
基于Dugoff轮胎模型对车辆质心侧偏角估计
2021-02-14 00:39:14张亮石沛林周龙辉蒋军锡梁明磊侯建伟
广西大学学报(自然科学版) 2021年6期
张亮,石沛林,周龙辉,蒋军锡,梁明磊,侯建伟
(山东理工大学 交通与车辆工程学院, 山东 淄博 255049)
0 引言
在车辆的动态稳定性控制系统中,通常用横摆角速度和质心侧偏角作为控制系统的状态变量[1-2]。其中车辆的质心侧偏角直接测量成本较高,一般采用估计算法获得。利用扩展卡尔曼滤波(extended kalman filter,EKF)或其他方法估计车辆状态参数是车辆控制的重要研究方向之一。
当车辆侧向加速度较小时,轮胎侧偏角也较小,此时,轮胎侧偏角与侧向力近似呈线性关系,可以通过卡尔曼滤波等算法实现对质心侧偏角的估计[3- 4],但当车辆运动状态处于非线性区域时,将无法获得准确的质心侧偏角。彭博等[5]基于非线性魔术轮胎模型和二自由度车辆模型,建立了以模型输出的横摆角速度为反馈量的滑模观测器,在线性区和非线性区都能准确估算车辆质心侧偏角;郭孔辉等[6]运用扩展卡尔曼滤波方法在轮胎的线性和非线性区域内对质心侧偏角进行估计,预测的结果实时性较好,且非线性轮胎轮胎模型比线性模型精度高。但上述文献均采用二自由度模型,没有考虑纵向车速随时间的变化这一因素。
笔者考虑车速的变化,在二自由度模型基础上加入纵向车速,建立四轮三自由度车辆模型和Dugoff轮胎模型,通过车轮角速度、横摆角速度等车辆运动状态参数推导出轮胎侧偏角、垂直载荷等参数,并基于EKF算法估算车辆的质心侧偏角。
1 卡尔曼滤波器和扩展卡尔曼滤波器
1.1 卡尔曼滤波器
