火星车转移坡道机构展开策略分析与验证
2021-01-28 11:10:46鄢青青满剑锋
深空探测学报 2020年5期
鄢青青,刘 卫,满剑锋,朱 玛,周 东,刘 学
(北京空间飞行器总体设计部,北京 100094)
引 言
在星球巡视探测任务中,星球车一般不能直接降落在星球表面,需通过着陆器进行搭载,待着陆器软着陆后,通过转移机构安全转移至星球表面[1-2], 由于着陆器在星球表面软着陆时存在非常多的不确定性[3],因此展开策略对于星球车能否安全转移至关重要。前苏联月球车于1973年发射,安装了2个悬梯,布置在巡视器两侧,巡视器可选择前后任一悬梯行驶到月球表面[4-5]。“火星探路者”(Mars PathFinder,MPF)于1996年发射,火星车利用2条收拢在侧板上的柔性坡道进行转移,可根据地形等因素选择前后任一方向进行转移[6-7]。2003年发射的火星探测巡视器(Mars Exploration Rover,MER)继承了MPF的着陆平台,着陆器侧板展开后,连接在侧板之间的纤维布随之展开,在MER的3个方向形成柔性转移坡道,MER火星车可根据情况选择其中的任意1个通道进行转移[8-9]。2013年12月2日,中国发射“嫦娥3号”探测器,“玉兔号”月球车在转移机构展开后移至月球表面,该转移机构为固定方向展开[10-11]。由目前的探测器可知,转移机构的数量决定了可供星球车转移的通道数量,可供星球车转移的通道数量越多,星球车安全转移至星球表面的可靠度越高。
以火星巡视探测任务为背景,受限于包络空间,巡视器无法安装2套火星车转移坡道机构,针对有限的1套坡道机构,为实现2个方向的火星车转移通道,在不更改原有机构的前提下,本文提出了一种双向可选的自主展开策略,通过坡道机构与数管软件进行联试试验,验证了自主展开策略的可行性及有效性。
