
列车安全防护包络对CBTC列车影响的研究
2021-01-26 08:36石晓雯
铁路通信信号工程技术 2021年1期
石晓雯
(南宁轨道交通集团有限责任公司,南宁 530000)
1 概述
CBTC系统,通过列车自动监控(ATS)系统、列车自动控制(ATC)系统、计算机联锁(CBI)系统等子系统协同工作,实现以移动闭塞为原则,连续车—地双向数据通信的安全可靠的列车自动控制。
其中,列车安全防护包络的计算逻辑是ATC系统的关键技术之一,列车安全防护包络的长度直接影响CBTC列车的安全运行。列车安全防护包络计算需考虑列车所处线路的位置、列车的通信状态、列车实际速度、前方线路状态等实际情况。在地铁运营中,前方进路情况、列车状态等运行场景复杂多变,列车安全防护包络长度实时变化。当列车安全防护包络性质发生变化时,对车-车之间的安全防护、列车运行控制、后续CBTC列车正常运营造成影响。由此本文从列车安全防护包络的计算原理、控制逻辑、现场实际情况等角度剖析并为故障下的运营管理提供相关措施。
2 列车安全防护原理
列车运行过程中,车载计算机(简称CC)通过轨旁信标计算列车准确定位,依靠编码里程计完成两个定位信标之间列车位移计算。由于列车定位是一个运动状态,在运行过程中编码里程计测速、系统运算均存在一定的误差,导致列车运动过程中产生定位误差。为充分考虑误差带来的影响,CC计算的列车位置以可能的安全范围代替一个确定的位置,以增加系统的安全性能。
如图1所示,假设沿着列运行方向线路公里标逐渐增大,“车头位置”、“车尾位置”为CC通过信标、编码里程计计算的,不考虑任何误差的列车位置,分别记做H、L;“预估距离”为CC考虑设备计算误差、测距误差、速度、列车前后方不确定性等安全因素而计算的列车可能走过的距离,记做D;“最小车头/尾位置”、“最大车头/尾位置”是CC根据车头/尾位置、预估距离计算的列车可能的最大车头/车尾位置,即:
最小车头/尾位置=H(L)-D;
最大车头/尾位置=H(L)+D;
列车长度=H-L。

图1 列车定位原理Fig.1 The principle of train positioning
因此,最小车尾位置、最大车头位置之间的范围则为列车有可能的位置,在此区域内列车处于安全范围。
如图2所示,区域控制器(简称ZC)周期性收到包含CC计算的列车最小车尾位置、最大车头位置、列车速度等信息的列车位置报告后,完成ZC识别管辖区域内所有列车识别,分辨CBTC列车与非CBTC列车,并为每列车计算生成安全防护包络(在ATC系统内识别每列车的长度为列车安全防护包络的长度),根据ZC区域内的列车位置情况及进路情况,为每列车授权可运行终点,实现移动闭塞。

图2 列车防护包络产生逻辑Fig.2 Generation logic for train protection envelope
3 列车安全防护影响机制
对于车地通信正常的列车,ZC周期根据列车的位置报告更新列车安全防护的终点,但对于非受控列车即车地通信异常或非CBTC列车,ZC无法获取列车的位置报告,导致ZC无法识别列车的真实位置。为保护其他CBTC列车的安全运行,此时ZC会根据联锁发送的区段占用状态等线路条件计算,在其周围(以计轴为界)延长列车防护包络,形成一定距离(约480 m)的安全防护区域(简称“Buff er”区域),如图 3所示。

图3 非受控列车防护包络示意图Fig.3 Schematic diagram of uncontrolled train protection envelope
ATC系统应保证后续CBTC列车不侵入该安全保护区域或在此安全防护区域的CBTC列车应施加紧急防护措施,以保证列车安全可控。当列车由CBTC列车变为非受控列车时,安全防护区域延长,后续CBTC列车的授权终点在Buffer区域之外,同时在Buffer区域内的CBTC列车触发紧急制动,列车无法继续以CBTC模式运行。
Buffer区域的延长距离以计轴点为界,向两边延伸。当延伸至的下个计轴区段的长度超过480 m,则Buffer区域长度延长至下个计轴区段的计轴点;若下个计轴区段的长度小于480 m,则Buffer区域将继续往下一个计轴区段延伸,直至距离达到480 m,并以该计轴区段的计轴点为终点。
除上述规律外,Buffer区域的延长距离还受道岔位置影响,如图4所示,假设G1区段的长度超过480 m,G3区段出现粉红光带,当道岔处于定位时,G3区段粉红光带的影响范围一直至G1区段的计轴点AC1。
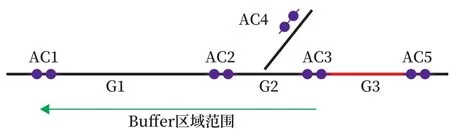
图4 当道岔处于定位时的Buffer影响范围Fig.4 Buffer influence range when turnout is in normal position
当道岔处于反位时,如图5所示,则G3区段粉红光带的影响范围仅至G1区段的计轴点AC2。需要说明的是,在此情况下,若G1为站台区域,G2为进站进路的延续防护区段,则CBTC列车无法正常进站对标。
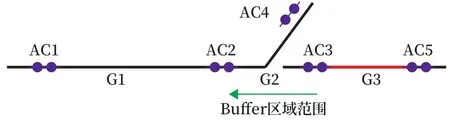
图5 当道岔处于反位时的Buffer影响范围Fig.5 Buffer influence range when turnout is in reverse position
4 实际情况
结合南宁地铁2号线运行情况,列车实际控制情况与理论研究相符。
案例一:当道岔位置处于定位,前方出现非通信列车时后续CBTC列车的运行情况。
如图6所示,P0101、P0104/P0105道岔均处于定位时,非通信列车A车占用G6区段,G6区段粉红光带,在A车两侧存在安全防护区域,其影响距离为480 m并以区段计轴点为界,即图6中G3区段至G5区段为Buffer区段(AC3至AC6长度约为500 m),后方CBTC列车B车停在G2区段,前方移动授权距离为0 m,列车无速度码,无法以CBTC模式运行。
如图7可知,当G6区段由红光带变为非通信车占用的粉红光带时,随着B车往前运行,运行至S0102信号机前时接收到ZC发送的前方可授权运行的距离变为0 m,列车目标速度即列车速度码为0 km/h,在B车无可运行距离授权、无速度码情况下,B车以CBTC-ATPM模式无法动车,当前速度变为0 km/h。当A车由非通信列车恢复为通信列车后,安全防护包络距离缩短,A车收到前方运行授权并恢复速度码。