卡尔曼滤波(kalman filter, KF)算法是一种在线实时信号处理算法,能够广泛应用于实际系统中[7]。卡尔曼滤波器是一种以最小二乘法为基础,在时域内设计的递归线性最小方差估计,根据状态方程模型,利用前一时刻的估计值和当前时刻的观测值来更新对状态变量的估计。
对于卡尔曼滤波,线性系统可以表示:
状态方程:
xk=Axk-1+Buk-1+wk-1。
(1)
观测方程:
yk=Hxk+vk,
(2)
式中,xk为k时刻系统的状态向量;xk-1为k-1时刻系统的状态向量;uk-1为k-1时刻的系统输入;yk为k时刻的观测向量;A为状态矩阵;B为控制矩阵;H为观测矩阵;wk-1为过程噪声;vk为观测噪声。
卡尔曼滤波算法的实现需要经过预测和校正两个步骤,算法步骤如下:
① 预测过程
状态预测方程为
xk=Axk-1+Buk-1。
(3)
误差协方差预测方程为
Pk=APk-1AT+Q,
(4)
式中,Pk为k时刻对应于xk的协方差;Q为过程噪声的协方差矩阵。
② 校正过程
增益方程为
Kk=PkHT(HPkHT+R)-1,
(5)
式中,R为观测噪声的协方差矩阵。
滤波方程为

误差协方差更新方程为
Pk=(1-KkH)Pk。
(7)
1.2 扩展卡尔曼滤波器
前面介绍的卡尔曼滤波算法只应用于线性系统,而在实际系统中,完全线性的系统是不存在的。针对卡尔曼滤波的局限性,后续发展的扩展卡尔曼滤波,解决非线性模型的估计问题。扩展卡尔曼滤波算法是通过对非线性函数进行泰勒展开并舍弃高阶分量,在确保精度的前提下对非线性模型做线性化处理[8],从而使卡尔曼滤波能适用于非线性系统。由于EKF与KF不同的地方只有状态预测公式,所以在这里只对EKF的状态预测做详细介绍。
非线性系统的状态方程和观测方程为
yk=h(xk,uk)+vk。
(9)
模型线性化:
式中,F表示状态转移矩阵,是f对x的偏导雅克比矩阵。
式中,H表示观测矩阵,是h对x的偏导雅克比矩阵。
2 质心侧偏角估计模型
2.1 二自由度车辆模型
建立二自由度车辆模型,用卡尔曼滤波和扩展卡尔曼滤波建立状态方程和测量方程,实现质心侧偏角的估计,对比卡尔曼滤波和扩展卡尔曼滤波的估计精度。二自由度车辆模型如图1所示。
2.2 四轮三自由度车辆模型
汽车稳定性控制研究的重点主要是侧向和横摆运动。对质心侧偏角进行估计时,需要考虑纵向车速对估计结果的影响。因此本文建立了具有纵向、侧向和横摆运动的四轮三自由度车辆模型,如图2所示。
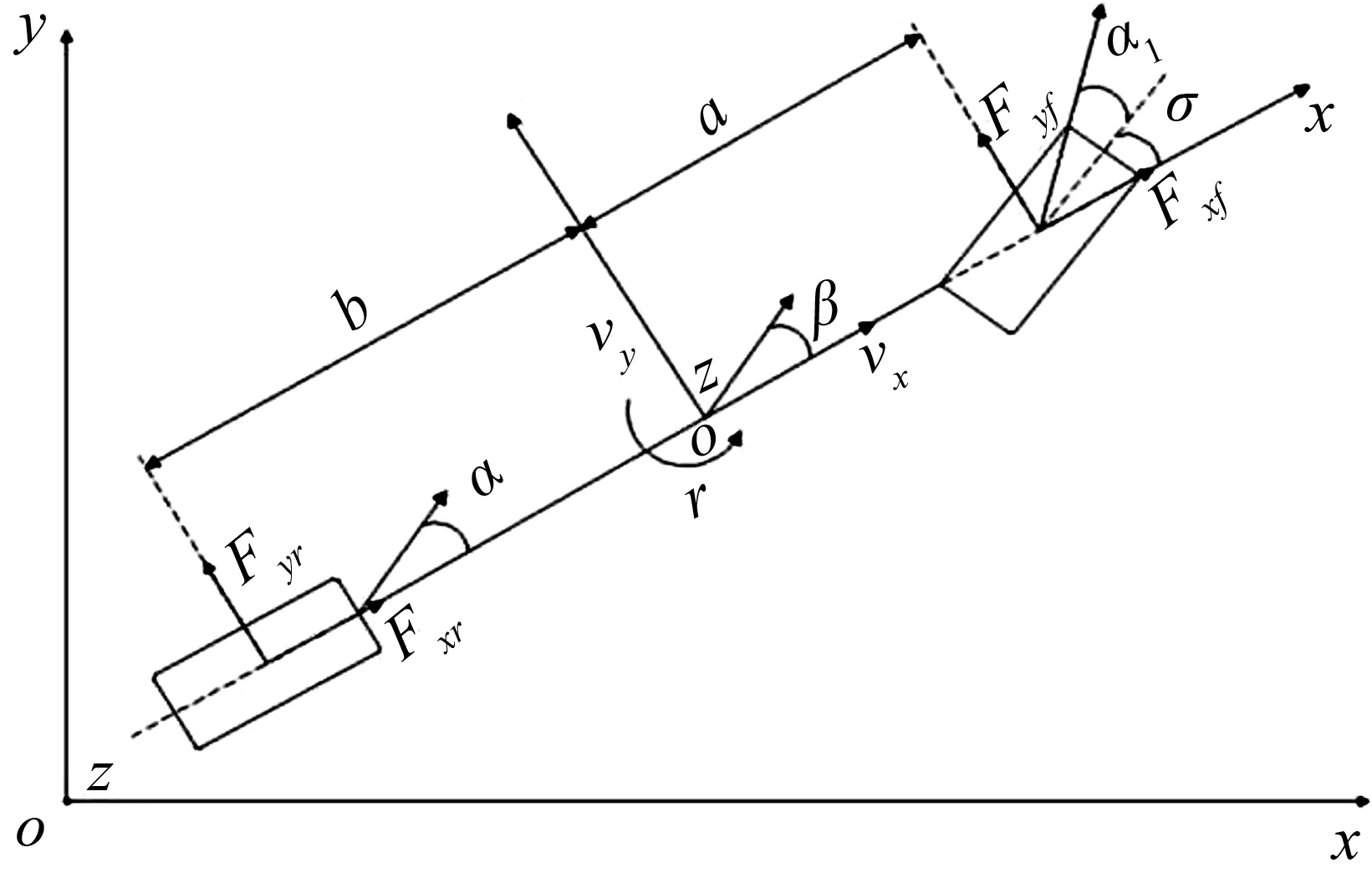
图1 二自由度车辆模型Fig.1 2-DOF of vehicle model
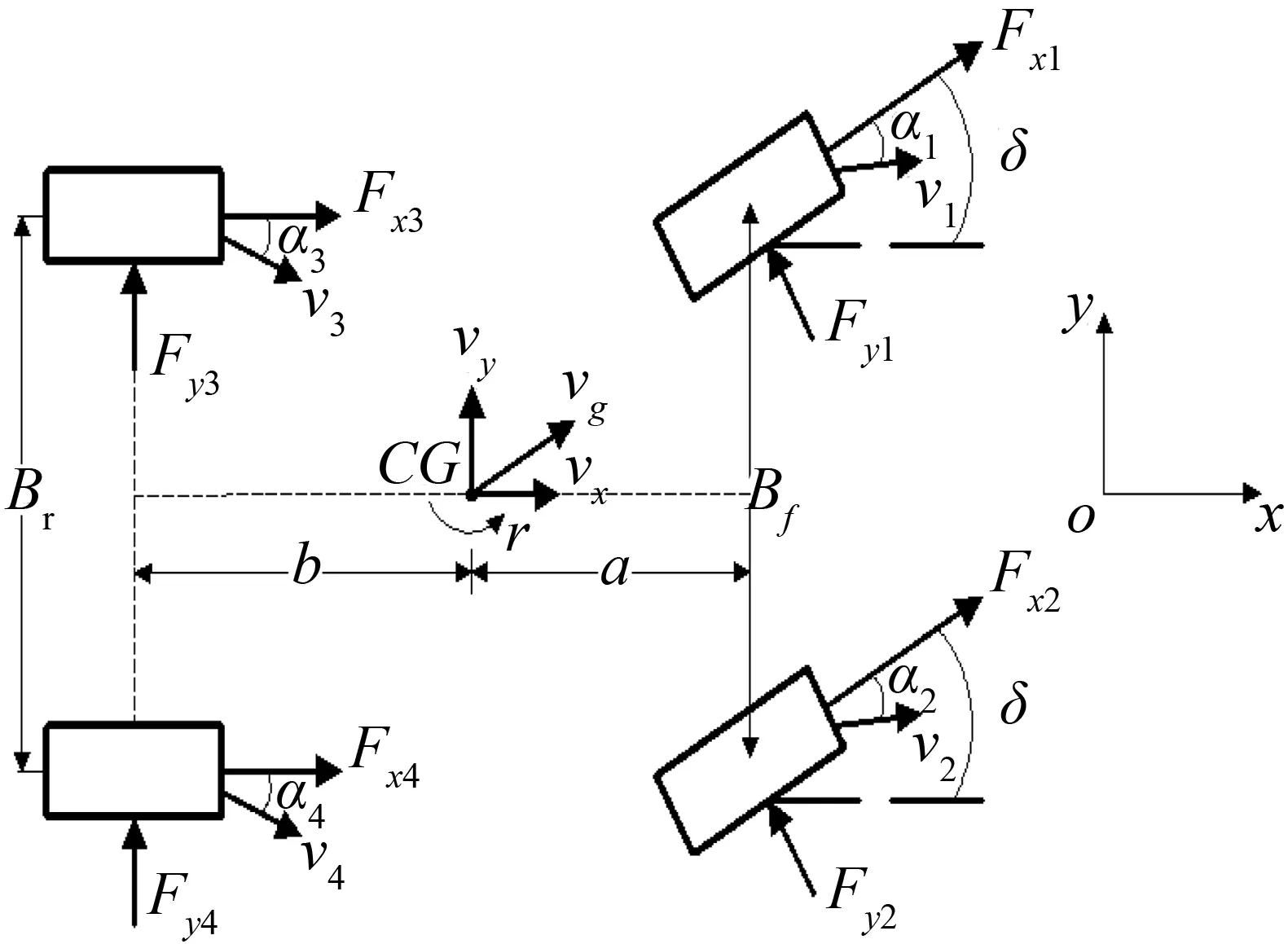
图2 四轮三自由度车辆模型Fig.2 3-DOF of four-wheel vehicle model
汽车正常行驶时,侧向加速度不超过0.4 g,侧偏角不超过4°~5°,可以认为侧偏角与侧偏力呈线性关系。汽车运动状态处于线性区时,车辆动力学模型方程式如下:
式中,β为车辆质心侧偏角;Iz为质心转动惯量;r为横摆角速度;δ为前轮转角;a为前轴到质心的距离;b为后轴到质心的距离;m为整车质量;vx为车辆纵向速度;k1和k2为前后轴的侧偏刚度。
汽车运动状态进入非线性区域时,需要考虑侧偏角和侧向力的非线性关系,车辆纵向和侧向的动力学方程式如下:
式中,vy为车辆的侧向速度;Fx1为左前轮胎的纵向力;Fx2为右前轮胎的纵向力;Fx3为左后轮胎的纵向力;Fx4为右后轮胎的纵向力;Fy1为左前轮胎的侧向力;Fy2为右前轮胎的侧向力;Fy3为左后轮胎的侧向力;Fy4为右后轮胎的侧向力。
