
各向异性永磁同步电机低速控制策略
2021-01-21 07:03赵慧峰刘琳
电气传动 2021年2期
赵慧峰 ,刘琳
(1.三门峡职业技术学院智能制造学院,河南 三门峡 472000;2.河南科技大学应用工程学院,河南 三门峡 472000)
永磁同步电机(permanent magnet synchronous motor,PMSM)由于其效率高、动态响应快和功率密度高在各种工业领域中得到了广泛的应用[1-3]。而PMSM的无速度传感器技术成为了近年来的一个研究重点,因为其不需要机械传感器,可显著降低成本和提高可靠性。同时,随着PMSM应用范围趋于广泛,PMSM拓扑结构得到了创新,如转子各项异性乃至纯同步磁阻电机等[4]的诞生。适当增加各向异性后使得PMSM在无速度传感器控制上更具有优势,包括高速(延伸至弱磁区)和低速运行工况。
对于PMSM的无速度传感器控制技术,目前已经有较多文献进行了报道[5-18],具体可按照电机运行转速分类[5]。对于低速运行,即电机转速低于额定转速的20%时,可将高频电流叠加在基频电流上注入,利用转子各向异性观测转子位置[6-8]。在更高的速度下,可以使用基于基频信号的观测器实现转子位置观测,如反电动势(backelectromotive force,BEMF)观测器或磁链观测器[9-10]。文献[11]、文献[12]同时使用了高频注入和观测器这两种技术,即合并两种技术,但仅在过渡区能共同工作。然而,持续的高频注入对PMSM驱动性能不利,因为其将导致转矩脉动,并产生额外的噪声和振动。值得注意的是,有一些应用场合不需要在整个转速范围内闭环调节,首先可以用开环方式启动,然后在适当转速时进行闭环控制,这样可以消除高频注入问题[13]。文献[14]采用自适应集总电动势模型预测控制得到电机初始位置,这虽然解决了电机启动问题,但稳态闭环调节最小转速仍与基于BEMF的无速度传感器控制方案的性能相关。通常,电压测量的信噪比将使得基于BEMF的转速估计在低速时失效。文献[15]通过滑模观测器扩展了运行转速范围,但对控制参数强依赖。文献[16]中研究了逆变器非线性引起的谐波与可控转速下限之间的关系,结论为低速时观测器带宽的减小可改善抗干扰能力,使调速范围扩大。而文献[17]对逆变器中的电压误差进行适当补偿,也可扩大转速调节范围,但补偿算法需要进行精细的参数整定才能具有较好的效果。文献[18]指出当转矩和转速具有不同的符号时,即电机在发电模式下将出现不稳定,故在高频注入和BEMF估计之间给出了选择过渡区,可避免发散,代价是延长了高频注入信号的使用时间。
基于上述文献研究,本文设计了一种新型的PMSM低速控制方案。新型控制策略是基于改进的BEMF观测器来实现的,避免了传统观测器可能出现的不稳定,从而使转速调节范围向下扩展,且无需注入高频信号。最后,进行了新方案的实验验证。
1 BEMF观测器分析
PMSM的数学模型可用电压方程描述如下:

其中
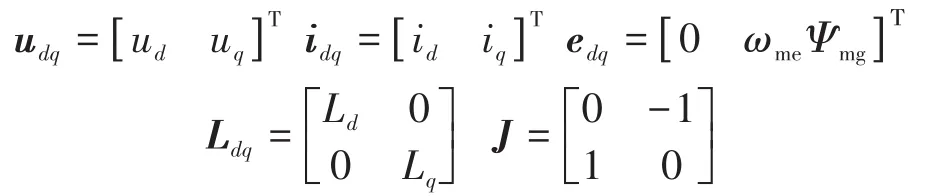
式中:ud,uq分别为定子电压d,q轴分量;id和iq为定子电流d,q轴分量;Ld和Lq为d,q轴定子电感;R为定子电阻;Ψmg为永磁磁链;ωme为转子电角速度;p为极对数;ωm为转子机械角速度;edq为BEMF矢量;J为常值矩阵。
值得注意的是,由于PMSM通常具有磁饱和特性,故电感取决于id和iq,故式(1)中的电感矩阵必须考虑定子电流影响。无速度传感器控制中需估计转子位置θme。由于矢量edq与转子轴方向正交,因此可以由BEMF观测器来间接估计转子位置。根据观测器估计的转子位置定向dq坐标系,可得:

