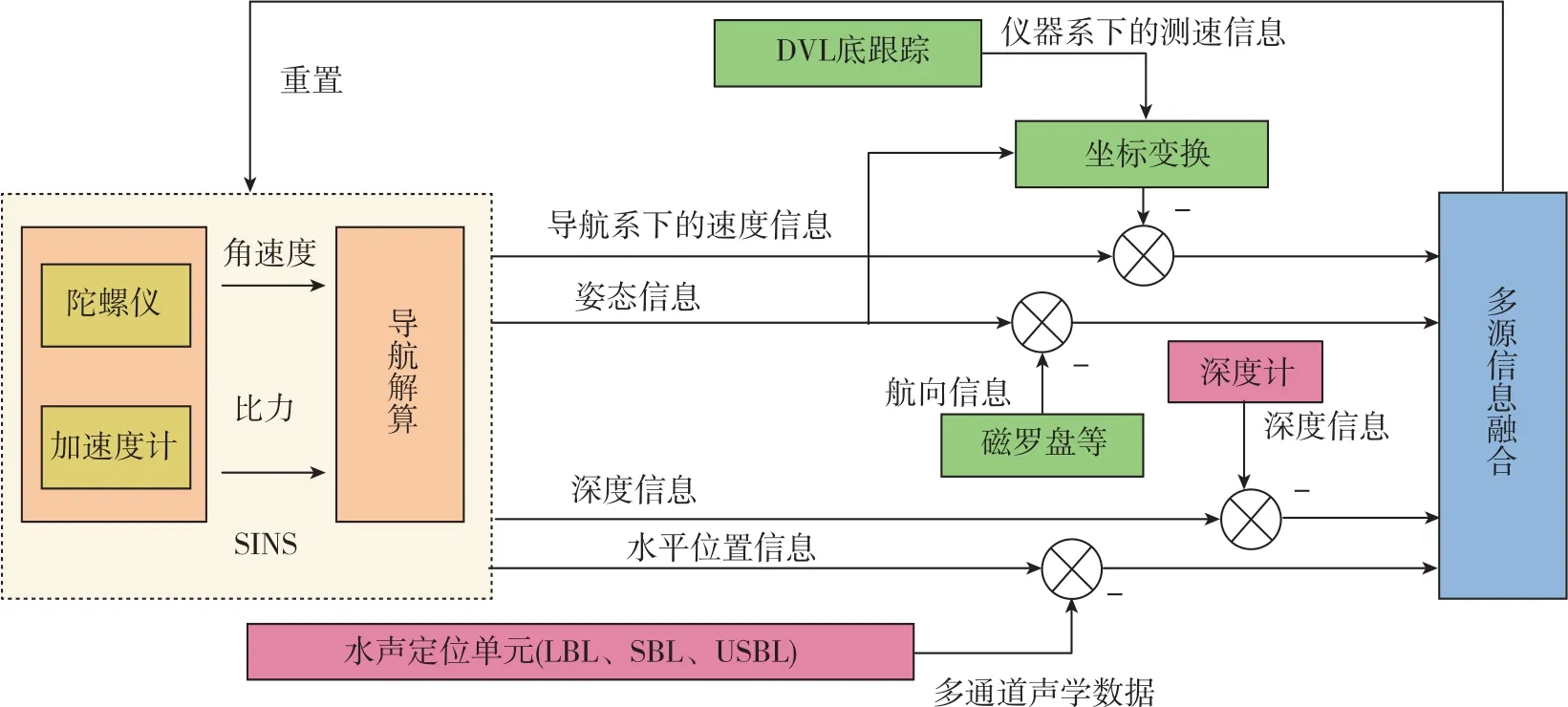
图1 水下惯性/声学组合导航系统示意图Fig.1 Schematic diagram of inertial/underwater acoustic integrated navigation system
DVL测速信息及水声定位单元提供的实时声速信息、声学数据与SINS提供的导航解算信息进行融合处理,输出导航定位信息并实时更新来对系统进行校正。在惯性导航系统中引入水下可用信号,充分发挥各测量仪器的优势,以实现高效、自主、隐蔽的高性能水下导航定位。
1.2 水下无人小型平台组合导航技术国外现状
水下无人小型平台具有降低平台全寿命费用和减少人员伤亡等多方面优势,可以完成复杂的水下任务,水下导航与定位技术作为保证其精准完成任务的关键环节,在欧美等国家中较早展开研究。随着传感器精度的提升及声学定位技术的发展,INS/水声组合导航技术也在迅速发展。水下声学定位包括超短基线定位(Ultra⁃short Baseline,USBL)、 短基线定位(Short Baseline,SBL)与长基线定位(Long Baseline,LBL)三种方式,借助水声为INS提供校准信息;利用多普勒测速仪(Doppler Velocity Log,DVL),可测量无人平台相对海底的速度,可与磁罗盘、倾角仪等设备配合以提高精度。国际上,水下无人小型平台常用 SINS/DVL、 SINS/LBL、 SBL、USBL几种导航方式,表1、表2分别给出了典型国外水下无人小型平台应用的导航系统或代表产品。
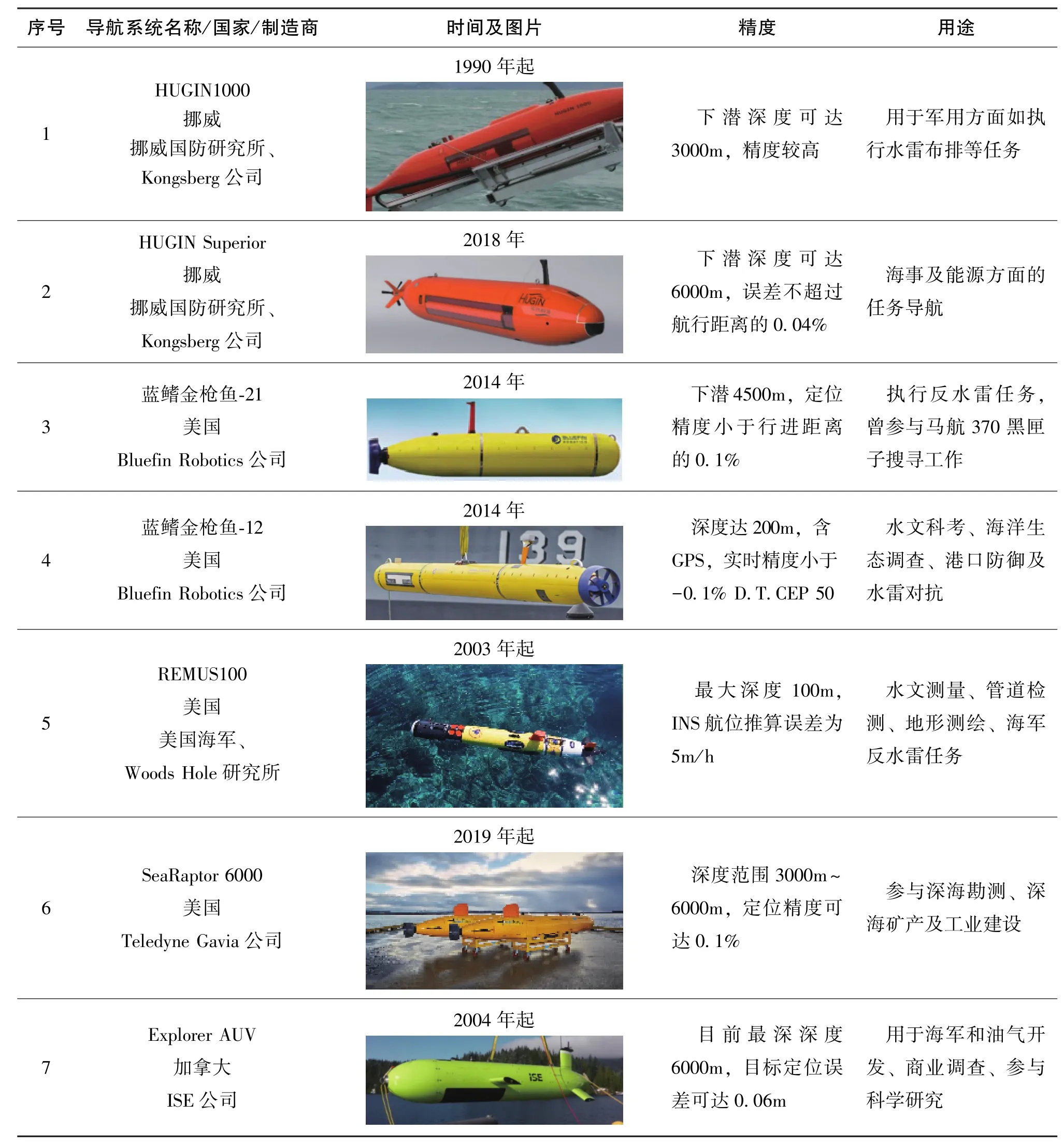
表1 国外SINS/DVL导航系统产品Table 1 Products of SINS/DVL navigation system abroad
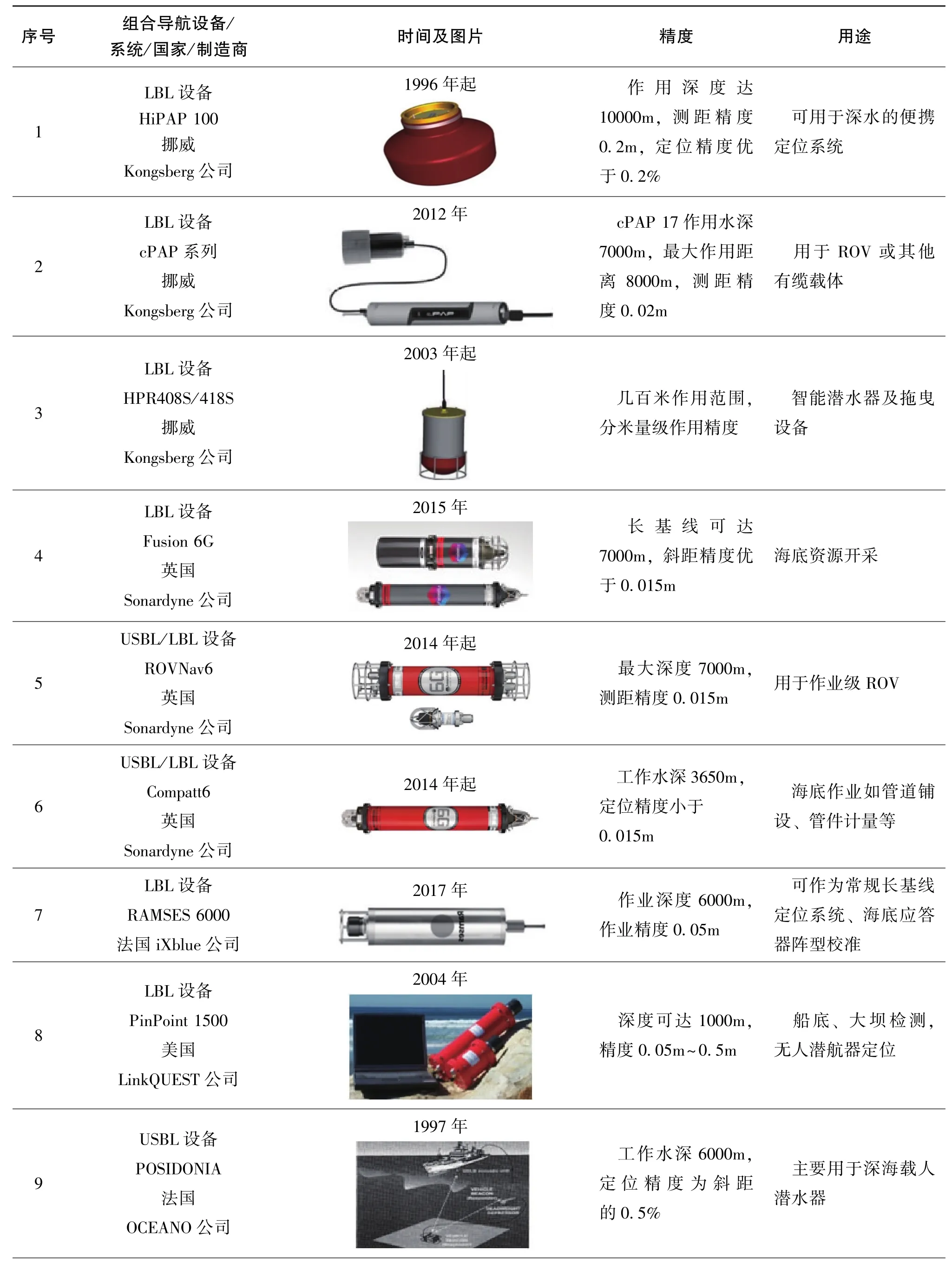
表2 国外用于SINS/声学导航系统的设备及平台Table 2 Equipments and platforms for SINS/acoustic navigation system abroad
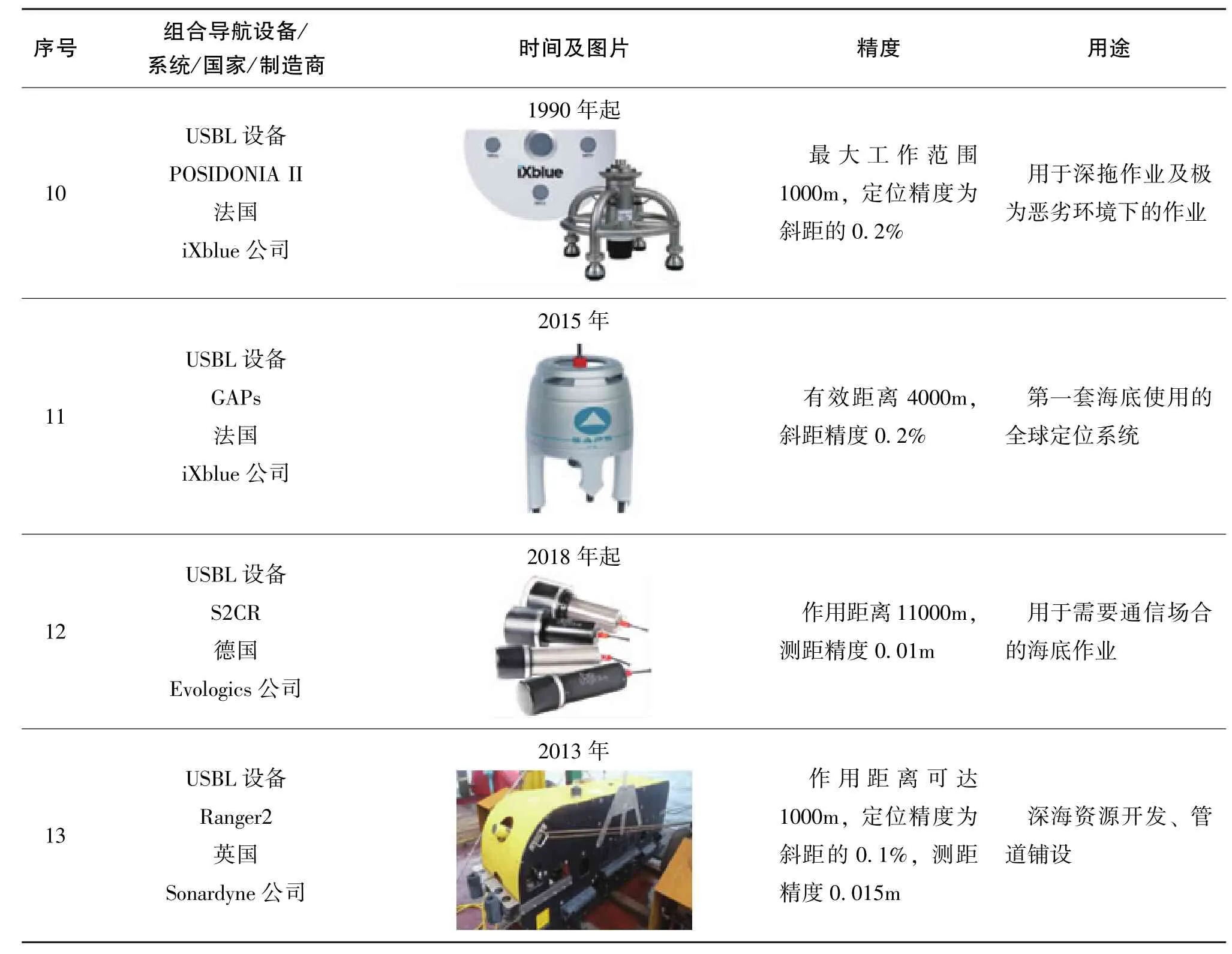
续表
由表1、表2可知,水下无人平台大多用到INS、DVL与LBL、USBL等几种导航方式的组合,其在长航时工况下会出现累积误差,有时需要上浮校准,因此隐蔽性难以满足。诸多国家为此不断深入对水下组合导航技术的进一步研究,除表中产品外,美国亚特兰大大学研发了水下机器人,其导航方式包括INS、DVL和全球导航卫星系统(Global Navigation Satellite System,GNSS)辅助导航。加拿大国防部研发的自主无人潜航器(Autono⁃mous Underwater Vehicle,AUV)将 INS、 声学自动搜寻装置、DVL及压力传感器进行组合,可提高导航定位精度。对于浅海作业的AUV,其作业深度为几百米,且航行时间要求较短,一般为10h左右,因此可以在INS基础上结合声学导航并辅以GNSS来修正误差;对于深海作业的AUV,需要数十小时在水下几千米的区域进行作业,对导航系统体积限制较小,而对其精度和隐蔽性要求较高,往往以INS为主辅以DVL或罗经等来修正误差;对于极端环境下的潜航器如俄罗斯的“GLONASS”,则在特定海域进行有缆校准。