本文通过式(14)、(15)获得纵向、侧向速度,计算质心侧偏角β,公式如下:
2.3 轮胎模型
Dugoff轮胎模型[9]所需参数较少且表达形式简单,所以本文采用Dugoff轮胎模型计算轮胎的纵向、侧向力,轮胎力计算公式如下:

式中,Cy为轮胎侧向侧偏刚度;Cx为轮胎纵向侧偏刚度;σ为纵向滑移率;α为轮胎侧偏角;μ为路面附着系数;Fz为垂向载荷。
上述轮胎力的计算公式是在轮胎侧偏角、垂向载荷和滑移率作为已知量的前提下实现的,因此需要获得轮胎的侧偏角、垂向载荷以及滑移率。本文的轮胎侧偏角计算公式[10]如下:
式中,Bf为车辆前轮轮距;Br为车辆后轮轮距;α1为左前轮侧偏角;α2为右前轮侧偏角;α3为左后轮侧偏角;α4为右后轮侧偏角。
垂向载荷计算公式如下:
式中,g为重力加速度;h为质心高度;ax为纵向加速度;ay为侧向加速度;Fz1为左前轮垂向载荷;Fz2为右前轮垂向载荷;Fz3为左后轮垂向载荷;Fz4为右后轮垂向载荷。
轮胎滑移率计算公式如下:
式中,ωw为车轮的角速度;Re为车轮的动力半径。
3 KF估计器和EKF估计器设计
3.1 KF估计器设计
根据二自由度汽车模型,建立基于卡尔曼滤波的状态方程和观测方程。
状态方程:
观测方程:
3.2 EKF估计器设计
本文针对汽车处于线性区和非线性区的两种运动状态,分别建立了基于线性模型和非线性模型的两种扩展卡尔曼估计器。
非线性系统的状态方程和观测方程为

y(t)=h[x(t)]+v(t)。
(33)
汽车运动状态处于线性区时,侧偏角与侧偏力近似呈线性关系,由式(12)、(13)可得线性模型的状态方程为
观测方程为
求得偏导雅克比矩阵为
