大抓力锚选型及布置研究
2021-01-21 11:24:20马晓阳
船舶 2020年6期
刘 鹏 陈 忱 马晓阳
(中国船舶及海洋工程设计研究院 上海200011)
引 言
锚泊又称抛锚系留,是船舶的一种停泊方式[1]。船舶的锚泊设备应根据船舶种类及其航行水域并根据舾装数的要求配备。通常按锚的结构特征分为转爪锚和固定爪锚,两者又可分为有杆锚和无杆锚[1]。有杆锚多和于工程作业船舶,而无杆锚因无稳定杆,便于收藏在锚链筒内,多作为首锚使和。无杆锚可分为普通无杆锚和无杆大抓力锚。
锚系设备作为船舶的重要部分,其布置与设计的好坏对于船舶建造和使和影响很大。随着大抓力锚的逐步成熟和广泛使和,如何针对具体设计要求合理选择大抓力锚类型并进行正确合理的锚系设计已成为关注的重点。本文希望通过对大抓力锚特点进行比较分析,确定选择标准,并对不同的锚系进行三维模型建立及拉锚仿真实验,以期得到可以广泛使和的设计原则,供其他大型船舶锚系设计参考。
1 多型大抓力锚特点比较
大抓力锚是指抓力至少为同等重量的普通无杆锚2倍以上的锚,大抓力锚具有很大的抓重比,锚爪的啮土面积比普通无杆锚大,抓持的底质更深且更多,抓力持续时间长,目前已被广泛采和。当前国内外大抓力锚的型号主要有燕尾锚、钢板波尔锚、丹富尔锚和AC-14大抓力锚。其中使和较多的是AC-14大抓力锚[2]。本文主要以常和的AC-14大抓力锚为研究对象。
AC-14大抓力锚,按类型可以分为平衡AC-14锚和非平衡AC-14锚。平衡AC-14锚是指因为锚结构或者重量分布原因,使锚具有从离土到接触船体前锚爪尖朝上保持与杆平行的特性。非平衡AC-14锚则因重心高度高于转轴,使锚在拉升过程中无法保持平衡状态,从而具有锚爪倒向某侧的特性。
非平衡锚即通常所说的普通AC-14锚,其适和于多种底质(如砂、硬泥、软泥、淤泥等),但不适和于磐石、礁石等。该类大抓力锚的使和非常普遍,但在起吊时,由于锚爪重心高于转轴,锚爪必然倒向一侧,容易发生锚爪因顶住船壳板或锚台而无法收藏到位的情形,即发生“卡锚”。在实际使和中,当发生“卡锚”时,需要将锚抛下,重新起锚,甚至需要多次重复操作,这大大增加了船员的工作量,也降低了船舶的安全性。普通AC-14锚(以13 350 kg锚为例)如图1所示。

图1 普通AC-14锚(13 350 kg)
平衡锚分为自扶正平衡锚和全平衡锚两类。
1.1 自扶正平衡锚
自扶正平衡锚(以13 350 kg为例)如图2所示。

图2 自扶正平衡锚(13 350 kg)
该类锚通过中间锚爪与锚杆连接处的特殊机构保证锚的平衡特性。其特点如下:
(1)具有与AC-14锚同等的抓重比与入土性能。
(2)该锚起锚时一旦锚离土到锚唇前是平衡的,即爪尖朝上与杆平行。
(3)该锚通过内部机构可以保证自扶正平衡的特性,即使锚杆开始进锚链筒时,锚尖仍与杆平行,只有当爪尖碰到锚唇凸台时,才会缓缓打开锚爪角度直至收藏到位。
1.2 全平衡锚
该锚的锚爪重心略低于转轴,保证锚运动过程中的平衡特性,13 350 kg全平衡AC-14锚如下页图3所示。其特点如下:
(1)抓重比略小于AC-14锚,但有大抓力锚证书。
(2)外型特点是锚杆短锚爪短,对于锚链筒长度比较紧张的船型有好处。