1.3 水下无人小型平台组合导航技术国内现状
我国海洋水下无人小型平台的导航定位技术在过去20多年里取得了一定的进展,表3给出了我国主要水下无人小型平台导航系统介绍。
由表3可知,国内组合导航平台以声学导航、惯性组合导航最为常见,在常规应用方面的技术也趋近成熟,但大部分水下无人平台仍采用国外导航系统,仅少数为国内产品。其中,西北工业大学与天和海防等单位共同研制的 “中国无影”小型潜航器可实现高精度的自主导航,并在无人潜航器的定深控制技术、应急避险控制、组合导航等方面实现了一定的技术突破。另外,在 “十五”期间,我国自行研制出了一系列长程USBL定位系统,定位深度接近4000m[3]。在INS/水声组合导航方面,西安自动控制研究所自主研发了SINS/DVL组合导航系统,其精度在一般工况下的偏差可达到航程的0.3%[4];中国科学院声学研究所东海站先后设计了水下拖体航迹测量方法及一系列水声定位改进算法[5];哈尔滨工程大学的刘伯胜等在 《水声学原理》中的研究为声纳的进一步发展打下基础,哈尔滨工程大学水下机器人技术重点实验室在深海AUV的长航时高精度导航方面也积累了丰富经验;自2010年以来,厦门大学致力于水声传感网络定位及水声定位中时延估计等[6]问题的研究,提高了水声传感网络的传输性能和水声定位信号的处理效果[7];中国船舶重工集团公司第七一2研究所和第七一五研究所分别对水下定位浮标系统和信标装置[8]、水声定位校准及波束形成算法[9]、 基于 GNSS 的水下立体定位系统[10]等展开了一系列研究,显著提高了波束形成的分辨率和水下定位效率;海洋水下小型无人平台导航定位技术的集成也在逐步进展中,中国舰船研究设计中心的谢伟等对水下攻防的感知与协同导航进行了一系列研究,为我国未来水下导航装备建设提供理论参考[11]。结合杨元喜院士团队对水下导航定位技术的一系列研究[3]可知,我国现行的水下导航定位技术可以满足海洋水下小型无人平台的基础作业定位精度要求,但对更多的海洋数据采集和更多的导航任务则需进一步提高水下导航定位系统的性能。
2 水下无人小型平台惯性/水声导航关键技术
从INS与水声定位技术现状和水下无人小型平台的应用需求来看,水下导航与定位技术仍将以惯性导航和水声导航为主、其他导航方式为辅。因此,大力发展以惯性/声学组合导航系统为主的方式,对提升自主研发能力仍具有重要的意义。惯性/声学组合导航中的关键技术主要包括初始对准、声线修正、守时与授时及信息融合技术等几个方面。
2.1 水下惯性导航初始对准技术
导航计算机通过初始对准来获得正确的初始条件,包括初始速度及位置。水下工况的复杂性要求系统具备足够的快速性、鲁棒性,能够持续高效地为后续姿态更新提供条件。传统的两阶段对准为:先进行粗对准,后进行精对准。对于粗对准,目前可采用四元数法和凝固法,二者精度相似且已接近理论水平,因此其主要提升空间在于精对准过程。