式中,T为仿真步长,本文设置为0.01 s。
基于线性模型的扩展卡尔曼滤波器,在纵向车速保持不变时,其形式即为二自由度车辆模型的扩展卡尔曼估计器。
汽车运动状态处于非线性区时,考虑侧偏角和侧向力的非线性关系。由于本文采用的车辆模型为前置前驱,所以这里将Dugoff模型求得的前轮的轮胎力作为状态变量,纵向、侧向加速度作为观测向量,非线性模型状态方程为

观测方程为

4 估计结果验证
为了验证本文建立的质心侧偏角估计方法的有效性和估计精度,采用CarSim软件搭建整车模型以及双移线道路模型,整车主要参数见表1。在MATLAB/Simulink中搭建了卡尔曼估计器和扩展卡尔曼估计器,建立CarSim和MATLAB/Simulink的联合仿真模型。车辆质心侧偏角估计器的输入为CarSim输出的纵向、侧向加速度等基本信号和轮胎模型计算的轮胎力,通过更改车速进行了一系列的数值实验,检验所建立的质心侧偏角估计模型的性能。EKF估计器的算法步骤通过MATLAB的“S-Function”模块编写。

表1 整车主要参数Tab.1 Main parameters of vehicle
4.1 KF和EKF的估计结果对比
车速分别为40 km/h和80 km/h,路面附着系数为0.9时,卡尔曼滤波和扩展卡尔曼滤波对质心侧偏角估计结果对比如图3所示。从图3可以看出,当纵向车速为40 km/h时,EKF比KF的估计结果更接近Carsim的值,而在纵向车速变为80 km/h时,KF的估计结果已经出现了较大误差,而EKF估计的质心侧偏角与Carsim值非常接近,所以在这两种估计方法中,EKF对质心侧偏角的估计效果更好。
(a) vx=40 km/h
(b) vx=80 km/h