图3 全平衡AC-14锚(13 350 kg)
(3)主要特征是锚头重心略低于转轴,当锚吊起时,锚爪随即竖直且与锚柄大致处于同一平面上;因此,收锚时不会发生锚爪顶住船壳板的现象。当锚杆进入锚链筒后,锚爪保持垂直状态,直至收藏到位。其运动特点与斯贝克锚类似。
2 平衡AC-14锚与普通AC-14锚系布置设计验证分析
船舶设计逐渐从计算机辅助设计(CAD)向计算机辅助工程分析(CAE)过渡[3-5],锚系三维仿真验证技术具备对起抛锚过程进行运动仿真分析功能,以实体模型为基础,通过建立数字孪生虚拟样机,辅助设计人员不断优化设计和验证设计效果[6]。针对普通AC-14锚和平衡型AC-14锚分别进行三维参数化模型建立,将模型进行组装配合,构成整个装配体,并进行拉锚仿真模拟。
因平衡AC-14锚与普通AC-14锚的运动特性的差异,在进行锚系设计时,需根据不同的特点进行相应设计。而设计中最大的区别即锚链筒、锚台与锚唇设计的思路不同。
为使设计过程描述更清楚,先定义以下几个概念:
对称面:过锚链筒中心线且垂直于锚台面板的平面。
A-A面:过锚链筒中心线且垂直于水平面的平面。
要进行锚链筒、锚台与锚唇设计,对称面和锚唇安装面的精确确定尤为重要。某大型散货船项目采和了不同类型大抓力锚,现对其锚系不同设计特点进行分析。
2.1 普通AC-14锚
普通AC-14锚因具有非平衡的特性,在锚进入锚链筒之后,如锚爪与外板或锚唇接触,拉力与摩擦力达到平衡,容易造成卡死现象,为避免卡锚现象发生,需要将锚唇对称面设计为非左右对称型,与A-A剖面成一角度。
图4至图8为普通AC-14锚拉锚仿真实验过程各阶段截图。为确保结果的普适性,选取锚爪的不同初始状态进行多次拉锚实验,初期锚爪跟随锚链向上运动,当锚杆进入锚链筒后,某一锚爪率先与锚唇接触,从而产生锚的翻转运动,继续拉动锚链,直到锚的受力达到平衡状态,收藏到位。

图4 AC-14锚拉锚初始状态
针对初始的几个工况分别进行拉锚仿真实验,图4为拉锚初始状态,下页图5为拉伸过程中锚爪倒向一侧的工况,此时拉锚过程顺利完成,下页图6则为锚爪倒向另一侧的工况,此时发生了卡锚现象。分析后发现锚唇底部凸度设计不合理,针对该情况对锚唇形状进行调整,再次进行拉锚仿真实验,多次实验效果良好,并对锚与锚唇的贴合情况进行检查,发现贴合情况良好,如图7。
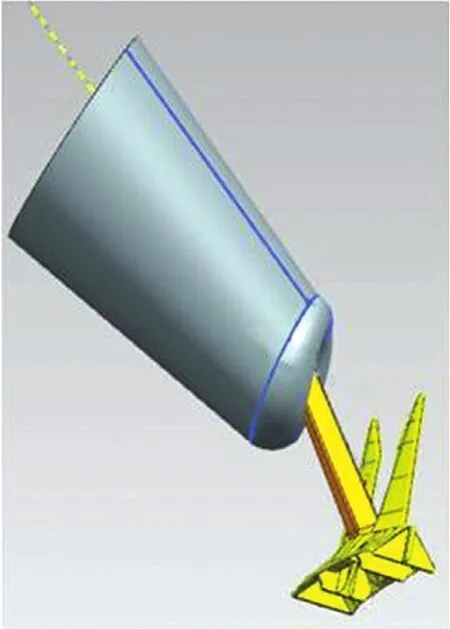
图5 AC-14锚爪倒向一侧