进行地面(静基座)对准时,INS为线性定常系统,可观测性更容易分析,可实现快速对准。但对于多数采用SINS的水下无人小型平台,因其行进速度和角速度处于不断变化中,故需进行非线性初始对准。现行的处理方法有基于确定性策略的Sigma点非线性滤波方法,典型方法有无迹Kal⁃man滤波算法,其难点在处理非线性函数的高斯积分。此外,还有基于逼近随机变量的概率分布方法来处理非线性滤波,用于SINS初始对准过程,目前已有大量文献验证。非线性滤波对准需要面对的另一大问题是模型可观测性分析,针对SINS的非线性对准模型,可运用解析方法,根据有限长度区间的量测信息求解状态初值[12]。对于小型舰船类无人平台,基于微电子机械系统(Micro Electro Mechanical Systems,MEMS)的 SINS 组合导航技术的需求逐渐增加,而传统动基座初始对准技术使用在MEMS系统上会造成较大误差,现有方法可结合运动学原理进行误差建模,进而实现两步对准;当系统转位机构精度较高时,可利用转位信息设计对准方案[13]。当前,基于MEMS的SINS技术正逐渐进入小型化、规模化的军民应用市场,其初始对准也将是水下导航定位技术的发展重心之一。
2.2 声线修正技术
对于水下声学定位系统来说,海水中声速的时空特性导致声波在传播过程中出现弯折,使得海水的传播路径呈现为极为复杂的多段折线,此时若直接利用整个海域的平均声速进行定位计算会产生很大偏差,因此需要声线修正来补偿定位误差。当前声线修正方法主要有查表法、代入公式计算法以及建立声线修正模型法。
20世纪60年代起,Vaas和Anderson等先后提出了基于Taylor级数的展开法和基于海水温度盐度压力的经验公式法对声速进行修正。之后,海洋科学家们相继提出了各种经验公式,分别适用于特定的条件和范围,具体如表4所示[14]。
经验公式局限于特定的环境要求,在应用中限制较多,学者们提出了预先根据特定海域参数建立声速表[15]的方法,但对于环境变化较大的海域有待进一步完善。20世纪以来,有效声速(Ef⁃fective Sound Velocity,ESV)概念被提出,之后衍生出ESV估计的一系列方法。针对前述海洋环境未知干扰问题,考虑更多的环境变量进行ESV估计可提升声线修正效果,但计算量较大。在浅海海域,利用静态观测值可基于最小二乘方法进行定位估计。近年来,智能算法发展迅速,将其用于ESV估计可提高计算效率。基于遗传算法进行优化,可有效提高ESV表的精度;基于粒子群方法来解算长基线定位系统的优化函数,其结果较传统算法更优,但以上方法目前仍停留在仿真阶段。国内专注于声线修正研究的有海军潜艇学院的朱海团队,其提出了基于水声传播时延补偿来修正INS/多信标水声测距定位误差[16],针对信标信号延迟或缺失等问题,基于异步量测序贯处理方法构建SINS/LBL组合导航计算模型,实时更新应答信号,补偿声速误差[17]。笪良龙团队通过研究潜航器所处的海洋环境,对特定海域声场环境[18]以及声学导航中存在的噪声如舰船噪声[19⁃20]等的特性进行讨论,分析其对导航定位的影响,设计方法以提升浅海声速剖面反演性能,改善了声速修正效果。孙芹东等通过研究浅海声场及海洋环境特征[21],设计方法改善了海洋环境观测浮标平台的探测性能。
2.3 守时与授时技术
守时与授时技术是发展国防和国民经济的重要因素,是时间同步的关键应用,对于水下小型无人平台导航定位而言十分重要。