图3 KF和EKF对质心侧偏角估计结果对比Fig.3 Comparison of KF and EKF estimates of sideslip
4.2 非线性模型的估计结果
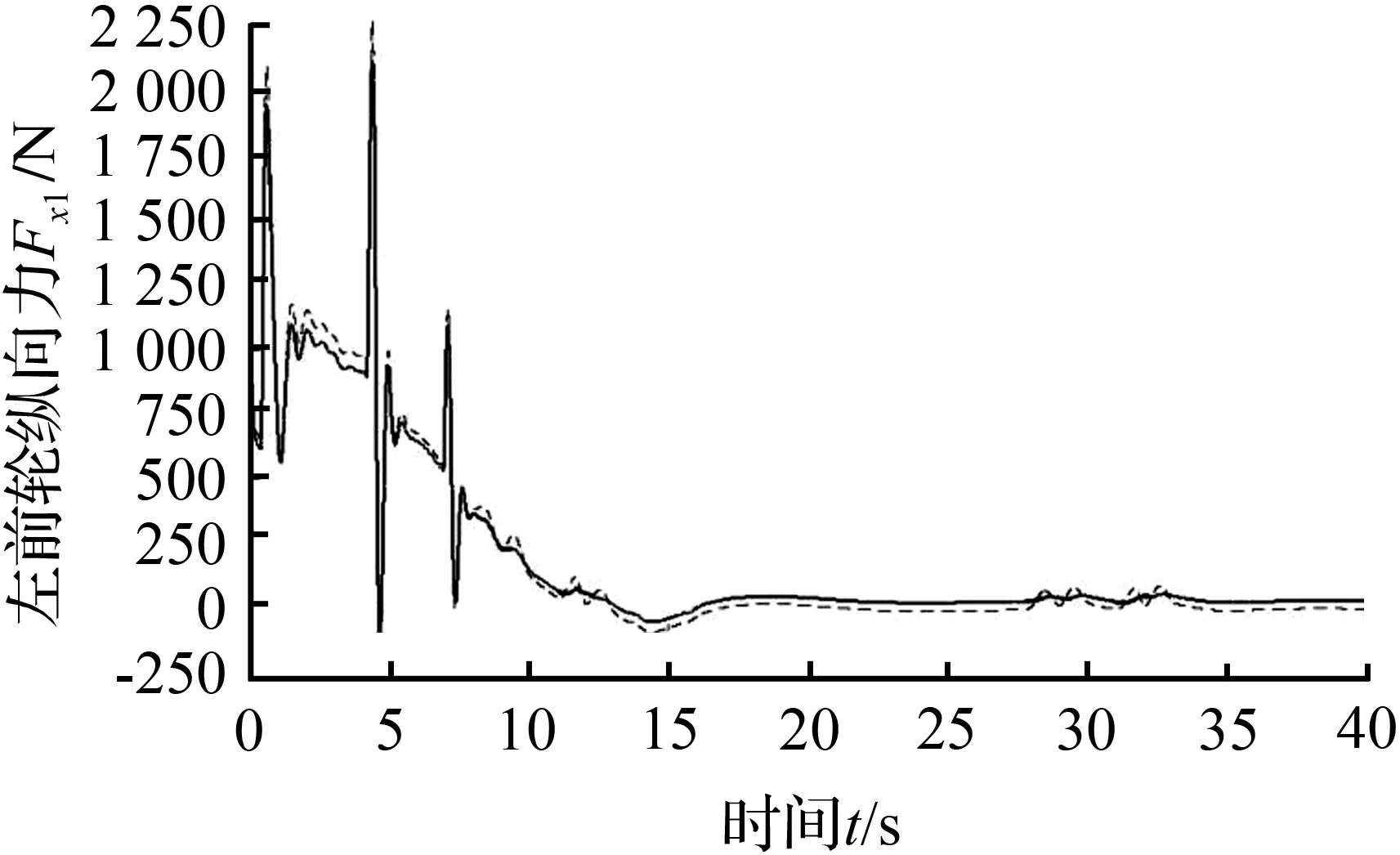
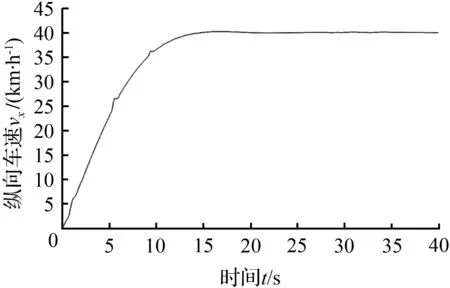
设置纵向车速从0加速到40 km/h,然后保持匀速行驶,同时设置方向盘转角输入,车速vx和方向盘转角βsw如图4所示。基于非线性模型的EKF估计器估计的前轮轮胎力如图5所示。
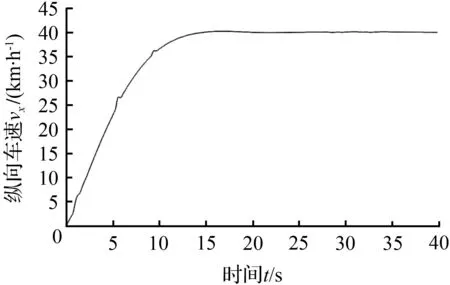
(a) 纵向车速vx
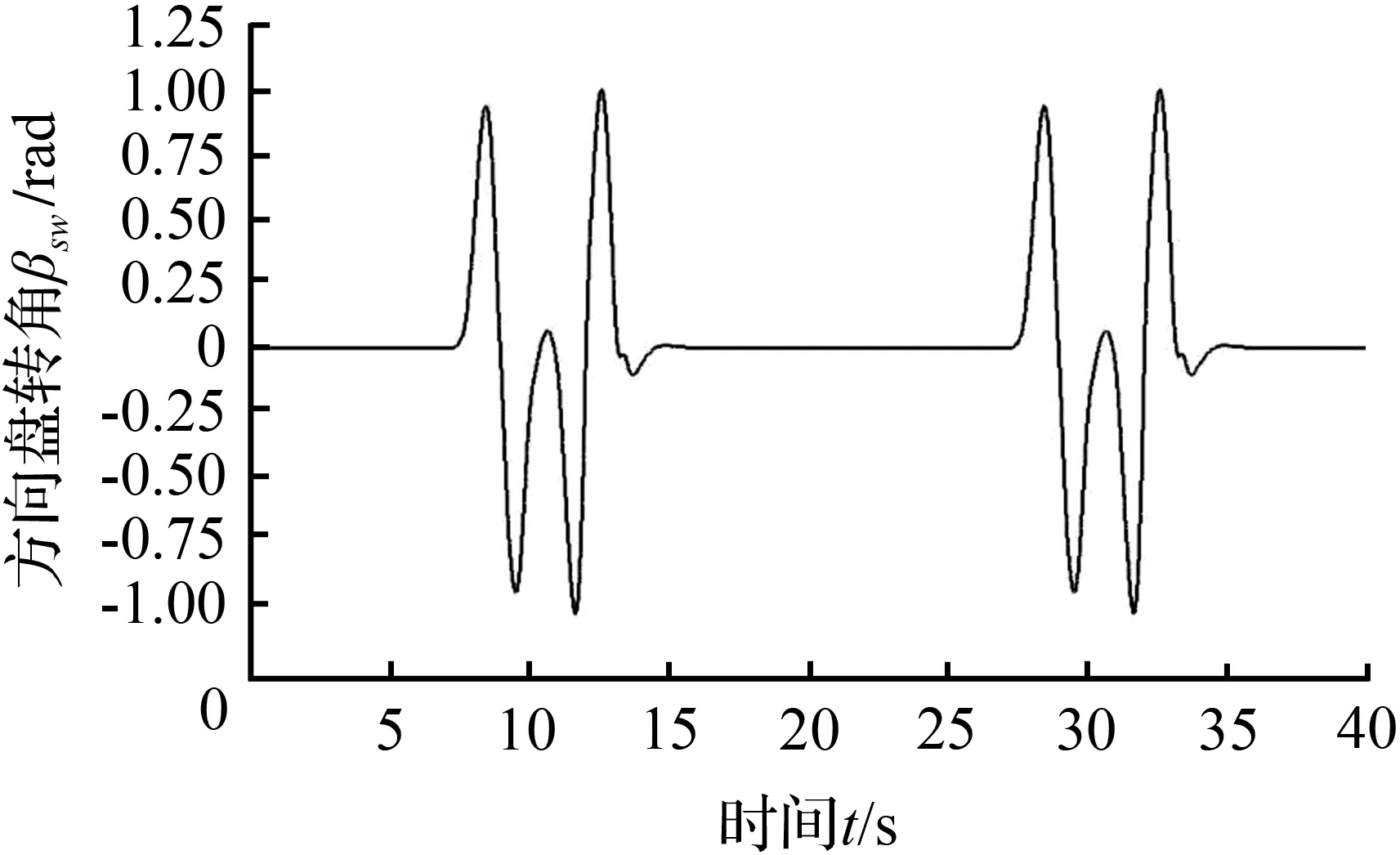
(b) 方向盘转角βsw
(a) 左前轮纵向力Fx1
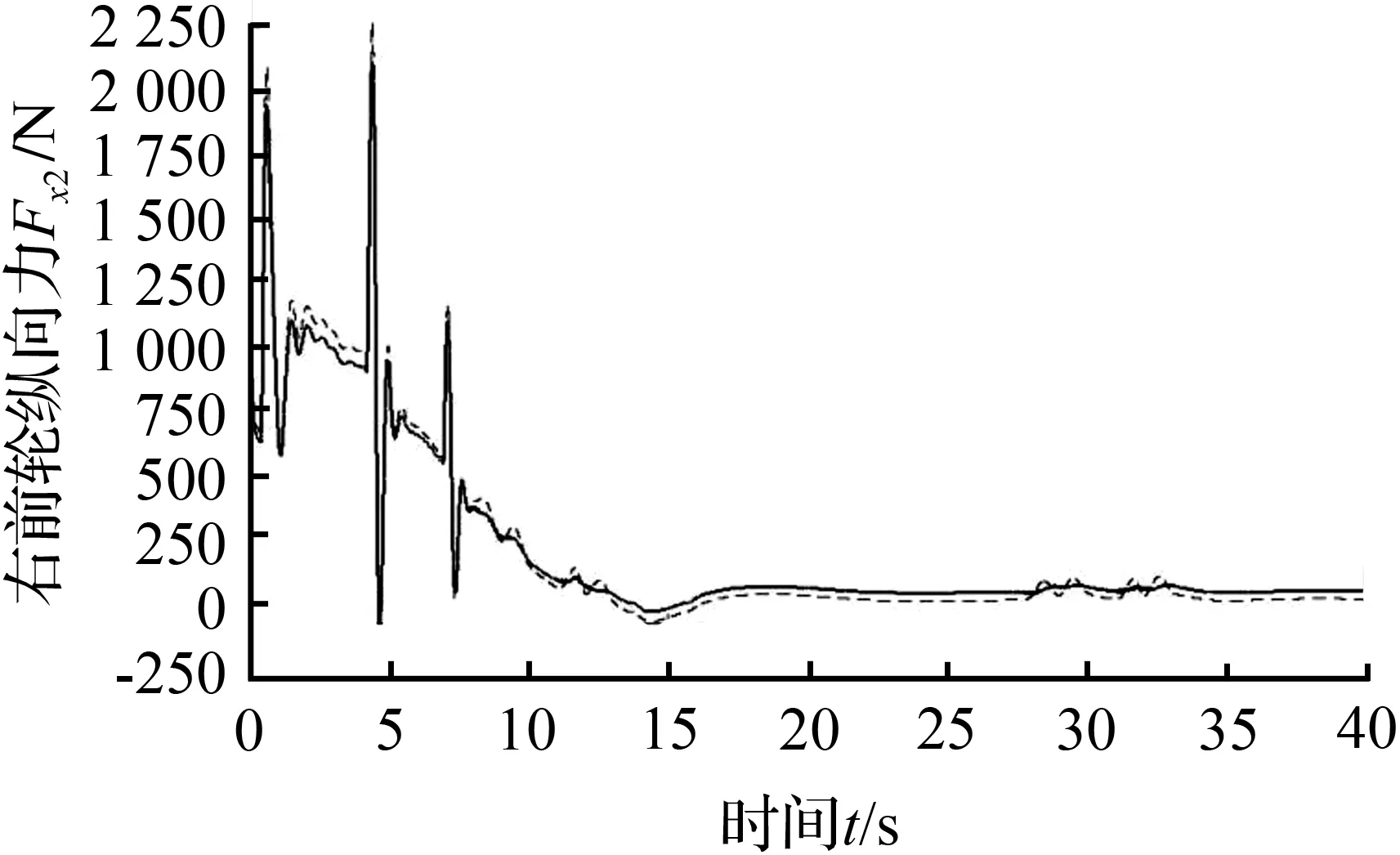
(b) 右前轮纵向力Fx2
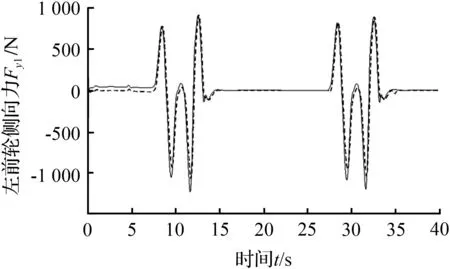
(c) 左前轮侧向力Fy1

(d) 右前轮侧向力Fy2

图5 前轮轮胎力估计结果Fig.5 Estimation results of front tire force
从图5可以看出,基于非线性模型的EKF估计器可以较准确地估计出轮胎力的值,通过估计得到的轮胎力可以进一步求出车辆的质心侧偏角。
4.3 线性和非线性模型的估计结果对比
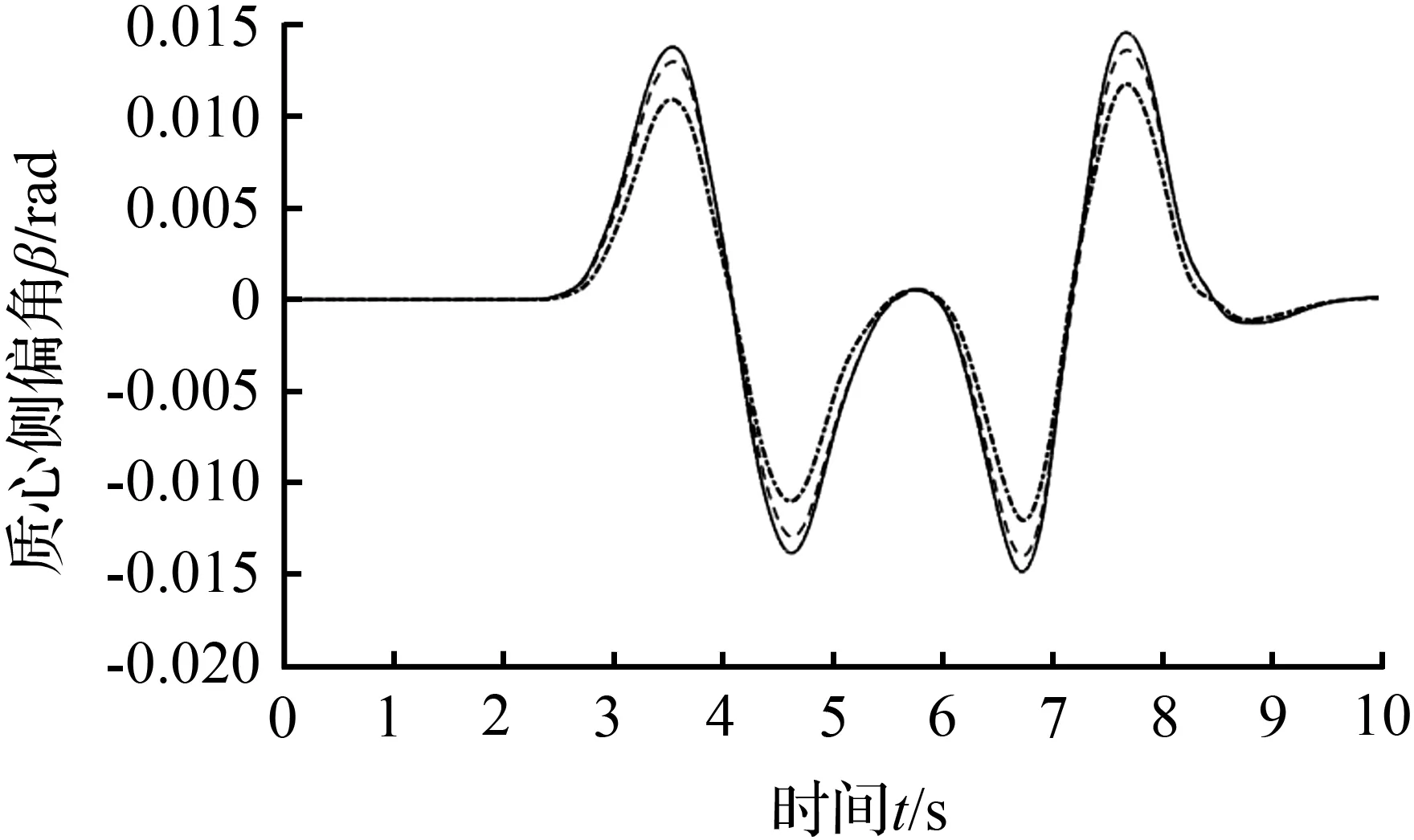
