
基于EMD-SDP特征融合的CNN轴承保持架故障诊断研究*
2021-01-22 03:00郑一珍牛蔺楷熊晓燕祁宏伟谢宏浩
机电工程 2021年1期
郑一珍,牛蔺楷,2,熊晓燕,2*,祁宏伟,谢宏浩
(1.太原理工大学 机械与运载工程学院,山西 太原 030024; 2.太原理工大学 新型传感器与智能控制教育部重点实验室,山西 太原 030024)
0 引 言
轴承作为机械基础件,广泛应用于高端装备、智能设备和其他关键领域[1]。随着制造设备向着规模化、高速化、集成化和智能化方向发展[2],滚动轴承的工作环境越来越具有挑战性。保持架作为滚动轴承重要的组成部分,一旦出现故障,其他部件也会发生故障。在轴承工作过程中,伴随保持架早期故障的逐渐发展,会导致轴承整体出现故障而失效,从而影响到装备整体运行。为了保持设备的安全稳定运行,必须实时监测轴承保持架的运行状况。
轴承保持架的早期故障难以直接观察,保持架故障振动信号存在无冲击特性、非平稳性、冲击脉冲的间隔,具有随机性且周期较长、冲击脉冲能量不均匀,及故障特征难以提取的问题。因此,针对当前研究中常用的振动信号分析方法,通过分析故障振动特性,提取保持架信号时频特征的方法,难以判别保持架故障形式及其损伤程度。有学者研究了智能故障诊断算法在保持架故障诊断中的应用。汤芳等[3]通过小波包分解保持架故障信号得到了小波包系数,并求解了小波包系数熵,然后将熵值作为提取特征指标输入支持向量机(SVM),以识别故障损伤程度。但是,传统故障诊断技术的科学性、实用性和通用性还不够;特征提取主要依赖于经验和专家知识,对操作者有较高的技术要求,并且难以实施。
EMD作为一种自适应信号分解方法,可以准确有效地把握原始数据特征信息。其他的一些振动信号可视化方法,例如轴心轨迹[4]和SDP分析,由于其独特的显示特性而被广泛用于非线性和非平稳信号的特征提取。例如,XU X等[5]提出了一种基于SDP和图像匹配的实时离心风机失速检测方法。
在故障诊断领域中,卷积神经网络作为深度学习领域的一个主要构成部分[6],也出现了一些关于CNN的研究。CHEN Z Q等[7]提出了将齿轮箱故障振动信号的时频特征输入二维CNN网络,得到了基于卷积神经网络的齿轮故障诊断算法模型,实现了齿轮箱的故障类型识别。CNN模型可以自适应提取输入图像之间的差异特征,进一步提高故障的诊断精度。
