基于布尔运算的巷道精准建模研究及应用
2021-02-04 06:53王红娟卢新明李金龙张善兵
软件导刊 2021年1期
王红娟,卢新明,李金龙,张善兵
(1.山东科技大学 智能装备学院;2.山东蓝光软件有限公司,山东 泰安 271000;3.宁夏煤矿设计研究院有限责任公司,宁夏银川 750021)
0 引言
巷道三维建模是数字矿山和智慧矿山建设的重要组成部分,是实现煤炭精准开采的基础和保障。根据实测巷道数据建立精准的巷道三维模型,对于井巷工程设计、井下安全生产、灾害预警及煤炭精准开采具有十分重要的意义[1-6]。矿山井下巷道错综复杂、数据量大,如何快速、自动地建立任意断面形状的巷道三维模型是目前研究热点。
许多学者从不同角度对井巷工程三维建模进行了大量研究,如文献[7]研究了狭长型海量巷道点云数据精细建模问题,设置不同三角网边长阈值对点云数据进行分析与处理,实现了对巷道实体对象的全景建模;文献[8]提出基于近景摄影测量技术的地下巷道三维建模方法;文献[9]将由结点和中心线表示的巷道骨架模型剖分成简单巷道体和复杂巷道体,然后对其进行集成构成三维巷道网络模型;文献[10]提出基于特征断面的巷道三维建模思想,并建立巷道三维模型;文献[11]研究了基于草图输入的煤矿巷道模型生成方法;文献[12]通过巷道底板中线等特征线和断面参数,采用分段建模算法建立三角形条带巷道三维模型;文献[13]采用几何要素构建三维精细巷道数据库,从而建立巷道模型;文献[14]引入参数化建模技术,生成不同类型巷道的三维模型;文献[15]对矿山井巷工程数据特征进行分析,抽象出井巷工程二三维数据结构及建模方法,根据巷道测量数据建立三维巷道模型;文献[16]提出一种基于实测数据的巷道系统三维自动建模方法。
从以上分析可知,已有的巷道三维建模研究各有特点,这些研究在巷道交岔点三维建模方面进行了有益探索,但对于复杂巷道中的特殊交岔点处理算法还有待进一步深入研究。要实现巷道自动化建模,首先需要解决包含任意断面形状、特殊交岔点的巷道建模问题。本文基于文献[17]的研究成果,改进并完善了巷道建模算法,研究了基于布尔运算的特殊交岔点建模算法。
1 巷道断面建模
