PPP-RTK模糊度快速固定算法研究
2021-01-21 04:46商庆华成芳沈朋礼肖厦
全球定位系统 2020年6期
商庆华,成芳,沈朋礼,肖厦
(1. 中国科学院国家授时中心,西安 710600;2. 中国科学院精密导航定位与定时技术重点实验室,西安 710600;3. 中国科学院大学,北京 100049)
0 引 言
目前全球卫星导航系统(GNSS)正在快速发展,卫星导航定位服务的要求和一些增值内容的要求随用户的需求增加而增高,多种精密定位技术随之被提出. 在GNSS参考网中,若按照布设的参考网范围不同,GNSS参考网可以分类为全球、广域和局域网等三种类型[1]. 不同类型的参考网提供的改正信息在表示形式以及信息播发方式上都存在差异性,从而产生了多种多样的流动站定位模式,不同的定位模式对流动站位置获取的时效性也存在差异性[2]. 其中运用较为广泛的精密定位技术是基于差分模式的网络RTK(NRTK)以及基于局域参考网,侧重于双频改正的精密单点定位(PPP)[3-4]. 但NRTK往往因为需要大量参考站的支持,用户数据通讯的负担大;而传统的PPP采用浮点解,即整周未知数参数实数化,其定位结果的精度及可靠性没有差分定位模式的效果好[5]. 此外,若要使得定位精度达到厘米乃至毫米级别,初始化的时间往往太过长久,从而限制了PPP技术在快速精密定位与定轨等领域中的应用[6]. 2019年武汉大学姚宜斌等[7]做了区域大气增强产品对实时PPP的影响试验,试验结果表明传统实时静态PPP单天点位平均收敛时间仍需40~70 min,但是加上大气约束后,结果有明显的改善. 对于PPP技术,初始化时间较长和受制于外部卫星的钟差与轨道误差是限制实时PPP应用的两个主要方面. 解决这个问题的关键是快速的固定模糊度,也是当前国际GNSS领域的研究热点和难点[8]. PPP-RTK技术融合了NRTK技术与PPP各自的优势,主要有两大优点:一是极大地提高了静态和动态PPP定位的精度和收敛速度;二是拓展了网络RTK的服务范围,用户在参考网外仍可获得与网内相当的定位精度[9]. 在数据处理的方面也相对比较简单,可以实现广域乃至全球的精密定位服务,因此研究PPP-RTK是十分有必要的.
对于PPP-RTK的处理方案,当前已有多位学者进行了多方面的研究,ODIJKDenni等[10]提出通过将参考站所有伪距以及载波相位观测值进行联合处理, 对其中的基准参数加以约束,并通过固定的卫星位置和参考站数据,使得各类参数被逐历元估计求解并获得各类改正信息的PPP-RTK方法,但是因为选取站点的高程差异较大,为了避免对流层内插时产生严重的误差,该方法没有对对流层延迟进行内插处理;此外,因为在进行数据处理的时候选择随机游走过程对卫星相位偏差(SPBs)进行状态模型处理,所以时变特性不能正确地进行描述,需要更加准确地检验处理. 邹旋等[11]提出了一种附加伪距精化的PPP-RTK区域地基增强信息单参考站生成方法,使得区域地基增强PPP-RTK用户仅需几个历元的观测数据进行模糊度固定,便能满足厘米级的PPP应用需求,但在模糊度固定时,采用LAMBDA算法进行搜索,可能出现模糊度可靠性不高的情况,从而对定位产生一定的系统误差. 张宝成等[2]在2015年提出了一种局域GNSS的单频PPP-RTK数据处理方法,减少了数据处理上面的负担,但在如何进行快速收敛的问题上没有进行深入的探讨.
本文在原有PPP-RTK模型的基础上,优化传统PPP-RTK模糊度固定算法,提出一种优化模糊度快速固定的解决方案,采用星间单差的方法,将一些参数消除或减弱,数据处理的过程更加简单,从而实现了模糊度快速固定,收敛时间大大减短,同时可靠性也大大提高. 并用IGS 40个站点观测数据对优化后的算法进行了试验验证.
