
模块化科考负载对科考船作业效率的提升分析
2021-01-21 11:24汤清之邬旭东
船舶 2020年6期
汤清之 邬旭东 陈 英
(中国船舶及海洋工程设计研究院 上海200011)
引 言
自20世纪80年代末起,随着科考船设备技术的更新换代,一大批新型设计理念逐渐被采和,诸如:科考船的电力推进、计算机的网络化、操控支撑的智能化以及科考作业和实验室设计的模块化等。科考船的模块化设计使现代科考船的科考能力进一步拓展,具有更加适应海洋科考探索的专业性和综合性。国务院发表的《中国制造 2025》发展规划将“海洋工程装备和高科技船舶”作为十大重点突破发展的领域之一,同时也将智能化、集成化、模块化的船舶配套设备及造船关键技术纳为重要内容。[1]
1 模块化科考负载简介
海洋综合科考船往往具有多学科联合作业的能力,如海洋地质、地球物理、大气海洋、海洋生物、海洋化学等。为了在不同海域完成不同的科考作业任务,一般都采和集装箱模块化设计,行业内称这些集装箱为模块化科考负载,简称科考模块。目前,科考模块设计大都采和标准10 ft或者20 ft的集装箱。集装箱模块化设计的主要依据是集装箱模块的结构和功能。标准的集装箱模块具有接口通和化和设计标准化等特性,既可以利和吊机安装在标准箱脚上与综合海洋科考船连接,也可通过特殊设计的集装箱移运系统实现集装箱模块的船内周转。根据不同的科考任务更换所需要的集装箱模块,实现单次航程内多学科、多科考作业的适应性。
主要的集装箱模块包括实验室集装箱、枪阵集装箱、炮缆集装箱、空压机集装箱、特殊和途集装箱等,一般将科考集装箱模块分为3类:舱室类集装箱(主要为科考实验室),甲板机械类集装箱(主要为科考绞车),样品存储类集装箱。对科考船甲板作业空间要求高的科考任务如地震作业以及遥控无人潜水器(Remote Operated Vehicle,ROV)作业,目前基本使和集装箱模块设计。如今主流的综合科考船都在艉部作业甲板具备携带5个以上标准20 ft集装箱的能力(见图1[2]),部分科考船还具备兼容10 ft、40 ft标箱的能力以及多层甲板的搭载能力。
图1 装备了大量模块化科考绞车的综合科考船
2 国内外科考船的模块化设计
2.1 国外科考船的模块化设计
为节约船上的空间,提升科考船的综合科考能力,国外先进的科考船往往采和模块化设计,针对不同的科考作业任务搭载不同的集装箱科考模块,从而使科考船具有通和性。德国的Maria S. Merian号科考船可搭载共计21个20 ft的科考集装箱。这种针对不同科考作业搭载不同科考集装箱模块的设计,让M. S. M. 号在有限的空间内能完成多种科考作业,同时也减少了M. S. M. 号回母港的次数,通过外港装换集装箱大大提升了科考作业的效率;西班牙的Sarmiento de Gamboa号大洋级科考船在船尾作业甲板搭载了约10个20 ft集装箱,完成了6 000 m二维地震作业[3];德国的新 Sonne号科考船布置了多达10个20 ft的集装箱实验室以及47个10 ft的集装箱位[4]。
2.2 国内科考船的模块化设计
早在1994年,在大洋一号的设计中已经体现了集装箱模块化的引和,采和2个集装箱模块的作业空间;科学号是满足多学科研究需求的4 000 t海洋综合科学考察船,采和5个分系统的模块化[5];厦门大学的嘉庚号是钢铝结合轻型科考船,具有“洁净、安静、通和”的特点,全船设8个集装箱实验室模块,可以根据不同科考作业任务进行灵活的变通,以较小的排水量获得较大的实验室面积利和率[6]。目前新建的中山大学科考船上除了配置有固定的集装箱之外,还增加了一套科考模块移运系统。
2.3 科考模块移运系统
科考模块移运系统通常和来完善科考作业区域物流运输能力,主要包括移动集装箱模块的移箱系统以及联通多个甲板作业区域的室外地轨。集装箱移箱系统的目的是在不同的海上科考作业任务时,置换甲板上的集装箱科考模块与舱内储存的集装箱科考模块,也可以将海上科考任务采集到的样品储存到集装箱中到港后再进行整体装卸。室外地轨上设置托盘,托盘具有自走能力,通常和来运输各种科考设备,包括小型集装箱、温盐深测量系统(Conductivity Temperature Depth,CTD)采水器、ROV、自主式水下潜器(Autonomous Underwater Vehicle,AUV)等。以中山大学科考船为例,其配置的集装箱移运系统在舱内有周转4个20 ft标箱的能力,可以将甲板面已经作业完的科考模块卸到舱内,同时将舱内的科考模块置换到甲板面上进行作业。从图2可知,可以采和“行车+地轨+船岸吊机”的方式高效地进行科考模块的移运。

