
多功能综合射频技术在地面无人战车上的应用
2021-01-21 14:53:40杜自成
火控雷达技术 2020年4期
刘 闯 杜自成 王 伟
(1.西安电子工程研究所 西安 710100; 2.陆军装甲兵学院 北京 100072)
0 引言
地面无人车最早被用于危险环境下代替人执行扫雷排爆、核生化处置、核爆取样等高危任务[1],随着技术的发展,其逐步被用于执行边境巡逻、警戒监视、情报侦察、火力引导、战场救援、保障运输等作战任务,受到世界各国的广泛重视[2-7]。
地面无人车用于战场侦察,具有侦察能力强、隐蔽性好、机动灵活、可长时间工作、可避免人员伤亡等优点,正在逐步替代有人驾驶侦察车,成为各军事强国陆军主要侦察车辆。无人侦察车通常装配有可见光、红外、激光等光电传感器[6][8],可以对作战环境进行成像侦察。随着无人侦察车在战场上的应用和技术的发展,对其提出了更多的要求,例如火力引导功能、低空目标探测功能、复杂战场环境下的工作能力、电子对抗能力等,因此对其上的任务传感器也提出了更高的要求。由于可见光、红外、激光等光电传感器的在浓雾天气和扬尘及浓烟的战环境下工作性能下降严重,且大空域多目标搜索与跟踪能力不足,因此在无人侦察车上加装毫米波雷达,用于改善复杂气象条件和战场环境下的侦察能力以及多目标搜索与跟踪能力成为一种趋势。例如,美国陆军未来战斗系统中的ARV-R无人侦察车可以独立或在人员遥控下执行侦察、监视、巡逻、搜索、火力引导、目标指示及毁伤评估等多种任务,其侦察设备包括被安装在一个5m高的可伸缩桅杆上的可见光、红外、激光等光电传感器组件,多功能Ka波段雷达及核生化传感器[3][6]。
本文针对无人侦察车对侦察探测传感器的需求,结合无人侦察车的发展趋势,提出在可见光、红外、激光等光电传感器基础上增加毫米波段的雷达探测、敌我识别、电子告警、高精度无源探测、电子干扰功能的侦察探测方案,重点是提出了一种适用于无人战车平台的实现雷达目标探测、敌我识别、电子告警、高精度无源探测、电子干扰功能的轻小型、多功能、一体化的综合射频架构。
1 无人战车用多功能综合射频系统架构
无人侦察车用多功能综合射频系统需要实现对地面运动车辆和低空飞机搜索和跟踪、敌我识别询问和应答、毫米波告警和干扰等功能,考虑工作频段、空域覆盖、极化方式等因素,将雷达探测、敌我识别询问、毫米波侦测与干扰综合设计,将3mm/8mm告警综合设计,将敌我识别询问和应答的信息处理综合设计,整个系统进行一体化集成。具体综合构架如下图1所示。

图1 无人车侦察引导用多功能综合射频系统综合架构
雷达探测、敌我识别询问、8mm干扰都需要使用定向波束工作,并且波束调度方式相同,因此可以共用一个8mm定向天线;考虑干扰需要对天线全极化的要求,将定向天线极化方式选为斜极化;雷达探测、敌我识别询问、毫米波干扰射频前端综合设计,收发信道复用;雷达探测和毫米波干扰通过软件动态加载或模块化动态配置共用一个信息处理板;敌我识别询问和敌我识别应答共用一个敌我识别综合信息处理单元。
3mm和8mm告警天线在结构上进行一体化设计,接收前端综合,接收信道复用,告警信号处理单元共用。毫米波告警需要一个全向天线,并要求能够进行辐射源测向,因此采用一个8阵元的全向阵列天线;告警所需接收通道较多,为了降低成本,辐射源接收采用检波接收的技术方案。
敌我识别应答虽然也使用全向天线,但不宜与3mm/8mm告警共用全向阵列天线,因为敌我识别应答如果使用全向阵列天线,则需要多个超外差接收通道,会大大增加系统成本,且敌我识别应答和毫米波告警都需要全时工作,接收通道不能复用。因此将敌我识别应答前端独立设计,单独使用一个全向天线和超外差接收通道,而将信息处理与敌我识别询问进行综合设计,共用一个敌我识别信息处理单元。
雷达探测、敌我识别询问和毫米波干扰综合模块与毫米波告警模块及敌我识别应答前端在结构上进行集成,整个系统时序和资源进行统一的管控和调度。
2 无人战车用多功能综合射频系统关键问题分析
1)基于任务优先级及优先级动态可调整策略的多任务调度技术
多功能综合射频系统要实现雷达探测、敌我识别、全向告警、高精度被动侦测和定向干扰等多种功能,其中雷达探测、敌我识别询问、高精度被动侦测和电子干扰共用定向综合孔径天线、射频前端、信号与信息处理单元等硬件资源,因此如何对系统资源进行合理的管理和调度,避免资源使用冲突,是实现多种功能的关键。
系统通常的工作过程有以下几种情况:
①第一种情况:全向告警处于被动接收状态,当侦收到威胁辐射源信号时,引导定向孔径天线对辐射源进行测频和精测向,并实施干扰。在整个工作过程中,没有触发雷达探测和敌我识别询问任务。在这种情况下,系统时分工作,不存在资源竞争的矛盾,只需要做好任务协调和管理即可。