1 PPP-RTK模糊度固定基本理论
先从GNSS基本观测方程出发,推导出将参数处理后的模糊度固定方法,在用MW组合得出模糊度浮点解后,利用星间单差的方式,得出星间单差未校准硬件延迟(UPD)的解算方式,分别对宽巷模糊度与窄巷模糊度的浮点解进行解算,之后用迭代法得出模糊度固定解.
1.1 GNSS观测方程
在PPP中,通常卫星轨道和钟差可以通过IGS分析中心提供的精密轨道和精密钟差(含有卫星端伪距硬件延迟改正),对于接收机硬件延迟偏差,我们可以与接收机钟差合并吸收的方法进行处理[12].
GNSS的伪距观测值和载波相位观测值可以表示为
(1)
式中:P为伪距观测值;L为载波相位观测值;下标i表示该误差与信号的频率有关;ρ为卫星到接收机之间的几何距离;δorb为卫星的轨道误差;δtS与δtR分别为卫星钟差与接收机钟差;I表示电离层延迟;δtrop为对流层延迟;b为硬件延迟;φ0,S为卫星的载波相位信号的初始相位小数偏差;φ0,R为接收机的载波相位信号的初始相位小数偏差;λ为波长;N为以周为单位的载波相位信号的整周模糊度;ε为误差.
本文在进行数据处理的时候,采用的是国际GNSS服务(IGS)精密星历,其中的轨道误差项是可以忽略不计的[13-15]. 目前,IGS提供的卫星轨道是在ITRF框架下生成的,利用其星历产品进行PPP可以直接获得ITRF框架下的坐标,因此不用考虑坐标系统的转换[16]. 对于时间基准,文献[17]的研究表明在短时间内接收机端硬件偏差变化较为缓慢,故可看作常数,对于不同频率上的接收机端偏差可表达成式(2)形式,为了方便起见,可以将与卫星导航定位相关的硬件延迟偏差与钟差参数合并在一起,记作广义钟差
(2)

(3)
由式(3)可以看出,只要把电离层误差I与对流层误差δtrop以及广义钟差进行改正处理,那么就可以将载波相位模糊度N的整数性恢复出来.
1.2 模糊度解算
首先通过MW组合求解宽巷模糊度浮点解:
(4)

(5)


(6)


(7)
通过迭代法便可以重构电离层模糊度,并计算出PPP固定解:

(8)

2 试验设计与分析
2.1 试验数据说明
本文试验采用IGS 2019年10月19日的40个参考站观测数据,所选取的参考站位置分布图如图1所示. 观测值为无电离层组合四系统多频伪距和载波观测值,对流层误差采用Sasstamomnion模型进行改正处理,截止高度角为10.0°,当天31颗GPS可见卫星L1与L2的平均相位中心偏差如图2所示. 观测值采样间隔为30 s. 本文首先对观测值进行精度与收敛性分析,在本文中,以10 cm作为阈值,当连续20个历元的观测值在E、N、U三个方向的偏差均不大于10 cm的时候,则认为观测值已经收敛. 主要参数与解算策略如表1所示.