其中:上标“^”为对应变量的估计值。

式中:δ为转子位置估计误差。

联立式(2)和式(4)可得:


其中

式中:Id,Iq为工作点电流d,q轴分量;Ωme为工作点转速。
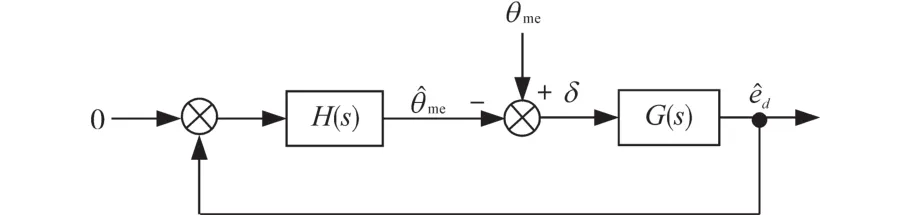
图1 位置估计框图Fig.1 Block diagram of the position estimation
在图1中,如果设ωme为常数,则可以将转子位置θme视为斜坡变化的扰动。根据自动控制原理,H(s)需包含要抑制的扰动模型,即采用双积分器才能达到控制目标。控制器还要满足将调节为零的要求,此外,为了使控制器的设计独立于工作点,设计H(s)为

式中:kp和ki分别为PI调节器的比例和积分系数;s为拉普拉斯算子;kwp为取决于工作点的增益;LΔ为d,q轴电感差值。
可利用估计量进行计算如下:

图1中,H(s)为PI调节器和纯积分调节器的级联。式(6)中的分子是一个超前补偿器,为了整个反馈闭环的稳定,必须在选定的增益对应穿越频率点上产生令人满意的相角裕度。式(6)中出现的零点可以是最小相位零点或非最小相位零点,取决于Iq和Ωme的符号。当Iq和Ωme的符号相同时,电机处于电动机模式,式(6)中出现的零点具有最小相位,否则为非最小相位零点,对应为电机工作在制动模式。
对于式(6)中出现的零点是最小相位零点,则单零点补偿器足以稳定整个闭环。若式(6)中出现的零点是非最小相位零点,则使用单零点补偿器达不到预期效果,故需要引入额外的相位超前来补偿非最小相位零点在高频下引入的相位滞后。可以限制最大控制带宽来保证PMSM在任何运行条件下都稳定,然而这样的设计过于保守。
另一种方案是在观测器的工作区域上设置边界,这需要分析观测器的稳定性限制,即d,q轴电流的极限。
图1所示闭环系统的极点即对应特征方程的根,特征方程为传递函数的分子,特征方程及其根如下所示:

其中

式中:p0,p1和p2为特征方程的系数;H(s)G(s)为开环传递函数。
要满足反馈系统稳定,闭环极点必须具有负实部,根据经典控制理论,只要p0,p1和p2的符号相同,则可以保证稳定性。那么根据转速和电流的符号,可进行分类讨论如下。
首先,假设ωme>0(对于ωme<0,结论是类似的)。其次,假设Id≤0,这通常发生在磁场定向控制电机以最大转矩电流比(maximum torque per ampere,MTPA)运行时[19]。由于LΔ<0,因此式(9)中的系数符号由Iq的值确定如下:
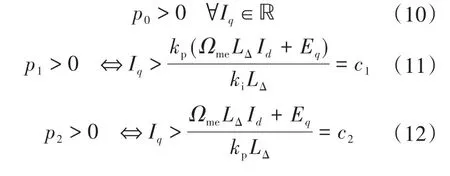
式中:c1和c2为判据值。
因此,如果满足下式,观测器是稳定的。

根据先前引入的假设,即Ωme>0,Id≤0和LΔ<0,则c1和c2总为负,这可以得出结论,观测器仅在Iq为负的情况下可能变得不稳定。式(11)的条件取决于转速、控制器参数、永磁磁链、各向异性LΔ及d轴电流Id。永磁磁链定义为正,只要Lq>Ld,各向异性LΔ即为负。将LΔ乘以负的d轴电流将添加一个正项到Ψmg,这减小了由c1设定的下限。换句话说,负的d轴电流增加了观测器的稳定工作区域。另一方面,稳定区域在很大程度上取决于控制器参数,这需要增加设计约束。
2 改进型BEMF观测器
基于前述分析,设计改进BEMF观测器以解决不稳定性问题。导致观测器不稳定的原因是式(6)中存在非最小相位零点,故修改BEMF观测器的方程如下:

其中

式中:Lqd为新的电感矩阵。
对比传统观测器式(2)和改进观测器式(14)可得以下关系:


对式(16)进行小扰动线性化处理可得到:
这清楚地表明了如何通过施加零eˆ'd分量来使位置估计误差δ为零。使用改进观测器后,由式(6)描述的给定工作点附近的传递函数G(s)变为

式(18)中没有零点,因此可以任意选择控制带宽和相角裕度,闭环系统均是稳定的。H()s保持与之前式(7)相同,式(7)期望的增益对应穿越频率ωc处特定的相角裕度φm由下式得到:

新的BEMF观测器可保证在任何工况下系统的稳定。对于BEMF信号中的高次谐波,可通过相位超前补偿器处理,使得在高频下具有较好的噪声抑制能力。式(7)可由下式代替:

式中:k,τ和α为设计参数,同时必须满足以下条件:k>0,τ>0和0<α<1。
合理设置补偿器参数后可使控制器具有所需的带宽和相角裕度,具体为
图2为改进型BEMF观测器原理图,图中可看出其基于式(14)由D变换后的和,以及估计出反电动势,然后经过相位超前补偿器H(s)处理后可获取较为准确的位置角。
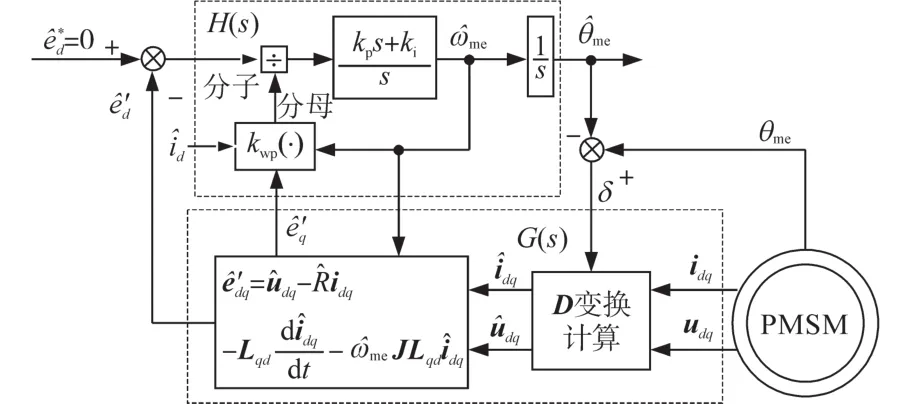
图2 改进型BEMF观测器原理图Fig.2 Schematic of the improved BEMF observer
图3为传统BEMF观测器和改进型BEMF观测器的伯德图对比图。由图3可知,相位超前补偿器H(s)在高频段的衰减更大。

图3 H(s)G(s)伯德图对比Fig.3 Bode diagram comparison of the H(s)G(s)
3 实验验证
为了验证所设计的各向异性PMSM低速控制策略,构建了PMSM驱动实验平台,开展了相关实验。图4为测试平台示意图。图4中,设置了一个转子位置反馈选择开关SW,当SW=1时选择测量得到的转子位置,而当SW=0时,采用估计的转子位置作为反馈。增加选择开关是为了配合后续的不同测试。基于两台PMSM开展实验,参数如表1所示。