巷道的断面形式决定着巷道的空间形态,也是构建三维巷道模型的数据源之一[18-19]。对于不同地质条件下的巷道,其断面的形状、宽度、高度不同。最常见的巷道断面有:半圆拱形、梯形、三心拱形、圆形、切圆形、马蹄形等。为适应各种类型断面的自动化建模要求,本文采用六元组表示不同断面形状,各断面六元组参数及其含义描述如下:
1.1 圆拱形断面
圆拱形断面参数包括:WL、WR、HL、HR、Fz、Fm,各参数含义为:WL表示左宽,WR表示右宽,HL表示左高,HR表示右高,Fz/Fm表示拱形顶的矢跨比,且1≤Fz≤9,1≤Fm≤9。
当HL=HR,且Fz=1,Fm=2 或Fz=0,Fm=0,生成半圆拱形断面。半圆拱形断面示意图如图1 所示。
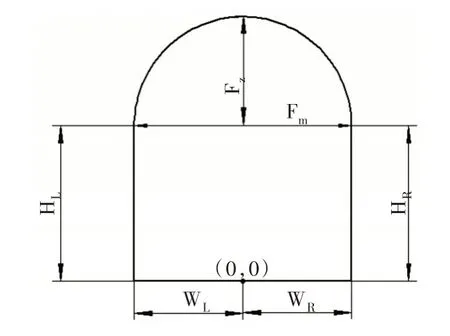
Fig.1 Circular arch section(HL=HR)图1 圆拱形断面(HL=HR)
当HL≠HR,Fz=R,Fm=0,生成的圆拱形断面如图2 所示。当R>(WL+WR)/2,取min(HL,HR)为墙高。
当HL≠HR,且10<AngleL<90,10<AngleR<90 时,生成切圆顶断面,墙高为min(HL,HR);当AngleL=90,AngleR=90 时,生成半圆拱形断面。切圆顶断面示意图如图3 所示。

Fig.2 Circular arch section(HL≠HR)图2 圆拱形断面(HL≠HR)
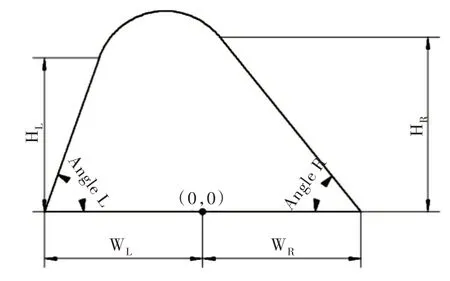
Fig.3 Truncated dome section图3 切圆顶断面
1.2 三心拱形断面
三心拱形断面参数包括:WL、WR、HL、HR、Fz、Fm,各参数含义为:WL表示左宽,WR表示右宽,HL表示左高,HR表示右高,Fz/Fm表示拱形顶的矢跨比,且1≤Fz≤9,1≤Fm≤9。三心拱形断面示意图如图4 所示。
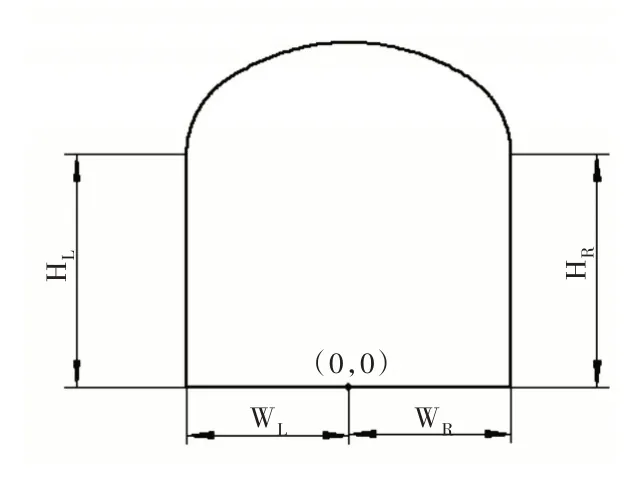
Fig.4 Triaxial arched section图4 三心拱形断面
1.3 梯形断面