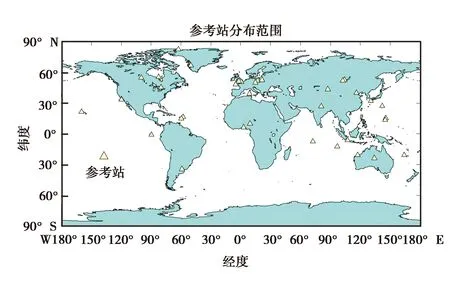
图1 选取的参考站位置分布图
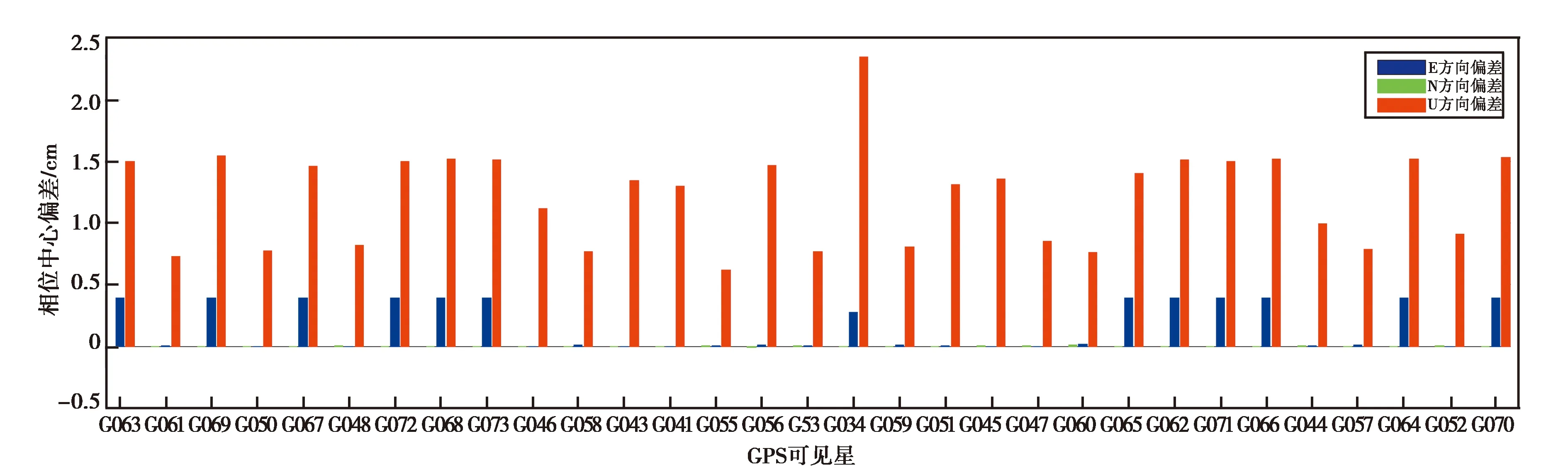
图2 卫星天线相位中心偏差
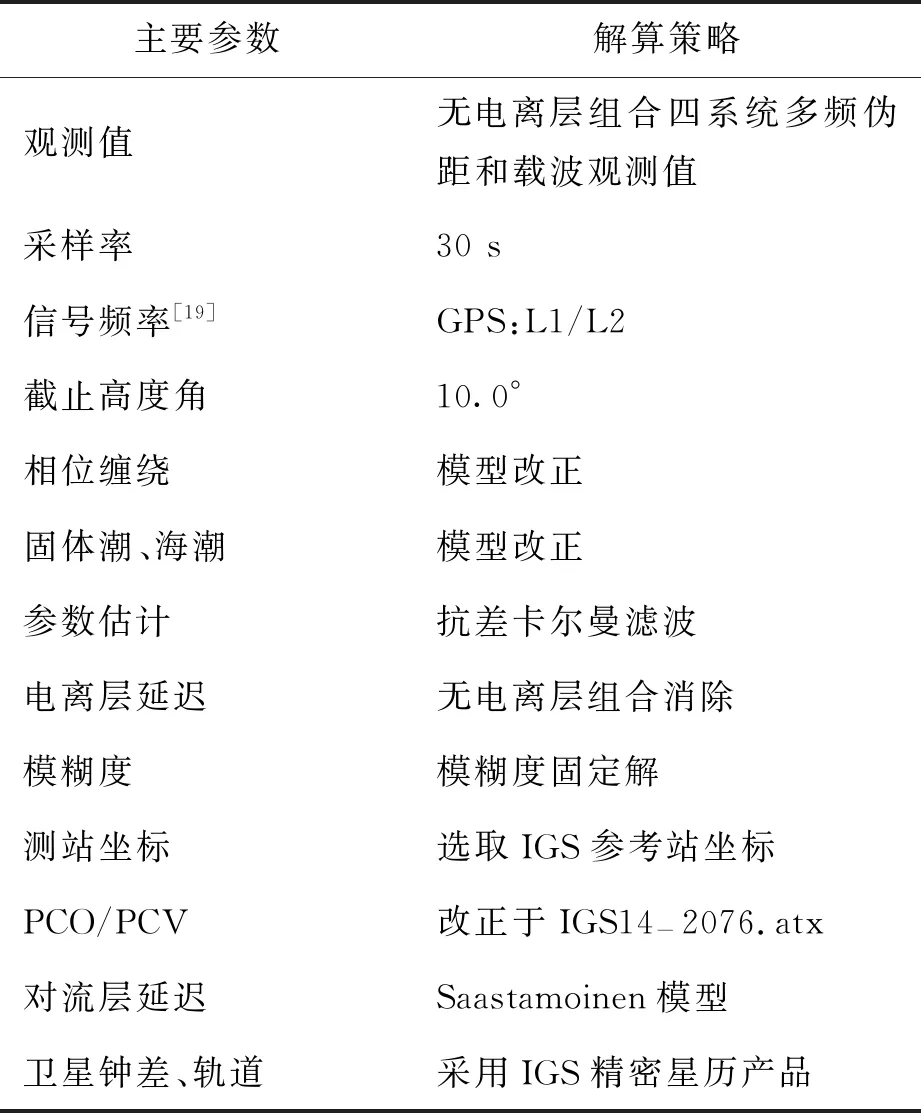
表1 观测值主要参数与解算策略
2.2 收敛性与精度分析
试验中,对测站进行了24 h观测,每30 s一个历元,共2 880历元,首先从E、N、U三个方向的偏差进行分析,以观测历元数为横坐标做收敛性分析. 本文以其中一个测站为例,如图3所示.
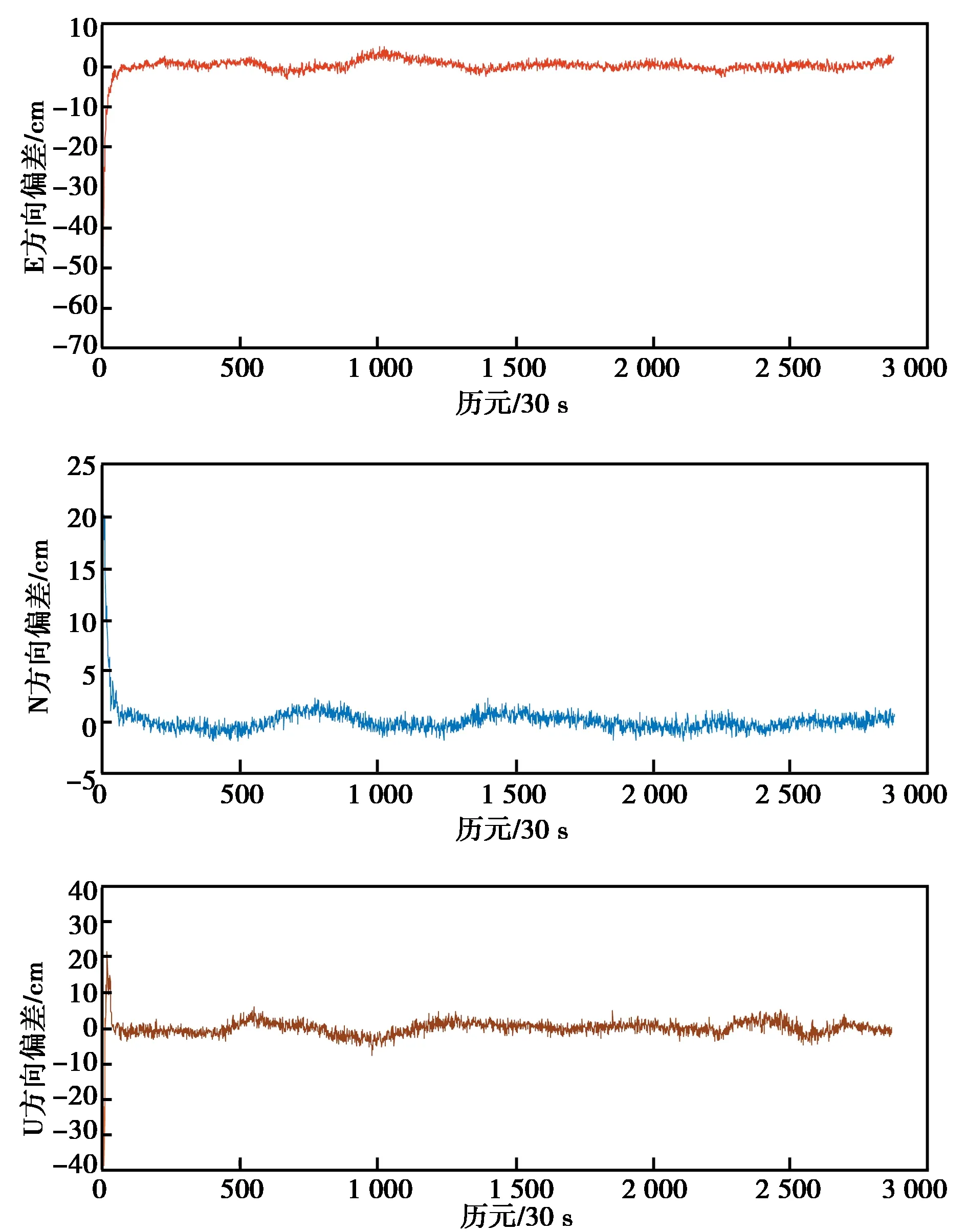