因此,为解决传统特征提取和信号处理方法中存在的问题,本研究提出基于EMD与SDP特征信息融合的CNN故障诊断方法。
1 EMD-SDP特征融合的CNN故障诊断模型
故障振动信号特性差异可以通过振动信号的时频图像来表示,基于SDP方法的信息融合特性,对EMD分解模态分量进行特征融合,可以充分展示信号的整体特性。
本文基于EMD-SDP特征融合的CNN故障诊断模型流程如图1所示。
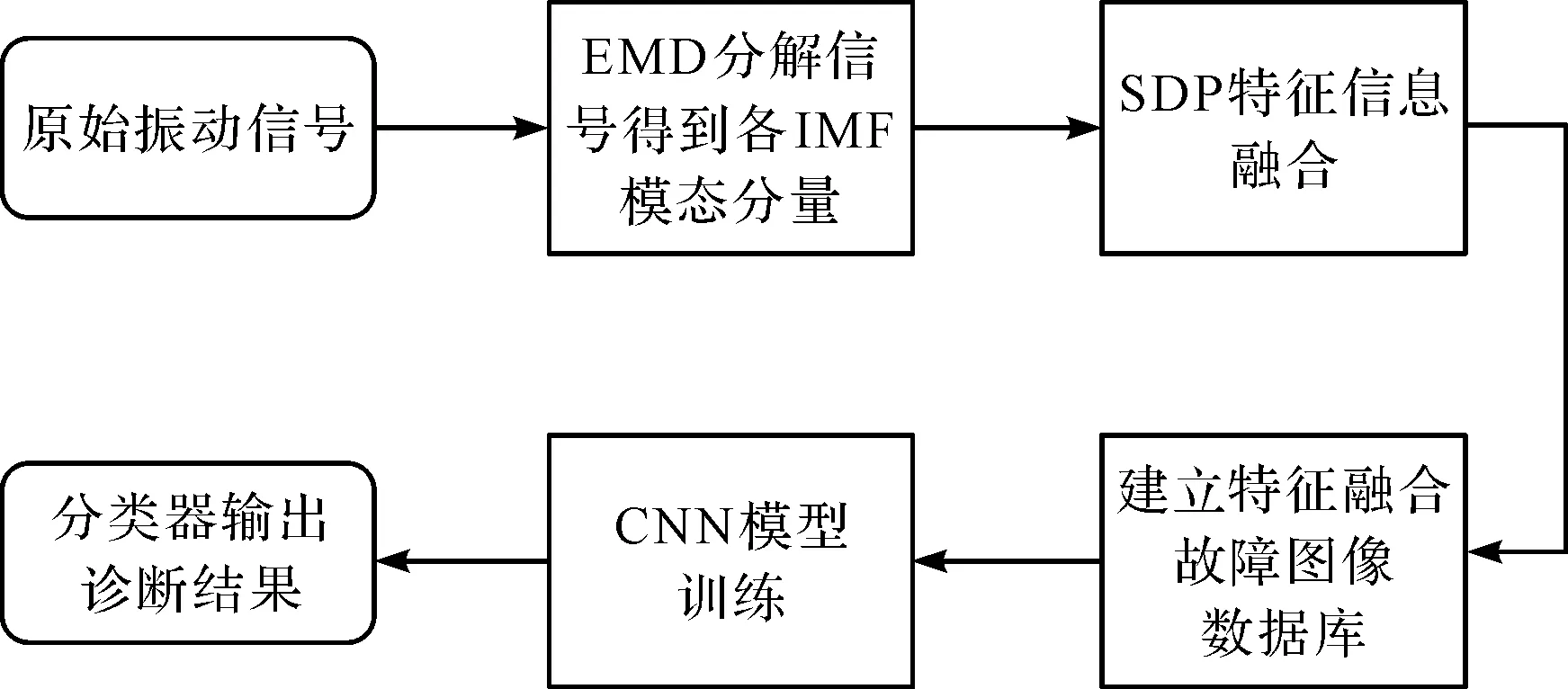
图1 基于EMD-SDP特征融合的CNN故障诊断模型流程图
研究过程主要按照以下步骤进行:
(1)通过EMD分解对端点数据延长的原始振动信号进行平稳化处理,从而自适应提取得到不同时间尺度的局部特征信号;
(2)利用SDP分析方法进行模态分量的特征信息融合,以获得振动信号下的SDP特征图像;
(3)将SDP图像作为卷积神经网络模型的输入以实现数据驱动下的特征学习,最终实现振动信号自适应特征提取与故障类型的分类识别。
1.1 EMD分解
通常,利用EMD分解振动信号得到模态分量函数,必须满足以下两个条件[8]:
(1)在数据信号分解IMF的过程中,要求具有相同的极点数和零点数或者相差最多一个;
(2)数据信号极值确定的两条包络线均值为零,即曲线关于时间轴局部对称。
此处,EMD模态分量分解步骤为:
(1)标定信号的所有局部极值点,并用3次样条曲线连接形成信号数据的包络线;
(2)计算包络线的均值,并求出其与原始信号的差值信号,即:
y1(t)=x(t)-μ1
(1)
式中:x(t)—原始信号;μ1—包络线的均值;y1(t)—差值信号。
(3)判别y1(t)能否满足模态分量条件,若其不是1个模态分量函数,则将y1(t)作为待处理数据,继续以上步骤(1)、(2),直到y1(t)满足模态分量函数条件;然后,记y1(t)=c1(t),得到信号x(t)的第一个模态分量c1(t),它包括信号x(t)中最高频率的波动成分;
(4)将模态分量从原始信号中分离出来,即:
r1(t)=x(t)-c1(t)
(2)
式中:x(t)—原始信号;c1(t)—一阶模态分量;r1(t)—差值信号。
(5)将差值信号继续作为原始信号,重复上述步骤,顺次获得其他的n个模态分量,即:
(3)
式中:ci(t)—各阶模态分量;ri(t)—各阶差值信号。
当模态分量cn(t)达到一定阈值,或余项rn(t)成为单调函数时,终止循环过程。
将式(2,3)相加可得:
(4)
式中:rn(t)—信号平均趋势的余项函数;ci(t)—信号频带中从高到低的信号分量。
一般地,通过EMD分解得到的前几个分量通常包含有原始信号中最重要的特征信息[9]。同时,考虑到在EMD分解中,通过对原始信号极值点分别进行样条插值拟合得到包络曲线时存在的端点效应,可能导致信号发散,从而影响到分解精度。因此,笔者采用延长信号采样时间,使端点数据延长的方法[10],来抑制EMD分解时的端点效应。
具体的做法是:在提取故障振动信号数据时,在左右两端各截取一个信号周期长度的数据信号,然后提取剩余数据长度的IMF分量,作为最终分解结果;最终通过EMD方法将信号有效分解为几个模态分量的总和,并使得端点数据截取后信号分解结果接近理想的分解结果,从而在不同的分辨率下显示出信号特征。
1.2 基于EMD的SDP特征融合
1.2.1 SDP分析
作为一种新的信号处理方法,SDP分析可以通过图像来反映不同故障时序信号幅值和频率的状态变化[11,12]。该方法通过将归一化后的时域波形映射到极坐标上,以生成对称点图样,即将时域振动信号X={x1,x2,…xi,…xn}转换为极坐标空间中的点S[r(i),θ(i),φ(i)]。
SDP算法分析原理如图2所示。

图2 SDP算法分析原理 r(i)—半径分量;θ(i)—镜像对称平面的逆时针转角;φ(i)—镜像对称平面的顺时针转角
图2中,在极坐标平面内,时域波形的1个点映射到1个径向分量,相邻点则映射到1个角度分量。
具体计算公式如下:
(5)
(6)
(7)

笔者通过SDP分析方法,将时域波形转换成极坐标图像,呈现故障振动信号特性。在生成的SDP图像上,不同类型的故障振动信号特性主要体现为[13]:
(1)SDP镜像图形的曲率;
(2)SDP镜像图形的厚度和形状特征;
(3)SDP镜像图形的几何中心;
(4)SDP镜像图形的集中区域。
考虑到SDP图像的每个镜像平面都能够表示一组数据特征,因此,本文将原始振动信号EMD分解得到的前6个模态分量函数,在同一极坐标下通过SDP图像表示出来,最终通过各模态分量信息特征融合,实现更充分的原始振动信号特性表达。
1.2.2 SDP参数化
