
无人星球车非几何障碍感知研究进展
2021-01-28 11:10张天翼
深空探测学报 2020年5期
张天翼,彭 松,田 鹤
(1. 北京空间飞行器总体设计部,北京 100094;2. 吉林大学 机械制造及其自动化系,长春 130025)
引 言
星球车是一种适应星表复杂环境、具有移动勘测能力的航天器,通过携带科学仪器在星面移动,对目标科学点展开近距离和接触式考察。在深空探测实践中,星球车巡视探测过程是器地交互、地面持续支持的过程[1]。随着深空探测任务的不断加强,目标星体距地距离增大,时延和通信带宽严重影响遥操作模式的实时性,器地交互频次会影响探测进程,因而提升星球车自主导航性能迫在眉睫。
星球表面沙石遍地,沟壑纵横,属于典型非结构化环境,星球车预先对工作环境仅有粗略了解,若要实现长距离正常行驶并安全到达指定工作点,星球车需完成环境感知、位姿估计、路径规划、运动控制、安全监测等环节[2]。环境感知是车体内部系统与外部环境的纽带,通过星球车搭载的传感单元获取周围探测环境信息,为后续路径规划、运动决策等环节提供基础信息。其中,获取障碍信息是环境感知环节的重要任务,通过检测环境中的危险地貌进行地形评估,从而构建可通过性地图,选取最佳行驶路径。由此可见,有效的障碍识别是星球车安全高效行驶的前提,也是提高星球车自主性能的关键。
星球车面临的环境障碍可分为几何障碍和非几何障碍[3],几何障碍为完全基于其几何特性而被视为不可穿越的任何对象和地形特征。在近来的巡视任务中,多采用立体视觉三维重建生成巡视区数字高程模型(Digital Elevation Model,DEM),根据DEM中的地形变化,结合灰度、纹理信息完成岩石、凹坑和坡度等障碍识别[4]。非几何障碍则不能用形状表征,与星壤的力学特性紧密相关[5],最终以打滑、沉陷为故障表征形式。通往较高探测优先级科学目标点(如火山口)的线路通常涉及沙丘、低凝聚力土壤和斜坡等非几何障碍多发地形。相对于已形成完备感知技术体系的几何障碍而言,非几何障碍识别困难,会导致星球车牵引力及速度损失而造成严重后果,是环境感知中不可或缺的一环。
本文通过回顾已成功发射的无人星球车非几何障碍感知技术发展历程,归纳感知技术分为当前障碍估测和前方障碍预测两大类,分别针对这两类的国内外研究现状进行阐述和分析,总结启示,对未来发展进行展望。
1 非几何障碍感知技术研究进展