梯形断面参数包括:WL、WR、HL、HR、AngleL、AngleR,各参数含义为:WL表示左宽,WR表示右宽,HL表示左高,HR表示右高,AngleL 表示左墙倾角,AngleR 表示右墙倾角,当AngleL=90,AngleR=90 时,生成矩形断面。梯形断面示意图如图5 所示。
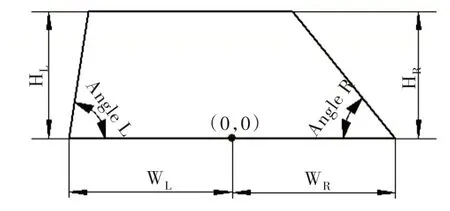
Fig.5 Trapezoidal cross-section图5 梯形断面
1.4 圆形断面
圆形断面参数包括:R、H、HL、HR、Fz、Fm,各参数含义为:R 表示圆形断面半径,H 表示高度,HL、HR、Fz、Fm取值为0。当R>H 时,圆形断面如图6(a)所示;当R=H,圆形断面如图6(b)所示。

Fig.6 Circular cross-section图6 圆形断面
1.5 马蹄形断面
马蹄形断面参数包括:WL、WR、HL、HR、F0、F1,各参数含义为:WL表示左宽,WR表示右宽,HL表示左高,HR表示右高。当F0=0 时,生成低马蹄形断面;当F0=1 时,生成高马蹄形断面。F1表示侧拱的圆心到对边的距离。低马蹄形断面如图7(a)所示,高马蹄形断面如图7(b)所示。
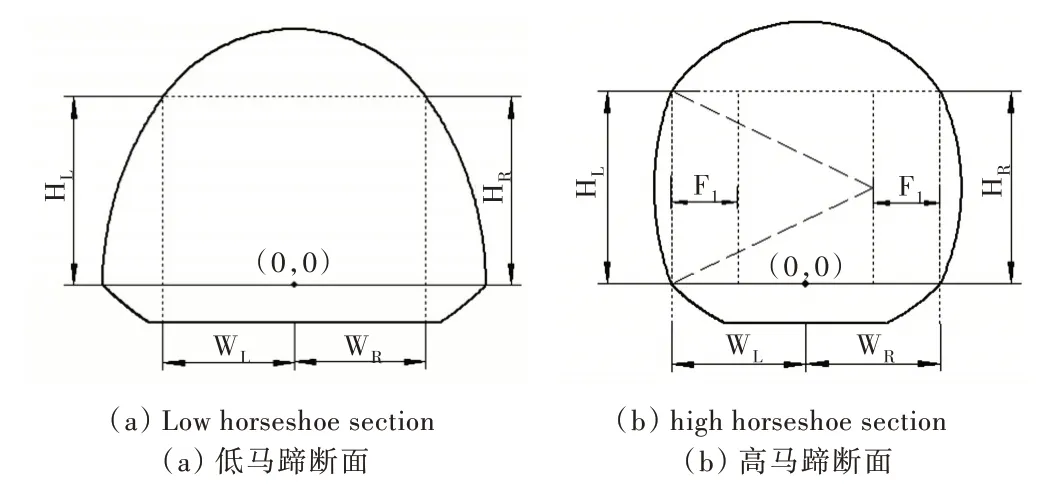
Fig.7 Horseshoe section图7 马蹄形断面
1.6 断面连接
巷道建模时,根据测量数据为每段巷道的起始点和终点设置断面属性,在巷道结点连接处建立相应交岔点,交岔点与对应巷道段连接,可根据实际工程需要分别生成简易的拆线交岔点和插值处理交岔点模型。如图8 所示,巷道二叉点由六元组(3,3,3,3,1,2)马蹄形断面和六元组(3,3,3,3,0,0)半圆拱形断面构成,图8(a)为折线模型,图8(b)为对交岔点进行光滑处理后的模型。如图9 所示,巷道二叉点由六元组(3,3,3.5,3.5,70,70)梯形断面和六元组(3,3,3.5,3.5,70,70)倾斜墙圆拱形断面构成,图9(a)为折线模型,图9(b)为对交岔点进行光滑处理后的模型,巷道的底板、侧帮和顶板精度可由参数进行控制(彩图扫OSID 码可见)。
2 算法设计
