
一种轻简型附子机械化收获装置初探*
2021-01-29 07:23:20蒋辉霞李光辉万先起罗俊
四川农业与农机 2020年6期
蒋辉霞 李光辉 万先起 罗俊
四川省农业机械研究设计院,四川成都
附子具有回阳救逆、补火助阳、散寒止痛的功效,用于亡阳虚脱、肢冷脉微、心阳不足、胸痹心痛、虚寒吐泻、脘腹冷痛,分布于我国四川、陕西、贵州、湖南、湖北、甘肃、云南、广西、江西、安徽等地。传统的附子收获以人工方式为主,收获效率低、劳动强度大。随着城镇化进程的不断推进,大量青壮年劳动力外出务工,这种由于收获期较短等因素导致的用工量较大的劳动密集型作业方式遇到了劳动力急剧短缺的现实生产问题,亟需解决。本文根据上述问题,在综合考虑了四川丘陵地区附子种植地块较小、种植户操作实用性等方面的情况下,进行了一种轻简型附子机械化收获装置初探。
1 方案初探
附子机械化收获装置主要由动力装置、传动装置、行走装置、挖掘装置和操纵装置组成。
1.1 动力装置
1.1.1 动力输出方式
根据挖掘作业需要瞬时提供较大的输出动力、移动作业的特点和行走需要持续提供克服较大的地面阻力及自身重量的动力需求特性,综合确定采用合适的动力输出方式。
1.1.2 动力配置参数
根据挖掘装置挖掘深度、入土角度等,确定作业动力功率需求;根据行走装置的宽度、行走方式、行走速度等,确定行走动力功率需求;再结合作业时间、作业效率等,综合确定总动力功率配置参数。
1.2 传动装置
1.2.1 传动方式
动力装置通过传动装置将作业、行走等所需动力传递给相应的执行机构,根据挖掘和行走的作业、行走方式,综合采用变速箱齿轮传动、链条传动等方式。
1.2.2 传动配置参数
根据挖掘质量和行走速度等功能要求,综合确定挖掘和行走传动变比等参数配置,满足装置连续作业对动力高效可靠传动的需求。
1.3 行走装置
1.3.1 行走装置宽度
根据附子行距种植要求,根据收获期长短、作业效率要求、动力配置大小等,因地制宜确定适宜的行走装置宽度。
1.3.2 行走方式
根据附子土壤类型、土壤黏度、收获期的气候条件、种植地块起垄高度、深度、沟宽等综合分析,采用轮式行走方式。
1.3.3 行走速度
根据附子收获对行走平稳、重心稳定等安全性指标和对收净率、破损率等技术性指标的要求,结合种植区域的地块大小、坡度范围,确定适宜的安全行走速度,既满足生产效率需求,又确保安全可靠运行。
1.4 挖掘装置
1.4.1 挖掘深度
挖掘深度按照附子土壤下深度主要分布范围、收获装置收净率、破损率等技术性能指标及安全性能指标要求等综合考虑确定。
1.4.2 入土角度
入土角度对附子收获质量、整机配套功率等均会产生影响,按照附子种植土壤类型、入土阻力大小等综合考虑确定。
1.4.3 挖掘装置长度
挖掘装置长度应满足能将挖掘出来的附子和泥土进行初步分离的要求,过长不利于整机重心的稳定,过短不利于附子和泥土的分离,根据作业效果反复试验确定适合的长度。
1.5 操纵装置
1.5.1 操作方式
立足四川丘陵地区附子种植地块较小、主要使用者和操作者为附子种植户,该装置的操纵要方便、简单,且在一行附子收获完成切换到另一行收获时,要易于调整方向,转向要灵活、连续且转弯半径要小。鉴于上述情况,本文操纵装置采用手扶式。
1.5.2 操作杆长度
操纵杆长度综合考虑操作的省力性、安全性,转向的灵活性,挖掘装置的长度等因素合理确定。
轻简型附子机械化收获装置三维示意图如图1所示。
2 装置特点
本装置是在附子种植区域进行实地调研基础上,根据当地实际生产需求而进行的初步探索,具有以下特点。
1)结构紧凑。本装置按照作业和行走需求,将各组成部分在满足重心稳定的情况下进行合理布局,极大地减小了装置体积,转弯灵活。
2)适用性强。本装置采用轻简型设计,作业效率和挖掘质量能较好满足收获期的时间需求,有效突破了丘陵地区附子种植地块较小的限制,适用范围较广。
3)安全性高。立足于普通附子种植户的操作水平,采用手扶式设计,操作人员能很好控制其行走速度,进行移动挖掘作业,安全性高且操作简便。
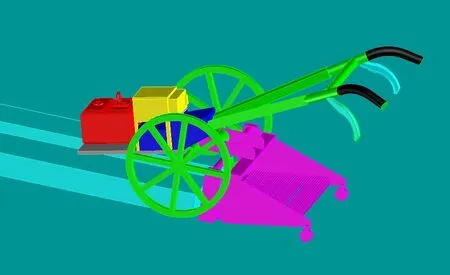
图1 轻简型附子机械化收获装置三维示意图
3 结束语
本文以提高附子收获效率、降低劳动强度,解决附子收获劳动力短缺的现实生产问题为出发点,以四川丘陵地区附子种植地块较小、种植户容易接受和易于操作的机械化装置需求为约束边界条件,进行了一种轻简型附子机械化收获装置初探,以期为有效解决附子生产收获环节的用工、效率等方面的问题提供参考和借鉴。
猜你喜欢
物流技术与应用(2022年8期)2022-08-26 04:10:54
中国民间疗法(2021年7期)2021-07-22 06:43:58
Digital Chinese Medicine(2020年3期)2020-12-14 15:27:06
物流技术与应用(2020年4期)2020-05-06 03:31:28
中国自行车(2018年8期)2018-09-26 06:53:30
制造技术与机床(2017年3期)2017-06-23 08:11:52
江苏年鉴(2014年0期)2014-03-11 17:09:37
中国中医药现代远程教育(2014年20期)2014-03-01 04:31:49
河南科技(2014年11期)2014-02-27 14:17:24
云南中医学院学报(2011年1期)2011-07-31 18:24:29