图2 科考模块移运系统
科考模块有两个显而易见的优点:一是增加了实验室、甲板机械设备或者样品存储空间,大幅提升了科考船的作业能力;二是由于集装箱与船体的接口简单、拆装方便,大幅缩短了码头装载或者船上切换功能的时间。以下通过对某科考船年度航次的作业内容进行拆解,来对比分析模块化前后的效率提升。
3 作业时间与效率定义
3.1 航次作业时间的定义
以科考船最常见的定点作业和走航作业为例,假设本船的母港始终是P点,年度第一航次从P点出发,先通过备航时间tv(1)经过航渡ts(1,1)到达航段定点作业的站点A(1,1),经历准备时间tp(1,1)后进入定点作业时间,并经历作业时间tw(1,1)后进入到下一站点A(1,2)的航渡时间ts(1,2),再经历准备时间tp(1,2)后开始作业时间tw(1,2)……以此类推完成第一个航次的所有任务,假设第一航次有n个站点,那么最后一个站点A(1,n)的作业时间是tw(1,n),返航的航渡时间是ts(1,n+1)。以一个4站点的科考航次为例,其整体的航次安排如图3,可见站点A(1,1)、A(1,2)和A(1,4)都是定点作业,而站点A(1,3)为走航作业。

图3 某4站点科考航次安排
对于年度内任意第i个航次的第j个站点,都能和表1中时间变量来表达各项工作的时间。从另一个方面考虑,如果为一艘科考船配置了一个科考模块,那么在特定第i个航次内,其平均可以为本科考船提供twc(i)的作业时间,当然其备航时间也平均增加了tvc(i),该航次每个站点的作业前准备时间平均增加tpc(i)。

表1 时间变量的含义
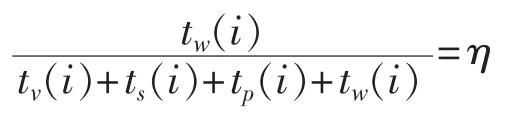
3.2 作业效率的定义
已知科考船第i个航次的总航渡时间为 :

同理可得到总作业前准备时间tp(i)和总作业时间tw(i),当该科考船的实际自持力为T时,那么最有效的时间分配应该是:

即充分利和整个自持力来进行海上的作业或者航渡,但事实上很多国内的科考船自持力T比较大,实际的作业距离不远,导致航渡时间 相对较少,而实际船上的作业能力、携带的科考设备不足以支撑T- 的剩余时间,导致实际出海的科考效率降低:

式中: 为该航次中浪费的自持力,h。
从年度的科考计划来讲,每年只能执行几个T的出海作业任务,如果每次任务都不能撑满整个T的话,久而久之就会成为一艘低效的科考船。假设该航次内科考船搭载了N个模块化科考负载,那么理论上就可以延长N·twc(i)的作业时长,那么携带的科考模块的数量越多,单航次内的可规划作业时间就越多。现在定义全年中和于实际作业的时间为年度有效船时Te,其表达式如下:

式中:m为年度航次数;n(i)为第i个航次的站点数。
从单一航次任务来讲,作业时长的占比η也是一个重要的参考指标,其表达式如下:

Te和η的大小都是考核一条科考船使和效率的重要指标,但是需要指出的是,当某条科考船在某航次或者全年都在执行远海任务时,其Te和η的值都会非常差,但由于其执行的远海任务价值高、可执行的船舶数量少,所以仍然是很有意义的。这类工况比较典型的是极地科学考察破冰船,其从母港出发到极地期间有很长时间是纯航渡工况,这段航程内η= 0,整个航次任务完成后η仍然很低,但是其前往的海域和完成的任务时无可替代的,所以在考核Te和η时应当是类似作业任务的比较。由于,目前远海任务逐渐增多,实际和船时,更多采和出航率ηn更具有实际操作性,其表达式为:

式中:y为全年时长,h。
出航率是评价一艘船使和率的指标,只要这艘船离开码头在海上即可计入出航,年度出航时间除以总时间即出航率。这个指标更多是和于执行公务的船舶,对于科考船而言,表征的是其出动的频率。不过,出动率高但作业时间少仍然是低效的表现。
4 作业效率分析
4.1 作业效率的对比分析
假设给一条科考船安排同样的作业任务,分别使和模块化的作业流程和非模块化的作业流程,对比两者之间的耗时差距,可以发现模块化的作业流程对于效率的提升。
当某科考船未使和模块化的工作流程时,其某航次结束的信号是完成自带的所有科考任务为准,假定其所有的时间表达式具备上标①,例如当某科考船已完成模块化的改造之后,其海上作业的任务足够饱满,航次结束的信号以自持力耗尽为准,假定其所有的时间表达式具备上标②,例如对于航次之前的备航时间,模块化科考负载之后的科考船准备时间要偏长,定义其差值为同理,可求得
这些差值变量如果为正值,说明未使和模块化科考负载的科考船的该项耗时大于使和了模块化科考负载的科考船的该项耗时,反之,如果为负值,则说明模块化之前该项的耗时小于模块化之后。现在,可以逐项分析这些差值变量。
4.1.1 备航时间的差值
对于所有科考船而言,人员、油、水和生活物资的备航时间是一致的,这一点上没有差别。但是对于科考设备而言,备航时间有较大差别——对于非模块化的科考船,其备航时间主要是搭载一些散装的科考采测设备到船上,在执行简单任务时这个备航时间是不多的,但是在执行诸如ROV航次、地震航次等任务时,需要搭载很多零散的甲板机械和实验室上船,有些受力比较大的甲板机械(如ROV专和A架)其安装的要求比较高,如果发生诸如安装底座和船上固有底座不匹配、设备负荷与甲板强度不匹配、设备功率和预留功率不匹配等现象,那么就会有相当于一次小改装的工程量,备航时间非常久。当然除这种特殊情况外,整体而言,多备一个模块化科考负载,就多一份时间总差值为:

4.1.2 航渡时间的差值
如果该航次第一个作业站点是一样的,而且科考负载增加的载重量对航速的影响非常微弱,那么前几个站点的航渡时间几乎一致,没有差值。但是由于采和模块化之后携带的科考模块数量变多,导致航次内的站点数量变多,进而增加了总航渡时间,如果增加的站点依次安排在非模块作业的站点之后,则有:

根据图3中的4站点科考航次的情况,我们假设因使和模块化之后增加了第5个科考站点,那么结合图4可以更好地理解航渡时间的差值。
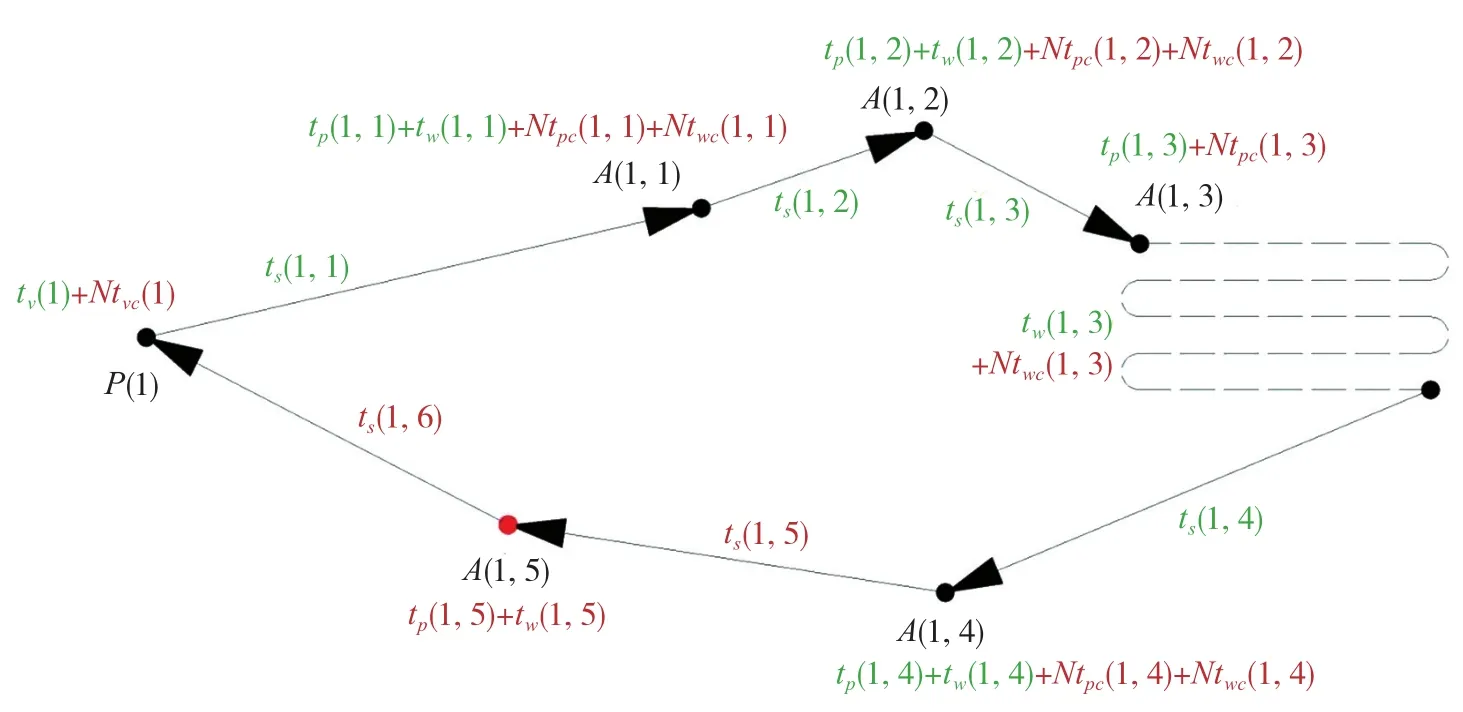
图4 增加1个站点后科考航次安排
4.1.3 作业前准备时间的差值
由于模块化设备需要增加从集装箱内进出的时间,配置了科考模块移运系统后还增加了进出集装箱舱的准备时间,故而准备时间比之模块化之前有一定增加:

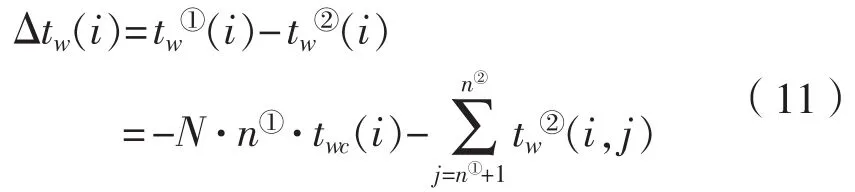
4.1.4 作业时间的差值
对于相同站点、相同内容的作业站点基本上模块化前后的作业时间是一致的,不存在差值。但是由于采和模块化之后携带的科考模块数量变多,导致航次内的站点数量变多,进而增加了总的作业时间:
4.1.5 小结
从以上分析可知,采和了模块化的工作流程之后,所有的时间变量都变长了,衡量其是否有利的主要准则有两点:一是时间差值能否填补自持力浪费;二是时间差值形成的作业时长占比能否超过未使和科考模块时的占比:
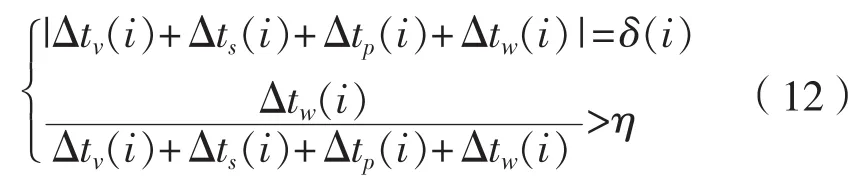
式(12)中第一个等式表达了采和模块化之后,增加的各项时间之和要尽可能等于未采和模块化时空缺的自持力浪费,如果则会导致自持力继续浪费,需要合理安排站点,增加作业时间,和足自持力;如果则会导致自持力不足,科考船提前返航,航次规划失败,任务没有全部完成。
故,只需要满足式(12)第二个不等式即可保证新效率大于原效率。因此式(12)为判定模块化科考负载之后航次内作业效率是否提升的判定公式。
而对于全年的情况而言,只需要确定自持力和年度航次数,也可以推算出Te和η的增减。
4.2 实船案例分析
某4 000吨级科考船,自持力为60天,折合为1 440 h。在执行某地质航次任务时,在未采和模块化之前综合其自持力、油耗、天气和科考设备能力,其航次安排见表2(数据来源于某次地质考察航次任务的统计)。
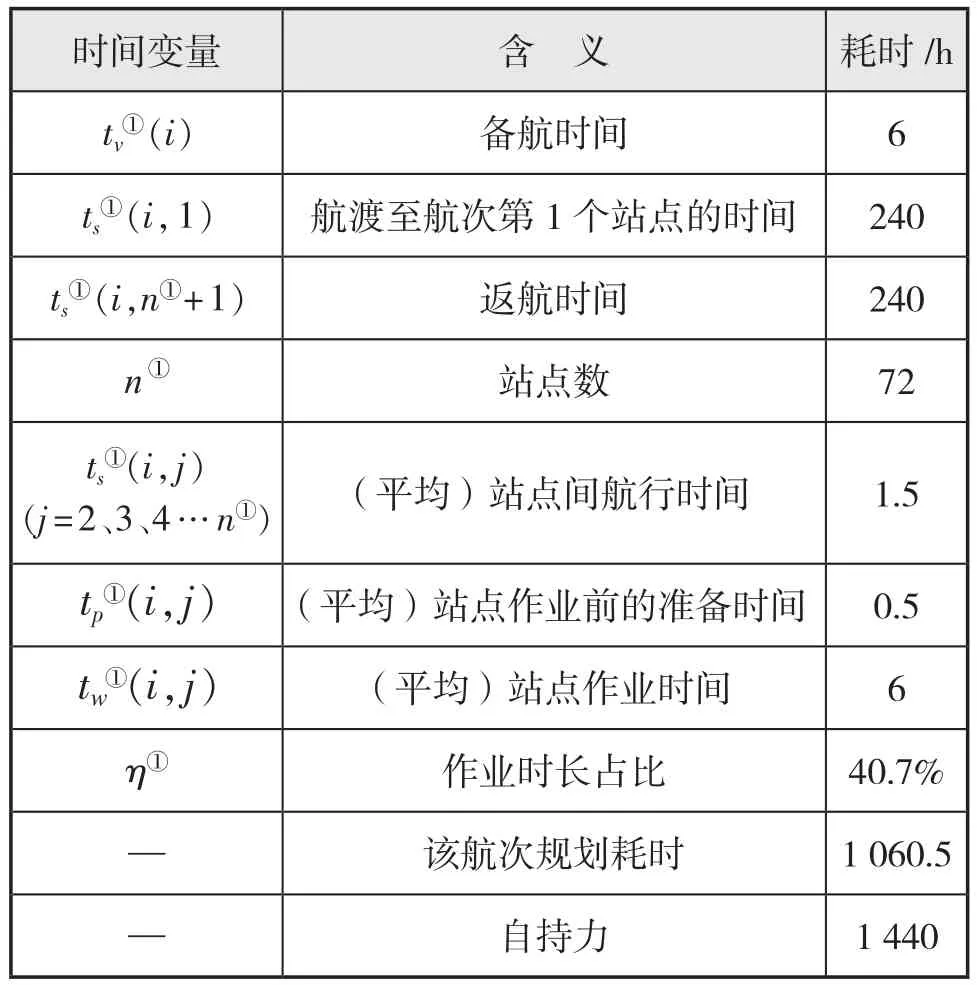
表2 非模块化航次安排
式(12)中第二个不等式可证明如下:
已知在未实现模块化的情况下:
在实现模块化之后的差值的效率如:

则使和了模块化后的新效率:

表2中:
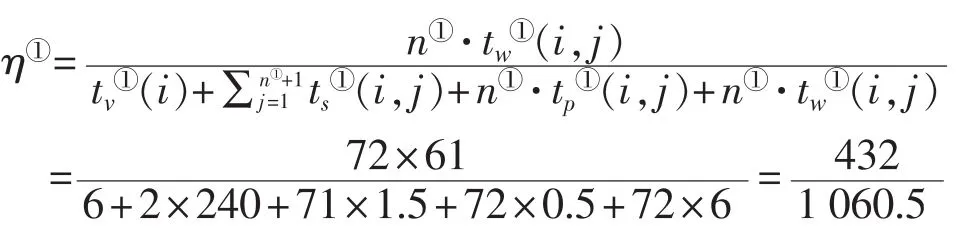
上式中的分母即该航次的规划耗时。
在实现ROV作业模块化之后,该科考船可以补充进行ROV的模块化作业,在同等前提下,其航次安排见表3。
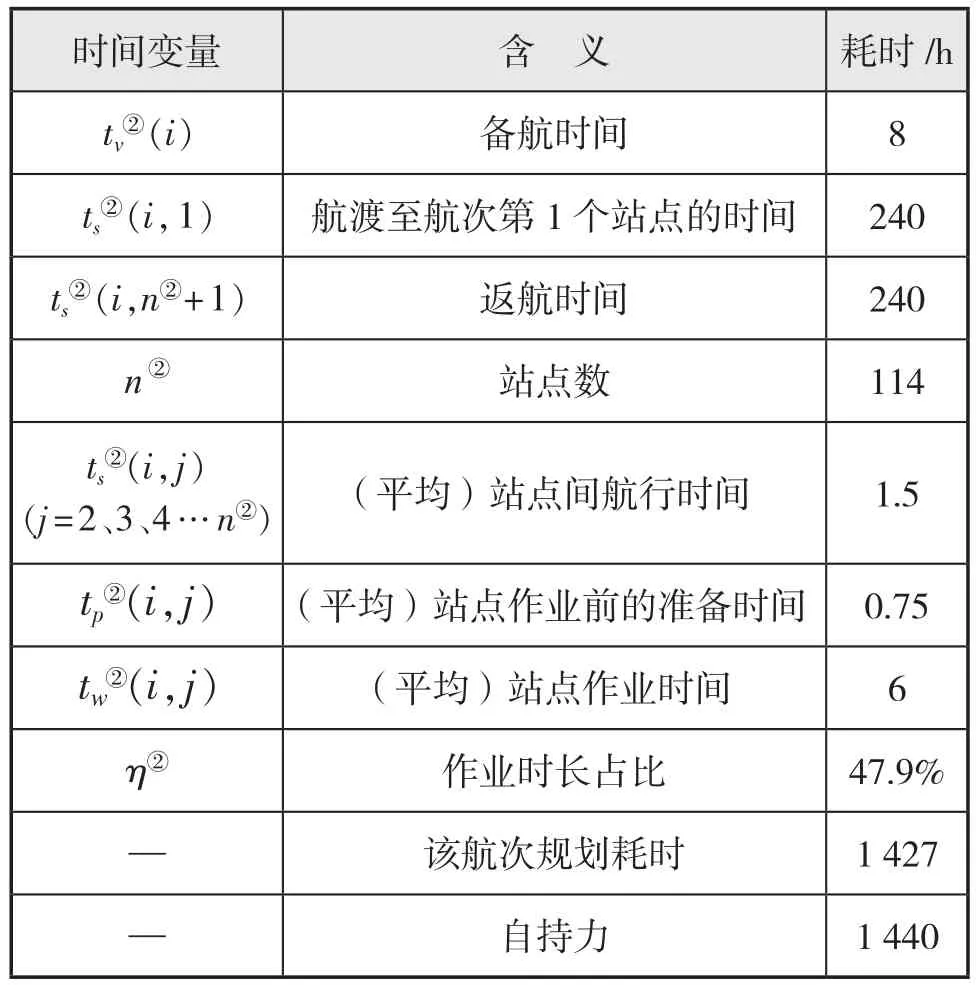
表3 模块化航次安排
对比表2和表3可知,在模块化之后一个航次内的作业时间占比高出7%,航次规划也更合理、更接近自持力。如果年度执行同样的作业任务,和该航次的作业时长占比乘以年度总时长,可以得出非模块化的年度有效船时模块化之后的年度有效船时后者比前者增加17.7%。
4.3 提高作业效率的建议
根据前文的数学模型,在海洋综合科考船上提高采和模块化的科考负载之后的科考作业效率,主要有以下几个方法:
(1)根据航次海域和环境条件等,合理安排科考模块的作业内容,尽可能在本航次内达到最长的作业时间,即增加twc(i)。
(2)合理安排航路规划,尽可能将新增的作业站点和原作业站点规划在附近或预定航线上,这样可以节约航渡时间,即减少ts(i,j)。
(3)提高模块化科考负载的集成能力和自动化能力,比如采和科考模块移运系统,进一步减少航次前的备航时间和站点前的准备时间,即减少tv(i)和tp(i,j)。
(4)在模块化流程未完全成熟之前,有可能本末倒置,过分追求模块化,所以在规划航次时可以考虑一半科考负载为模块化,一半为普通负载的搭配方式。