建立精准的巷道三维模型首先要解决各类巷道交岔点的建模问题。对于巷道交岔点建模,文献[20]利用穿尖交岔点和马门头所共有的巷道相交特征建立交岔点模型,通过多段线逼近的方式对曲线巷道的拐弯处进行处理,以保证巷道交岔点处的连通性。在巷道三维建模时,垂直巷道交岔点建模是一个难点,建模时不仅要保持空间的独立性,还要保持其内部之间的连通性。
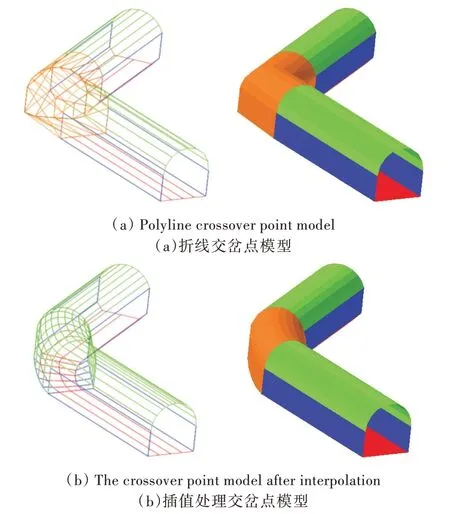
Fig.8 Connection between a horseshoe section and a semicircular arch section图8 马蹄形断面与半圆拱形断面连接
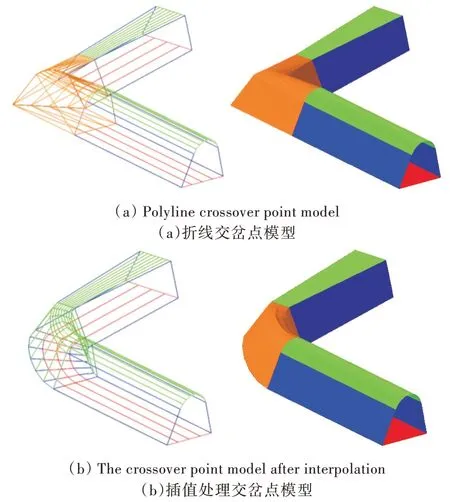
Fig.9 Connection between trapezoidal section and inclined wall arch section图9 梯形断面与倾斜墙拱形断面连接
目前大部分矿业软件在巷道建模过程中没有很好地处理垂直交岔点,通常采用圆柱体直接与平巷相连,其内部不连通,因此在巷道内进行碰撞检测时,不能从某一平巷经过垂直交岔点到达另一平巷,也无法在巷道中进行漫游等操作。由于垂直巷道与其它巷道的顶板、底板或侧帮相连接,很难采用传统的水平巷道交岔点连接方式。为了解决这类巷道的建模问题,实现巷道的自动化精细建模,本文基于实测的巷道测量数据,对垂直巷道建模算法进行改进。在垂直巷道与水平巷道连接时,首先建立垂直巷道和水平巷道的三维模型,然后采用布尔运算算法剪掉重叠的区域,从而实现对垂直巷道交岔点的三维建模。算法步骤描述如下:
Step1:将巷道所有连接关系分类为垂直连接和水平连接,设初始的垂直节点列表和水平节点列表为空。
Step2:计算每段巷道的倾角,若倾角大于α,则该巷道为垂直连接,巷道段始节点和终节点的垂直节点数加1;若倾角小于等于α,则该巷道为水平连接。
Step3:从垂直节点列表中,取一个还未访问的节点Pi,判断Pi连接的水平节点和垂直节点个数。
Step4:建立水平巷道模型。若Pi连接的水平节点个数等于0,则节点Pi是井口点,直接与地面相连,转Step5;若Pi连接的水平节点个数为m,则进行m 交岔点的水平巷道建模,生成巷道三维模型,记为s1.3dt。