纵向车速从0加速到40 km/h,然后保持速度不变,路面峰值附着系数为0.9,方向盘转角输入不变,进行了低速双移线工况的仿真。低速仿真结果如图6所示,从图6可以看出,线性模型和非线性模型的估计结果均能够较好的跟随CarSim输出的值。
(a) 纵向车速vx
(b) 质心侧偏角β

图6 低速仿真结果Fig.6 Simulation results of low speed
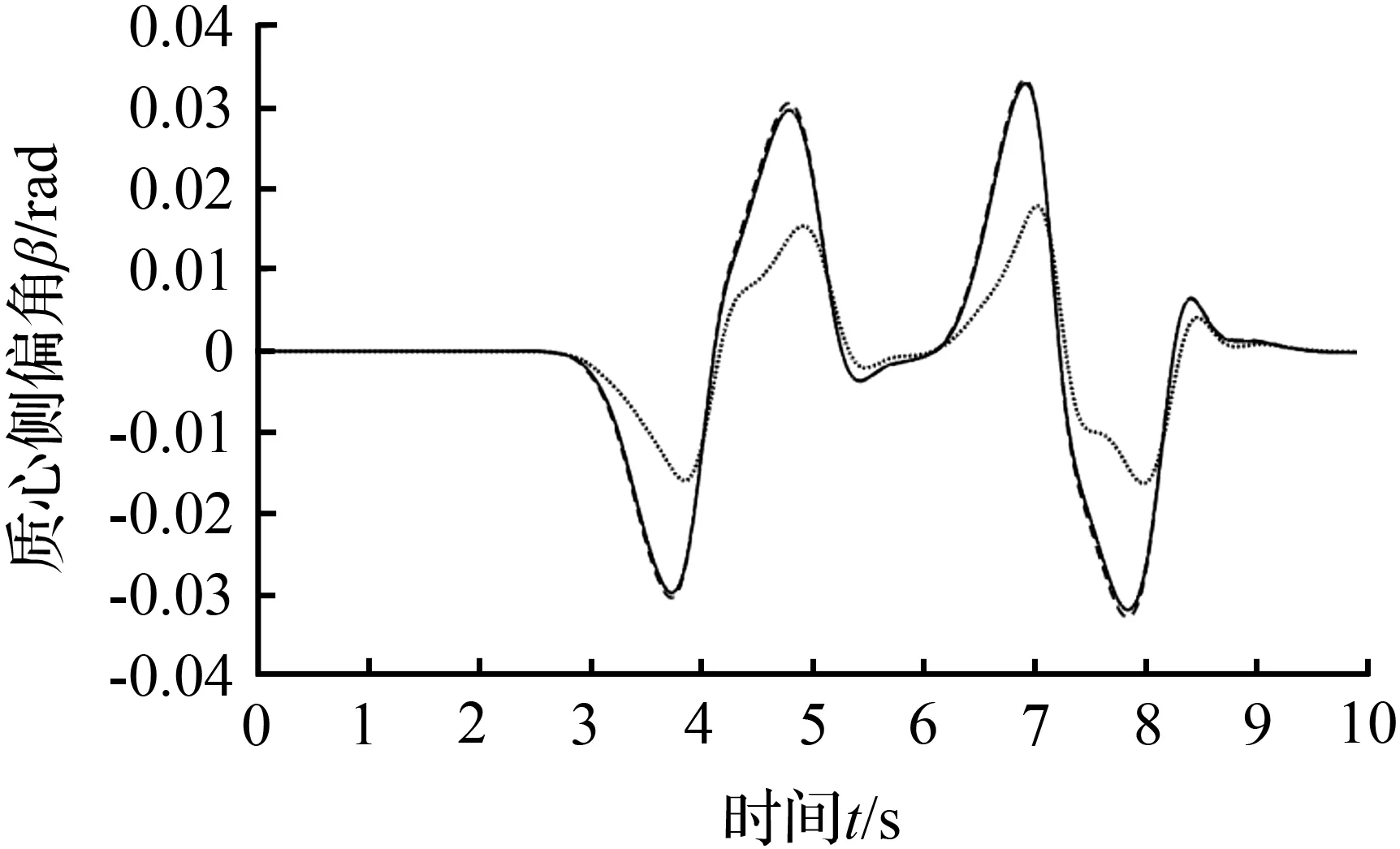
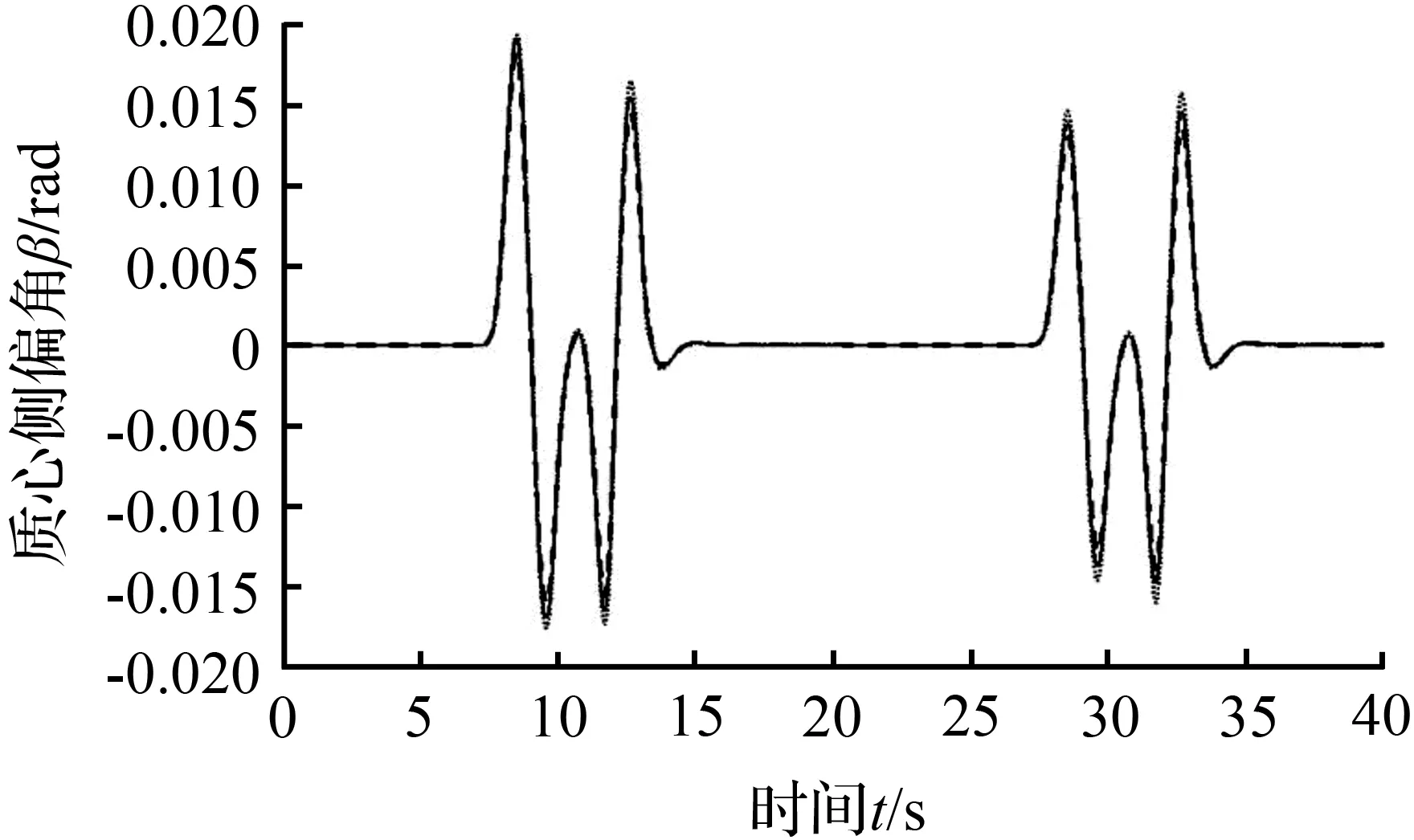
纵向车速从0加速到80 km/h,然后保持速度不变,高速仿真结果如图7所示。从图7可以看出,此时线性模型的估计值与CarSim输出的值相差很大,而非线性模型的估计值仍与CarSim相接近。
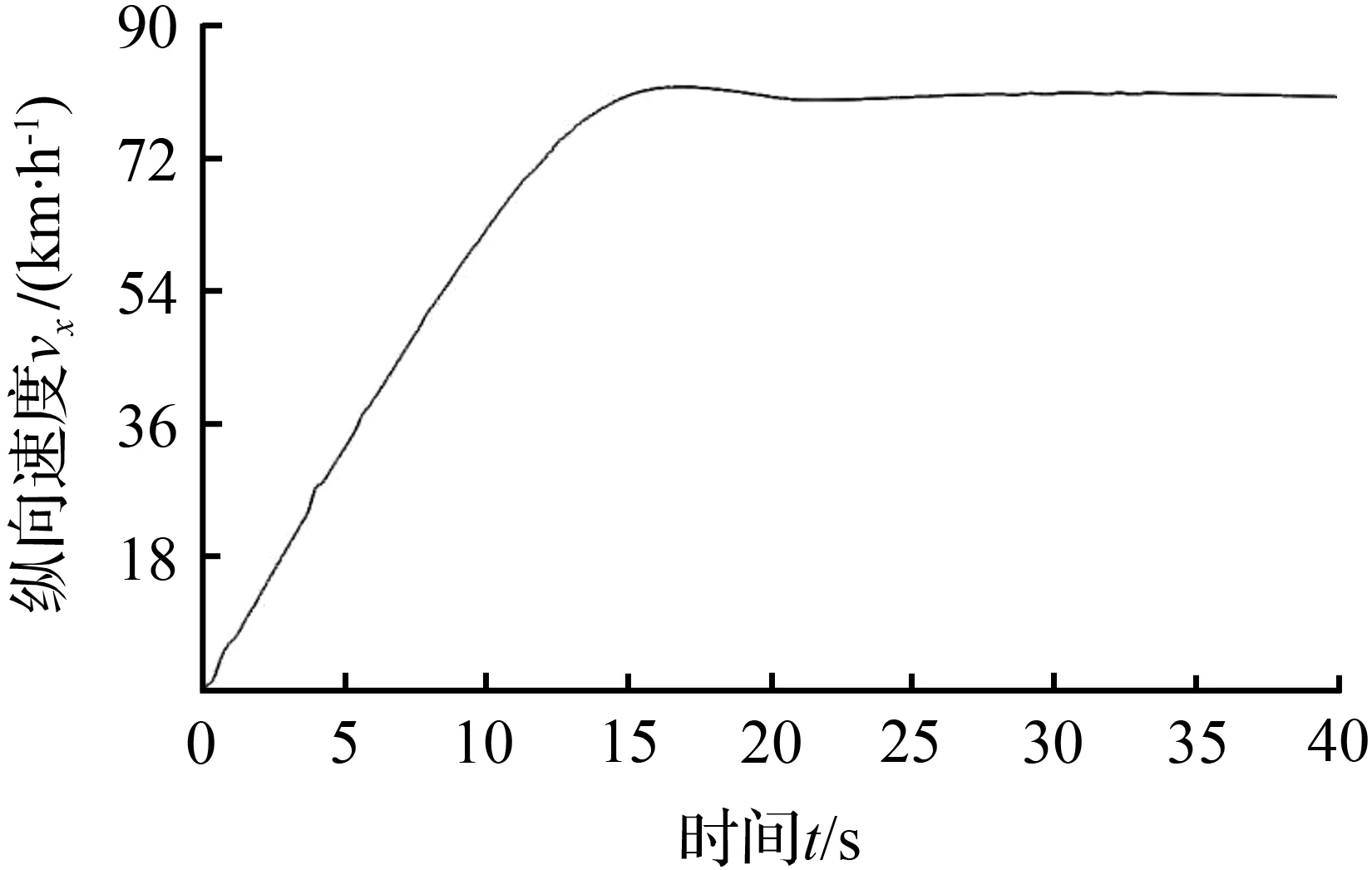
(a) 纵向车速vx

(b) 质心侧偏角β

图7 高速仿真结果Fig.7 Simulation results of high speed
此外,为了清楚地量化两种模型的估计精度,利用统计值即归一化均方根[11](normalized root-mean-square,NRMS)进一步评估所使用预测模型的性能,其值用字母N表示,计算公式如下:
式中,Sactual为测量信号值,Sestimated为估计信号值,n为采集的样本数。计算结果见表2。

表2 双移线工况下的归一化均方根Tab.2 NRMS of double lane change
表2列出了双移线工况下两种模型的归一化均方根,可以看出非线性模型的归一化均方根相比于线性模型均较小,尤其在车速较大时,此时非线性模型对质心侧偏角的估计效果显著高于线性模型。
5 结论