在SDP分析方法中,需要对角度参数θ、时间滞后系数l和放大系数ξ的参数值进行选择。考虑到本文融合了前6个模态分量信号,所以笔者选择的θ值为360°/6=60°,这样得到的SDP图形样式为六重对称的雪花状。由式(5~7)可知,在SDP图形中,信号的频率成分由图形点阵的曲率表示,信号变化往往会导致点阵模糊,从而增加SDP占用空间。因此,通过合理选择l和ξ的参数值可以提高SDP图形的分辨能力,进一步放大不同故障信号间的差异。
KATSUHIKO S等[14]的研究结果表明,合适的l和ξ参数值选择主要取决于研究对象;同时,实验对比时间滞后系数l和放大系数ξ不同参数值时故障振动信号的SDP图像结果也表明,在参数设置为l=10和ξ=20°时,图形可以最有效地区分裂纹和断裂故障振动信号。
因此,此处笔者按照l=10和ξ=20°进行参数设定。
1.3 基于CNN的故障诊断模型
CNN网络模型中,通过设置多级特征滤波器对输入图像执行反复卷积与池化运算处理,最终达到数据特征自动提取和降维的目的,同时得到具有旋转和平移不变性的数据特征[15];并且CNN具有的表征学习能力,随网络层数加深不断增强,使网络训练可以得到更好的鲁棒特征。
CNN模型结构如图3所示。
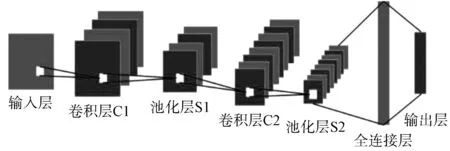
图3 CNN模型结构图
1.3.1 卷积层
卷积层通过卷积核权重共享来提取局部区域的数据特征,不仅可以降低网络模型的复杂度,而且可以显著提高网络的学习效率。
卷积运算过程如下所示:
(8)
1.3.2 池化层
同时在CNN网络结构中,还需要添加池化层以减小特征空间大小,减少网络参数数量。实际中最常见的池化方式是最大池化,通过对特征矩阵执行提取局部极值操作,可以在减少参数的同时获得具有位移不变性的特征。
池化运算过程如下所示:
(9)

1.3.3 全连接层
为了进行故障类型识别输出,模型添加了与故障类别数量相同的神经元作为全连接输出层;输出层以之前各层的级联特征图像作为输入。
输出公式如下:
O=f(bo+ωofv)
(10)
式中:bo—偏差向量;ωo—权值矩阵;fv—特征向量。
1.3.4 模型训练
在模型训练过程中,CNN利用反向传播算法,通过训练样本的输出标记来调整网络参数。CNN的主要超参数包括卷积核大小k,权重系数β、ω以及各层的偏差b。
因此,笔者通过计算实际输出和理想输出之间的差值进行模型参数调整,使得实际输出更加接近理想输出;最终得到适用于故障分类任务的模型。
损失函数计算公式如下:
(11)
式中:Opj—实际故障类型输出;Ypj—理想故障类型输出;Ep—损失函数差值。
2 实验研究
