一种基于局部激光高速节点骨干网络的星间链路拓扑规划与仿真优化方法
2021-01-21 04:46丁文左勇叶小舟刘文祥孙广富
全球定位系统 2020年6期
丁文,左勇,叶小舟,刘文祥,孙广富
(国防科技大学 电子科学学院,长沙 410073)
0 引 言
导航通信一体化是卫星导航系统的一大发展趋势[1]. 星间链路是实现自主导航,完成星间组网的必备信息传输通道,为构建天地融合一体化网络提供了可能[2]. 现有的微波频段星间链路随着资源频率趋于饱和以及系统对传输能力的要求不断提高,难以满足系统对于卫星通信的需求. 同时,对于系统整体安全防护性能而言,微波链路因天线波束发散使得星间信号容易被干扰,难以保证信息的可靠传输. 为解决以上问题,近年来,导航卫星激光星间链路的研究引起业界的广泛关注[3-5]. 在安全性上,由于激光链路的发射能量集中,具有抗干扰、抗截获能力强的优势[6]. 在传输能力上,由于激光链路将光束作为载波传输,比微波频率高4~5个数量级,具有信息容量大,数据传输速率高的优势[7].
目前学界关于导航卫星星间链路的研究多集中在微波时分体制的星间链路[8-10],关于激光星间链路的研究较少,且全部为整网激光星间链路网络条件下的研究. 文献[11]根据激光星间链路的技术特点,综合卫星平台、轨道动力学、激光捕获终端跟踪性能等工程约束条件,以网络时延和链路空间位置精度因子作为通信性能和高精度测量的量化指标,提出一种基于多目标模拟退火算法的改进算法,求解全局最优拓扑结构. 文献[12]在设定星间传输体制、链路参数、传输损耗等条件下,分别分析了三种链路在激光频段的性能.
星间链路从微波频段宽波束体制到窄波束体制,进而发展到激光链路的过程中,微波-激光混合网络是导航卫星星间链路网络可能经过的一个重要发展阶段. 基于激光星间链路,将数颗关键节点导航卫星互联,构建高速、安全的局部激光高速节点骨干网络,为不同轨道类型、不同功能的卫星以及扩展用户提供大容量、高速率、实时性和安全性的通信服务.在高速节点数量固定的条件下,综合几何可视性、星间距离和工程约束等约束条件, 以卫星网络接入节点到目的节点的平均端到端时延最小为优化目标,建立数学模型,提出一种基于最短路径算法的混合星间链路网络高速节点选取的改进算法,求解关键节点,构建局部激光高速节点骨干网络的最优拓扑结构.
1 局部激光高速节点骨干网络的数学模型
根据导航卫星系统对微波-激光混合网络高速通信的需求,综合考虑系统约束条件,从多个卫星节点对若干激光节点进行骨干节点择优,以实现从起始节点经由激光节点到目的节点传输时延最小化的目标,将激光节点选择问题转化为具体数学模型问题,建立模型如下
f…L→minZ.
(1)
式中:f为优化目标函数;L为混合网络链路拓扑矩阵;minZ为优化目标,即混合网络源节点到目的节点端到端时延最小.
1.1 优化目标
(2)
式中:G表示起始节点的集合;C表示目的节点的集合;M表示备选激光骨干节点的集合;g表示某一起始节点,g∈G;k表示某一目的节点,k∈C;i、j表示某一备选激光骨干节点,i、j∈M;wgi表示从起始节点g到激光骨干节点i的通信时延;xjk表示激光骨干节点j到目的节点k的通信时延;Fij表示激光骨干节点间的通信时延,i=j时,Fij=0;li∈{0,1}表示备选激光节点是否被选中,选中的取值为1,否则为0.
1.2 约束条件
(3)
(4)
vij∈{0,1},
(5)
E=[eij],i=1,2,3,…,M,j=1,2,3,…,M,
(6)
vij-eij≥0,∀i,j,
(7)

(8)
vij=vji,∀i,j.
(9)
式中:D表示激光骨干节点数的最大值;V表示星间链路可视矩阵,包括链路终端约束Alaser和卫星轨道约束Aorb;αLmin、αLmax分别表示链路终端最小、最大俯仰角;βLmin、βLmax分别表示链路终端最小、最大方位角;αE为在地球遮挡下双星建链的最大可视角.
E为激光链路拓扑矩阵,eij∈{0,1}表示时段内备选激光节点i与j之间是否建链,建链的取值为1,否则为0.