图4 测试平台示意图Fig.4 The schematic of the test platform
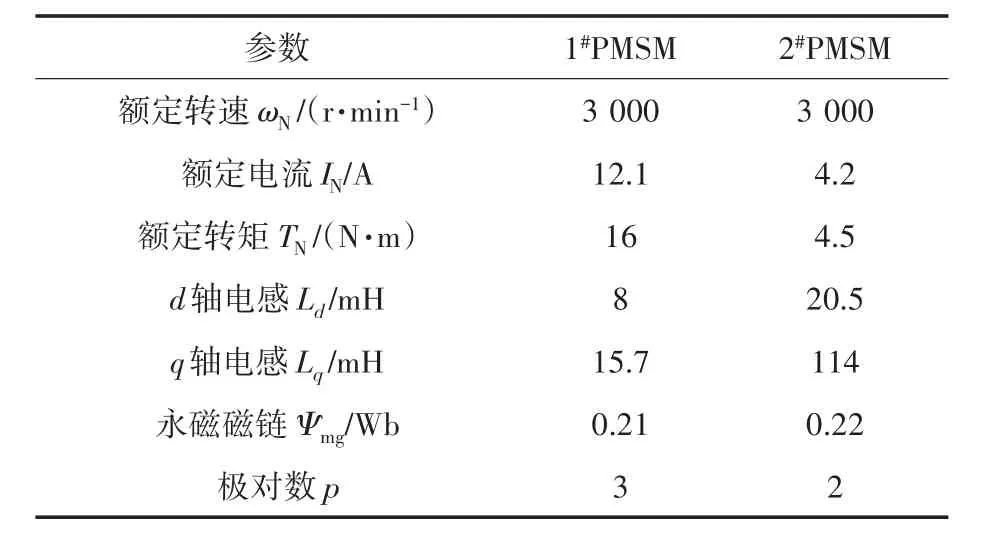
表1 电机参数Tab.1 Parameters of the motors
3.1 1#PMSM测试结果
通过在图2中设置e∗d阶跃变化可测试所提出的改进型BEMF和传统BEMF观测器的动态响应。在测试期间,设置SW=1,因为测试目标是评估观测器性能。电机处于转速控制模式,同时拖动转矩为-0.25TN,使其在制动模式下工作。图5为e∗d阶跃变化测试结果。由图5可知,传统BEMF观测器具有明显向下的超调,这是非最小相位零点导致的,但改进型BEMF观测器消除了该超调,性能增强。
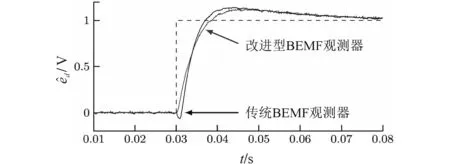
图5 e∗d阶跃变化测试结果Fig.5 Test results of the e∗dstep change
在许多应用中,控制各向异性较小的PMSM时,往往忽略磁阻转矩分量并设置id=0而非采用更复杂的MTPA控制。在这种情况下,使用传统观测器需更加注意,因为各向异性可能导致不稳定。下面采用1#PMSM进行测试,因为其具有更低的各向异性。图6为拖动转矩增加时,采用改进型BEMF和传统BEMF观测器的对比测试结果,其中曲线A为改进型BEMF方案,曲线B为传统BEMF方案。

图6 拖动转矩增加时的测试结果Fig.6 Test results at increasing dragging torque
测试中设置SW=1以保持系统稳定,同时采用观测器获取,但不用于反馈。调整H(s)的参数使得ωc=80π(rad/s)和φm=80°。电机以低速(0.04ωN)运行,并且在t=1 s时增加拖动转矩。图6c中曲线A(改进型BEMF方案)对应工作点Id=0,在这种情况下,根据式(13)的计算为Iq>-0.346IN,标记在图6b中为TH1,测试结果表明采用传统观测器时,位置估计误差δ在Iq达到阈值TH1之后即发散。图6c中曲线B(传统BEMF方案)对应工作点Id=-0.32IN,这是MTPA控制时对应额定负载下施加的电流。根据式(14)可计算得到Iq>-0.4IN,标记在图6b中为TH2,同样,测试结果表明采用传统观测器时,位置估计误差δ在Iq达到阈值TH2之后即发散。图6c中曲线C为采用改进型BEMF观测器的测试结果,设置Id=0,因为此时为最恶劣的运行条件,测试结果表明系统一直保持稳定直至Iq的改变结束。
图7、图8为设置SW=0时,使用估计转子位置时的PMSM低速驱动控制测试结果,其中曲线A为改进型BEMF方案,曲线B为传统BEMF方案。