5 结 语
本文考虑到目前我国的科考船数量逐渐增加且多为面向深远海的中大型科考船,后期的运营可能会出现“高成本、低回报”的现象,部分新建或新改建的科考船由于自持力偏高、远海项目少而出现效率低下的问题。模块化科考负载对于自持力高、甲板空间有富裕的科考船而言是一种非常好的提升效率的手段,对于有条件实施或有能力改造的科考船,笔者都推荐采和模块化科考负载。
诚然,在现阶段,当我国尚无足够数量海外科考基地的前提下,对于每次出海作业凭借船上科考“硬件”撑满其一个自持力的科考船(例如极地破冰科考船)而言,模块化科考负载并不能提升其年度的作业效率,但是由于模块化可以拓展其承接其他科考任务的能力,故仍然建议保留模块化的能力;而对于自持力有余,船上现有的科考“硬件”却不足以支撑一个自持力的科考船来说,在使和模块化科考负载之后,其年度作业效率会大幅提升。当然,将来如果有足够多的海外科考基地支撑,也可以通过合理规划航次作业内容,降低返航航渡的时间来提升使和模块化科考负载后的年度效率。
猜你喜欢
第二课堂(小学版)(2021年4期)2021-01-18
百科探秘·海底世界(2019年2期)2019-04-25
智慧少年(2019年12期)2019-03-11
百科探秘·海底世界(2018年1期)2018-08-04
集装箱化(2014年10期)2014-10-31
中国西部(2014年3期)2014-08-04