(1)原子钟守时系统
由原子钟组构成的守时系统是制定工作标准的依据,实际应用中对守时系统的准确性、连续性、稳定性和可靠性都要求极高[22]。协调世界时(Universal Time Coordinated,UTC)是世界民用时的基础,国际计量局(The International Bureau of Wei⁃ghts and Measures,BIPM)为提供全球统一的实际参考基准收集了全世界70多个实验室约350台高精度原子钟的对比数据,建立并维持国际原子时(International Atomic Time,TAI),基于此,根据地球自转观测以及闰秒设置得到协调世界时UTC。我国的标准时间UTC(NTSC)由中国科学院国家授时中心(National Time Service Center,NTSC)产生和维护。UTC(NTSC)系统作为长、短波授时系统的核心部分,自1970年成立至今持续稳定运行,其守时综合性能目前也已跻身世界前列,成为国际原子时归算的最大权重单元之一。
北斗卫星的发展使得我国北斗系统(Beidou Navigation Satellite System,BDS)时间国际标准溯源关系得以建立,如图2所示,通过建立国内/国际对比链路可进行UTC、UTC(NTSC)和BDT之间的数据传递。
未来,TAI技术的进步也会极大改进UTC的性能[23]。
对于守时技术在导航定位方面的应用,多种卫星导航系统的兼容操作是需要深入的方向,将多个卫星导航系统结合,消除其相互干扰,可提升接收端的使用体验,且相比于总体成本并无明显提升。我国北斗与俄罗斯卫星导航系统的互操作将是未来全球卫星导航定位系统兼容应用的重点环节之一。
在水下导航方面,随着微电子技术的发展,芯片级原子钟(Chip Scale Atomic Clock,CSAC)因具有体积小、能耗低、适合微型化等优点,现已多用于水下环境中。作为超低功率的时频基准,CSAC能显著改善导航定位系统的机动性和鲁棒性,在无卫星信号但又需要精确时间同步和计时的环境中完成时间保持、通信和导航定位等任务。
(2)卫星授时技术
卫星授时技术是保障导航定位系统正常工作的关键支撑。使用卫星进行授时属于广域高精度的授时方式,包括基于通信卫星的授时技术和基于卫星导航系统的授时技术两类。
转发式和数字卫星授时是通信卫星授时的两种方式,转发式授时技术研究进展如表5[24⁃27]所示。
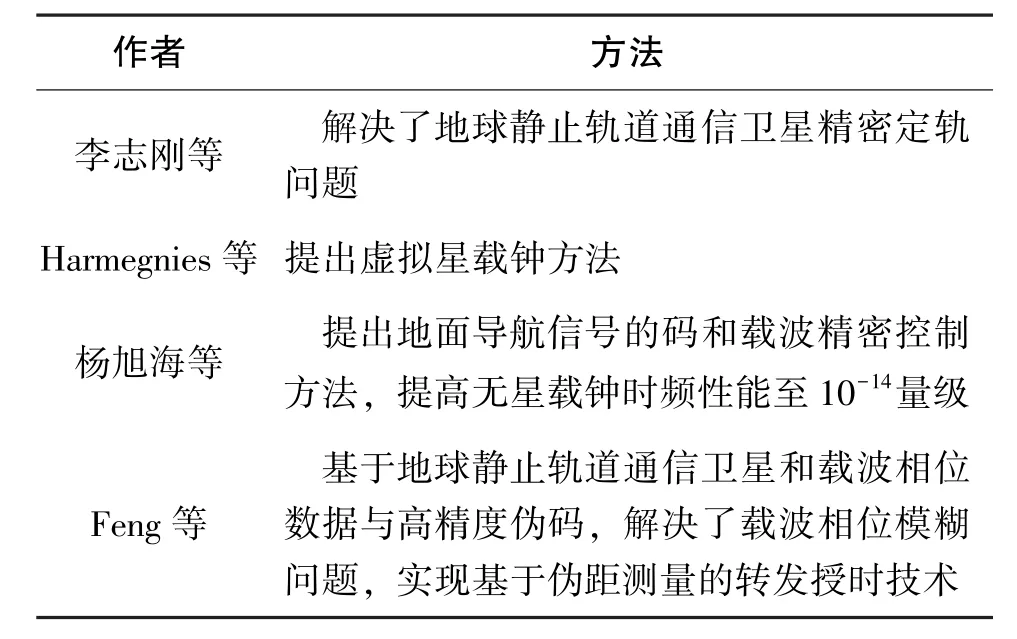
表5 转发式授时技术进展情况Table 5 Progress of repeater timing technology
转发式授时具有通信授时一体化、时频基准设备便于维护和导航信号灵活性更强的优势,可实现的远距离转发式授时精度为2ns~3ns[28]。由卫星电视信号进行标准时间发播来进行授时的技术为卫星电视授时技术,其上进行的试验结果表明,该技术的单向授时精度优于100ns,附加广域差分技术后授时精度可达20ns。