图7 转矩固定转速斜波下降的测试结果Fig.7 Test results with torque fixed and speed ramp drop
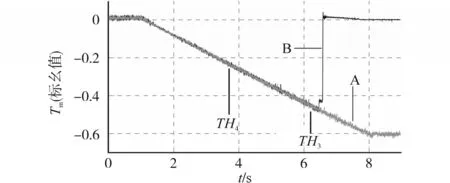
图8 转速固定转矩斜波增加的测试结果Fig.8 Test results with speed fixed and torque ramp increase
图7为恒定负载转矩0.5TN,设置斜坡减速的转速波形。由于式(13)计算得到的不稳定阈值和转速相关,故存在使传统观测器变得不稳定的最小转速,即TH3=0.078ωN,测试结果显示当转速达到TH3后,系统发散。在同样的测试条件下,采用改进型的BEMF观测器可以使系统在0.015ωN以上范围内保持稳定控制。
图8为保持转速恒定为0.04ωN,设置负载转矩从0增加至0.6TN的测试波形。由前述推导采用传统观测器对应的转矩阈值TH4=-0.25TN,实验结果显示实际阈值约为TH5=-0.48TN,这是因为电机的磁饱和降低了实际阈值,当运行转矩超过阈值后,系统发散。在同样的测试条件下,采用改进型的BEMF观测器可以使系统保持控制稳定。
3.2 2#PMSM测试结果
相对于1#PMSM,2#PMSM的各项异性更为明显,如表1所示。同时,电机谐波含量更高,考虑到BEMF观测器仅基于基频,谐波可能会对系统造成不利影响,故前述设计的相位超前补偿器是一种较好的对策。
图9为电机空载时转速从0.15ωN降至0.1ωN的测试结果,其中曲线A为测量转速曲线,曲线B为改进型BEMF方案得到转速曲线,曲线C为传统BEMF方案得到转速曲线。
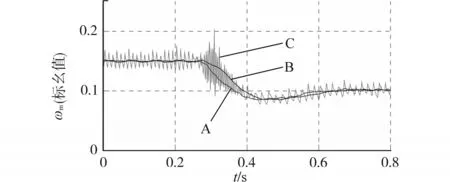
图9 空载转速下降测试结果Fig.9 Test results of speed drop with no load
图9中,两种观测器的参数都调整至ωc=20π(rad/s)和φm=80°。出于安全考虑,设置SW=1。由于电机空载运行,故电压测量的信噪比非常低,对BEMF观测器来说是非常严酷的条件,从测试结果来看,相对于传统观测器设计,采用相位超前补偿器产生了更平滑的转速信号。

