嵌入式海底管线检测系统设计与实现*
2021-01-19 11:01:48周文涛马国军
计算机与数字工程 2020年12期
周文涛 马国军,2 丁 安 王 彪,2
(1.江苏科技大学电子信息学院 镇江 212003)(2.镇江市智慧海洋信息感知与传输重点实验室 镇江 212003)
1 引言
由于电力、石油和天然气等能源运输的需求,近年来在海底建设了越来越多的水下基础设施,如电缆和管道,以满足输送油气和通信的需求。海底管线经过海水的长时间浸泡和腐蚀,或者受海底地壳运动的影响,极易发生破损或断裂,从而造成巨大的经济损失和环境污染。为了保持这些基础设施的安全和可靠,必须对管线进行定期检测和维护。
自主式水下机器人(Autonomous Underwater Vehicle,AUV)相较于遥控潜水器(Remotely Operated Vehicle,ROV)进行管线检测具有低成本、灵活方便的特点,并逐步获得应用[1~2]。在文献[3]的管道检测中,AUV通过相机获取水下管道线图像并进行小波图像增强、基于熵的管道图像分割,根据视觉反馈对腐蚀管道检查和跟踪,从而控制AUV的航向。文献[4]研究单目视觉的水下管线检测与跟踪技术,但光学成像受海水浑浊度影响,探测距离有限。
由于声纳探测可以不受水体浑浊度的影响且探测距离远,常作为AUV配置的设备进行海底管线探测。文献[5~6]利用的合成孔径声纳具有较高的分辨率但成本也较高。
文献[7]根据合成孔径声纳图像中水下目标的特征,提出Radon变换和Grab Cut的管线提取算法。从声纳图像中提取管线,需要先设定阈值将目标从背景中分离[8],然后对分割出的目标Hough变换[9~10]提取直线。文献[11]利用纹理信息,采用神经网络和支持向量机进行边缘分类的方法检测线状目标。
平均恒虚警率的方法最先用在雷达信号目标检测中,文献[12~13]引入该思想,自适应地产生分割阈值,对侧扫声纳图像目标分割,有效地完成管线检测。
本文研究海底管线检测声纳图像的嵌入式软硬件设计,利用侧扫声纳得到海底声图,开发声纳图像管线检测新方法。
2 管线检测嵌入式硬件设计
为了在海底检查任务中以较低成本获得较高质量的数据,AUV配置的常用传感器有DVL(Doppler Velocity Logs)、GPS、视觉相机和侧扫声纳,IMU(Inertial Measurement Unit)和压力传感器等[14~15],以完成系统控制、信息感知和管线检测等任务。
本文设计的海底管线声纳图像嵌入式检测系统包括核心CPU Samsung Cortex-A8 S5PV210芯片、存储器、通信接口和LCD显示接口等。S5PV210芯片具有低成本、低功耗和高性能的特点,是三星公司推出的一款适用于智能应用的多媒体设备处理器,主频800MHz。本文采用的嵌入式系统配置512M DDR2内存,4G EMMC FLASH;LCD显示采用7英寸高清液晶显示电容触摸屏,分辨率为1024*600。
嵌入式检测系统整体硬件框图如图1所示,电源部分提供3.3V和5V电压,通过GPS获取AUV位置信息和DVL传感器获取AUV姿态,侧扫声纳得到的海底声学图像通过LCD显示。
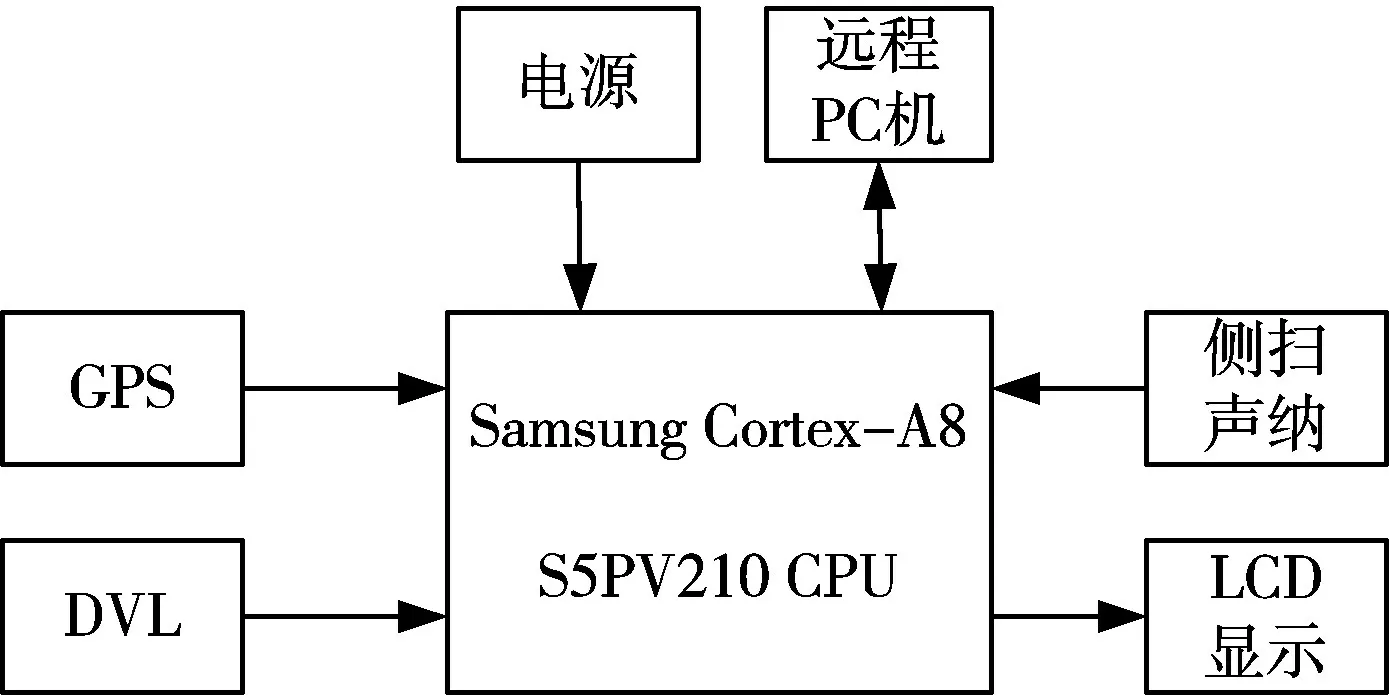
图1 管线检测系统硬件结构
3 管线目标分割
3.1 声纳图像预处理
声纳图像中含有各种噪声,从而造成图像模糊。为去除噪声和改善图像质量,通过高斯滤波算法去除图像中的噪声,以提高管线目标分割的精度和准确率。
二维高斯滤波:

其中,x、y为图像像素坐标,σ为高斯滤波器的标准差,该滤波器在各个方向上的平滑程度相同,可以用来去除噪声,平滑图像。
3.2 二维平均恒虚警率方法
根据声纳和管线目标位置的相对方向,声亮区域会有较大的变化。同时,海洋环境中各种噪声的存在,使得声纳图像模糊不清,造成目标不清晰。当声亮区域的某些像素点灰度值小于检测阈值时,易造成目标的错误分割,从而目标在声图像中不可见。
本文借用雷达信号处理中的恒虚警率(Contant False Alarm Rate,CFAR)思想,研究声纳图像管线检测的二维平均恒虚警率方法。在目标检测和图像分割时无需图像的先验知识,而且具有较强的抗干扰能力,在对声纳回波功率进行采样时,目标区域具有较强的回波,而背景或目标背后的阴影区域部分的回波则较弱。恒虚警率算法通过自适应的调整检测阈值以保持恒虚警概率,该检测阈值由测试单元周围像素功率的平均值决定。
二维单元平均恒虚警率[13](Cell Average-Constant False Alarm Rate,CA-CFAR)的滑动检测窗口如图2所示,设x i,j为测试单元像素,浅灰色为保护单元像素,参考单元像素为黑色。G为保护单元宽度,N为参考单元宽度,则滑动检测窗口内像素总数为[2(N+G)+1]2;同理可得,保护单元内像素总数为(2G+1)2。

图2 滑动检测窗口
参考单元内像素灰度平均值R a,滑动检测窗口内像素灰度累加值Sumw,保护单元内像素灰度累加值Sum g,则参考单元内像素灰度平均值为(Sumw-Sum g)/R c。
在高斯混响情况下,任意单元的概率密度函数(probablity density function,pdf)只与声混响功率β2的平均值有关。设图像中测试单元像素xi,j,其周围有R c个参考单元y l,l=1,2,…R c,R c为参考单元的数目。假设y l独立同分布,则参考单元混响功率的平均值为

