
分布式光纤测温系统的降噪研究 ①
2021-01-15 03:27刘文杰郭来功朱敬宾王锦鹏
佳木斯大学学报(自然科学版) 2021年1期
刘文杰, 郭来功,*, 朱敬宾, 王锦鹏
(1.安徽理工大学电气与信息工程学院,安徽 淮南 232000; 2.中化地质矿山总局地质研究院,北京 100101)
0 引 言
在油井、输气管道等场合下,要对其环境温度进行实时监测,调整好管理措施,减少甚至杜绝意外的出现。而在某些强电磁干扰、易燃易爆的环境中,传统传感器的适应性就显得捉襟见肘。分布式光纤传感技术以光散射为基础,利用光时域反射(OTDR),可通过检测光强的变化完成检测温度场的空间分布状况,以光纤本身就能实现传和感,其本质防燃防爆,测量范围广,抗干扰性强,且具备多点实时性监测的能力。使用光纤传感技术对温度等物理量感知时,比较关键的一步就是对信号的采集和处理。散射光属于微弱信号,需要进行放大处理,由于其本身的范围波动、放大电路噪声和系统干扰的影响,感知的灵敏度和精确度会出现不同程度的偏差。因此,可以使用数字BOXCAR(取样积分器),对信号做多次采样积分,得到的结果再计算平均值,可以尽可能把脉冲信号还原成原本的波形[1],让系统的信噪比提升,使与信号交缠一起的噪声被抑制,实现更接近真实值的感知。
1 分布式光纤拉曼测温系统
1.1 测温及定位原理
目前,以三种背向散射光作为分布式光纤发展的理论基础:Rayleigh scattering,Raman scattering,Brillouin scattering。三者中,随温度变化而光强波动较大的就是拉曼散射光[2],所以在测温方面以分布式光纤拉曼传感系统(DTS)最为普遍。
光纤中的瑕疵会影响折射率的均匀性,光经过时,光子和光纤的光声子发生非弹性碰撞,即拉曼效应[3]。在散射光谱中,波长小于入射光的部分为反斯托克斯光(Anti-Stokes),波长大于入射光的部分为斯托克斯光(Stokes)。因为Anti-Stokes信号对温度的变化比较敏感,通常将其作为信号通道,而将Stokes信号作为参考通道[4]。任意温度T时,Anti-Stokes和Stokes的光通量比值为:
(1)
式中,ΦAS,ΦS是Anti-Stokes和Stokes在温度T时的光通量;KAS,KS是Anti-Stokes和Stokes的截面系数;vAS,vS是Anti-Stokes和Stokes光子的频率;αAS,αS是Anti-Stokes和Stokes在光纤中传输的损耗;L是散射光在光纤中的位置;RAS,RS是Anti-Stokes和Stokes的温度调制函数,关系式为:
RAS(T)=[exp(hΔv/kT)-1]-1
(2)
RS(T)=[1-exp(-hΔv/kT)]-1
(3)
式中,h是普朗克常量,其值为6.626×10-34J·s;Δv是光纤的光声子频率,其值为1.32×1013Hz;k是玻尔兹曼常量,其值为1.38×10-23J·K。将式(2)、式(3)代入到式(1)中,得到:
exp[(αS-αAS)·L]
(4)
对光纤做定标的措施,能知悉更接近实际的温度分布状况。在感温光缆前端取一段做定标光纤,可以避免雪崩二极管(APD)在前端进行光电转换时出现饱和阻塞现象,参考温度T0,则T0时Anti-Stokes和Stokes的光通量比值为:
exp[(αS-αAS)·L]
(5)
用式(4)除以式(5),最终可得:
(6)
从式(6)可获得温度T的值:
(7)
由式(7)得到最终解调的温度关系式,只要测得参考温度T0和采集到Anti-Stokes和Stokes两路光信号数据即可计算出被测温度T值。
利用OTDR原理可以对DTS测量点完成定位操作。光在通过光纤时,产生的背向瑞利散射会随着距离的增加而逐步衰减,部分散射光会以同样的方式回到原点,探测到从发出到返回的时间t,该点到光纤首端的位置l即为:
(8)
式中,c是真空中的光速,其值为3×108m/s;n是光纤的有效折射率。采用OTDR可以方便获得光纤沿线上各点的衰减状态,利用式(8)并结合Anti-Stokes信号的温敏特性,完成整条光纤各点位置的测温及定位。
1.2 系统结构
分布式光纤拉曼温度传感系统总体设计如图1所示。主要包括脉冲光源、波分复用器、感温光缆、光电探测模块、数据采集和上位机等部分。
其中,光源选择脉宽可调、工作波长为1550nm的脉冲激光器;因多模光纤中的拉曼散射光信号明显,光缆选用规格为62.5μm的多模光纤。由信号采集模块控制同步触发指令,激光器产生的脉冲光经WDM后再到光纤中,产生的背向散射光再次经过WDM分离出波长1450nm和1663nm的Anti-Stokes和Stokes光信号,经光电探测模块实现光电转换以及对电信号放大的过程,然后传送到数据采集模块进行高速A/D转换为数字信号,最终在上位机完成解调操作并接入交互界面,使各位置的温度值一目了然。
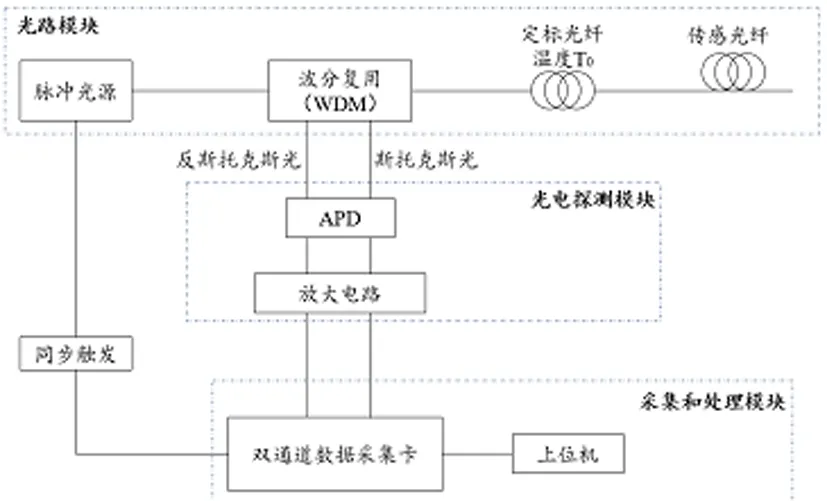
图1 DTS总体设计图
2 信号处理
2.1 基本原理
在DTS工作时,受各种因素的影响,想要获取的微弱背向散射光信号与噪声交叉在一起。因此,使用数字BOXCAR,对信号多次取样后执行积分操作,采集和积分同时进行,可以避免脉冲信号发生畸变,能够有效恢复窄脉冲波形,消去噪声,使信噪比得到优化。
结合分布式光纤传感系统和测温的原理,可知想要获取的有效信号是带有随机噪声的周期性信号,表达式为[5]:
f(t)=S(t)+N(t)
(9)
式中,f(t)为光电探测输出的信号,由于APD和放大器等部分存在的噪声,其为带噪声且周期为T的信号;S(t)即为理想状态下不含噪声的待测信号;N(t)即随机噪声,其大小与S(t)没有关系。
设U为进行了n次采样,经过BOXCAR后输出的信号:
(10)