Step5:建立垂直巷道模型。若节点Pi连接的垂直节点数为1,设与Pi相连的节点为Pj,则根据节点的断面形状及属性信息,连接节点Pi与节点Pj的断面,生成垂直巷道模型,记为c1.3d,转Step7。
Step6:若与节点P1相连的垂直巷道节点数为2,设与Pi相连的节点为Pj和Pk,判断3 个节点是否共线。若节点Pi、Pj、Pk共线,则直接将节点Pj与节点Pk的断面相连;若节点Pi、Pj、Pk不共线,则对Pi点的断面进行旋转后,分别与节点Pj和节点Pk的断面相连,生成垂直巷道模型,记为c1.3dt。
Step7:水平巷道模型与垂直巷道的布尔差运算。对水平巷道模型s1.3dt 与垂直巷道c1.3dt 进行差运算,生成节点Pi的垂直交岔点模型。
Step8:如果垂直节点列表不空,则转Step3,否则算法结束。
3 实验与应用
3.1 算法实验
本文以导线控制数据、断面参数及巷道属性信息为实验数据,建立巷道三维模型,导线控制数据坐标如表1 所示。
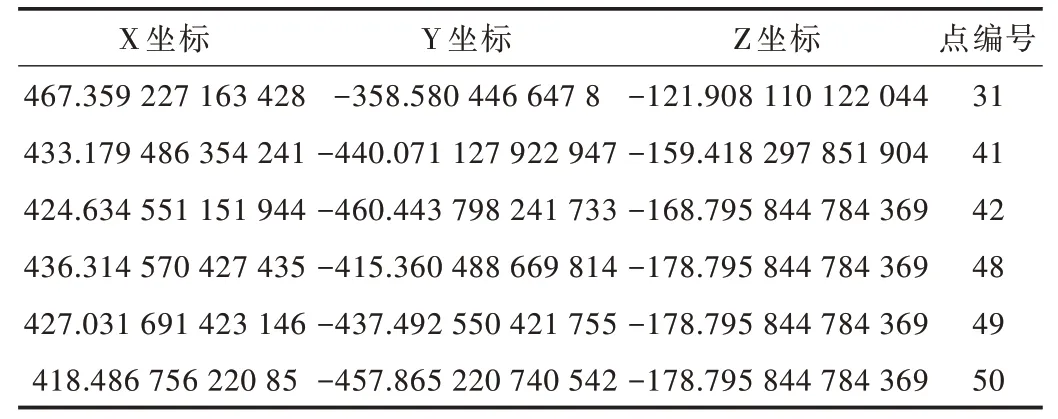
Table 1 Coordinates of traverse control data表1 导线控制数据坐标
巷道建模时在每个节点处将巷道分为直巷和交岔点两部分,然后对巷道的直巷和交岔点分别建模,直巷的建模效果如图10(a)所示。该实验数据有两个垂直交岔点,按照以上的垂直巷道建模算法步骤,建立垂直节点表中两个节点的垂直巷道交岔点。建模算法在垂直交岔点处分别生成水平段模型及垂直段模型,如图10(b)所示,对两个模型采用布尔运算算法实现垂直交岔点的贯通,如图10(c)所示。巷道建模时通常采用底板沿着测量导线数据进行拉伸的方式,适用于水平巷道建模。但对于垂直巷道,如果也采用该方式建模,垂直巷道与水平巷道只能部分连接,导致建立的巷道模型无法满足实际工程要求。为解决以上问题,对于垂直节点列表中的每个节点,在建立节点的垂直巷道模型时需要先把导线调整到巷道中心,然后将对应的巷道断面连接,实现垂直交岔点的完全贯通,贯通率达到100%。调整后的垂直巷道交岔点三维模型效果如图10(d)所示(彩图扫OSID 码可见)。