其联合概率密度函数为

声学混响功率的最大似然估计通过计算β2的最大值得到

此时,为参考单元平均值,检测阈值T̂与参考单元均值成正比,其系数为α,则

在虚警概率条件下,混响功率变化时,检测阈值也发生变化。虚警概率P fa和T̂均为随机变量。
令zl=αy l/R c则其概率密度函数为

的概率密度函数为

其数学期望为

式(8)表明,P fa只与R c有关,即与N和G有关,可得比例系数:

将式(9)代入式(5)即可求出阈值T̂。
CA-CFAR算法的检测阈值受P fa、N和G的影响。P fa的值决定了影响阈值大小的比例系数α,N和G的值决定参考单元和保护单元总数,并影响参考单元内灰度平均值的计算。
3.3二维CA-CFAR算法
二维CA-CFAR算法通过测试单元周围的参考单元灰度平均值来确定检测阈值。当检测窗口移动时,参考单元的平均值也随之改变,因而是一种自适应的阈值检测算法。
3.3.1 区域像素快速求和
为得到参考单元内像素灰度平均值,需要首先计算参考单元内所有像素灰度值之和。
对每一个测试单元xi,j,阈值T需要计算其参考单元内所有像素之和,即

如果采用直接计算的方式,将耗费大量的时间,从而无法在嵌入式系统上实现。因此,本文利用积分图像的数据结构快速计算区域内像素的累加和。
积分图像为当前像素点P(i,j)左上角所有像素灰度值之和,用Integralf(i,j)表示,则

采用递归的方式计算积分图像时,只需按式(12)对图像进行一次扫描,直到图像右下角时结束。

其中,s(i,j)表示当前位置像素P(i,j)行方向的累加和。
滑动检测窗口W内所有像素之和可以利用积分图像实现快速计算,

3.3.2 CA-CFAR算法实现
通过以上分析,利用积分图像的二维CA-CFAR算法步骤如下:
Step1:初始化参数N,G,P fa;
Step2:利用积分图像的数据结构,计算原图像的Inte gralf(i,j);
Step3:计算滑动检测窗口内像素灰度累加值SumW,保护单元内像素灰度累加值SumG,则参考单元内像素灰度均值为(S umW-SumG)/R c和利用式(9)计算比例系数α;
Step4:根据式(5)计算检测阈值T;
Step5:根据阈值T将图像二值化,若f(i,j)≥T,则该点判断为目标,否则,为背景。
3.4 管线边缘提取及直线检测
3.4.1 Canny边缘检测
边缘是图像中灰度变化最剧烈的地方,在声纳图像中,管线边缘检测就是在去除图像中不相干的细节的同时,保留目标的边缘信息。常用的边缘检测算子有Canny、Sobel、Roberts和Prewitt等。
边缘检测要求尽可能地标记实际边缘,不丢失重要的边缘,出现虚假边缘的概率最小;同时,检测到的边缘位置与实际位置一一对应,噪声尽可能不产生边缘。本文根据管线声纳图像的特点,采用canny边缘检测算子。
Canny边缘检测包括图像去噪、梯度计算、非极大值抑制和滞后阈值四个步骤。
1)图像去噪
将图像f(x,y)与高斯函数做卷积,以平滑图像,去除图像中的噪声,防止噪声引起的伪边缘。
2)梯度计算
计算图像梯度,得到可能的边缘。图像f(x,y)在x,y方向的梯度分别为f x和f y,则梯度模G m和梯度方向G a分别为

3)非极大值抑制
图像边缘存在于梯度模极大值处,非极大值抑制是将局部范围梯度方向上灰度变化最大的保留下来,而局部极大值之外的所有梯度值抑制为0。
4)滞后阈值
为进一步去除由于噪声引起的小梯度值即伪边缘,利用高低双阈值的方法,来保留真正的边缘。
3.4.2 Hough变换检测直线
Hough变换可以用来检测直线或曲线,具有鲁棒性,且对噪声不敏感。直线检测就是确定图像中可能的直线上的所有像素。
采用Hough变换检测直线时,利用极坐标的形式可以提升直线检测的有效性。图像中,参数化直线方程为