图6 道岔处于定位时的Buffer实际影响情况Fig.6 The actual impact of Buffer when turnout is in normal position
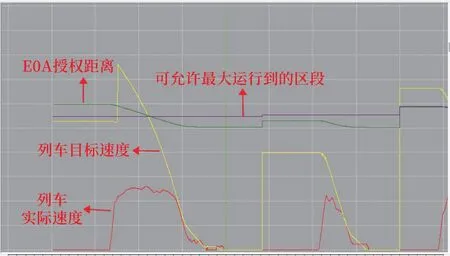
图7 案例一B车数据情况Fig.7 Data of train B for Case 1
案例二:当道岔位置处于定位,前方出现非通信列车时后续CBTC列车的运行情况。
如图8所示,P0101道岔处于反位时,非通信列车A车占用G6区段,G6区段粉红光带,在A车两侧存在安全防护区域,其影响距离仅到AC5,即图8中G5区段为Buffer区段(AC5至AC6长度小于480 m),后方CBTC列车B车停在B站站台,列车无速度码,无法以CBTC模式运行。

图8 道岔处于定位时的Buffer实际影响情况Fig.8 Actual impact of Buffer when turnout is in reverse position
如图9分析可知,当G6区段由红光带变为非通信车占用的粉红光带时,随着B车往前运行,运行至B站站台时接收到ZC发送的前方可授权运行的距离变为0 m,列车目标速度即列车速度码为0 km/h,在B车无可运行距离授权、无速度码情况下,B车以CBTC-ATPM模式无法动车,当前速度变为0 km/h,最终停在B站站台区域但无法对标停车,距离站台停车点约7.5 m。当A车由非通信列车恢复为通信列车后,安全防护包络距离缩短,A车收到前方运行授权并恢复速度码。

图9 案例二B车数据情况Fig.9 Data of train B for Case 2
5 优化建议
由于此功能为保证列车安全、信号系统安全可靠而设计,但实际运营过程中出现此类场景,若处理不当时则会对运营造成较大影响。因此,在满足信号安全的前提下,为提高地铁的运行效率,提出以下故障管理控制措施。
当线路中某个区段出现粉红光带时(非CBTC列车占用),该区段前后480 m会产生安全防护区域,若480 m达到了区段内部,则扩展到整个区段,建议后续CBTC列车以后备模式运行,若在Buffer区域内的列车,切换至后备模式运行。
若粉红光带区段出现在站台后方,CBTC列车可以ATO/ATPM模式进站在距离停车点约7~8 m处自动落码停车,后续将列车驾驶模式转为RM模式进站对标。
通过以上两点措施,在保证安全运行的前提下可提高故障下的地铁运营效率。
6 结语
当线路上出现非通信列车或计轴干扰导致粉红光带时,若处理不当会对地铁运营产生较大影响。因此理解地铁信号系统中Buffer区域的产生逻辑、影响范围及对CBTC列车影响,有利于日常运营故障处理,同时针对影响提供了两点运营管理建议,可有效降低由于安全防护对轨道交通产生的影响,提高轨道交通运营效率。
猜你喜欢
都市快轨交通(2022年2期)2022-06-28
科技视界(2022年10期)2022-05-20
华东交通大学学报(2022年1期)2022-04-06
云南画报(2021年11期)2022-01-18
文萃报·周五版(2021年11期)2021-06-23
铁道运营技术(2021年2期)2021-04-01
装备维修技术(2020年33期)2020-08-10
科技视界(2020年8期)2020-05-18
军事文摘(2020年24期)2020-02-06
青年文摘·上半月(1994年6期)1994-01-01