图3 E、N、U三个方向的偏差值
由图3可知,测站在经过初始化后,E、N、U三个方向的定位结果开始逐渐平稳;图4是测站在平面位置与高程方向的定位结果图;图5为测站在不同的时间段内的收敛率图,当到达20 min后,收敛率已经超过80%. 该测站在E、N、U三个方向的定位平均偏差RMS分别为3.3 cm、1.7 cm、5.4 cm. 在试验中,所有测站的定位结果均在厘米级.
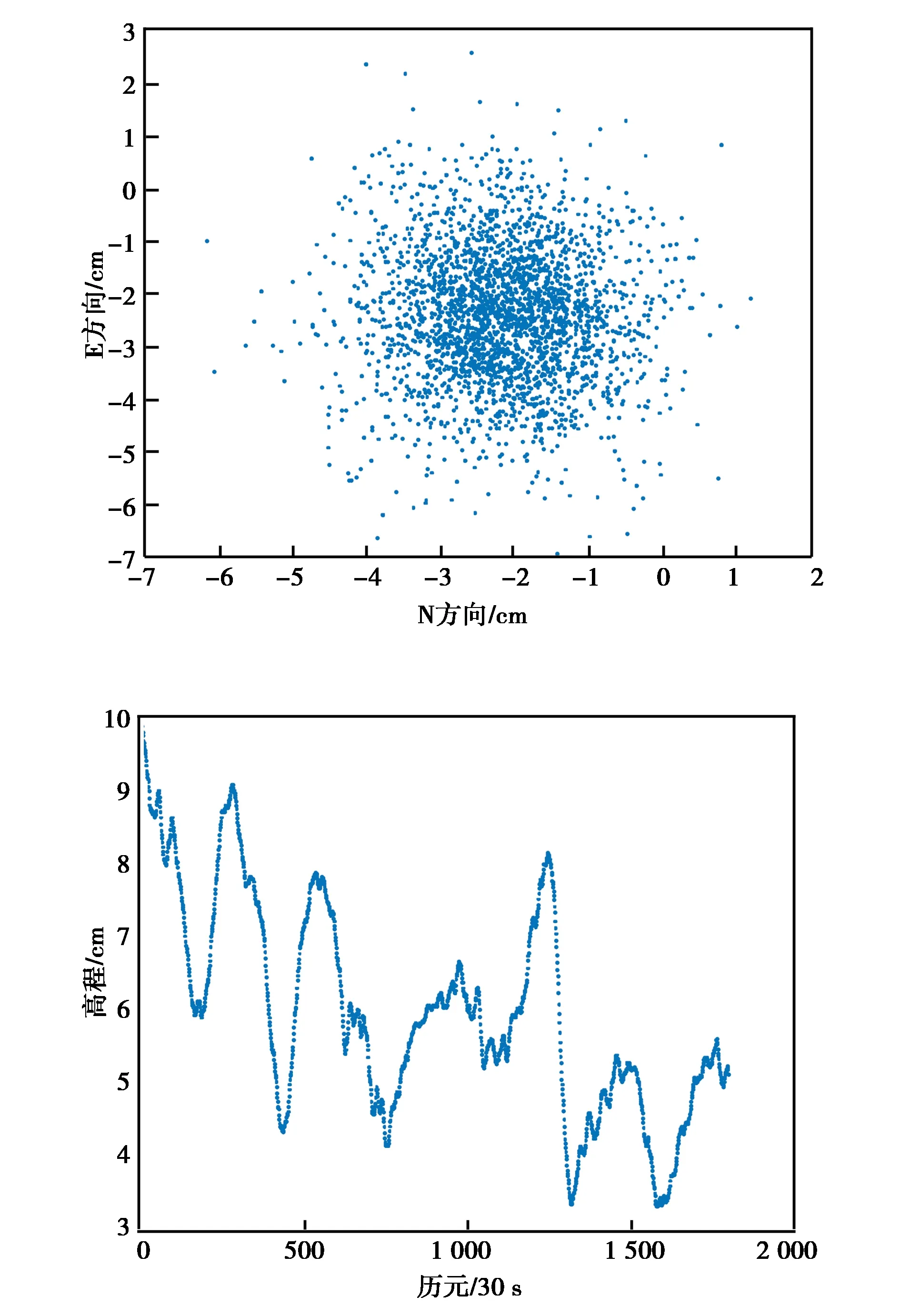
图4 PPP-RTK静态定位结果
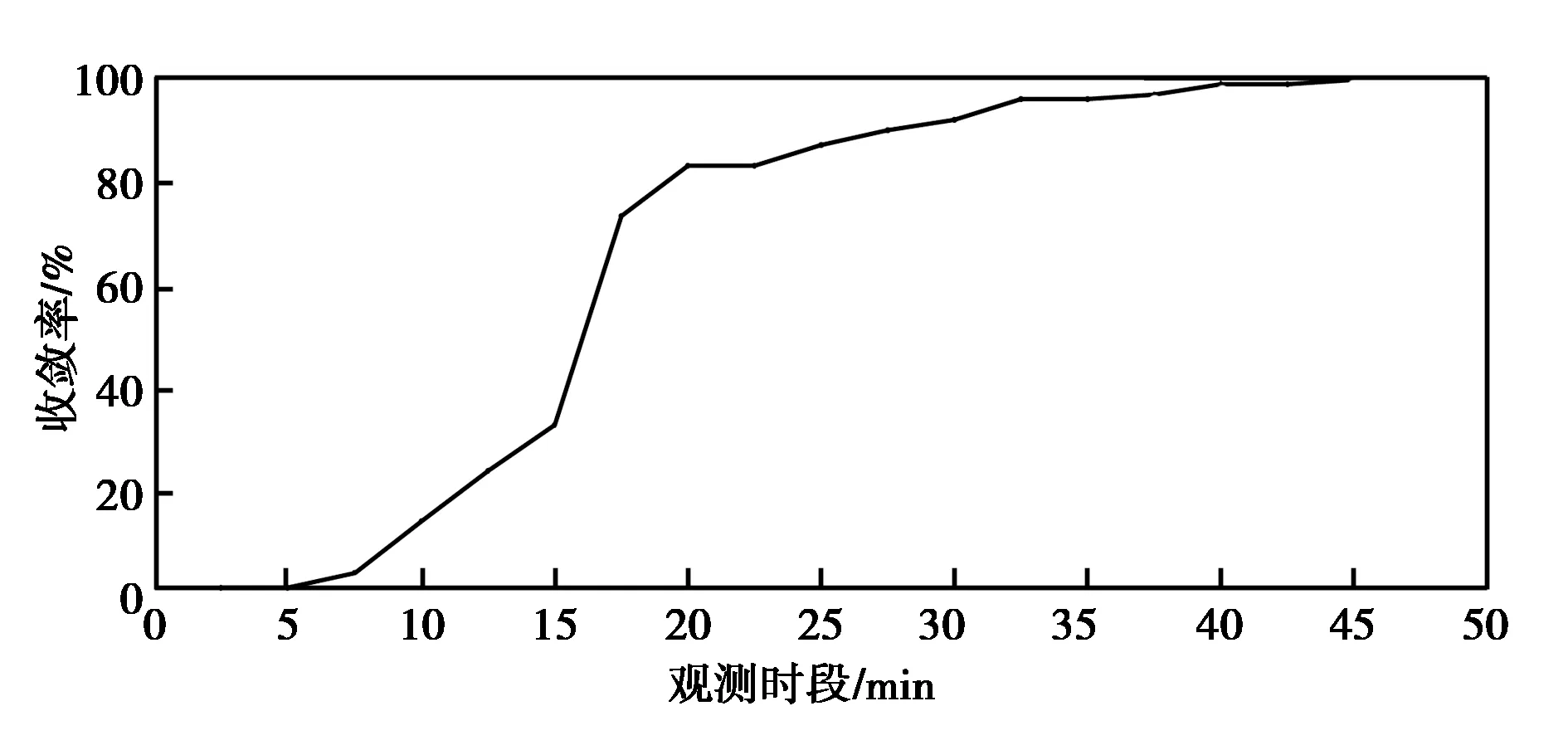
图5 PPP-RTK收敛率