2.1 实验数据说明
为充分训练CNN模型,笔者准备了大量的训练样本以验证算法的有效性。考虑到常见的轴承保持架故障形式有裂纹、断裂、塑性变形和磨损,且一般以载荷不大的高频瞬时碰撞产生的裂纹和断裂故障为主,故本研究以圆柱滚子轴承保持架裂纹和断裂故障为例。
实验用轴承为NSK公司生产型号为NF204EM的圆柱滚子轴承,采用规格0.18 mm的钼丝,使用线切割加工技术在保持架上加工出裂纹和断裂缺陷。其中,裂纹故障深度尺寸分别为0.5 mm、1.0 mm、1.5 mm、2.0 mm、2.5 mm,断裂故障尺寸为3.25 mm。因此,再加上保持架正常状况的轴承,实验共含有7种不同保持架故障状况的轴承。
采集实验原始数据的轴承保持架故障试验台如图4所示。

图4 轴承保持架故障试验台
实验时,在远离电机一侧的试验台轴承座上安装不同故障程度的保持架裂纹和断裂故障轴承,然后在1 800 r/min转速下,使用加速度传感器以5 kHz的采样频率采集轴承座处的故障信号。
实验中,每种类型的保持架故障都包含500个数据样本,每个样本包含2 500个数据点,并对每类保持架故障随机选择90%的样本数据用于训练,10%的样本数据用于测试。
最终实验数据集包含有3 150个训练样本和350个测试样本。
2.2 EMD-SDP特征信息融合
笔者首先通过对故障振动信号样本数据进行EMD分解,得到了前6个模态分量;然后进行特征融合转换,生成了相应的故障SDP图像,得到了不同保持架故障状态下的SDP图像,如图5所示。

图5 不同保持架故障状态下的SDP图像
由图5可知:SDP分析可以充分地展示不同故障状态下的轴承保持架振动信号特性;不同保持架故障状态SDP图像之间主要差异在于围绕SDP镜像平面点的集中程度、图像曲率、厚度和形状特征,尤其是厚度和集中程度最为明显;当保持架由正常状态到不同故障程度状态时,SDP图像镜像平面各点集中度增加,厚度变小。
总之,不同故障信号模态分量特征融合获得的SDP图像可以清晰地表达出不同信号的原始特性,为下一步模型提取图像特征,实现故障分类奠定基础。
2.3 CNN故障诊断模型参数设定
故障数据样本特征融合生成SDP图像后,笔者将其作为CNN模型的输入。在构建二维卷积神经网络模型过程中,笔者通过选择合适的参数以确保较高识别率,同时减少模型训练时间。网络中,优化算法类型、滤波器层中卷积核数目和大小以及池化方式和大小等参数,都会影响模型训练速度和故障识别率。