式(3)为星间链路可视性约束,表示链路建链需同时满足几何约束和终端约束;式(4)为可视性矩阵约束,能够连续建链取值为1,不可连续建链时取值为0;式(5)为可达性约束,表示传输的节点间必须可达;式(6)为激光链路建链约束,表示卫星节点之间是否可建立激光键路;式(7)为建链约束,表示满足可视性才能建链;式(8)为单颗星携带链路数量约束,表示最多可建立链路数目;式(9)为可视矩阵的对称性约束,表示建链的条件是双向可视.
2 混合星间链路网络高速节点选取算法
由优化目标式可知,求解微波-激光混合网络模型的关键在于,在已知高速节点数n的前提下,确定激光高速关键节点在卫星网络中的分布,从而实现端到端时延最小的优化目标.
2.1 多源最短路径算法
多源最短路径算法[13]是一种利用动态规划的思想寻找给定的加权图中多源点之间最短路径的算法,其主要思想是通过不断松弛求解最短路径. 若以图中的点代表城市,边代表相邻城市间的道路,边长代表道路的长度,则使用多源最短路径算法可以找出到任意城市之间路径最短的城市. 在卫星网络中,通信时延就相当于城市间的道路长度,因此可以用图中边的长度表示相邻两个节点间的通信时延,然后采用多源最短路径算法找出到任意卫星节点间最短的关键节点. 算法流程如图1所示.

图1 多源最短路径算法流程
2.2 混合网络通信时延的计算方法
为了使多源最短路径算法能够适用于微波-激光混合星间链路卫星网络,关键在于对混合网络的时延特点进行分析.
在间歇性连通的微波时分体制卫星星间链路网络中,两颗卫星之间的通信时延一般包括了处理时延、传输时延、传播时延和排队时延[14],可表示为:
T=Td+Tw+Tt+Tp.
(10)
在激光网络中,处理时延Td由波长路由器件的响应速度来决定,只与处理器性能相关,目前的处理时延为毫秒量级[15].
传播时延Tp与卫星几何可见性有关,由星间距离d除以光速c得到
Tp=d/c.
(11)
传输时延Tt指的是发送信号所需要的时间,取决于数据长度L和通信速率R.
Tt=L/R.
(12)
由于激光的通信速率高达10 Gbit/s的量级[16],激光星间链路的传输时延可以忽略.
排队时延Tw是数据包在卫星内部排队等待的时延,在微波时分体制的卫星网络中,相邻节点只有在建链的时隙才有机会传输数据,且每次建链能够发送的数据有限,而在激光网络中,由于采用波长路由技术[17],网络中传输信息的激光信号可以近乎无时间阻滞地传输.
综上所述,在微波-激光星间链路混合网络中,需要考虑的时延主要是传播时延、微波节点间的排队时延以及微波节点间的传输时延. 由于传播时延与使用微波链路传输还是使用激光链路传输无关,所以对于混合网络来说,优化问题简化为,如何选取激光关键节点使得整网微波节点间的排队时延和传输时延最小.
2.3 基于多源最短路径算法的混合星间链路网络高速节点选取算法
为了使整网微波节点间的排队时延和传输时延最小,数据传输路径要尽量多地通过激光节点传输,对此,提出一种基于多源最短路径算法的混合星间链路网络高速节点选取算法.其具体步骤为:
1) 任选一源节点和目的节点,读取当前路径时延矩阵D,默认此时矩阵存储的时延为最短时延,不可见的卫星节点默认为∞,矩阵对角线为0;
2) 从第1个节点到第n个节点依次加入图中,每个节点的加入进行试探是否有路径时延被改变;
3)判断时延是否因为加入的节点而发生最短时延变化,如果发生改变,更新最短时延;
状态转移方程如下:
dp[i][j]= min(dp[i][j],dp[i][k]+
dp[k][j])
(13)
重复步骤2)和3)直到计算出最短端到端时延.
4)记录此时的传输路径,将经过的节点标记为激光节点.
5)重复步骤1),统计激光节点标记次数,选取使整网平均端到端时延最短的高速关键节点.
对多源最短路径算法主要进行两点改进:
1) 对节点进行分类,构造不同节点集:除了源节点G和目的节点C外,将剩下所有节点放入节点集合S,再对集合S进行分类,生成两个节点集合S1和S2,S1由所有激光节点组成,S2由所有微波节点组成;
2) 计算源节点G和目的节点C与S2中节点所构成路径的端到端时延,取源节点G、目的节点C和S2中节点所组成路径中时延最短的,将S2中对应节点加入到S1中.
将S分为S1和S2进行处理的目的是可以使算法更灵活,不断更新备选激光节点集合S1,以使得所选节点符合降低端到端时延的要求.
3 性能分析
使用STK导航仿真软件,搭建仿真场景,以5 min为仿真步长,仿真得到周期为24 h的卫星轨道数据.通过MATLAB编程实现关键节点选取算法,并对星间链路建链进行仿真,最后对算法的运行结果进行分析.