1.1 星球车非几何障碍感知技术概述
截至2020年7月,共有11辆星球车成功执行地外天体表面巡视探测任务。其中,除去美国“阿波罗15号”(Apollo-15)、“阿波罗16号”(Apollo-16)和“阿波罗17号”(Apollo-17)月球探测任务中的3辆载人月球车,共有8辆无人星球车成功执行任务。
由表1可知,应用于无人星球车非几何障碍感知技术集中于滑移估测和滑移预测两大类。前者旨在当前障碍状态监测,后者旨在识别前方潜在危险。对于星球车巡视而言,二者缺一不可。障碍状态监测信息可作为反馈变量对车体进行运动控制,在车轮下沉前及时检测障碍增大了脱险可能性[6]。障碍预测辅助规避前方风险,对于路径规划提供有效信息。
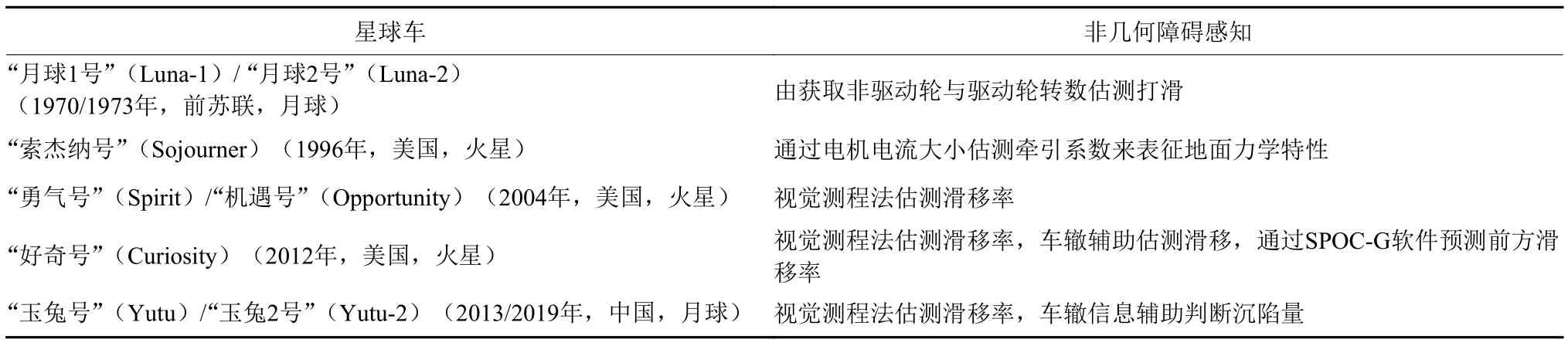
表1 无人星球车非几何障碍感知技术Table 1 Non-geometric hazard perception of unmanned planetary rover
接下来分别阐述当前非几何障碍监测和前方非几何障碍预测涉及的研究进展。
1.2 当前非几何障碍估测
非几何障碍表征形式多为沉陷、打滑,因而可通过监测星球车的车轮沉陷量及滑移率来判断当前非几何障碍危险程度。
1)车轮沉陷量估测
为直观获取沉陷量信息,可通过分析轮辙或轮地作用图像来实现。但由于有些星球车采用筛网轮,星壤颗粒会通过轮网间隙,造成轮辙表观沉陷量小于实际沉陷量[7]。故基于车辙进行沉陷量估测具有局限性,首选轮地作用图像进行沉陷量估测。
2004年,Iagnemma[8]率先提出基于轮地作用图像的车轮沉陷检测。首先通过车轮内外直径提取车轮边缘点,定义一个环形感兴趣区域(Region of Interest),如图1所示,将其分为Sright和Sleft两部分以区分车轮进入区域和离去区域。分析区域内各点的灰度,具有极大灰度变化的点即为轮地接触的边缘点。Reina等[9-10]沿着车轮半径同心圆轮廓,每隔1°计算图像灰度差异,灰度差异大的地方为车轮与沙地的接触边缘点。Hegde等[11]基于彩色图像,运用最小二乘法逼近边缘曲线,利用映射矩阵转换到车轮平面内,在车轮平面计算车轮沉陷量与轮地接触角[12]。吕凤天等[13]采用边缘检测算法提取车轮边缘轮廓线,通过摄像机成像原理校正图像平面。