图10 固定负载转矩转速下降测试结果Fig.10 Test results with speed drop and fixed load torque
图10为电机拖动转矩为-0.15TN固定负载转矩时的转速从0.15ωN降至0.1ωN的测试结果,其中曲线A为测量转速曲线,曲线B为改进型BEMF方案得到转速曲线,曲线C为传统BEMF方案得到转速曲线。由图10可知,改进型BEMF观测器没有出现任何不稳定并保持了较好的转速估计精度。而传统观测器在电机低速时产生了明显的振荡。进一步,设置SW=0进行闭环测试,结果如图11所示。考虑到零转速时,基于BEMF的观测器不能单独工作,故首先设置SW=1启动2#PMSM后在t=1.25 s再改变SW=0激活观测器。测试时转速控制为0.2ωN,突加0.5TN的负载转矩。测试结果显示采用相位超前补偿器后,在突加负载后,改进型BEMF观测器也表现出平稳的运行,即图11a所示突加负载扰动后转速保持了观测值较为恒定。
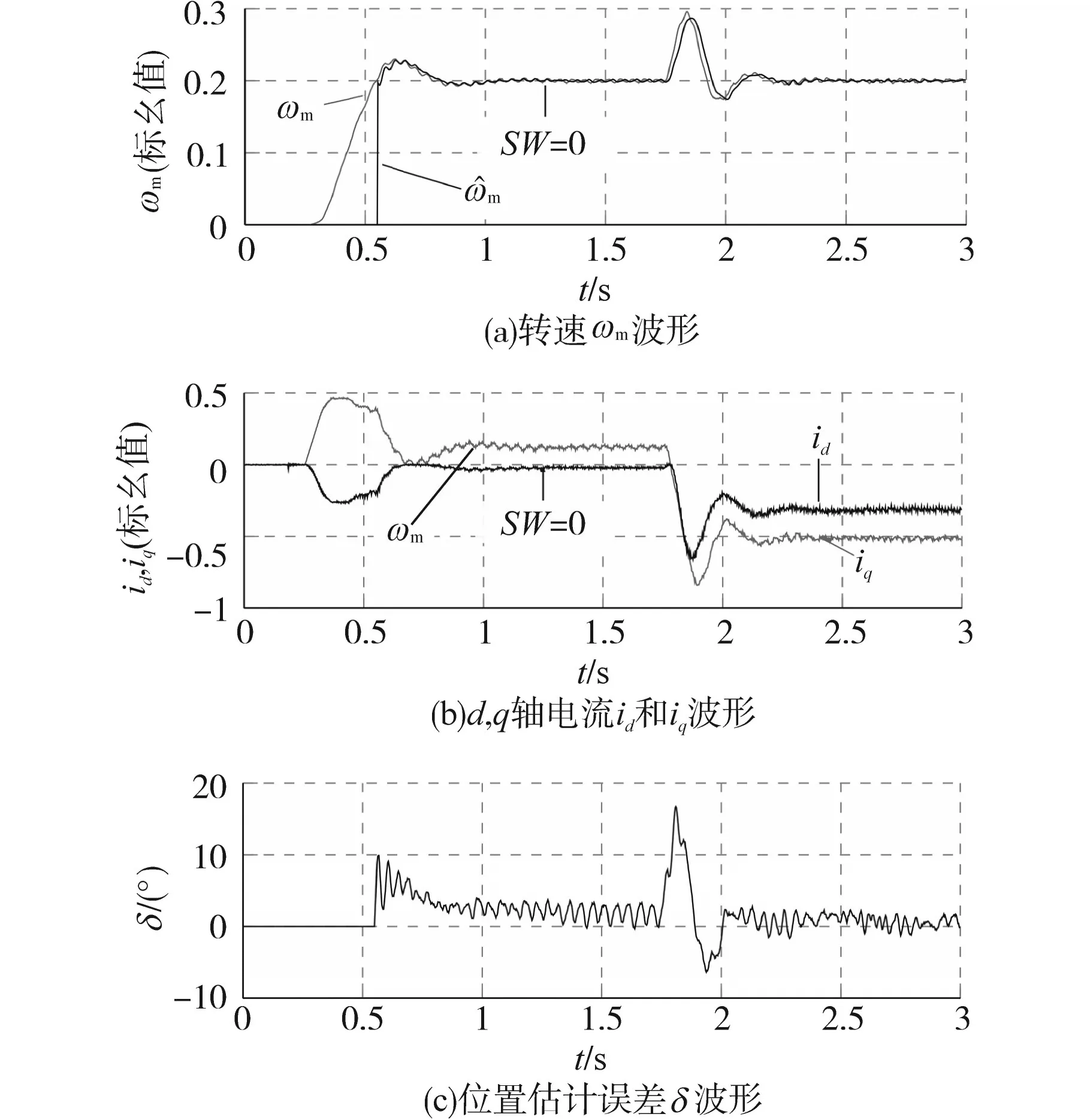
图11 无速度传感器闭环控制测试结果Fig.11 Test results of speed sensorless closed-loop control
4 结论
围绕各向异性PMSM的无速度传感器控制策略在低速区的扩展,本文设计了一种基于改进BEMF观测器的新方案,总结全文为:
1)传统BEMF观测器由于存在非最小相位零点,在电机低速时可能导致系统不稳定,而改进型BEMF观测器通过引入新的变换,以及相位超前补偿器改善了控制结构,从而增强了系统稳定性;
2)对比实验结果显示,相对于传统BEMF观测器方案,改进型BEMF观测器能显著改善PMSM低速区运行特性,同时相位超前补偿器对各向异性产生的谐波具有明显的抑制作用,控制性能优良;
3)进一步的研究方向为:分析故障发生后的系统特性,设计有容错能力的观测器。
猜你喜欢
一重技术(2021年5期)2022-01-18
数理化解题研究(2020年13期)2020-05-07
数学物理学报(2019年5期)2019-11-29
测控技术(2018年4期)2018-11-25
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
电测与仪表(2015年19期)2015-04-09
电机与控制应用(2015年2期)2015-03-01
电测与仪表(2014年13期)2014-04-04
电测与仪表(2014年11期)2014-04-04