3.1 仿真场景
选择北斗卫星导航系统(BDS)为仿真场景进行算法仿真分析,其中包括中圆地球轨道(MEO)卫星24颗,采用标准型Walker 24/3/2星座,卫星轨道高度为21 528 km,轨道倾角为55°;地球同步轨道(GEO)卫星3颗,轨道高度35 786 km;倾斜地球同步轨道(IGSO)卫星3颗,卫星轨道高度为35 786 km,轨道倾角为55°,相位间隔120°.
卫星平台及微波和激光终端相关参数如表1所示.
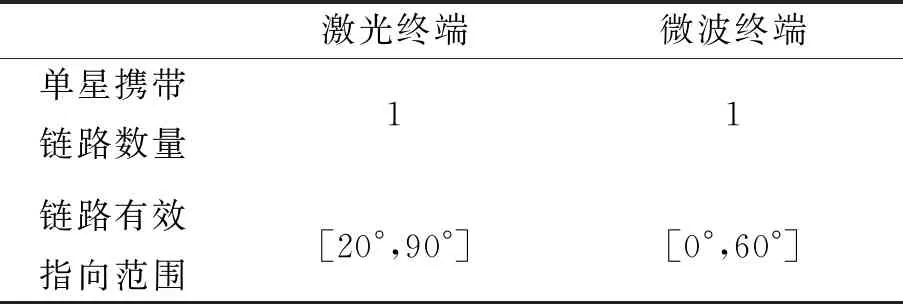
表1 卫星平台及微波和激光终端参数
3.2 仿真结果
对BDS整网30颗星进行仿真,仿真时长为一个周期168 h. 在激光关键节点选取中,端到端传输时延越小,说明该方法选中的节点更优.对本文方法、随机选取高速节点、基于链路状态算法的高速节点选取方法进行激光关键节点优化选取实验.图2记录了三种方法在同一时刻,任意选取的源节点和目的节点间的端到端时延,可以看出本文的优化设计方法的最大端到端时延均小于其他两种节点选取方法,且任一源节点到目的节点的端到端时延方差较小,说明节点选取更为均衡.
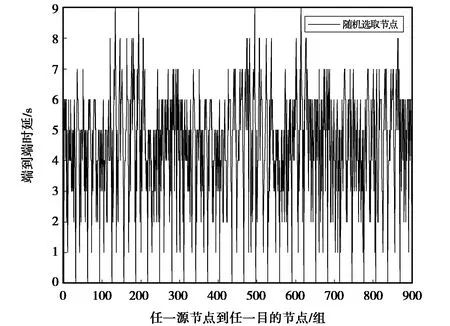
(a)随机选取节点仿真结果
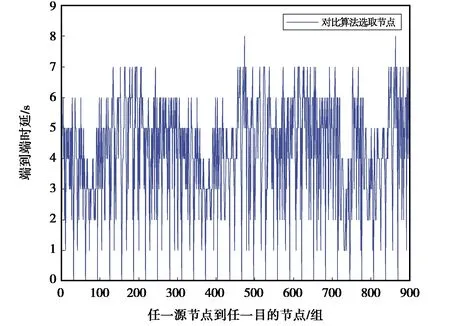
(b)对比算法选取节点仿真结果
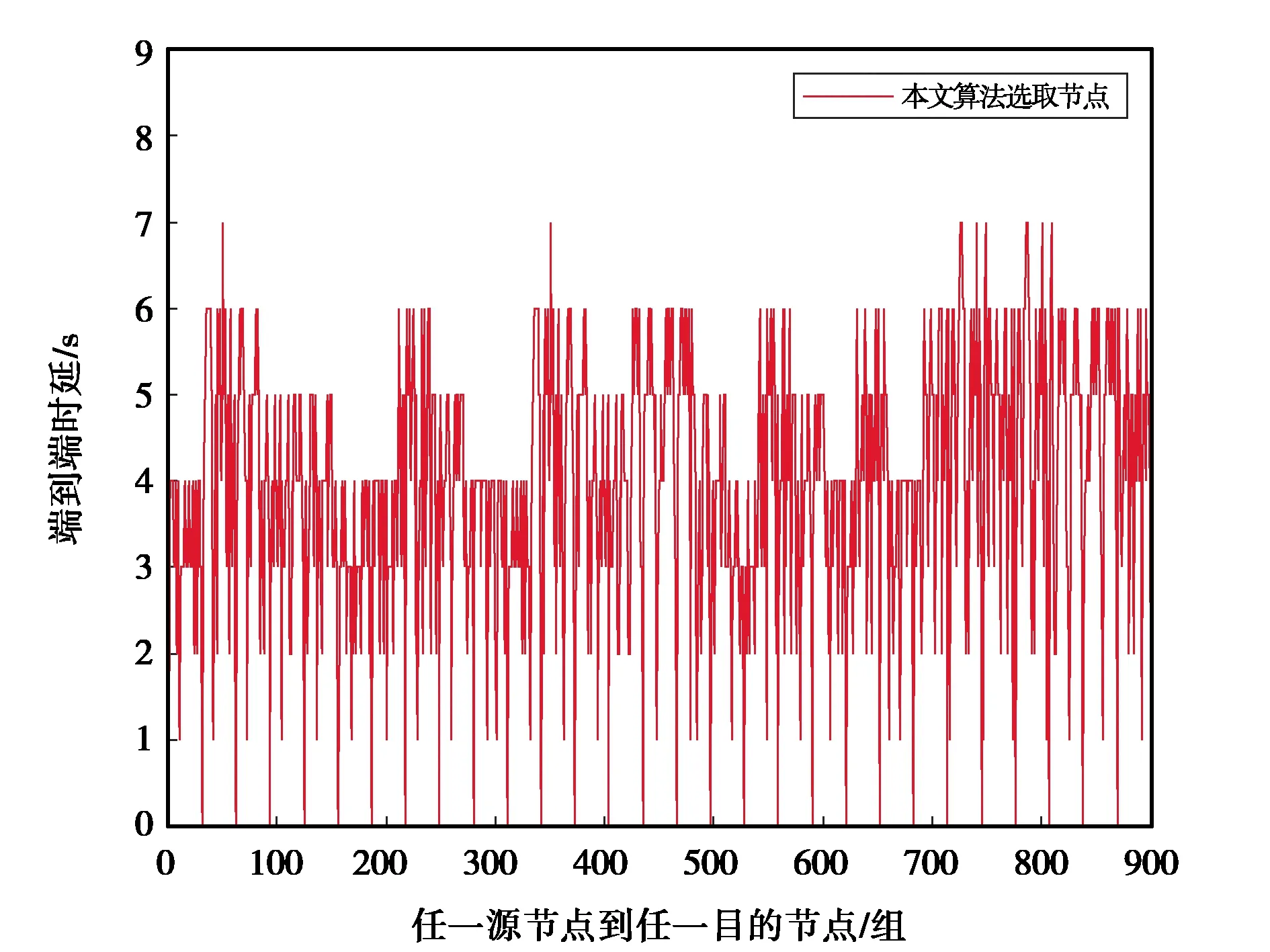
(c)本文算法选取节点仿真结果图2 同一时刻下,任一源节点到目的节点端到端时延