1 坡道机构展开原理
为了便于分析,定义着陆器坐标系(O-XYZ)为全局坐标系,坐标系原点O位于着陆器平台上表面的几何中心;X垂直于着陆器平台的表面,向上为正;Z轴与着陆平台上的坡道平行,指向卷筒组件方向为正;Y轴方向根据右手定则确定,如图1所示。坡道机构展开工作过程为:①坡道在发射段及地火转移段、着陆段处于收拢压紧状态;②待着陆器安全着陆在火星表面后,火工品解锁,根据着陆条件开展分析并最终确定坡道机构的展开方向;③当抽展到预定位置后,坡道机构在摆转装置及重力矩作用下,进行自然摆转直至接触地面,形成供火星车转移的通道;④火星车通过坡道从着陆平台驶入火星表面。
由于坡道机构展开的成功与否直接决定火星车能否顺利转移至火星表面,为提高坡道成功展开的可靠性,落火后根据巡视器的姿态及地形条件,针对在轨可能的一系列故障,提出了坡道机构自主展开策略,实现了火星车2个方向(+Z或-Z方向)可选的转移通道,为其安全转移火面提供有力支撑。
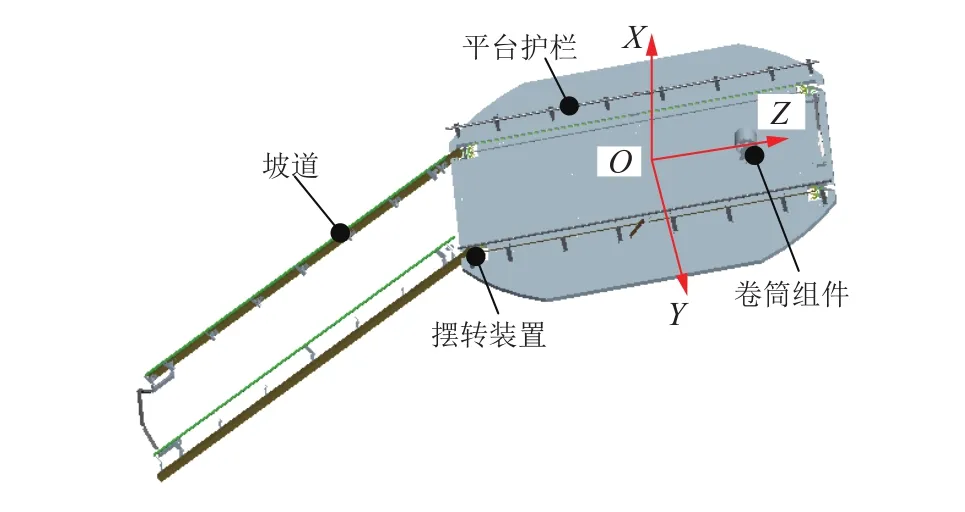
图1 全局坐标系定义Fig. 1 The definition of global coordinate system
2 自主展开策略分析
作为坡道机构的传动部分,卷筒组件在电机驱动作用下实现抽展,电机采用双绕组备份。为防止电机过流,超过机构承受能力,设置了过流阈值,同时在坡道机构运行过程中对电机电流、转向等参数进行遥测,当抽展方向的两个到位开关均为到位状态,则电机断电,认为坡道机构摆转到位。
在抽展过程中,针对落火后可能出现的故障,设计了以下故障工作模式:
1)若运行过程中遇到小石子、堆积的灰尘等,绕组电流异常过大时,说明机构阻力很大,不能正常工作,对电机进行断电并进行反转控制,将坡道退回一段距离后再重新尝试展开动作,此为倒转模式,该模式下过流阈值使能。
2)若倒转模式无法突破障碍时,则切换至点动工作模式,电机进行短时间工作,点动模式下电流阈值高于正常模式及倒转模式下的电流阈值,用以确保坡道机构能短时大力越过障碍。
3)若运行过程中主绕组输出力不足或者不工作时,则切换为备绕组继续工作,提高机构可靠性。
4)若点动模式亦无法突破障碍,则认为该方向无法实现展开,此时控制电机反转,将坡道机构沿另一方向进行展开,确保任务成功。
综合以上故障工作模式,提出了一种双向可选的坡道机构自主展开策略,如图2所示。在火工品解锁后,坡道机构自主展开流程如下:
1)数管软件按照落点信息判断展开方向并控制坡道机构电机运动。
2)坡道初始抽展,电流正常,则坡道以正常模式继续运行。若电机过流,则进入倒转模式。
3)倒转模式3次后,若电机过流,则进入点动模式,点动模式中对电流进行监测:
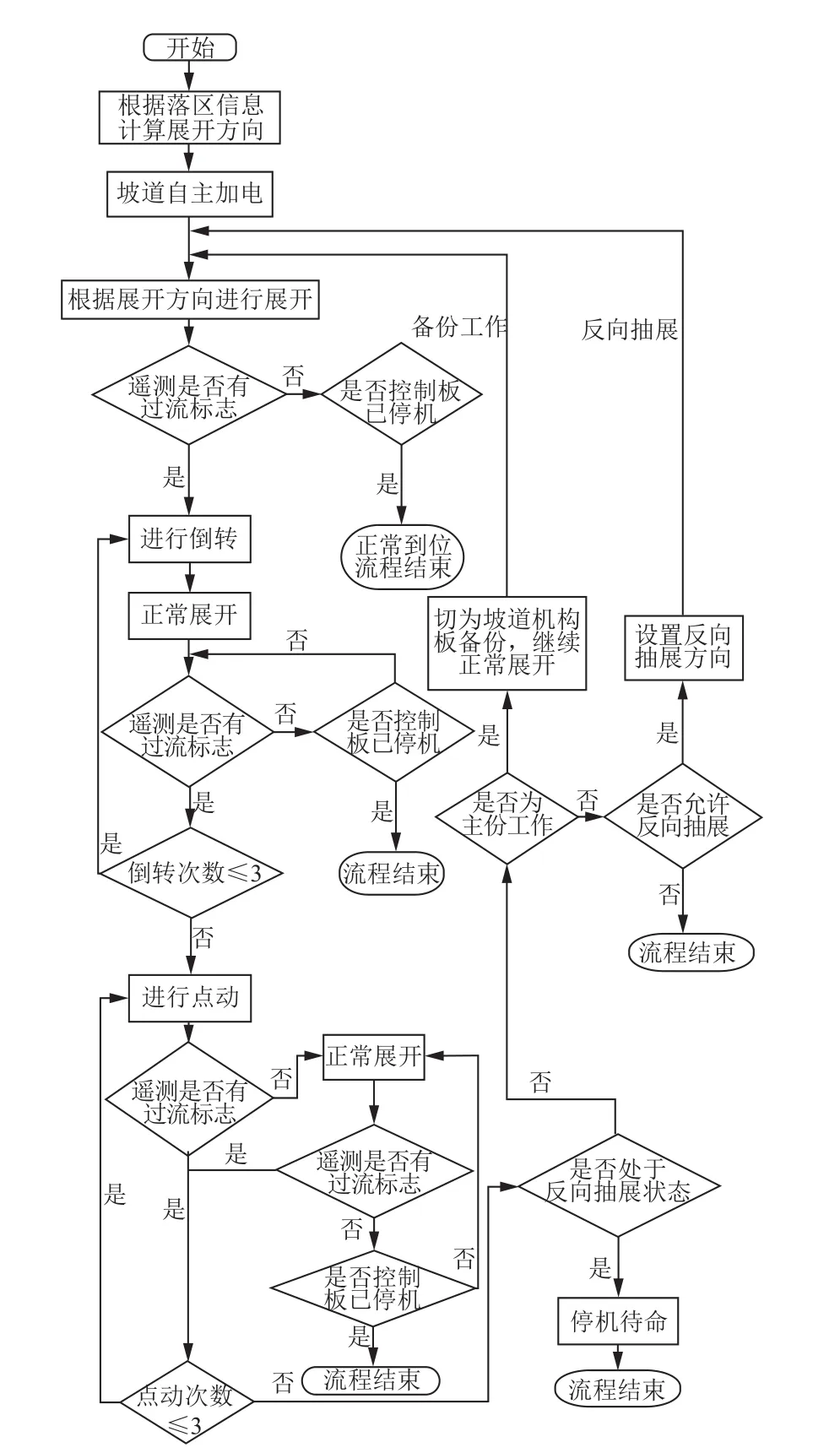
图2 坡道机构自主展开策略Fig. 2 Autonomous deployment strategy of transfer ramps
(1)若点动模式中电流正常,则仍以正常模式继续运行;
(2)若点动模式中,电机过流,则再次以点动模式运行,最多3次点动。
4)若点动次数达到3次时,电机仍过流,若电机为主份工作,则切至备份,采用备绕组,从步骤 1)重新开始流程,若已是备份工作,则判断反向抽展是否使能:
(1)若使能,则坡道反向抽展;