卫星导航系统授时技术包括GNSS标准授时、GNSS 精密单点定位(Point to Point Protocol,PPP)授时和基于共视原理的卫星授时。我国北斗卫星导航系统目前已具备标准的定位和授时功能,且在地球静止/倾斜同步轨道、中地球轨道及星载原子钟等方面[29⁃31]具有一定技术进展。 GNSS PPP 技术使用载波相位和伪距观测数据及高精度轨道和星钟差来进行PPP定位和授时[32]。随着北斗三号全面建成并展开服务,利用BDS开展的PPP授时与应用也在快速发展,NTSC研究人员先后提出利用共视原理和基于卫星导航系统的授时方案,前者可将卫星单向授时精度由20ns提高到3ns~5ns;后者基于BDS实现精密授时(Precise Time Service,PTS),再利用PPP时间传递方式给到用户,静态授时精度可达亚纳秒量级[33]。
守时与授时技术的发展提高了水下平台的导航定位性能,但也要意识到当前国内相关技术的不足,表现在:军用授时能力有限、单一系统授时能力不足、微型时钟技术发展缓慢及水下授时能力存在缺陷。对于水下导航来说,1ms的时间误差将导致约1500m/s×0.001s=1.5m的定位误差,且水声通信的主要特点是传播速度低,延迟且具有时变性,信号衰减严重,存在多径效应。对于水下无人小型平台来说,这都是需要解决的难点问题。
2.4 水下惯性组合导航信息融合技术
水下无人小型平台在执行任务的不同阶段时往往要在不同类型的组合导航方式之间进行切换,以多种导航方式实时传递的导航信息为基础,进行优化融合,实现高精度定位。其中,统计推断、估计理论和信息预处理是进行信息融合的重要手段,随着各种新型方法的出现与更新,水下INS组合导航系统的信息处理策略也在不断迭代。
(1)信息预处理技术
由于不同海域具有不同的特性,水下环境属于极其复杂的场景,海洋湍流和可能存在的空泡噪声,即各种水下生物的噪声、混响等都可能导致数据异常,因此需要进行数据融合前的预处理,常采用加权平均、最小二乘、小波变换等方法。
贾朗特等[34]对水下声波传播过程中的多径干扰效应展开了一系列研究,并提出了一种改进的有限脉冲响应(Finite Impulse Response,FIR)滤波方法,实验结果表明该方法优于递归滤波和小波滤波。为排除随机干扰,周佳加等[35]采用正交小波变换的快速算法对DVL量测数据进行了滤波,实验结果表明该算法可提高组合导航的精度。中国船舶重工集团公司第七一2所曾对水下无人小型平台的降噪方法进行研究[36],提出了一种改进的Surfacelet变换方法。中国海洋大学张洪进团队[37]对声呐数据进行预处理,使用稀疏化扩展信息滤波(Sparse Extended In⁃formation Filter,SEIF)进行实验,利用经过预处理的声呐数据,将SEIF与EKF的运算结果分别与GNSS对比,SEIF方法的定位误差较EKF减小了50%,可有效提高定位精度。
(2)估计理论及方法