该模型设计借鉴了VGG网络模型的3×3卷积核和2×2池化参数设置。研究表明,通过使用小卷积核可以对图像进行有效地特征提取,减少卷积层训练参数,并且通过多个小卷积堆叠可以有效提高分类识别精度[16]。
因此,笔者综合考虑故障识别率和训练时间进行层数设计。
不同卷积池化层数配置的实验结果如表1所示。
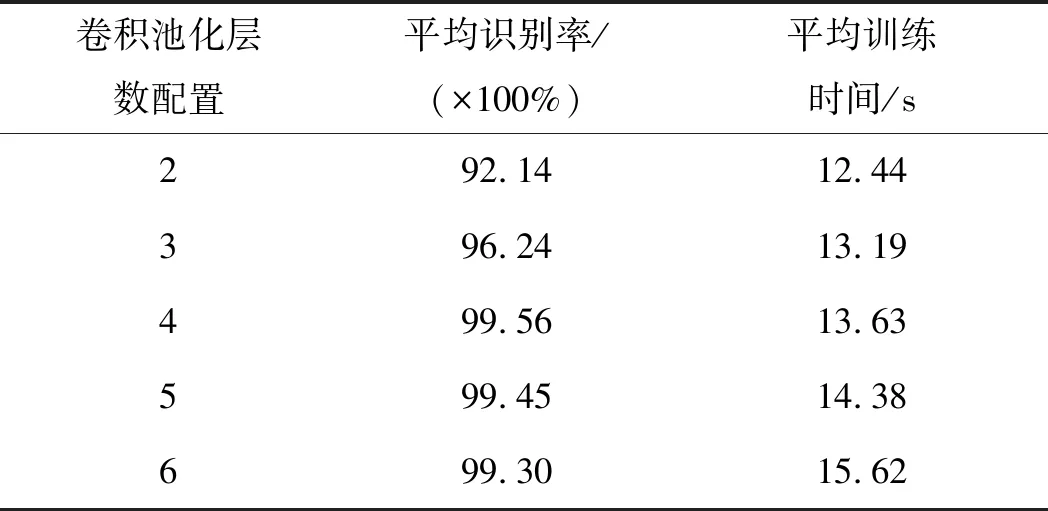
表1 不同卷积池化层数配置的实验结果
由表1可知,随层数增加,模型故障识别率和训练时间也随之增加,但层数过多会导致模型训练参数量增大,进而带来梯度消失和模型难以训练等问题。因此,经过综合分析可知,模型选择卷积池化层数为4时,可以获得较高的识别率,且训练耗时较少。
模型其他参数通过网格搜索法选择确定,得到CNN模型参数如表2所示。
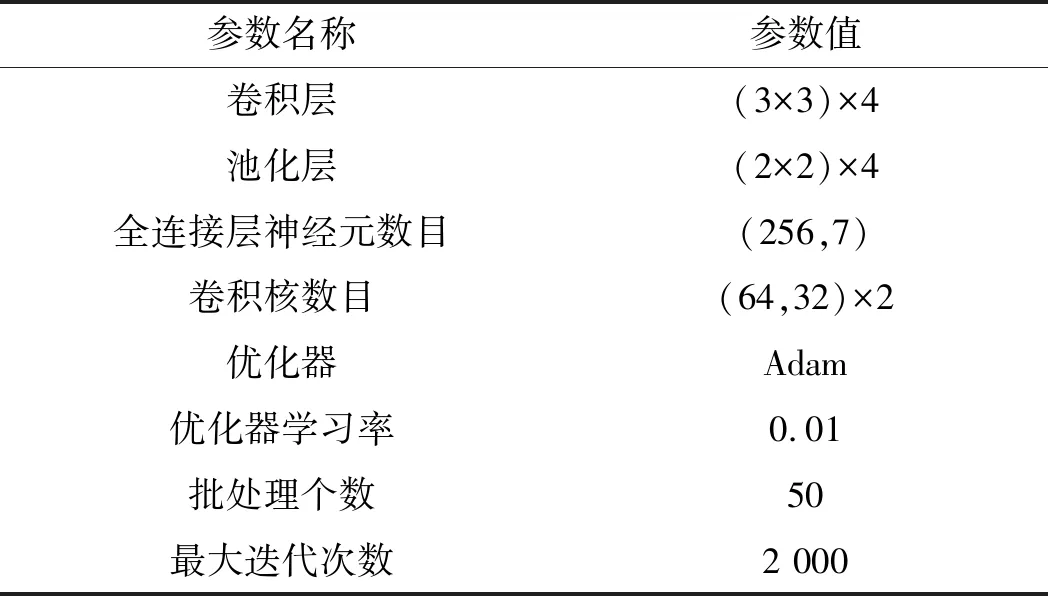
表2 CNN模型参数
笔者最终提出的CNN模型包含有4个卷积层、4个最大池化层、2个全连接层和1个softmax输出层;同时,该模型使用非线性修正单元(ReLU)作为激励函数。
2.4 实验及结果分析
该模型利用Google的Tensorflow和keras工具箱搭建。笔者考虑到网络权值随机初始化,为保证试验结果的可靠性,模型实施20次实验以获取识别率均值。
得到的实验样本识别率曲线如图6所示。
由图6的曲线可以看出,经过2 000次迭代后,样本识别率指标达到了99.50%以上。该结果表明,本文所提出的故障诊断方法是有效可靠的。因此,使用基于EMD模态分量特征信号融合的SDP分析方法,可以更充分显著地表达原始信号特性。
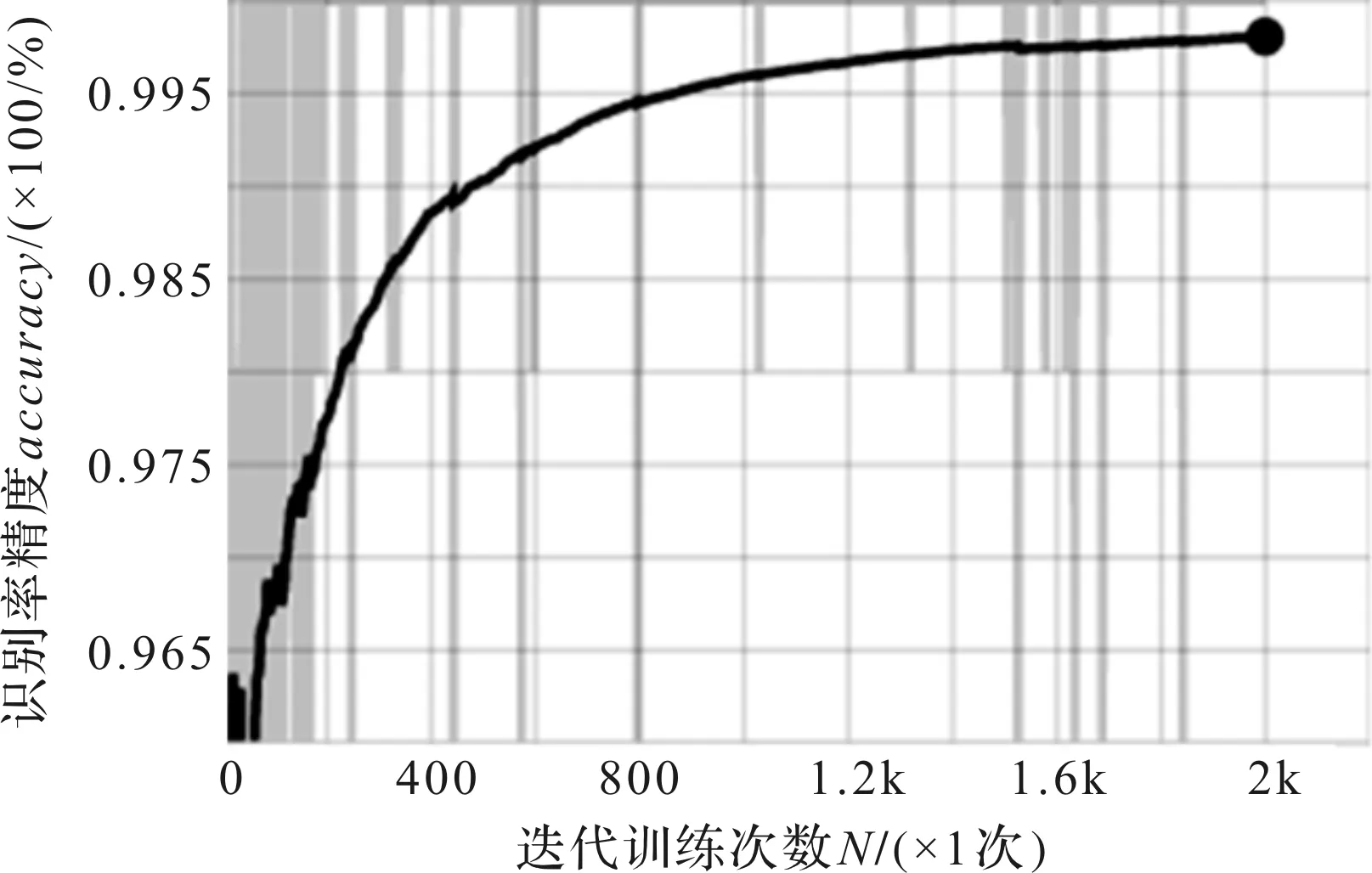
图6 样本识别率曲线
2.5 算法对比实验
为了比较本研究算法与人工特征提取加分类器组合算法的诊断效果,笔者通过实验对比本研究方法与提取小波包系数熵加支持向量机分类算法的识别性能。
对比算法通过一对多的方法建立多个支持向量机组成多分类器,输入分类器的特征向量通过小波包分解保持架故障信号得到小波包系数,并求解小波包系数熵,然后将熵值作为提取特征指标输入SVM,以识别故障的损伤程度。
笔者通过实验对比两种算法在不同保持架故障状况下的故障识别率,每组分别进行20次实验,并获取故障诊断率均值作为评价标准。