(2)若不使能,则停机待命。
5)坡道反向抽展后,电机正常模式运行过程中,检测到电机过流,则先进入倒转模式;倒转模式3次后,如电机过流,再进入点动模式。
6)坡道反向抽展、点动模式后:
(1)若点动模式中电流正常,则仍以正常模式继续运行;
(2)若点动模式中,电机过流,则再次以点动模式运行,最多3次点动;
(3)若点动次数达到3次,仍出现电机过流,则停机待命。
3 展开策略试验验证
为验证坡道机构自主展开策略的可行性及有效性,进行了坡道机构与数管软件联试试验。通过在坡道上各设置2个气球用于模拟火星3/8g的重力场条件,同时在坡道展开路径上( ±Z方向)各设置足够重的障碍物,如图3所示,模拟坡道机构双边受堵而无法展开工况,用以对坡道机构自主展开策略进行全面覆盖及验证。
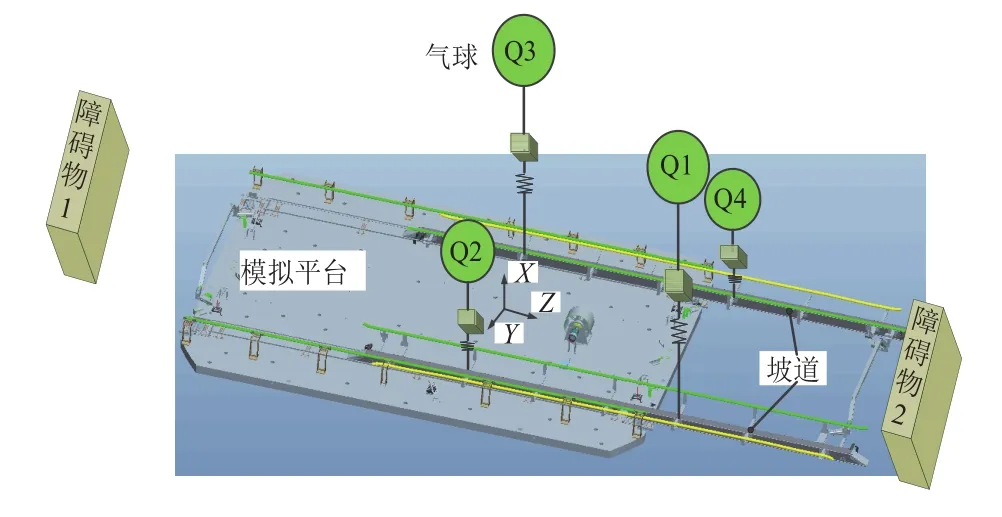
图3 坡道机构与数管软件联试试验方案Fig. 3 The joint test of transfer ramps and data management software
参加联试试验为装配完整的坡道机构,呈收拢状态安装在模拟平台上,如图4所示,试验人员通过手动拔销解锁后,数管软件驱动坡道机构,按正常模式沿-Z方向展开,直至遇障碍物1而过流停机,随后切换为故障模式展开,由于电机输出力矩不足以推翻障碍物1,坡道机构反向抽展,按正常模式沿+Z方向展开,直至遇障碍物2而过流停机,随后切换为故障模式继续展开,由于输出力矩亦无法推翻障碍物2,最后电机停机,坡道机构抽展待命。
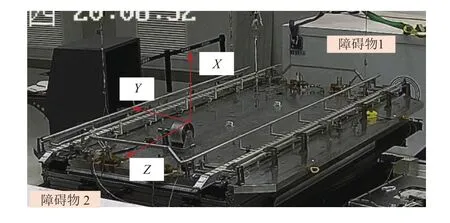