其中,(x,y)为直线上一点的直角坐标,θ为该点到原点的直线与x轴的夹角,ρ为该点到原点的距离,如图3所示。该式将图像空间中的每一个点(x,y)映射到参数空间中的一条曲线。在直角坐标系中,同一直线上的点相交于极坐标系中的同一点(ρ,θ),该点可以通过投票机制来确定[10]。

图3 极坐标图
4 嵌入式界面设计
在嵌入式系统的界面中,图像显示分成两个区域,分别显示原始的声纳图像和管线提取后的图像;参数区域显示检测到的管线的参数指标,包括管线坐标和走向。在触摸屏上点击管线上的某一点,可以显示该点位置的直角坐标(x,y)和极坐标(ρ,θ)以及管线的走向。功能选择区域为用户提供操作接口,包括打开、保存、管线检测、帮助和退出等功能。
综上所述,二维CA-CFAR海底声纳管线检测流程如图4所示。

图4 二维CA-CFAR管线检测流程
5 实验结果
实验中,所用计算机CPU为Intel Core i5 8300H,8G内存,采用C++编程语言。本嵌入式系统界面设计采用Qt4.5开源版,操作系统为Ubuntu 12.10。
二维CA-CFAR中,参数取值为N=5,G=3,P fa=0.32,检测结果如图5所示。

图5 侧扫声纳图像管线检测
其中,图5(a)为侧扫声纳获取的海底管线图像,(b)为采用CA-CFAR检测管线后的结果,(c)为Canny边缘检测和Hough变换后的结果,(d)为对检测出的管线进行拟合的结果。
所设计的具体界面如图6所示。
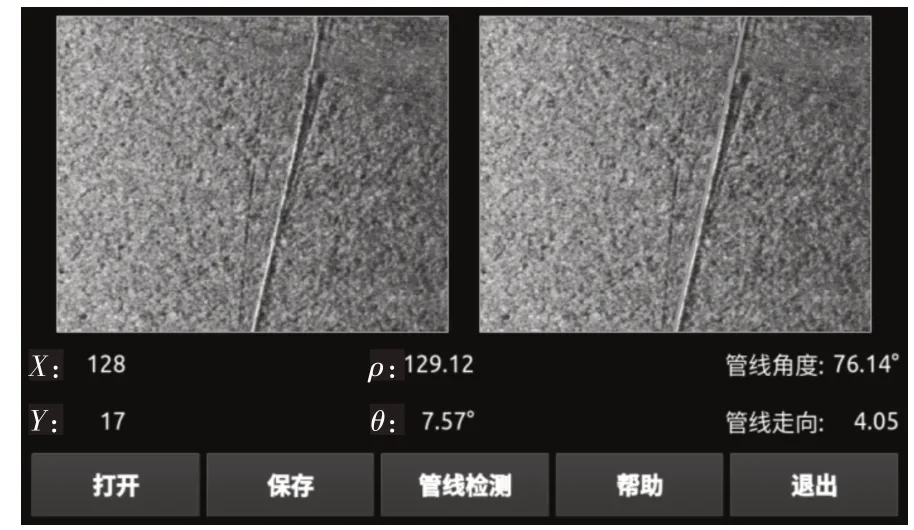
图6 显示界面
6 结语
本文研究了侧扫声纳海底图像中管线的检测方法,并设计嵌入式软硬件系统。所设计的硬件部分包括电源、GPS和DVL传感器、LCD显示、通信接口及侧扫声纳。对海底管线声纳图像采用二维CA-CFAR算法,利用滑动检测窗口自适应的调整检测阈值,然后采用Canny边缘检测算子和Hough变换提取管线,并进行管线拟合。实验结果表明,该嵌入式海底管线检测系统能够有效检测出声纳图像中的管线。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
高技术通讯(2021年3期)2021-06-09 06:57:48
考试与评价·八年级版(2020年5期)2020-10-29 05:42:35
装备制造技术(2020年12期)2020-05-22 09:24:54
电子测试(2018年14期)2018-09-26 06:04:12
铁道通信信号(2018年2期)2018-04-18 12:18:23
自动化学报(2017年5期)2017-05-14 06:20:56
电镀与环保(2016年3期)2017-01-20 08:15:32
光学精密工程(2016年1期)2016-11-07 09:01:59
火控雷达技术(2016年2期)2016-02-06 02:29:03