综上,通过图像分割、轮地作用边界特征提取、图像校正、坐标转换等环节可得到实时沉陷量大小,一方面实时监测当前沉陷状态,另一方面由沉陷量可求得进入角的值,为星壤参数识别提供信息。
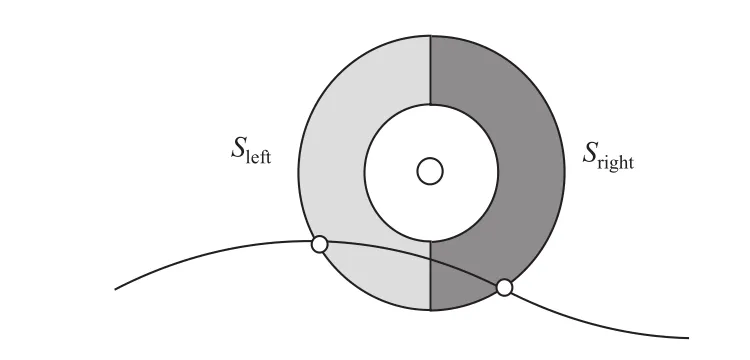
图1 基于轮地作用图像的车轮沉陷量估测[8]Fig. 1 Estimation of wheel sinkage based on wheel-ground interaction image[8]
2)滑移率估测
由表1可知,星球车发展历程中曾采用多种方法估测滑移信息。“月球1号”/“月球2号”和“索杰纳号”采用的是基于车轮转数及基于电机电流方法,该方法在不平整表面精准度不高。2004年后,Nister等[14]提出的基于视觉里程计(Visual Odometry,VO)的滑移率估测技术被应用于星球巡视任务,通过匹配序列图像与车轮转速结合估测当前滑转率。该方法估测精度高,但有以下局限性:① 序列图像匹配计算成本高,每次计算约3 min[15];② 在地表特征稀疏或阴影区域特征点匹配受限;③ 不适用于高速运行环境(> 0.8 m/s),高速运动环境中图像会出现模糊效应[16]。
针对VO计算复杂且需受限于地表特征点获取的问题,Ding等[17]提出通过单目视觉基于车辙痕迹的滑移率检测方法。Li等[18]分析车辙形成机理建立轮刺空间轨迹方程,建立基于车辙图像时域特征的滑移率估测模型。受时域频谱周期性启发,进而提出基于车辙频域特征的滑移率估测方法,提升了估测算法的鲁棒性[19]。吕凤天等[20]基于轮地图像提取车辙边界估计车轮前进速度,结合追踪车轮标记点得到的车轮旋转速度进行滑移估测。
Gonzalez等[6]通过机器学习算法将滑移数值检测问题转化为分类问题,将滑移水平分为低滑、中滑、高滑。基于惯性测量单元(Inertial Measurement Unit,IMU)信号,采用监督学习方法(支持向量机(Support Vector Machines,SVM)、人工神经网络(Artificial Neural Network,ANN))和无监督学习方法(K均值聚类(K-means)、自组织映射(Self- Organizing Mapping,SOM))实现滑移等级评估。算法具有计算精度高、运算速度快、存储空间小等优势,且克服了图像对于环境特征的依赖性。Gonzalez[21]随后针对信号选取、IMU置放位置、车辆速度、机器学习算法等直接影响估测结果的细节进行了探究。