图4 坡道机构安装至模拟平台上Fig. 4 Installation of transfer ramps on simulation platform
图5为坡道机构自主展开策略验证示意图,正常模式展开过程中电机电流稳定在0.07 A左右,其中-Z方向故障模式展开分析见图6,+Z方向故障模式展开分析见图7。当坡道机构沿-Z方向展开第一次过流停机后实现了3次倒转及3次点动(遇障碍物1),均未能克服阻力,则电机由主份切为备份工作,再次尝试展开,过流停机后又进行了3次倒转及3次点动(遇障碍物1),均未能克服阻力,此时坡道机构尝试反向抽展(沿+Z方向),同样在第一次过流停机后(遇障碍物2),实现了3次倒转及3次点动,均未能克服阻力,则电机断电停机。
综上可知,坡道机构双边受堵无法展开工况覆盖了自主展开策略里的全部流程,电流、运动状态及过流状态等遥测参数正常,充分验证了坡道机构自主展开策略的可行性及有效性,且电机从运行开始至断电停机共耗时864 s,考虑到联试过程中障碍物摆放位置未能达到坡道机构运行最远端,因此坡道机构自主展开策略最长路径耗时应不少于864 s。
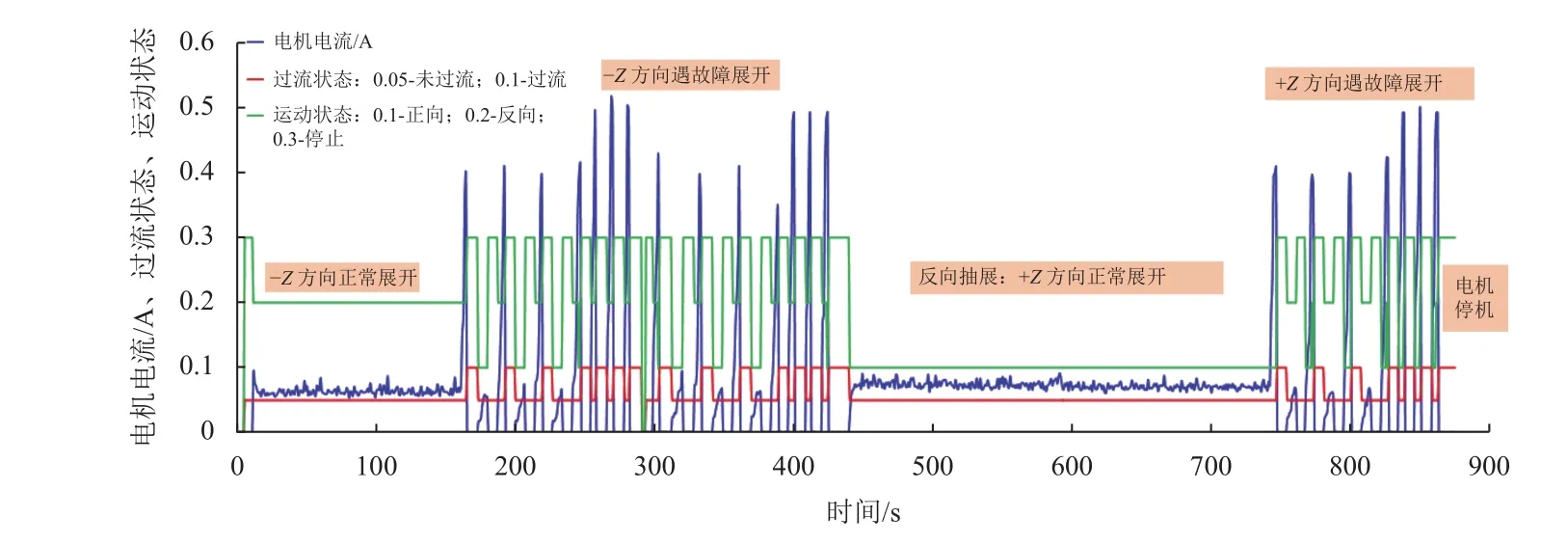
图5 坡道机构双边受堵时自主展开策略验证Fig. 5 Verification on deployment strategy of transfer ramps when two sides are blocked
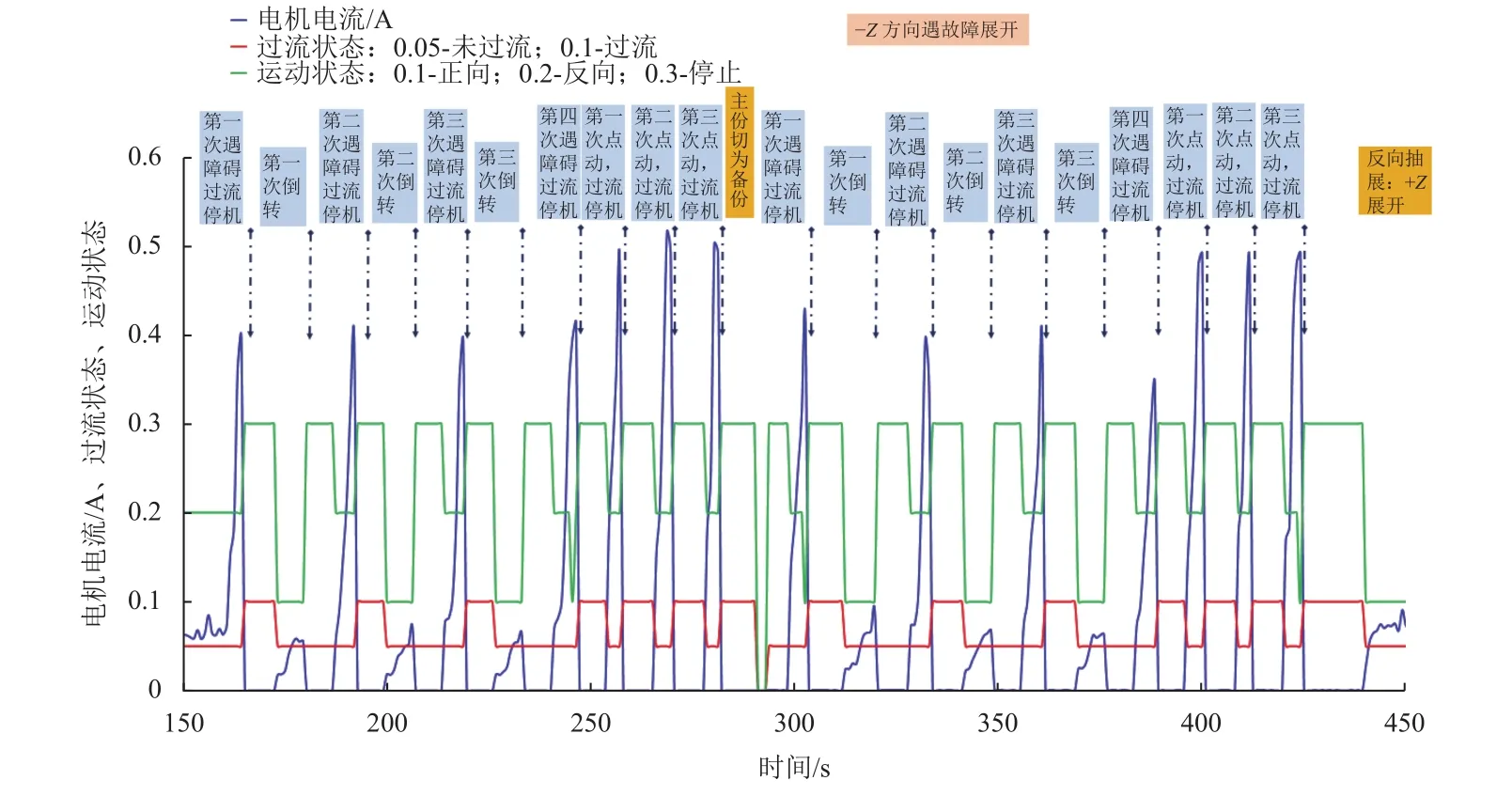
图6 坡道机构沿-Z方向遇故障展开过程分析Fig. 6 Analysis on failure deployment to the -Z direction of transfer ramps