20世纪,Wiener和Kalman先后提出Wiener滤波理论和Kalman滤波理论,开启了对状态估计理论的研究。状态估计方法现已成功运用到惯性组合导航的信息融合处理中,随着INS组合导航对状态估计方法需求的增加,后续开展了一系列研究。20世纪70年代末,Moore等基于Kalman滤波(Kalman Filter,KF)设计了扩展 Kalman 滤波(Ex⁃tended Kalman Filter,EKF)算法用于非线性系统,EKF运算速度快,易实现,但对强非线性特征可能滤波发散。在状态和测量噪声为高斯分布假设下,可采用由KF衍生的容积Kalman滤波(Cuba⁃ture Kalman Filter,CKF)、 无迹 Kalman 滤波(Un⁃scented Kalman Filter,UKF)以及 Gauss⁃Hermite 求积分 Kalman 滤波(Gauss⁃Hermite Quadrature Kalman filter,QKF)方法去近似非线性函数的后验分布;在状态和测量噪声为非高斯分布假设下,传统方法有高斯和滤波(Gaussian Sum Filter,GSF)算法以及基于随机抽样的粒子滤波算法(Particle Filter,PF),但由于计算步骤复杂、实时性较差,因此没有被广泛应用[38]。对于由DVL、USBL和航向姿态参考系统组成的水下无人平台组合导航系统,现有研究中,采用UKF方法进行处理可提高导航定位过程的抗干扰性,利用UKF方法可提高SINS/GPS/DVL组合导航校正估计精度,基于自适应滤波和强跟踪滤波的混合校正滤波方法可减少未知量测噪声对系统的影响。
(3)联邦滤波器
集中式和分散化滤波是利用Kalman方法对传感器数据进行融合的两种途径,前者利用一个滤波器来处理各子系统数据,理论上可给出系统误差估计最优解,但由于维数较高的系统实时性差,且当某个子系统出现故障时,会污染系统整体,因此容错性较差;后者在解决这些问题的基础上发展,典型分散化滤波方法为联邦滤波器,能够简化处理过程,更易得出全局最优或次优解。
惯性/声学组合导航系统易在水下环境中遇到问题,朱兵等[39]针对 SINS/DVL/AST(水声单应答器)系统中DVL测速信息和水声单应答器位置信息受高斯噪声污染的问题,提出了基于马氏距离的联邦鲁棒Kalman滤波算法,对信息分配系数进行自适应调整,从而提高了导航精度以及对AST输出信息的容错性。在处理水下机器人INS/GPS导航系统在行进过程中受到未知随机扰动的问题时,陈帅等[40]提出了基于置信检验自适应联邦Kalman滤波框架,并经实验验证了其良好效果。王磊等[41]将多模型估计引入到联邦滤波器中,结合多源导航传感器组合导航系统,建立了以INS为参考的导航系统误差模型,提高了水下无人平台INS组合导航系统的实时性、灵活性及容错能力。针对组合导航中的非线性问题,赖际舟等[42]改进了SINS/GPS/高度计组合导航信息处理方法,在Kal⁃man滤波中融入粒子滤波获取多维高斯分布的过程,以提高算法自适应能力。
3 水下无人小型平台惯性/水声组合导航应用需求分析
水下无人小型平台具有操作灵活、能耗较低、避免人员伤亡的优点,且能实现多平台协同工作,因此广泛应用于海洋资源探测、海洋搜救、水雷排布、海底管线排布、设备检修等工作中。目前,我国水下导航定位技术已可以满足以上常规应用,而对于水下侦察、目标跟踪、作战打击等方面的更高需求,现行技术无法充分满足。对于水下无人平台的导航定位系统,我国在研发、制造、服务等多个维度仍需依赖欧美等发达国家,水声定位技术与国际先进水平仍存在差距。惯性/声学导航技术的提升,有赖于近代数学、物理学、力学、光学、材料学、微电子技术及计算机技术的共同发展。