综上,星球车中常见的滑移估测方法如图2所示[22],按照获取信息来源可分为基于外部传感器和基于本体传感器两大类。外部传感器以视觉相机为主,已广泛应用于星球车巡视任务,但受限于星球车计算机配置及图像处理算法的复杂性,未能实现实时检测,且对于阴影或地形特征稀疏区域识别能力不足。机器学习算法的引入将滑移估测转化为滑移水平分类问题,基于不依赖于环境信息的本体传感器信息,提升了估测算法效率及鲁棒性,具有广阔的研究应用前景。
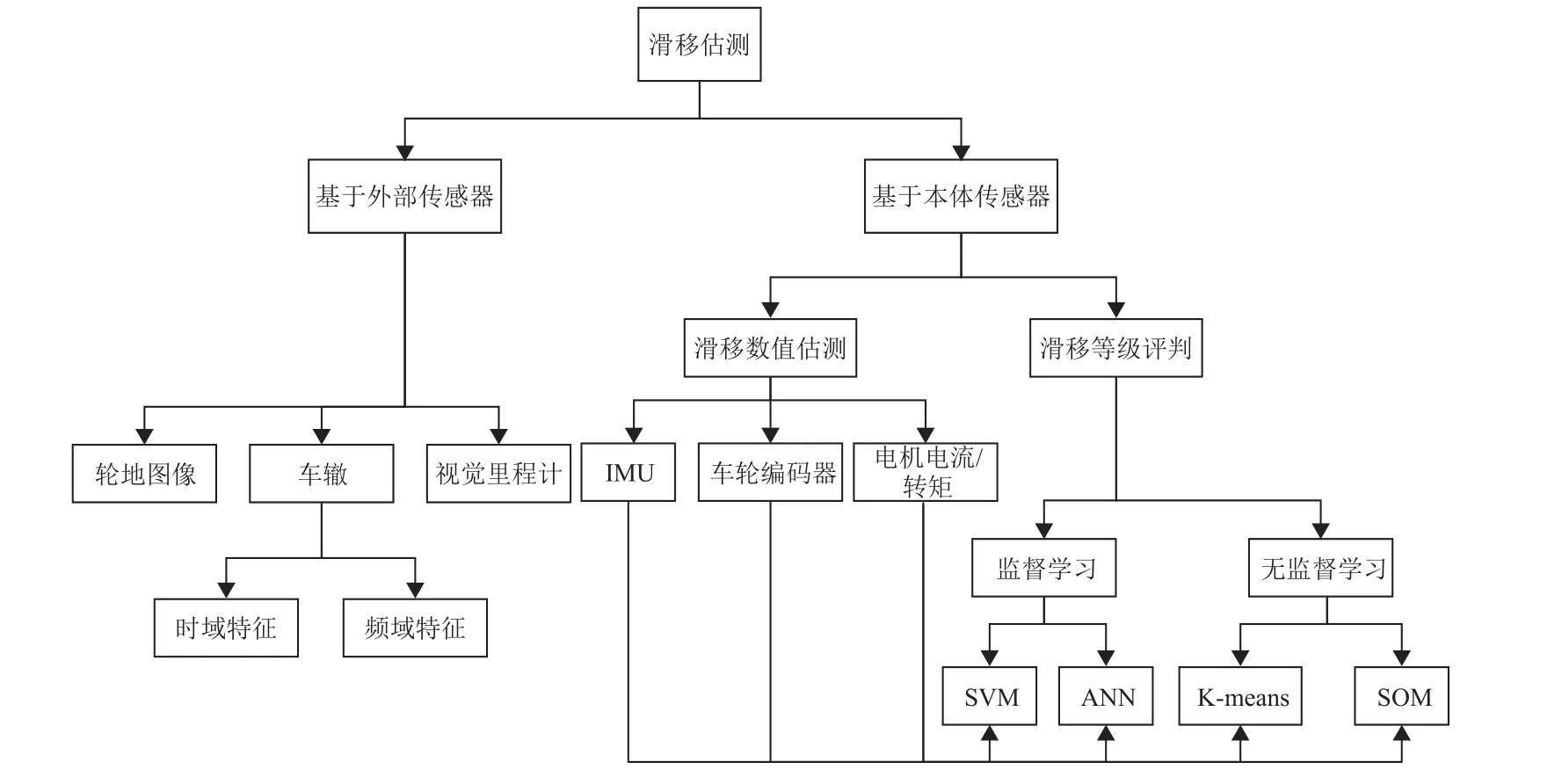
图2 星球车中常见的滑移估计方法[22]Fig. 2 Most common slippage estimation approaches for rovers[22]
1.3 前方非几何障碍预测
“勇气号”发生车轮沉陷,导致系统移动功能丧失,这表明仅障碍监测已不能满足星球车星表安全运行需求,需要展开对前方障碍预测的研究,通常选取滑移率作为预测量。滑移率的预测大致基于理论推导方法和基于实验测量方法两种[23]。基于理论推导的方法将星壤参数与滑移建立联系,基于实验测量的方法将地面类型与滑移建立映射关系。综上,星壤参数识别和地形分类是滑移预测中的关键技术。
1)星壤参数识别
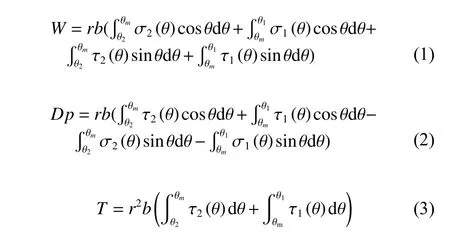
在深空探测中,轮式星球车因具有较好的移动性能而被广泛使用。经典轮壤相互作用力分析如图3所示[24],图3中参数说明详见文献[24]。在车轮与松软星壤的接触面上,作用力表现为连续的法向应力 σ 和剪切力 τ,分别基于Bekker承压模型和Janosi剪切力模型建立表达式。在水平地面上以恒定速度工作的车轮平衡可以通过方程(1)~(3)描述车体与星壤各自构成较为复杂的非线性系统,其中涉及到的星壤参数如表2所示。
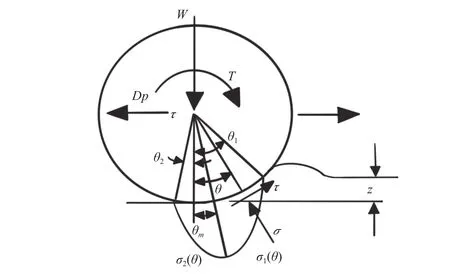
图3 半经验模型轮壤作用力分析图[24]Fig. 3 Semi-empirical model of wheel action[24]

表2 星壤参数Table 2 Parameter of soil