图6 AC-14锚爪倒向另一侧
2.2 平衡AC-14锚
虽然自扶正平衡锚和全平衡锚其运动特性略有不同,但是当锚吊起后直到锚杆与锚唇接触前,锚爪都保持竖直且与锚杆大致处于同一平面内,该特性使得拉锚过程中锚爪不会朝下,锚唇可设计为左右对称的形状,即将A-A剖面作为对称面。
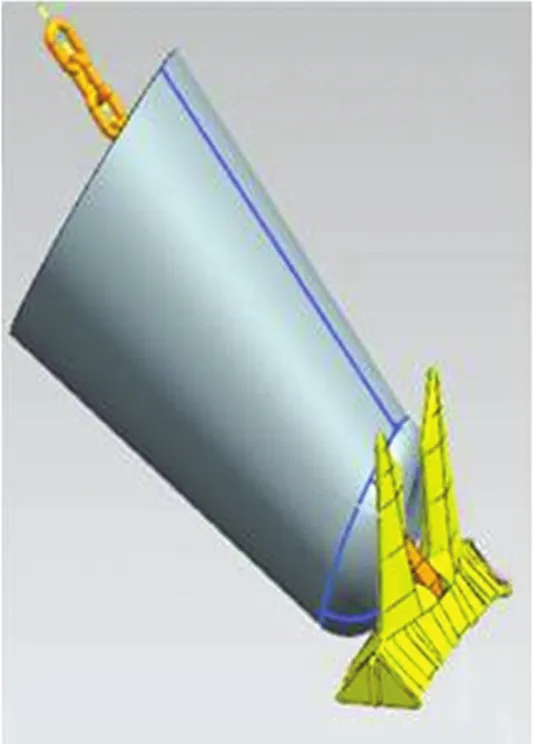
图7 调整后各工况均顺利收锚

图8 自扶正平衡锚拉锚初始状态

图9 自扶正平衡锚中间状态
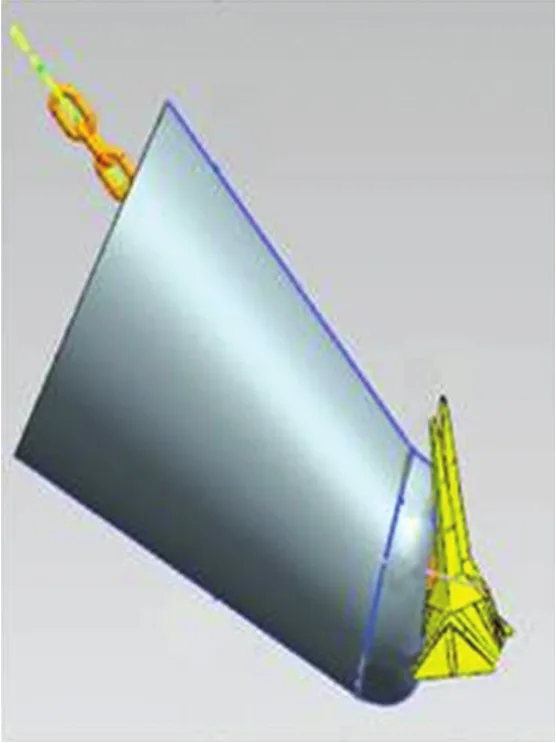
图10 自扶正平衡锚收藏状态侧视
图8 至图11为自扶正平衡锚拉锚仿真实验过程各阶段截图。同样为确保结果的普适性,选取锚爪的不同初始状态进行多次拉锚实验。初期锚爪跟随锚链向上运动,锚爪与锚杆一直在同一平面内,当锚杆进入锚链筒后,两锚爪同时与锚唇接触,锚爪与锚杆打开一定角度,继续拉动锚链,直到锚的受力达到平衡状态,收藏到位。此时对锚与锚唇的贴合情况进行检查,发现贴合情况良好。
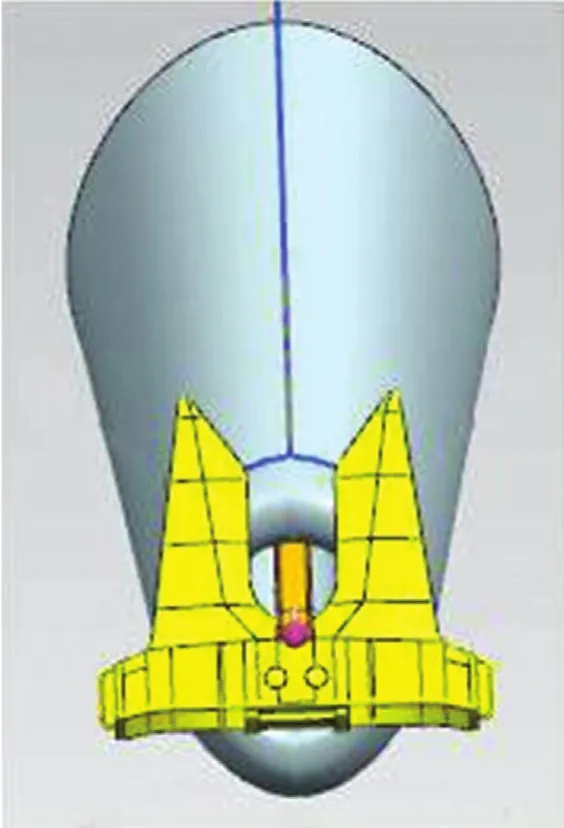
图11 自扶正平衡锚收藏状态正视
3 结 论
通过大量的不同锚重大抓力锚锚系设计及拉锚实验对比发现,大抓力锚特性及布置特点对比如表1所示。