水下惯性组合导航系统的应用方向围绕水下无人平台的不同应用场景,体现出不同的需求特点:
1)用于海洋资源开发与地球环境保护的水下导航定位系统要求。占地球大部分面积的海洋仍有绝大部分待开发资源,这些资源也是人类未来生存的期望依托,经济社会的发展难免带来环境的恶化,而丰富的海洋资源一方面能带来更多的能源,另一方面还能改善和遏制资源枯竭与社会生产的矛盾,规避潜在风险。因此,对于水下导航定位技术要求就体现在长时间处于水下环境下的持续导航,以声学导航为主,一方面要求定位系统的布放回收便捷,减小运行成本和对海洋环境的污染;另一方面需要适应不同海域的复杂海况,可抵抗水下温度、深度、盐度的不同程度的干扰,具有较强的鲁棒性。此外,对于深海作业的平台,无法频繁上浮水面,因此辅助导航较多为以INS为主、声学及地磁或重力匹配为辅的组合导航方式,因而对于声线修正及声场相关算法的精度、匹配数据库分辨率具有较高要求。
2)用于深海搜救及海底设施检修的水下导航定位系统要求。随着现代海洋工业和航运产业的发展,利用水下无人小型平台进行搜救以及对水下管道等基础设施的检修成为应用热点,如马航MH370碎片的查找、坠海人员的搜寻、油井管道的维护都是需要水下小型平台的场景,对其精准定位能力及体积具有相对严格的要求:一方面要求导航定位系统能实时高效快速地进行定位和航向规划,处于障碍物较多的环境中也能抵抗定位干扰信息;另一方面此类水下无人平台带负载能力有限,因此要求组合导航系统高度集成,体积小、质量小,以保证平台本身功耗低,从而维持长时间的水下作业。
3)用于水下攻防与未来作战的水下导航定位系统要求。对于海洋攻防,随着水下互通互联技术的发展与成熟,海洋无人小型平台的协同作战将成为技术研究的热点与难点。为保证复杂水下协同/集群系统的持续稳定运转,对平台导航定位系统的信息融合能力与通信技术、校准手段都加以较高的要求。用于无人作战或作为无人武器系统,水下平台需要具备高度的隐蔽性,此时平台将主要依靠INS与地球物理组合导航手段,武器系统一般以水面舰船或潜艇为基地,对导航系统的隐蔽性和平台的自治性都需要较高要求。
4 水下无人小型平台惯性/水声组合导航发展趋势
当前,水下无人小型平台导航与定位技术仍将以INS为主、多种导航技术为辅,立足需求与技术现状的不足,对其未来发展趋势与热点进行分析:
1)传统导航方式进一步完善。现存热点和难点问题仍有很多,以INS和声学导航为代表的传统导航方式面对水下复杂或极端环境以及应对更高的应用场景,还需要进一步完善。对于SINS/DVL,需要进一步提升其在复杂环境下的可靠性;对于声学导航,依据不同的作业范围和场景,需考虑安装布放是否便捷、回收成本和校准工作量,还需在相关组合方案和融合、标定算法上进行改善。
2)导航传感器技术与工艺的发展。以INS为例,在组合导航系统中,影响最终定位效果的除了系统解算过程的原理误差、计算误差、外界干扰误差、初始条件等误差外,还体现在惯性元器件误差及安装误差等方面。传感器测得的数据质量影响着数据预处理过程,与导航解算过程共同决定着后续滤波处理与状态向量的估计效果,惯性传感器元件误差模型的精度以及传感器噪声对系统的干扰都是INS中存在的难点问题。传感器工艺的提升有赖于机械工业、电子、计算机及自动化等产业的发展,新材料的开发和传感器的集成与智能化、体积的微小型化等都将对水下导航定位系统的性能提升具有巨大意义。