②第二种情况:雷达开机进行目标探测,当发现目标时,插入敌我识别询问时隙,对目标敌我属性进行识别。在整个过程中,没有触发被动侦测和干扰任务。在这种情况下,系统时分工作,不存在资源竞争的矛盾,只需要做好任务协调和管理即可。
③第三种情况:在整个系统工作过程中,出现需要同时进行雷达探测、敌我识别询问、被动侦测及电子干扰的命令,此时会出现系统资源竞争的矛盾,可采用任务优先级调度的方法来解决该问题,任务优先级设置具体情况为:
目标搜索任务优先级最低,敌我识别询问优先级较高,火控跟踪和电子干扰的任务优先级最高。若在进行火控跟踪时发起电子干扰任务,则火控跟踪任务不能被打断,必须保证火力打击任务的执行,此时不响应电子干扰任务;若在进行电子干扰时发起火控跟踪任务,则说明正在对威胁目标实施干扰,来保证平台自身安全,因此电子干扰任务不能被打断,此时不响应火控跟踪任务。整个任务调度基于任务优先级策略进行,并结合实际战术任务可动态调整。任务优先级设置与动态调整策略如图2所示。

图2 任务优先级设置示意图
2)系统电磁互扰抑制技术
多功能综合射频系统的毫米波告警工作频段为Ka波段,雷达探测、敌我识别询问、电子干扰的工作频段也在Ka波段,完全包含在告警工作频段内,告警模块全向、全时工作,且与雷达探测、敌我识别询问、电子干扰综合模块在结构上进行一体化设计,因此在定向孔径天线向外发射信号时,告警模块有可能会受到该发射信号的干扰。
雷达对告警系统的电磁干扰途径有电磁泄露和近端强目标反射回波,能够影响告警系统工作的情况包括将告警系统烧毁或饱和两种。烧毁是必须避免的,饱和会影响告警系统的正常工作,原则上来说,这两种情况都应该避免。
根据系统设计指标,告警前端不会被烧坏或饱和的条件如下:
不烧坏条件:进入告警前端的连续波功率不超过20dBm;
不饱和条件:进入告警前端的功率不超过不超过-40dBm。
①电磁泄露耦合分析
雷达与告警天线上下安装,在雷达发射期间测量进入告警天线的耦合信号功率,测量发现,耦合进告警天线的信号主要来自与雷达天线同一方向安装的4个8mm阵元,其它8mm阵元和3mm阵元收到的耦合信号很小,可以不考虑。根据测量,耦合信号功率最大为-22dBm,因此不会导致告警前端烧毁,但是会饱和。
为了解决该问题,在雷达天线和与其同一方向的4个告警天线阵元之间加装隔离条,加大两者之间的隔离度。经测试,加装隔离条后,可以将耦合信号减小到-42dBm左右,可以避免告警前端被饱和。
②近端强目标反射回波对告警系统的影响分析
假设雷达发射功率为75dBm,近端强目标RCS=100m2,最近强目标距离为100m,告警天线增益8dB,等效天线接收面积为4.5e-5m2,根据式(1)可以计算不同距离强目标回波进入告警接收机的功率大小,结果如图3所示。
(1)
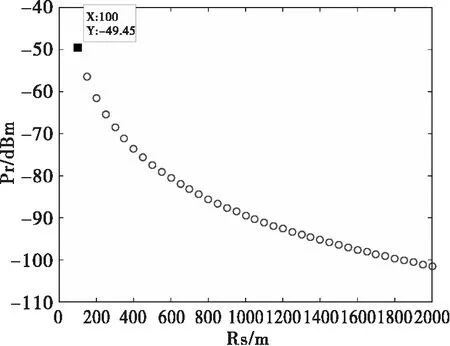
图3 不同距离进入告警接收机的目标回波功率
其中,Pr为进入告警接收机的信号功率,Pet为雷达等效辐射功率,σt为目标等效截面积,Ae为告警天线等效面积,R为目标距告警天线的距离。
由计算结果可以看出,在100m处,RCS为100m2的目标回波进入告警接收机的功率为-49.5dBm,不会导致告警接收机的饱和。因此近距目标回波问题不用考虑。
3 结束语
本文针对无人车战场侦察、火力引导、平台防护的应用需求,提出将综合射频技术用于具有雷达目标搜索与跟踪、敌我识别、高精度无源探测、电子干扰、全向告警等功能的多功能综合射频系统的设计,提出了一种适用于无人战车的多功能射频系统综合架构,并对涉及的多任务管理与调度、系统电磁互扰与抑制问题进行了详细分析。该多功能射频系统综合架构已用于某型无人战车侦察引导系统的样机研制,并完成了各项功能及技术指标的试验验证,在无人车平台上进行了集成测试。结果表明,该多功能
射频系统综合架构在实现多种功能的同时,可有效减小系统的体积、重量、功耗和成本,能够很好地满足无人战车平台的装车要求,技术先进、可行,对后续相似系统的研制具有很好的借鉴意义。
猜你喜欢
现代雷达(2023年11期)2024-01-05 15:01:52
轻兵器(2022年10期)2022-10-22 03:05:26
小哥白尼(军事科学)(2019年2期)2019-04-17 02:17:28
小哥白尼·趣味科学画报(2019年12期)2019-02-28 11:55:02
成都信息工程大学学报(2018年5期)2018-12-06 09:23:52
测控技术(2018年3期)2018-11-25 09:45:52
北京航空航天大学学报(2017年12期)2017-04-23 08:31:51
岷峨诗稿(2017年4期)2017-04-20 06:26:43
新高考(英语进阶)(2017年12期)2017-02-26 11:37:34
现代兵器(2016年6期)2016-06-25 16:20:24
