
重载铁路移动闭塞计算机联锁系统研究
2021-01-26 08:36张利峰王春华
铁路通信信号工程技术 2021年1期
张利峰,王春华
(1.北京全路通信信号研究设计院集团有限公司,北京 100070;2.北京市高速铁路运行控制系统工程技术研究中心,北京 100070)
1 概述
与公路运输、航空运输相比,铁路运输有着运量大,成本低,能耗低的特点。高速、重载是铁路发展的两个方向,其中重载铁路运输因具有运能大、效率高、运输成本低等优势而受到世界各国的广泛重视,是世界上大宗货物最经济有效的运输方式,随着经济社会快速发展,国内、国际上对于重载货运铁路系统的运输能力提出了更高要求。
朔黄铁路全长600多km,上游连接神朔铁路、准池铁路,下游连接黄骅港,是国内西煤东运的重要通道。目前朔黄铁路信号系统采用三显示自动闭塞信号系统,车地通过轨道电路来实现车地单方向通信,司机在机车信号、 LKJ 设备的辅助下人工驾驶列车运行。现有三显示自动闭塞信号系统只能满足10 min左右的追踪间隔,无法满足年运量快速增长的要求,急需缩短追踪间隔以进一步提升运输能力。基于无线通信的移动闭塞是解决目前重载列车安全运输问题和提高效率的有效手段,相比于三显示固定闭塞的行车方式,移动闭塞可有效保证列车运行安全,能显著缩短行车间隔和发车间隔,在保证重载运行安全性与可靠性的基础上,大幅提升线路运能。
2 朔黄重载铁路移动闭塞技术方案
朔黄重载铁路采用基于通信的移动闭塞技术方案。重载列车车载设备通过速度传感器和雷达主动计算位置,通过应答器信息对列车位置进行校准,计算得到列车的位置信息并通过TD-LTE 无线通信系统发送到地面RBC设备,同时接收RBC下达的行车许可数据来计算制动曲线,将控车命令通过列车接口单元传递给机车制动系统,来实施常用制动或紧急制动。地面RBC设备根据接收到的列车位置信息和计算机联锁设备发送的进路信息,为列车计算行车许可,并通过地面LTE无线通信单元将行车许可发送到车载设备。CTC子系统根据时刻表,向联锁子系统下达进路办理命令。
根据朔黄铁路移动闭塞系统总体技术方案,既有朔黄铁路计算机联锁需要进行升级改造满足移动闭塞的功能需求。
3 计算机联锁系统结构
朔黄铁路肃宁北站、太师庄站、黄骅南站计算机联锁设备(CBI)采用DS6-K5B型计算机联锁,系统核心部件采用“二乘二取二”架构设计,系统结构包括:联锁逻辑部子系统,该部分是承担联锁运算的核心部件;I/O子系统,该部分负责信号继电器的采集和驱动;MMI子系统,该部分负责人机会话;电务维修机子系统,该部分实现系统维护、故障查找和记录等功能。DS6-K5B型计算机系统I/O子系统通过继电器控制轨旁的信号机、道岔等信号设备动作;联锁逻辑部子系统通过以太网通信接口与无线闭塞中心(RBC)接口;MMI子系统通过串行通信接口与调度集中系统(CTC)接口;电务维修机子系统通过串行接口与集中监测系统(CSM)接口。DS6-K5B计算机联锁系统的结构如图1所示。
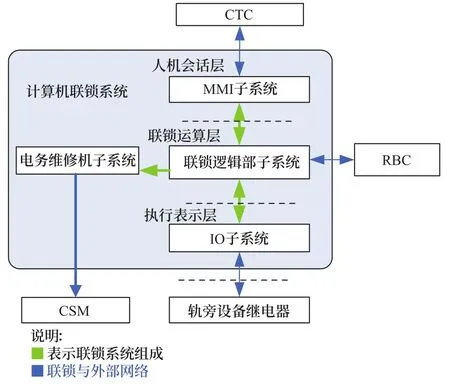
图1 DS6-K5B型计算机联锁系统结构Fig.1 DS6-K5B computer based interlocking system structure
4 关键技术方案
4.1 移动闭塞多列车进路办理与解锁
为减小运行间隔,提高车流密度,在移动闭塞控制系统中,联锁设备根据列车属性来决定为列车办理单列车进路或多列车进路。移动闭塞控制系统中,线路中运行的列车属性分为具备移动闭塞通信功能的列车(CT)和不具备移动闭塞通信功能的列车(UT)。单列车进路的办理方式和使用方式与既有固定闭塞系统一致,在办理多列车进路后,一条进路中允许有多列车运行,列车运行及追踪安全由RBC设备进行防护。多列车进路的正常解锁需按照进路内的最后一列CT列车的轨道区段占用/出清顺序来执行解锁。移动闭塞多列车进路解锁场景如图2所示。
场景一:前车发车进路办理后,信号开发,前车准备驶入岔区。场景二:前车驶离冲突道岔后,道岔自动解锁,联锁具备为后车办理多列车进路条件。场景三:联锁为后车的移动闭塞列车办理多列车进路,一个进路内允许多列车运行。场景四:前车出清进路内的轨道区段时,区段维持锁闭状态。场景五:多列车进路内的最后一列车出清进路内的轨道区段时,区段按出清顺序执行解锁。