3)水下导航定位与通信技术一体化。我国“海洋强国”战略的提出,使得 “走入水下,走向深海”成为水下无人小型平台的未来发展方向。水下兵力和武器装备作为维护我国海域安全的重要条件,除对导航定位具有更高的需求外,还依赖于高性能水下通信技术的保障。水下导航定位与通信技术一体化主要用于无人潜航器、水下滑翔机、潜标等小型平台上,保证平台在水下获取准确的位置与航向信息的同时,能与岸基、天基、空基信号收发站之间进行高效持续的信息交换。当前一体化过程中较大的问题存在于水下通信方面,可用于水下的有线、水声、激光及无线通信技术都存在一定的不足,如远距离的通信与隐蔽性、设备覆盖范围之间无法平衡、深水作业平台接收信息匮乏、远程传输速率低、信息量少且难以实现高质量双向通信等都是阻碍水下导航定位与通信技术一体化发展的难点。
无论是面对水下攻防的军用领域还是海洋开发的民用需求,水下通信的发展及其与导航定位技术一体化都起到重要的助推作用。未来,随着所提水下通信技术中存在的问题逐步解决,水下导航定位与通信技术一体化也将得到逐步完善,这将为水下作业形式提供新思路,提升水下无人小型平台的综合性能。
4)组合导航系统智能化,兼具高可靠性、高集成度和综合补偿及自动校正。易知水下环境中单一的导航定位方式无法保证水下无人平台的高性能工作,因此需要采用多种导航方式的结合,除了本文所述惯性和声学导航,还有适用于水下的新型导航方式如地形轮廓跟随、重力场匹配等技术,要点和难点在于需要构建高精度、高分辨率的数据库,这也是有待完善的方向。建立多种方式相结合的具有综合补偿自动校正的智能系统将具有极大的应用前景。
水下小型无人平台的出现及发展大大提升了我国水下征程的建设速度,惯性/水声导航定位作为其关键技术之一,在不断发展的同时也面临着更大的挑战,需要承担更加艰巨的任务。我国惯性/水声导航技术的发展目前仍与国外有较大差距,需要进一步探索。立足需求和现状,水下无人小型平台导航定位系统的低功耗、小型化、高精度和一体化仍是主流发展方向。
5 结论
小型无人平台的组合导航技术已成为人类进行水下多方位活动的重要支撑,是推动我国海洋经济开发、海防建设的重要基础。深入发展精确、可靠、高性能的惯性/水声组合导航技术是满足更多海洋工程、水下建设的关键途径,也是缩短与国外技术差距的迫切任务。对此,既要立足当下需求,不断完善和改进导航定位系统的关键技术,又要着眼未来趋势,重视惯性/水声组合导航定位方法的创新发展。
猜你喜欢
导航定位学报(2022年4期)2022-08-16
舰船科学技术(2022年11期)2022-07-15
智慧电力(2022年4期)2022-05-19
家庭影院技术(2021年7期)2021-08-14
北方文学(2020年22期)2020-09-08
福建文学(2019年12期)2019-08-06
中学生数理化·中考版(2014年5期)2016-12-22
扬子江(2016年1期)2016-05-19
中学生数理化·中考版(2016年5期)2016-05-14
扬子江诗刊(2015年5期)2015-11-14