最终得到算法对比实验结果如表3所示。

表3 算法对比实验结果
由表3可知:
(1)本研究算法具有高达99%以上的整体故障识别率,其结果优于对比算法;尽管对比算法的诊断性能表现也相当好,但考虑到对比算法需要选择合适的小波基函数求取小波包系数,其特征选择可能因不同的数据集而不同,所以在选择小波包基函数方法时存在一些问题;同时,信号时频转换过程比较耗时,再加上支持向量机分类器本身具有的浅层网络结构,限制了其故障诊断能力的进一步提高;
(2)本研究所提算法发掘了深度学习强大的非线性特征学习能力,即由“端到端”,通过一个网络模型完成了特征提取、特征降维与模式分类的全套过程;
(3)除裂纹0.5 mm、2.5 mm和断裂故障下,两种算法识别率相近以外,其余的4种不同保持架故障状态下,对比算法识别率都在95%左右;在裂纹1.5 mm故障下,仅有82%的识别率,而本文算法识别率结果均在99%以上,识别效果明显优于对比算法;同时,对比算法在数据样本上的标准偏差几乎是本研究算法的两倍,这说明本研究算法比对比算法更稳定。
考虑到本研究算法的故障诊断率波动较小,因此,该结果证明本研究所提算法可以应用于实际轴承设备保持架故障的诊断。
3 结束语
本研究提出了一种基于经验模态分解与对称点模式特征融合的卷积神经网络故障诊断方法;通过对保持架故障振动信号的EMD模态分量进行特征信息融合,然后利用CNN进行SDP图像识别,最终实现了对轴承保持架的故障诊断。
实验及研究结果表明:本文所提出的方法能够更全面、直观地表现出其原始振动信号特性,进一步验证了本文方法的有效性;结合CNN可以实现SDP图像的自适应特征提取和故障分类识别。
与其他信号处理方法相比,本文所提出的研究方法具有更好的学习效果和更高的识别精度。
猜你喜欢
一重技术(2021年5期)2022-01-18
基层中医药(2021年12期)2021-06-05
哈尔滨轴承(2021年4期)2021-03-08
哈尔滨轴承(2020年3期)2021-01-26
智族GQ(2019年9期)2019-10-28
英美文学研究论丛(2018年1期)2018-08-16
电子制作(2018年10期)2018-08-04
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28
轴承(2014年12期)2014-07-21
电测与仪表(2014年23期)2014-04-04