“海盗号”(Viking)着陆器和“索杰纳号”火星车分别通过机械臂和车轮进行挖沟实验,由离线分析技术获取火壤参数信息[25-26]。但离线分析技术限制了星球车行进自主性,星球车若要实现自主探测,需具备在线辨识星壤参数的能力。轮壤力学模型参数高度耦合,基于轮壤力学积分模型进行参数辨识可以保证星壤参数的准确程度,但若实现在线求解,难度极高。
表3列举了基于经典轮地力学模型的在线星壤参数识别相关研究。归纳可知,星壤力学参数的在线识别,多采用简化轮地力学模型进行非线性参数求解。基于应力线性化或积分求积简化模型。非线性参数求解多采用最小二乘法和牛顿迭代法,Meng[27]对比两种方法,结果表明牛顿迭代法具有更高的迭代速度,但是对于初值的依赖性较高,有必要对于初值阈值进行初步优化,因而在求解参数之前可先进行地形分类优化初值。
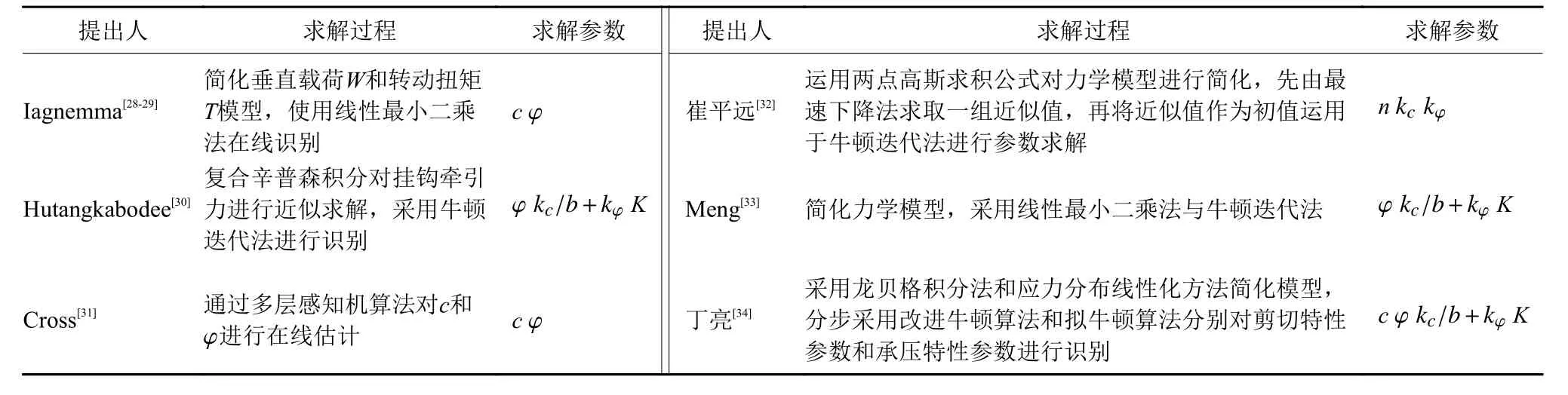
表3 基于经典轮地力学模型的星壤参数在线识别研究Table 3 Research on soil parameter online identification based on classic wheel-soil interaction mechanics model
经典轮地模型非常复杂,只能满足部分参数的在线识别。Liu等[35]通过分析Bekker模型中最大沉陷量出现处与最大应力点不一致的问题,引入新定义参数等效沉陷量zσ。实验验证了法向应力、剪切力均与zσ呈线性关系,故引入等效地形刚度Kσ和等效抗剪强度Kτ表征地形特性。
综上,星壤力学参数的在线识别有两条技术路径:① 简化经典轮地力学模型,进行常规星壤参数求解;② 改进经典轮地力学模型,引入或保留表征星壤特性的关键参数进行求解。方法②大大减少了待识别参数个数,为在线识别提供了新思路。
2)地形分类
与滑移估测分类相似,按照信息来源不同,用于非几何障碍识别的地形分类方法可分为两类:基于外部传感器和基于本体传感器。
基于外部传感器的方法主要依靠于相机,由地形纹理、色彩等特征判别地形。Howard等[35]基于图像纹理,通过ANN分类器,实现地面硬度、坡度、粗糙度类型识别,利用模糊集将地形特征转化为可穿越性语义。基于图像的地形分类技术已应用于地外无人探测任务,“勇气号”和“机遇号”火星车可以识别岩石和斜坡等视觉危险区域[36]。