由定位结果统计得,当模糊度被成功解算并得到固定解时,位置解算误差的均值(mean)都不大于3 cm,此时可以认为成功消除了系统误差,与定位相关的各类参数已经无偏,在这时候精度指标RMS与STD基本相同[1].
模糊度正确固定后,E与N方向的精度RMS均不超过3 cm,U方向的精度不超过5 cm,这主要是因为虽然采用IGS的精密星历参数,对流层延迟等误差的模型改正精度较高,残余误差对位置解算的影响可以忽略不计,但是在进行平面位置定位时可以通过选择卫星的分布,卫星基本成对称分布的情况,使得在平面位置测量中的距离偏差与卫星信号在大气传播路径上的误差得到相应的减弱与消除. 但是,由于观测到的卫星全部在水平面之上,在高程方向不能成对称分布,一些影响高程方向的系统误差没有被完全消除,使得在位置解算中,高程误差往往大于平面位置误差.
3 总 结
本文对GNSS精密定位的发展做了详细的回顾总结,并提出当前精密定位的热点技术PPP-RTK,该技术融合了PPP与NRTK的优势,并对各自的缺点进行了改进与回避. 但是相比较于PPP与NRTK,PPP-RTK的研究仍然具有一定的滞后性. 针对模糊度收敛慢的问题,本文阐述了一种优化的PPP-RTK模糊度解算的方案,该方案在可以节省很多关于误差改正方面的工作,在MW组合得到浮点解后,通过星间单差的方式便可以对模糊度进行固定,星间单差消除和减弱了很多影响定位进度的误差,模糊度的残余误差量大大减小,使得更加容易地进行模糊度固定. 实验结果表明,该算法处理静态数据时,平均收敛时间约为20 min左右,在平面位置上的平均定位精度(RMS)小于3 cm,在高程方向上的平均定位精度(RMS)不大于5 cm.
猜你喜欢
商界评论(2022年1期)2022-04-13
测绘地理信息(2022年2期)2022-04-02
中国空间科学技术(2021年1期)2021-03-16
学生天地(2020年6期)2020-08-25
导航定位与授时(2020年4期)2020-07-29
全球定位系统(2020年1期)2020-03-31
数学大王·趣味逻辑(2019年10期)2019-11-06
电机与控制学报(2018年9期)2018-05-14
草原(2018年2期)2018-03-02
移动通信(2017年11期)2017-06-20