
电动汽车无线充电系统SS型补偿拓扑研究 ①
2021-01-15 03:27高俊岭
佳木斯大学学报(自然科学版) 2021年1期
高俊岭, 张 强
(安徽理工大学电气与信息工程学院,安徽 淮南 232000)
0 引 言
随着科技的发展以及环保等方面的要求,电动汽车迎来了高速发展,电动汽车无线充电技术也受到了广泛的关注。在静态无线充电系统中,为了补偿漏感,需添加相应的补偿电路,目前有SS型、SP型、PS型以及PP型这四种基本的补偿电路。本文对SS型补偿拓扑进行分析,采用控制变量法,通过Matlab软件对其进行仿真实验。进而根据仿真结果研究SS型进行补偿拓扑的无线充电系统在不同的电阻、电感和频率下系统的输出功率、传输功率的变化特点。
1 磁耦合谐振式无线充电系统
目前的无线充电技术主要包括电磁波辐射式、电磁感应式以及磁耦合谐振式无线充电技术等,其中磁耦合谐振式无线充电技术的传输功率较大且适合中距离传输,更适合应用于电动汽车无线充电领域。
在磁耦合谐振式无线充电系统中,首先会将电网提供的交流电进行整流滤波转化为直流电,然后再进行高频变换使其成为高频交流电,最后通过由补偿网络与发射线圈组成的原边谐振单元来为副边提供电能。副边的补偿网络和接收线圈组成接收端谐振单元,此谐振频率与原边谐振单元的谐振频率相同,副边接收的电能为高频交流电,然后通过整流滤波和一系列后续处理转变为可为电动汽车中的电池供电的直流电。电动汽车磁耦合谐振式无线充电系统的结构图如图1。
2 无线充电系统SS型补偿拓扑分析
磁耦合谐振式无线充电系统相当于松耦合变压器,系统中存在着大量的漏感,通过在系统中添加电容可以补偿漏感,提高系统的输出功率和效率。补偿电容和电感线圈的连接形式有串联和并联两种,系统中有原边和副边两组电感线圈,因此整个系统一共可应用四种基本的补偿拓扑。这四种补偿电路包括SS型、SP型、PS型以及PP型[2]。其结构图如图2所示。
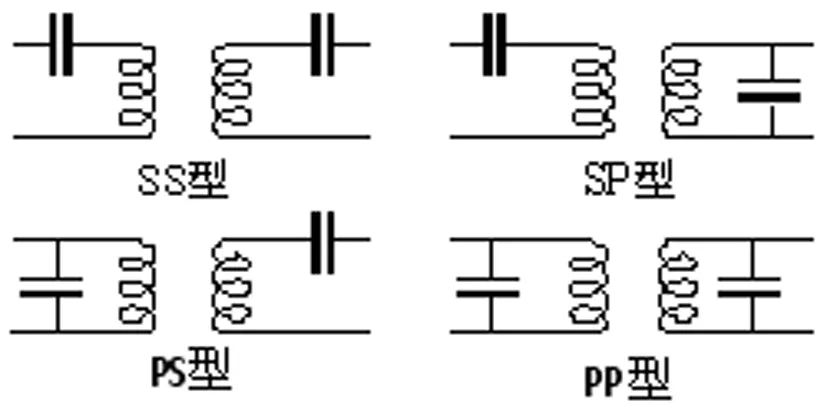
图2 补偿拓扑结构图
以SS型补偿拓扑为例,添加输入电压及负载,得到SS型补偿电路的互感等效模型,并对其进行分析。其结构图如图3。
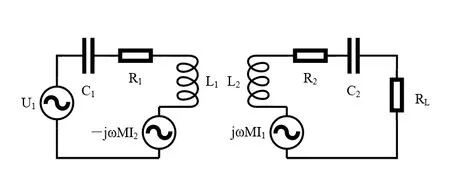
图3 SS型补偿拓扑的等效电路模型