对整个卫星周期168 h进行整网平均时延的仿真,结果如图3所示,可以看出优化设计方法在通信性能方面体现出明显的优势:整网理想链路平均时延比随机选取高速节点减少了17.12%,比基于链路状态算法的高速节点选取方法减少了10.10%,实验结果表明,本文方法选取的混合网络激光高速节点更优,同时,在一个仿真周期内平均时延更小,说明该方法选取的节点使得整网性能更好.
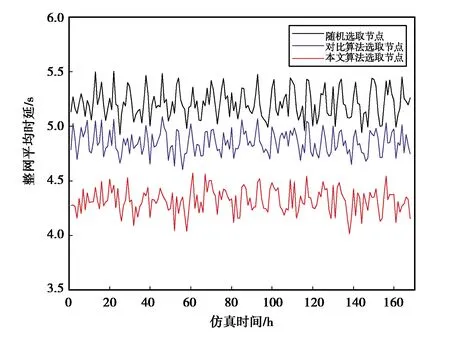
图3 一个星座周期内整网平均传输时延
4 结束语
提出一种基于多源最短路径策略的混合星间链路网络高速节点选取算法,从数学分析的角度出发,对微波-激光星间链路混合网络进行建模,分析混合网络的通信时延计算方法,实现高速关键节点的选取. 解决了全球卫星导航系统发展过程中可能经历的微波-激光混合星间链路网络的激光节点选取问题. 实验结果表明,本文方法选取的最优激光关键节点,可以使得整网平均时延更小,通信性能更佳.
猜你喜欢
火力与指挥控制(2022年8期)2022-09-16
雷达学报(2022年1期)2022-03-05
移动通信(2021年5期)2021-10-25
电脑知识与技术(2021年22期)2021-09-14
电脑知识与技术(2021年22期)2021-09-14
现代信息科技(2021年21期)2021-05-07
花火B(2019年3期)2019-04-27
红领巾·探索(2018年12期)2018-01-26
美食堂(2017年8期)2017-08-14
科技创新导报(2016年27期)2017-03-14