
嵌入式智能运输小车的设计
2021-02-11 06:15楼琼蕙
无线互联科技 2021年24期
楼琼蕙
(共青科技职业学院,江西 九江 332020)
0 引言
传统智能小车的嵌入式系统通常使用单片机,也可以使用ARM嵌入式系统,从构成上来看,包括软件系统和硬件系统。其中,硬件系统所发挥的功能是裁剪以及用于拓展。本文所介绍的嵌入式智能运输小车,硬件环境采用xilinx的FPGA开发板搭建工程,根据扩展需要添加最小系统乃至IP核,其扩展是一对一实现的,不会造成资源浪费[1]。FPGA的嵌入式系统的应用中,可以发挥FPGA的并行执行效应,还可以有效控制嵌入式软件的逻辑过程。
1 嵌入式智能运输小车的总体方案设计
小车的主控制器是Spartan-6 FPGA,其应用成本低,功耗也比较低。传感器所使用的摄像头中安装有图像采集模块,型号为ov6620。在采集信息的过程中,还可以测量路径,使用具有测距功能的HCSR04超声波模块,两者实现优势互补,当小车处于运行状态的时候可以有效控制。小车上安装有电机,对于运转速度的确定以及舵机转角的确定需要应用模糊算法计算,使小车的各项操作稳步进行。
1.1 主控制器
主控制器采用的是可编程逻辑器件FPGA,即便是复杂的逻辑功能也可以实现。FPGA的体积小,不会占用很大空间,而且为大规模、高密度,有很高的稳定性,有丰富的IO资源,扩展外围功能非常容易。FPGA的成本越来越低,搭建嵌入式系统具有可行性,不仅软件灵活性较高,而且具备并行快速执行效率。所以,本设计所采用的主控制器是Nexys3 Spartan-6。
1.2 电源稳压芯片
直流电机在运行的过程中会产生很大的功耗,这就决定了供电源需要使用7.2 V,2 000 mAh的电池,降压芯片所使用的开关电源为LM25xx系列单片集成,输出功率非常大,有很高的转换效率,且具有稳定的性能[2]。
1.3 电机驱动
电机驱动所使用的是全桥驱动,使用BTS7960B搭建,即使输出功率非常大也可以满足,可以对两个电机进行驱动。
1.4 摄像头模块
使用ov6620数字摄像头,容易控制且成本低,信号有较高的稳定性。
2 系统硬件的设计
2.1 车体模型
在小车上安装摄像头,可以采用寻找黑线的方式对路线进行指引,发挥超声波测量距离的作用,小车还可以自主控制速度。
2.2 电源模块
输入电源为7.2 V,输出电源为5 V,且电源的输入和输出都有较高的稳定性[3]。
在电源模块的设计中,主芯片是低压差线性稳压器,一共有4个,可以起到降压的作用。为了避免用户将输入电源反接,可以使用集成防反接电路模块。如果所使用的设备电流非常大,使用5 A通道效果会更好一些,设备得以顺利驱动。
在电源模块上有很多的引脚,非常适合智能小车,可以为传感器供电,特别是各类传感器以及核心板、电机等等都有不同的供电电压,使用这个模块更便于供电。为了保护好电源板,需要实施防反接保护措施,还需要实施短路保护和芯片热保护等。
2.3 核心板
在设计核心板的时候微处理器起到核心作用,会对选择其他硬件设备产生一定的影响。技术快速升级,微处理器的性能更加完善。ARM处理器的资源非常丰富,低功耗、低价格,有很高的性价比。ARM的Thumb指令是16位,处理器是32位,有很快的处理速度[4]。ARM的片内有非常丰富的外设资源,将自身的资源充分利用起来,外围器件的控制功能就会有所增加。使用ARM微处理器还可以对操作系统移植,使智能小车更加智能化,运行效率更高。所以,在本设计中使用了ARM处理器。
2.4 循迹模块
使用的数字传感器中,在同一面上安装光敏二极管和发光二极管各一只,一共安装了8个传感器。数字传感器所发挥的功能是因为检测面的颜色不同,对光会有不同的反射程度,在检测颜色深浅的时候充分利用了不同检测面产生不同的光敏电阻这一原理。在检测的过程中,发光二极管发光,向检测面照射,部分光线反射回来,光敏二极管对光线的强度进行检测,转换为机器人能够有效识别的信号。数字传感器的返回值为高低电平,模拟信号经过电压比较器划分为高电平信号和低电平信号。发挥电位器的作用,就可以对高电平信号和低电平信号的分界线进行调节,此为光灵敏度的调节。
3 系统的软件设计
在对智能小车的软件设计时,需要使用EDK工具安装开发平台,搭建最小的嵌入式系统,将芯片所对应的库安装好,进行开发环境的设置,主要用于软件编程。接着进行模块化的编程,按照每个环节的操作内容运行小车,使其能够搬运物块[5]。
在软件设计中,对于外部硬件驱动可以使用IP核的形式在最小系统中添加,驱动核心代码的编写需要使用硬件描述语言,通过寄存器,软件就可以对外部硬件驱动(见图1)。
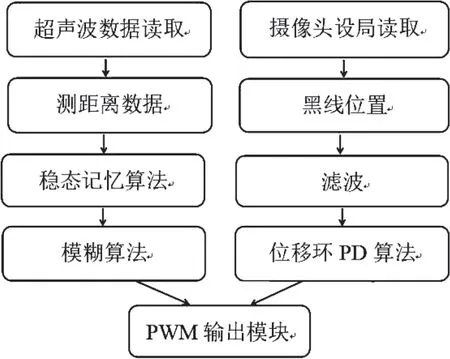
图1 软件结构
具体的操作中,小车接收到启动指令后,开始自行移动,按照数字传感器的返回值判断行动路线,自主寻找行动的轨迹。当移动到指定位置之后,就开始对物块的特征进行识别,使用钩爪抓取物块。返回的时候,同样是选择合适的路线,按照指令将物块送到指定的位置[6]。
如果嵌入式智能运输小车没有完成搬运物块的任务判断,就要重复进行上面的操作程序,但是如果物块摆放在不同的位置上,在寻找物块和抓取物块的时候,还需要对小车自身所在位置以及物块所在的位置做出判断,对返回的路线做出选择,最终完成物块的搬运,返回到起点。
4 实验与分析
对所设计的嵌入式智能运输小车进行实验测试,所有的功能模块都可以正常发挥作用,电机可以正转也可以反转,而且能够调节速度。小车在运行过程中能够正常循迹,小车的钩爪能够按照指令抓取物块。嵌入式智能运输小车完成任务之后,自动回到起点的位置。
5 结语
通过上面的研究可以发现,目前工业自动化正在向智能化方向发展,发挥智能技术的作用实现工业转型,主要的目的是生产个性化产品,可以智能化操作,服务更加便捷。现在,智能技术已经渗入到整个工业生产周期,可以在传感条件下完成智能化制造。智能产品通过传感器的作用,可以发挥感知功能,实现人机交互,还可以应答、决策,使工厂的管理实现智能化。智能运输小车作为轮式机器人在工业企业进行应用,能够给工业生产运行和管理带来诸多的便利。
猜你喜欢
高中数理化(2020年24期)2021-01-29
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
电子制作(2018年8期)2018-06-26
铁道通信信号(2018年2期)2018-04-18
数理化解题研究(2017年1期)2017-06-15
电镀与环保(2016年3期)2017-01-20
单片机与嵌入式系统应用(2014年9期)2014-03-11
自动化博览(2014年4期)2014-02-28
物理通报(2011年12期)2011-01-25