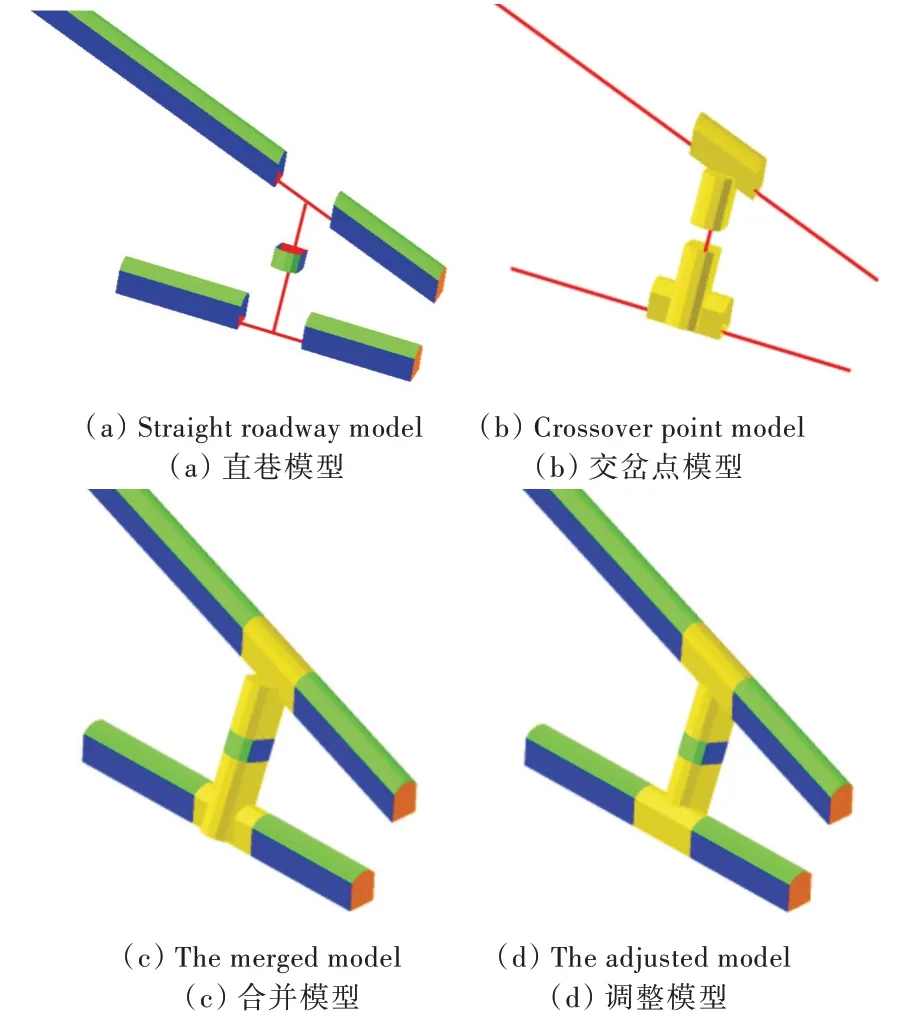
Fig.10 Three-dimensional modeling of vertical roadway intersection points图10 垂直巷道交岔点三维建模
3.2 应用实例
井巷工程三维建模系统在多个数字矿山建设过程中得到了广泛应用。以某煤矿煤巷与岩巷的测量导线、剖面图返填数据及局部调整数据作为建模数据,绘制二维巷道布置图,如图11(a)所示。在二维巷道布置图上配置巷道属性后进行巷道三维建模,生成的巷道三维模型如图11(b)所示。
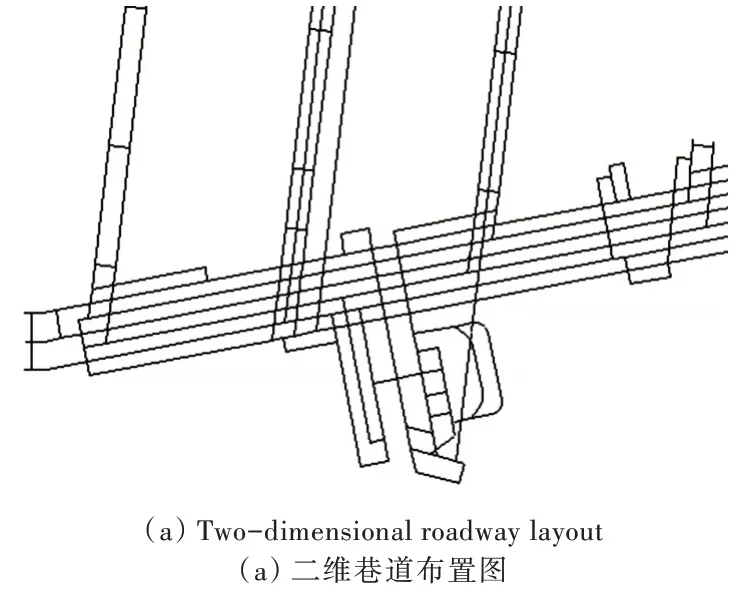
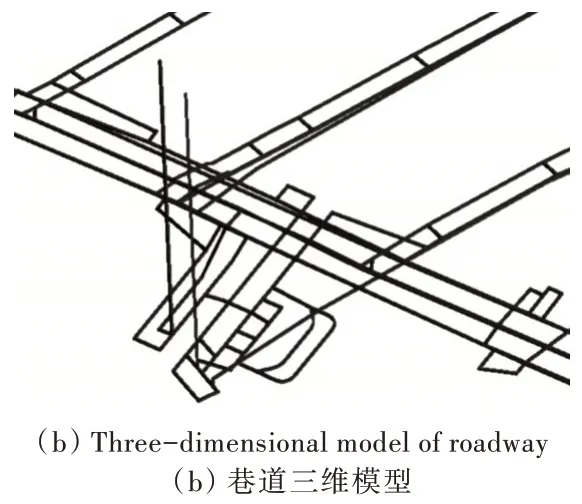
Fig.11 Two-dimensional layout and three-dimensional model of a roadway in a mine图11 某矿巷道二维布置图与三维模型
4 结语
井巷工程三维建模是实现煤炭精准开采的基础与保障,本文研究了巷道精准建模算法,采用六元组表示不同断面,灵活地控制巷道断面的底板、顶板及侧帮精度,采用布尔运算算法实现巷道垂直交岔点建模,并研制开发了巷道三维建模系统。该系统在付村煤矿、大海则煤矿等多个智慧矿山项目中得到了应用,验证了本文巷道建模方法的可行性。因此,该巷道精准建模系统在井巷工程设计与生产中具有广阔的应用前景。
猜你喜欢
石家庄铁路职业技术学院学报(2021年1期)2021-06-09
矿产勘查(2020年9期)2020-12-25
广东公安科技(2020年3期)2020-11-17
趣味(数学)(2019年10期)2020-01-15
现代装饰(2018年11期)2018-11-22
结直肠肛门外科(2018年6期)2018-02-11
江西煤炭科技(2015年1期)2015-11-07
山西焦煤科技(2015年7期)2015-02-28
机电产品开发与创新(2014年6期)2014-03-11
河南科技(2014年19期)2014-02-27