美国喷气推进实验室(Jet Propulsion Laboratory,JPL)开发了用于“好奇号”滑移预测的SPOC-G软件[23],建立起地形分类与滑移量间的映射关系。首先基于全卷积神经网络(Fully Convolutional Neural Networks,FCNNs)处理导航相机图像实现前方地形分类如图4所示,结合前方地形坡度,通过滑移-坡度模型预测滑移率。图5展示了两种滑移-坡度模型:地面校准模型(黑线)和高斯过程回归模型(红线),分别基于大量地面试验及“好奇号”星上滑移实例建立[37-38]。两种模型在小岩石、基岩地形中都表现出良好的预测性能。
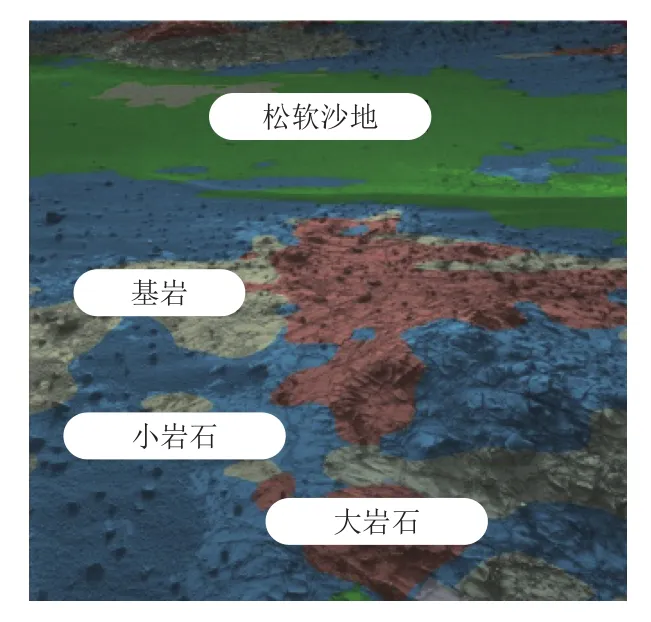
图4 “好奇号”导航相机图像地形分类预测示例Fig. 4 Examples of terrain classifier predicted classes in Curiosity Navcam image
本体传感器基于自身运动信号进行地形分类。2004年,Iagnemma等[30]首次提出基于振动信号的星球车地形分类方法。Sadhukhan等[39]提出在不增加负载的情况下使用IMU进行地形分类,取垂直加速度进行快速傅里叶变换,采用概率神经网络(Probabilistic Neural Network,PNN)进行地面分类。Weiss基于大量试验,针对6种分类器分类效果进行总结,结果如表4所示[40]。其中SVM分类器具有最佳分类效果及在线分类效率,kNN分类器虽然分类时间较长,但在分类精度和训练长时的表现上可圈可点。
有些研究将本体传感器与外部传感器结合应用。Brooks等[41]预先采取离线方法基于振动信号训练SVM识别地形分类。应用时,视觉单元先获取前方地形图像,当星球车行驶至该区域时,本体感知分类器通过振动信号判别地面类型,输出地形标签训练与先前地形图像建立联系,从而训练外部感知地形分类器,通过自我监督学习最终实现根据图像判别地形类别,在未知地形视觉外观的条件下实现地形分类。
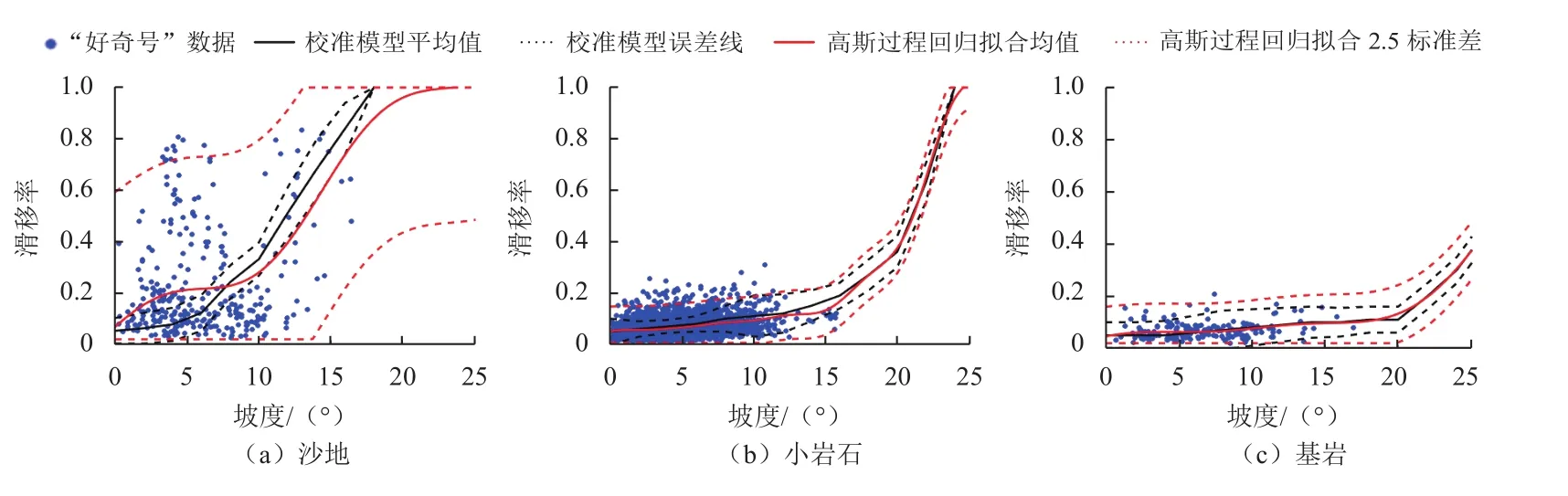
图5 3种地形条件下的滑移-坡度曲线[23]Fig. 5 Slip vs. slope curves for three terrain classes[23]