图2 移动闭塞多列车进路解锁场景图Fig.2 Unlocking diagram of multi-train route in moving block system
4.2 信号机控制
4.2.1 信号机亮灭灯控制
1)列车信号机亮灭灯控制流程
为减少地面信号对移动闭塞中CT列车司机的影响,联锁需对区间和站内的列车信号机(含列车兼调车信号机)进行亮灭灯控制,控制原则如下:
RBC会沿着CT车的行车许可方向来寻找下一架列车信号机,若列车车头距该架信号机的距离小于灭灯距离(Lm)且RBC计算的行车许可终点已到达或越过该信号机,则RBC向联锁发送该架信号机的“CT接近”信息;
联锁收到RBC发送的“CT接近”信息后,对相关列车信号机(含列车兼调车信号机)执行灭灯操作;
当CT车车头通过信号机时,RBC将发送的“CT接近”信息变更为“无CT接近”,联锁在收到“无CT接近”信息后将该架信号机恢复为亮灯状态。
2)列车信号机的亮灭灯控制过程场景
场景一:UT列车追踪CT列车,具体情形如图3所示。
UT列车按照三显示固定闭塞方式运行,UT车前的信号机始终保持常亮状态。CT车在尚未到达进路前方信号机的灭灯区段时,信号机保持亮灯状态。
CT车在到达进路前方信号机的灭灯区段时,信号机由亮灯状态转为灭灯状态。
CT车车头越过信号机后,RBC将发送给CBI的“CT接近”转变为“无CT车接近”,CBI将该架信号机恢复为亮灯状态。UT车前方信号机始终保持常亮状态,UT车需根据信号行车。
CT车继续接近向前行驶,CBI依据RBC发送的信号机的“CT接近”信息和“无CT车接近”信息对信号机执行亮灭灯控制。
场景二:UT列车追踪UT列车,具体情形如图4所示。

图3 列车信号机亮灭灯控制过程场景一Fig.3 Scenario 1 of the control process of signal lighting on and off
信号机常亮,司机按照既有地面信号行车。
场景三:CT列车追踪UT列车,具体情形如图4所示。
重载移动闭塞系统下,CT车需间隔一定的安全距离来追踪UT车。CT车的行车许可由RBC发送,追踪UT车的方式由RBC来实现。UT车按照既有固定闭塞方式运行,UT车前方信号机始终保持常亮模式。CBI对CT车前方的列车信号机亮灭灯控制过程与本节中的“场景一”相同。
场景四:CT列车追踪CT列车,具体情形如图4所示。
CT车追踪CT车时,两车可以运行至同一区段内。CBI对CT车前方的列车信号机亮灭灯控制过程与本节中的“场景一”相同。
场景五:CT列车异常降级,具体情形如图5所示。
CT车追踪UT车时,当后车CT车发生降级变为UT车时,RBC给CBI发送的“CT接近”信息转变为“无CT接近”,信号机将恢复亮灯状态。
CT追踪CT车运行时,两车均在信号机的点灭灯区段内,当前车CT车发生降级变为UT车后,由RBC向联锁发送该信号机无CT车接近,联锁控制信号机为亮灯状态;当后车CT车发生降级变为UT车后,由RBC向联锁发送该信号机为CT车接近,联锁控制信号机保持灭灯状态。
4.2.2 信号关闭
移动闭塞系统下,单列车进路的信号正常关闭原则沿用既有原则,单列车进路和多列车进路的信号异常关闭原则沿用既有原则,多列车进路的信号正常关闭流程需按如下步骤进行:
多列车进路的始端信号机开放后,CT车接近该信号机,RBC向CBI发送“CT接近”信息,CBI将该信号机控制为开放且灭灯状态;
RBC判断列车车头已越过信号机后,向CBI同时发送“无车接近”和“信号机跨压”信息,CBI在收到“无车接近”信息后将信号机恢复为亮灯状态;

图4 列车信号机亮灭灯控制过程场景二、三、四Fig.4 Scenario 2, 3 and 4 of the control process of signal lighting on and off

图5 列车信号机亮灭灯控制过程场景五Fig.5 Scenario 5 of the control process of signal lighting on and off
CBI收到“信号机跨压”信息后将信号机置于关闭状态。多列车进路的信号机关闭场景如图6所示。