对N(t)随机噪声来说,其噪声值在不同时间均不相关:
(11)
因此,有:
(12)
取样积分经过了两个过程:一是待处理信号要满足取样定理,即BOXCAR适用于周期信号的取样,而要处理的散射光信号正是由脉冲光源产生的连续周期性变化的信号;二是对取样信号的积分和平均,信号与噪声的表达式分别是:
(13)
(14)

(15)
输出信噪比为:
(16)
信噪比改善为:
(17)
由式(17)可知,散射光经BOXCAR处理后,信噪比改善的倍数与次数n的平方根存在正比关系:即次数n的增加,信噪比也随之优化,能够使噪声衰弱得更明显[6];但同时,随着次数的增多,测量时间也必然会越长。
2.2 数字BOXCAR
相较于模拟BOXCAR,数字式BOXCAR不受物理因素上的限制,在进行存储和处理数据时,不会出现漏电和漂移问题。为了实现数字BOXCAR对信号的处理,完成数据的高速缓存及积分的功能,采用的核心是飓风IV系列的FPGA,其由Altera公司发布,使用灵活方便,功耗低、性价比高;模数转换的规格是双通道12bit,使用采样率为100MSPS的高速A/D转换器;使用PCI接口与上位机进行通讯和传输。
时序逻辑控制采用VerilogHDL硬件描述语言完成,以采集和积分同时进行的方式,实现数字BOXCAR的功能,既能减少耗费的时间,也避免占用了存储器的资源。其过程为:先确定好积分的次数n,然后开始采集。FPGA接收A/D传出的数据,把第一次采集到的所有点依次存入RAM中,第一次采集完成后,开始第二次采集。继续获取A/D的数据,与RAM中存入的数据依次叠加,并再次存入到RAM中,开始第三次集采,并重复上述操作,直到第n次结束。整个操作流程图如图2:

图2 数字BOXCAR实现流程图
3 实验及分析
对BOXCAR处理散射光信号的可靠性和降噪的性能做验证,使用1km长的多模光纤,放置在25℃的环境下对温度进行测量,实际的有效测量长度为900m。使用数字BOXCAR对采集的数据进行了500次、1000次、4000次和8000次的处理,经过上位机解调后的温度曲线如图3所示。Anti-Stokes光信号在多模光纤中的衰减比Stokes光信号的要小,两者光通量的比值也随着光纤距离的增加而变化,光纤上的损耗必定伴随着误差;而因色散的影响,频率不同的Anti-Stokes和Stokes信号在光纤中的速度也会不同,在采集时,同一时刻的两个散射光信号会对应不同的位置,同一位置上的信号的延时必定会造成测量位置和实际位置上的偏差。上位机在进行解调时已经做了补偿和修正,所以最终获得的温度曲线总体近似水平,没有出现较大偏移。
图3(a)是经过500次处理后的温度曲线,曲线上噪声依然很明显,测量的温度波动较大,高达10.62℃;图3(b)是经过1000次处理后的温度曲线,相较于(a),明显改善了很多,温度波动范围降低到5.53℃;图3(c)是经过4000次处理后的温度曲线,温度波动降至1.55℃;图3(d)是经过8000次处理后的曲线,可以看出噪声被抑制了,温度值的浮动已经小了许多,在0.81℃的范围内,信噪比改善较明显,测温的准确性显著提高。具体数据如表1所示。