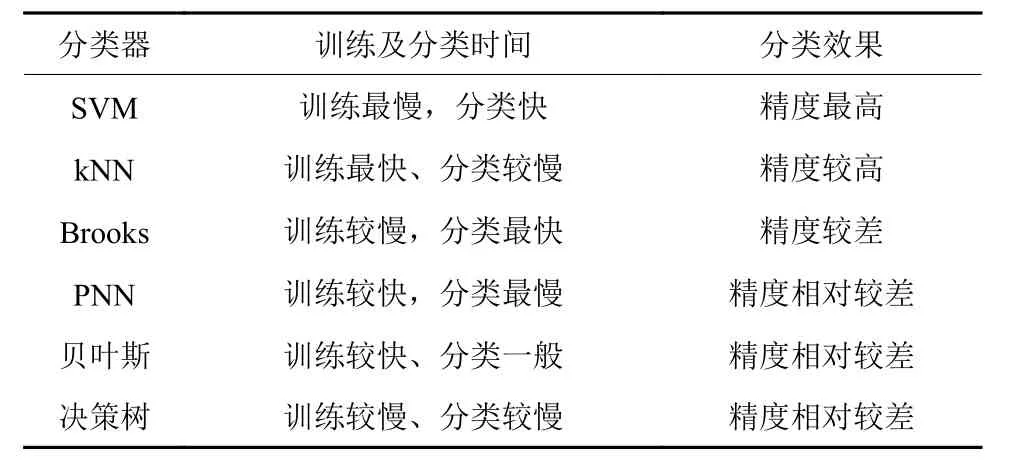
表4 用于地形分类的6类分类器效果对比Table 4 Comparison of the effects of six classifiers for terrain classifications
综上,用于滑移预测的地形分类旨在将地面类型与滑移量或滑移等级建立映射关系。基于外部传感器的地形分类可对前方大范围环境信息进行感知,基于本体传感器的地形感知获取当前环境信息。结合二者优势,通过机器学习算法提升星球车自学习能力,使星球车在未知环境中具备地形识别分类能力,为滑移预测奠定基础。
2 用于非几何障碍识别的启示
随着深空探测任务难度升级,对于全自主、智能化星球车的需求愈发迫切,非几何障碍感知技术关乎星球车巡视安全,是提高星球车自主性能的关键。综合以上分析,总结用于非几何障碍识别的启示如下。
1)优化轮地力学模型
轮地相互作用是产生滑移、沉陷的主导因素,非几何障碍故障的发生与车轮参数和星壤性质直接相关。如图5所示,“好奇号”的SPOC-G滑移预测技术对于沙地的预测性能有待提高,这是由于基于视觉的地形分类并未能细化到星壤参数层面,不同星壤条件下的滑移-坡度样本特点不甚相同,不能在“沙地”分类下一概而论。但经典轮地力学模型求解具有局限性,很难实时识别所有参数。通过优化经典轮地力学模型,针对表征星壤特性的关键参数进行求解,为前方非几何障碍预测及可通过性评估奠定基础。
2)多源信息融合感知障碍
外部传感器以视觉单元为主,通过获取序列图像及前方大范围图像,为障碍监测和障碍预测提供丰富信息。但针对特征稀疏及阴影区域存在误匹配、识别不足等问题,且双目图像处理算法复杂程度高,计算不能满足实时要求。本体传感器感知精度高且克服了环境依赖性,但不具备前方障碍感知预测能力。结合本体与外部传感器,形成由近及远的非几何障碍感知体系,充分发挥各部分优势,扩展感知范围,提升感知效率。
3)应用人工智能技术
面对非结构化、不确定性星球环境,人工智能算法赋予星球车自主学习性能,使星球车在面对潜在危险时能够拓展先验知识从而自主完成巡视任务。基于机器学习分类、回归思想,将滑移数值检测问题转化为滑移水平分类问题,将“测量”转化为“认知”[42],提升了算法的计算效率及泛化能力[43],为传统的非几何障碍感知识别开拓了新思路。同时,迅速发展的深度学习算法能够提取高级抽象特征,为弱特征环境及不确定环境障碍识别感知提供技术支持[44]。