图6 多列车进路的信号机关闭场景Fig.6 Signal lighting off scenario of multi-train route
由于车载ATP设备存在定位误差,RBC可能在列车车头未越过信号机前就向CBI汇报多列车进路内方第一区段被CT车占用,同时,RBC设备需确保列车首轮对通过信号机后才会向CBI发送“无CT接近”和“信号机跨压”。因此,当CBI检测到多列车进路内方第一区段被占用但没有收到RBC发送的“信号机跨压”时,联锁不关闭本架信号机,避免出现司机看到红灯的情况。
4.3 区段融合处理
移动闭塞系统下,联锁可以通过继电器获取区段占用/空闲信息,还可以从RBC获取逻辑区段占用/空闲信息,联锁设备将两路信息融合后进行逻辑运算和站场状态显示。朔黄线全线铺设轨道电路,而轨道电路存在“分路不良”特性,信号设备不能有效的检测该故障。针对移动闭塞模式的列车,联锁需要结合RBC发送的逻辑区段状态信息(占用/空闲)联锁采集的轨道区段占用状态(GJ吸起或者落下),采用“或占用”、“RBC占用优先”的原则进行融合处理,并将融合后的状态应用在联锁逻辑处理中。朔黄铁路站内的逻辑区段按照物理区段进行划分,对于站内的逻辑区段,采用“或占用”逻辑进行融合处理。区段的“或占用”融合处理逻辑如表1所示。

表1 区段“或占用”融合逻辑Tab.1 "Or occupation" fusion logic of track section
区间的一个物理区段可能被分为多个逻辑区段,对于区间的物理区段,联锁采用“RBC占用优先”的原则进行占用状态处理。如图7所示,1G 为区间的一个物理区段, 1A、1B、1C为1G包含的3个逻辑区段。当1G处于空闲态,有CT车压入逻辑区段1A 时,联锁会采集到1G占用,RBC 会汇报1A 是 CT占用,1B和1C处于空闲状态。为避免联锁按照“或占用”融合出 1A 是CT占用、1B和1C是 UT 占用的情况,联锁需采用“RBC占用优先”的原则,将 1A 置为CT占用,将1B和1C置为空闲态。

图7 “RBC占用优先”原则Fig.7 "RBC occupancy first" principle
4.4 计算机联锁系统接口
4.4.1 移动闭塞接口交互数据
移动闭塞系统下,计算机联锁设备与CTC、RBC使用通信接口进行数据交互。交互流程如下:
CTC依据计划和列车位置向联锁下发进路办理命令;
联锁将采集的区段占用/空闲状态和RBC根据列车位置发送的逻辑区段状态进行融合处理;
联锁使用融合后的区段状态进行联锁运算,判断进路是否可以办理成功;
联锁设备周期将处理后的结果以码位的形式发送给CTC;
调度人员依据站场状态判断是否需要人工干预(例如,执行信号重开等操作)。
移动闭塞系统接口交互数据流如图8所示。
4.4.2 CBI与RBC接口
RBC与CBI同时接入信号安全数据网(新设),一个RBC可以管理多个CBI,CBI与RBC在安全通信协议的基础上进行周期通信并交互数据;RBC向CBI发送通信列车接近信息、通信车跨压信号机信息、逻辑区段状态信息;CBI向RBC发送信号机状态信息、物理区段状态信息、道岔状态信息、进路状态信息。

图8 移动闭塞系统接口交互数据示意图Fig.8 Schematic diagram of interface data interaction in moving block system
4.4.3 CBI与CTC接口
CBI从CTC接收进路控制命令信息,并向CTC发送站场状态信息。CBI与CTC维持既有的物理接口方式。CBI将逻辑区段状态发送给CTC,用于细化显示移动闭塞列车位置。
4.4.4 CBI与CSM接口
CBI将站场设备状态信息发送给CSM设备。CBI与CSM维持既有的物理接口方式。CBI将增加的逻辑区段、信号机亮灭灯等状态信息发送给CSM设备。
5 结束语
本文所述重载铁路移动闭塞计算机联锁升级方案是基于既有线信号系统进行升级改造实现了移动闭塞功能,对既有运营影响最小。同时兼容既有固定闭塞的功能,在全线移动闭塞改造完成后,在保证系统安全的前提下,将显著提高货运列车追踪密度和朔黄铁路的运输能力。目前中国国家铁路集团有限公司正在组织相关单位对高速铁路移动闭塞方案进行研究和试验,朔黄重载铁路移动闭塞技术方案对高速铁路移动闭塞方案的研究具有一定借鉴意义。
猜你喜欢
华东交通大学学报(2022年1期)2022-04-06
云南画报(2021年11期)2022-01-18
铁道运营技术(2021年3期)2021-07-28
装备维修技术(2020年33期)2020-08-10
科技视界(2020年8期)2020-05-18
中国房地产业·中旬(2019年4期)2019-10-21
科学导报·科学工程与电力(2019年5期)2019-10-20
科学导报·科学工程与电力(2019年42期)2019-09-10
智富时代(2018年6期)2018-08-06
智富时代(2018年6期)2018-08-06