本文利用二自由度汽车模型,基于卡尔曼滤波和扩展卡尔曼滤波建立质心侧偏角估计模型,通过MATLAB/Simulink和CarSim联合仿真,验证了扩展卡尔曼滤波的估计精度高于卡尔曼滤波。
根据四轮三自由度车辆模型,针对车辆处于线性和非线性的两种运动状态,建立了线性和非线性的车辆模型,其中非线性车辆模型的建立采用了Dugoff轮胎模型,利用车辆可测量的横摆角速度、前轮转角和车轮角速度等状态参数来计算轮胎侧偏角、垂直载荷等参数,实现对轮胎力的计算。
基于扩展卡尔曼滤波算法,分别建立了线性和非线性的质心侧偏角估计器。
通过CarSim建立整车模型,MATLAB/Simulink搭建扩展卡尔曼估计模型,两者联合仿真,通过低速和高速双移线工况仿真实验,结果验证了所建立的非线性估计模型在线性区域和非线性区域均能实现对质心侧偏角的估计,估计精度高于线性模型。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30 06:24:26
北京航空航天大学学报(2021年4期)2021-11-24 01:13:12
装备制造技术(2021年4期)2021-08-05 07:39:40
民用飞机设计与研究(2020年4期)2021-01-21 09:15:46
新课程·中学(2019年7期)2019-09-17 13:41:15
物理教学探讨(2018年1期)2018-02-13 09:26:52
红蜻蜓·低年级(2015年11期)2016-02-02 11:04:45
农机使用与维修(2014年11期)2014-11-18 01:32:07
中国自行车·骑行风尚(2014年4期)2014-10-10 05:00:14
航天器工程(2014年5期)2014-03-11 16:35:53