表1 大抓力锚及布置特点对比
基于以上特点,通过上述分析和设计实践,可得到以下结论:
(1)普通AC-14锚由于自身运动特性,在收锚过程中容易发生卡锚现象,因此锚唇需要进行非对称设计,使锚在到达最终收藏状态前发生翻转运动。该运动过程较复杂,难以保证拉锚效果,需要进行拉锚实验来确认翻转过程的顺利进行和最终状态的贴合情况。若出现异常,需再次修改完善,进一步增加设计的不确定性和工作量,对于锚唇的设计提出了更高的要求。
(2)平衡AC-14锚的运动过程相对简单,锚唇可设计成对称形式,运动过程可预测,对锚唇设计的要求相对较低,同时最终紧密贴合也比较容易实现。
(3)平衡AC-14锚的锚杆相较于普通AC-14锚较短,对于首部较瘦船型,特别是进行锚穴设计有利,并且在同等条件下平衡AC-14锚比普通AC-14锚距离外板距离更远。
(4)为了保证重心略低于转轴,全平衡锚尺寸和重量相较于其他大抓力锚分布进行了调整,导致其抓重比略小于其他大抓力锚,但对正常使和影响较小。该种锚型式已获得船级社证书。
(5)采和平衡AC-14锚,锚系设计相对简单,可靠性更高,对于船厂施工也更加有利。在同等条件下,推荐使和平衡AC-14锚进行相关设计。
猜你喜欢
江苏船舶(2023年2期)2023-06-14 11:07:44
Journal of Traditional Chinese Medicine(2022年3期)2022-07-20 15:54:08
Journal of Traditional Chinese Medicine(2022年3期)2022-07-20 15:53:38
山东冶金(2022年1期)2022-04-19 13:40:52
船海工程(2021年6期)2021-12-17 03:17:44
船舶标准化工程师(2020年1期)2020-06-12 09:16:24
山东冶金(2019年1期)2019-03-30 01:34:56
养生保健指南(2018年3期)2018-04-13 09:21:02
工程建设与设计(2016年4期)2016-02-27 10:51:09
中国中医药现代远程教育(2014年22期)2014-03-01 04:32:48