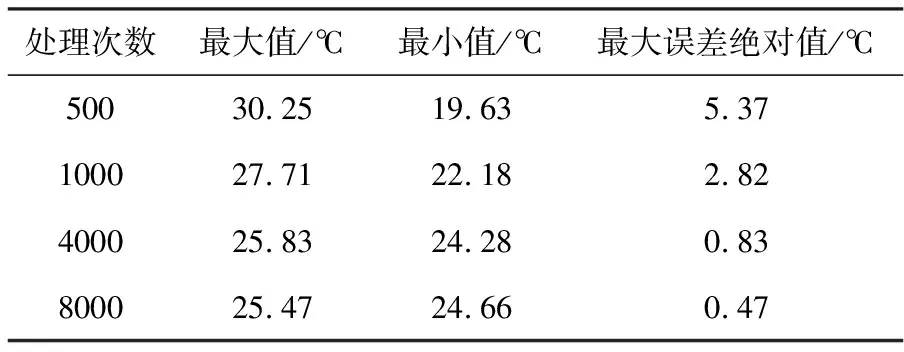
表1 光纤测温数据
从表1中可看出,随着积分次数的增多,误差值在减小,更接近于实际的温度值。但BOXCAR处理信号的缺点就是:积分次数和误差的关系可以类比为第一象限中的反比例函数的图像,积分次数作为横轴一直地增加,误差作为纵轴减少地越来越慢,但耗费的时间却是在一直增长。所以选择合适的积分次数,能保证误差小、时间短,使效益最大化是相当重要的。

图3 温度曲线图
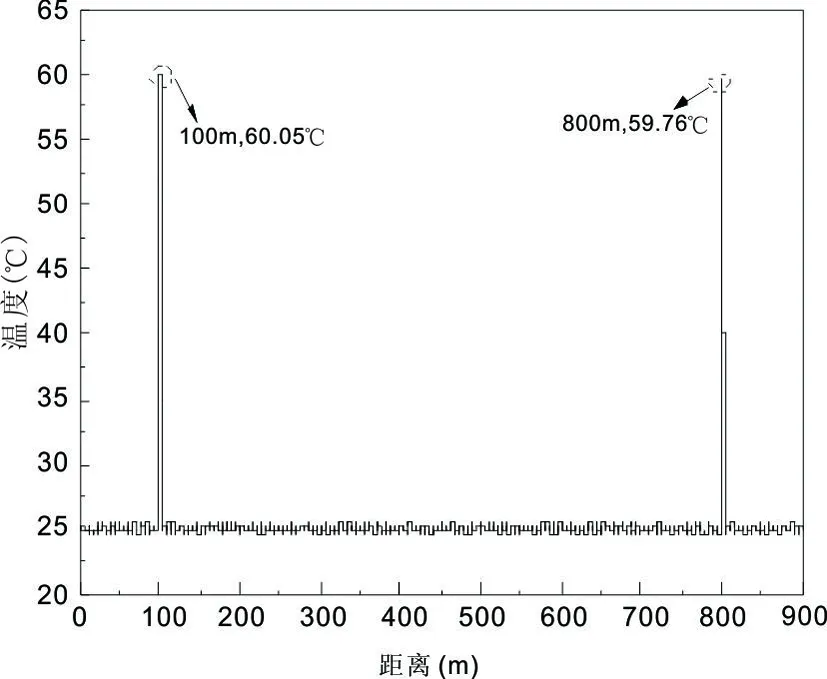
图4 升温测试曲线图
取光纤上100m和800m点处做“异常”温度测试,置于60℃的温度下,其他部分保持在原本环境下进行测量,测得的温度曲线如图4所示。图中两个最高的点,分别是:100m处的60.05℃和800m处的59.76℃,随着光纤距离的延申,测量温度的误差逐渐变大,分别为+0.05℃和-0.24℃,其误差在允许范围内,表明BOXCAR降噪的可靠性。由于在光纤末尾会出现菲涅尔反射以及光纤距离的增长反射光变弱[7],也会使定位出现稍微的误差。除了减小色散的影响外,还可以对补偿算法进行改进,使测温定位精度更加准确。
通过对散射光信号进行BOXCAR处理,可验证分布式光纤拉曼测温系统的可靠性和准确性。对比处理的次数,使用BOXCAR均有明显的改善效果。当积分次数达8000次时,温度曲线趋于平稳,波动较小,在定位时误差也较小,具有实际应用的价值。除了使用BOXCAR积分降噪外,还有小波分解、小波包去噪等方法可对信号进行处理[8],也能取得很好的结果;或者是把多种方法相结合,能够有更显著的效果,最终的数据会更加准确。
4 结 语
本文在分布式光纤拉曼测温系统的基础上,对采集到的散射光信号进行BOXCAR处理,经过8000次的积分,能明显抑制原始信号的噪声,成功提取出淹没在在噪声中的有效信号,并使最终解调出的温度误差区间降低至0.81℃,测温的距离达到900m。
猜你喜欢
辽宁省博物馆馆刊(2021年0期)2021-07-23
科技资讯(2021年2期)2021-03-28
中国医科大学学报(2020年2期)2020-04-18
石油化工建设(2019年4期)2019-10-10
电子制作(2017年8期)2017-06-05
科学与财富(2017年15期)2017-06-03
光学精密工程(2016年1期)2016-11-07
电子制作(2016年21期)2016-05-17
中国医药指南(2016年20期)2016-01-31
自动化与仪表(2014年10期)2014-02-26