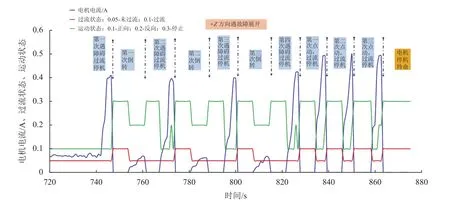
图7 坡道机构沿+Z方向遇故障展开过程分析Fig. 7 Analysis on failure deployment to the +Z direction of transfer ramps
4 结 论
受限于包络空间,巡视器无法安装2套火星车转移坡道机构,针对有限的1套坡道机构,考虑其在轨可能出现的各种故障,在不更改原有机构的前提下,本文提出了一种双向可选展开的自主展开策略,实现了一套转移机构可提供2个转移通道的突破。通过将坡道机构与数管软件进行联试试验,模拟坡道机构双边受堵而无法展开工况,试验过程中各项遥测参数正常,全面覆盖了自主展开策略的各项流程,充分验证了坡道机构自主展开策略的可行性及有效性,为火星车顺利转移至火面提供可靠保障。
猜你喜欢
军事文摘(2023年2期)2023-02-17 09:20:46
红领巾·探索(2022年11期)2023-01-06 09:19:16
汽车实用技术(2022年15期)2022-08-19 02:29:52
露天采矿技术(2022年1期)2022-02-20 03:48:08
小哥白尼(神奇星球)(2020年12期)2021-01-18 05:36:16
军事文摘(2020年18期)2020-10-27 01:54:22
电子制作(2017年19期)2017-02-02 07:08:58
电子制作(2016年11期)2016-11-07 08:43:36
水电站机电技术(2016年1期)2016-02-28 14:21:50
湖州师范学院学报(2015年4期)2015-03-11 16:39:43