3 基于星壤参数识别的滑移预测方法构想
针对“好奇号”SPOC-G滑移预测技术中对于星壤参数认知不足的问题,综合上文非几何障碍研究的回顾,提出基于星壤参数识别的滑移预测框架,如图6所示。通过地面试验,建立不同地形条件下滑移-坡度曲线模型,由图5可知,松软沙地的滑移实例数据分布杂乱,需要通过星壤参数阈值细化沙地地形分类,建立与坡度、星壤参数相关的滑移模型。运行时,外部以图像为输入,通过立体图像及2D图像获取地形类别及坡度信息,初步筛选滑移预测模型,轮地作用图像为星壤参数识别提供沉陷量参数,本体根据IMU、电机电流信号进行地形分类及有效星壤参数识别,细化筛选预测模型。已知星壤参数、地形、坡度,即可根据地面建立的滑移曲线模型进行非几何障碍预测。
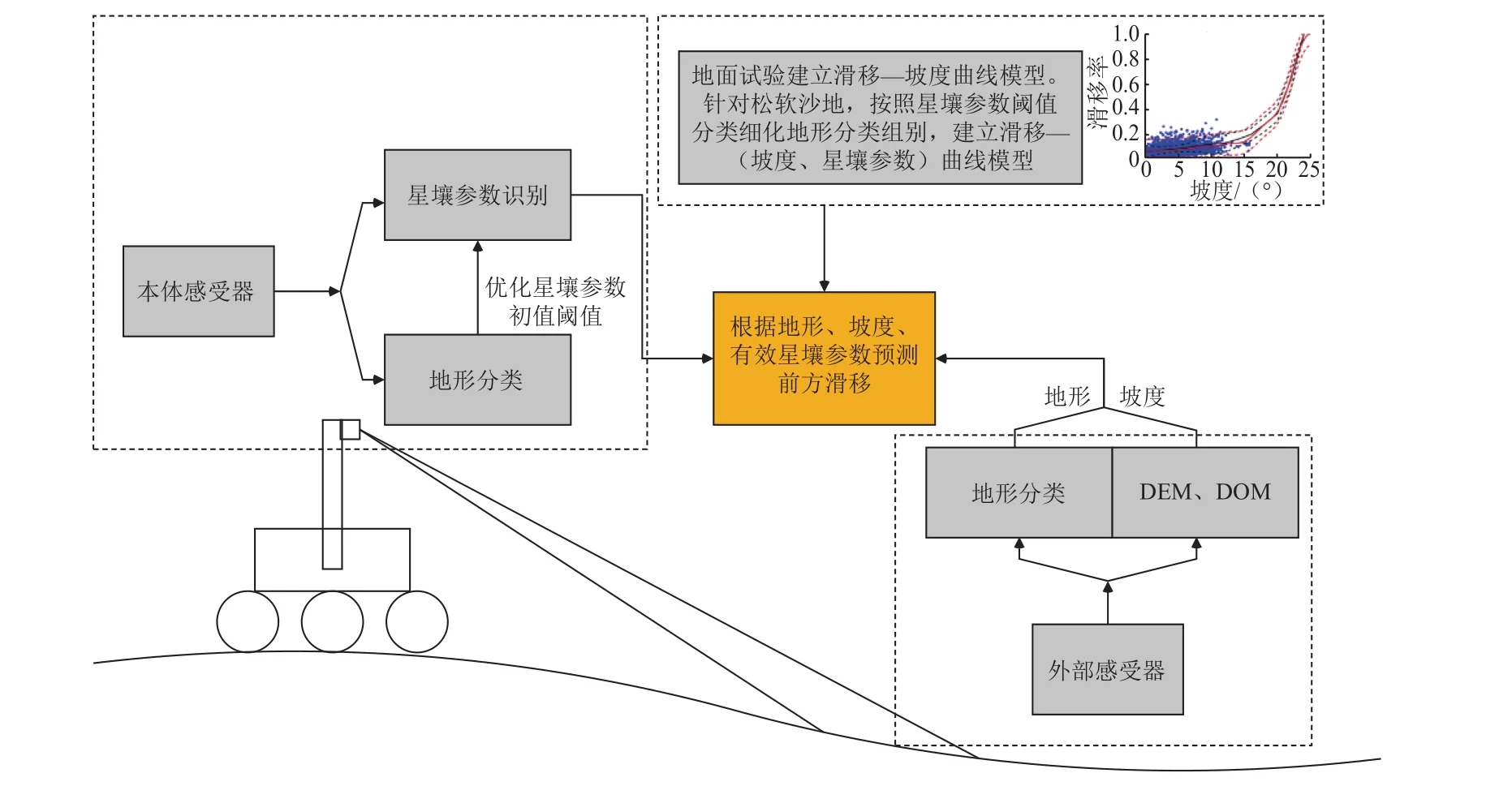
图6 基于星壤参数识别的滑转预测方法构想Fig. 6 Conception of slip prediction framework based on star soil parameter identification
同时,将本体传感器信号、星壤参数、外部图像通过时延组合为同一空间训练样本,基于运行滑移实例不断修正模型,赋予星球车学习能力及推理能力以应对未知环境挑战。
4 结束语
非几何障碍感知是提升星球车自主高效开展巡视探测任务的关键环节之一,可分为障碍监测与障碍预测两方面。未来的非几何障碍研究,一方面需加强星球车自学习能力,提升算法实时性、鲁棒性,解决异步时延数据融合等技术问题;另一方面,需关注轮地力学研究优化模型,为后续星球巡视任务非几何障碍感知研究提供支持。
猜你喜欢
中老年保健(2022年3期)2022-08-24
数学大王·低年级(2021年2期)2021-02-21
趣味(数学)(2020年5期)2020-11-16
汽车观察(2019年2期)2019-03-15
时代英语·高一(2019年1期)2019-03-13
文苑(2018年17期)2018-11-09
小猕猴智力画刊(2018年7期)2018-08-08
漫画月刊·哈版(2017年8期)2018-01-29
发明与创新·中学生(2016年7期)2016-05-14
人生十六七(2015年7期)2015-02-28