如图3所示,U1为原边电路输入电压,C1为原边电容,R1为原边线圈内阻,L1为原边电感,-jωMI2为原边互感等效电压源;jωMI1为副边互感等效电压源,L2为副边电感,R2为副边线圈内阻,C2为副边电容,RL为负载电阻。M为电感线圈的互感。对原、副边列写回路方程有:
(1)
(2)

(3)
(4)
由(3),(4)式可得整个系统的输入、输出效率:
(5)
(6)
则可得系统的传输效率:
(7)
3 SS型补偿拓扑的负载特性分析
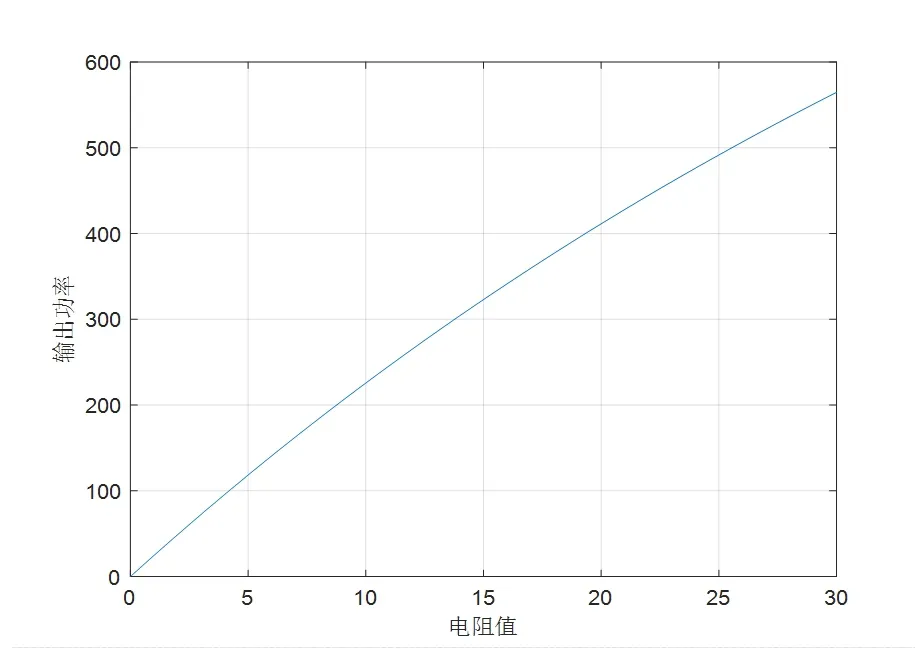
图4 输出功率随负载的变化曲线
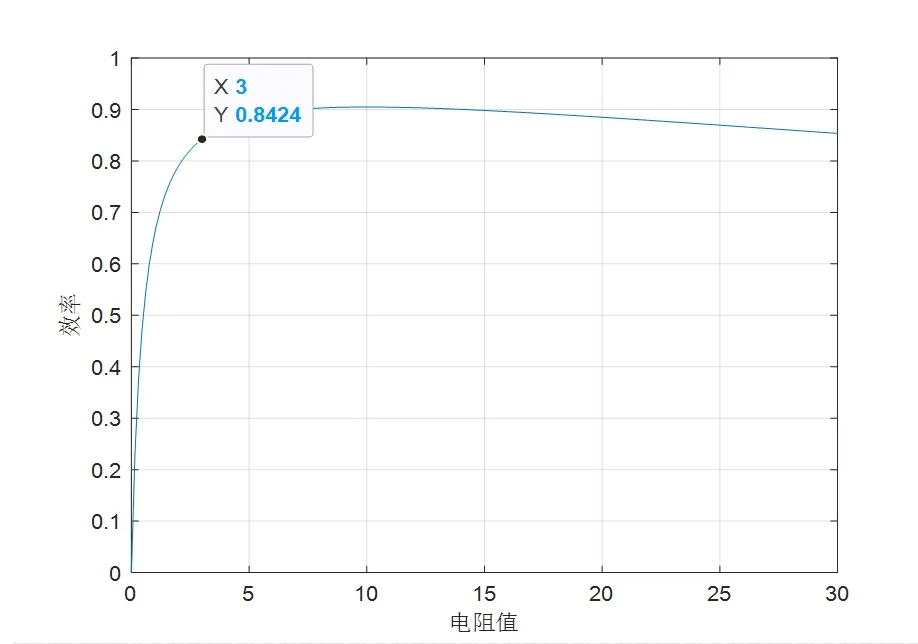
图5 效率随负载的变化曲线
由图4可知,SS型结构电路的输出功率随负载的增大而线性增大,并且由公式(6)可得系统的输出功率可由改变U1而改变,且根据公式(7),系统的效率并不受U1变化的影响。
由图5可知,系统的效率在0~3Ω时较低,但效率的增长速度很快,在3~30Ω这一阶段效率的增速缓慢,但效率值均高于80%。电动汽车充电过程中的电池等效电阻一般在3~20Ω之间,因此SS型结构电路可在电动汽车无线充电过程中保持高效率。
4 SS型补偿拓扑的互感特性分析
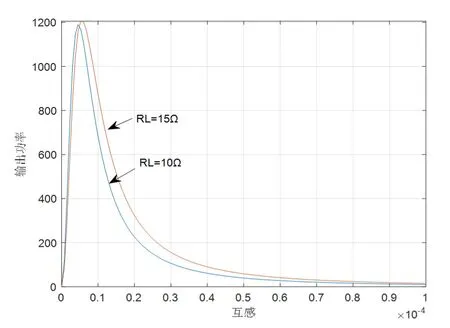
图6 输出功率随互感的变化曲线
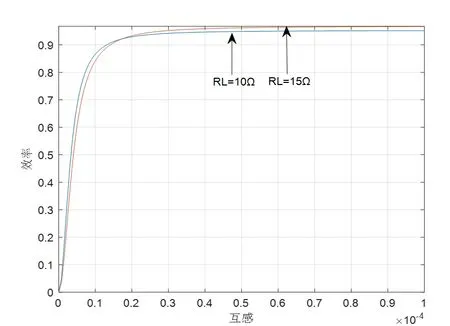
图7 效率随互感的变化曲线
电动汽车停车充电时的位置,汽车充电设备距离地面的位置等都会导致互感的变化,电动汽车无线充电系统的互感大致在10~30μH之间,在这一阶段由图6可知,随着互感的增加,输出功率在不断下降,但其仍保持较高的数值。而根据图7,随着互感的增加,系统的效率在提高,且效率都在80%以上,由此可知SS补偿拓扑的电路在电动汽车无线充电系统的互感范围内可保持较高的输出功率和效率。
5 SS型补偿拓扑的频率特性分析
以系统的角频率ω为自变量,ω在400×103rad/s-600×103rad/s之间,负载RL分别取10Ω和15Ω,互感M=20×10-6H,其他参数同上,在对系统进行分析时要注意的是频率的改变会导致系统出现非谐振的情况,因此式(5)、式(6)和式(7)都会发生相应的改变,此时有:
(8)
(9)
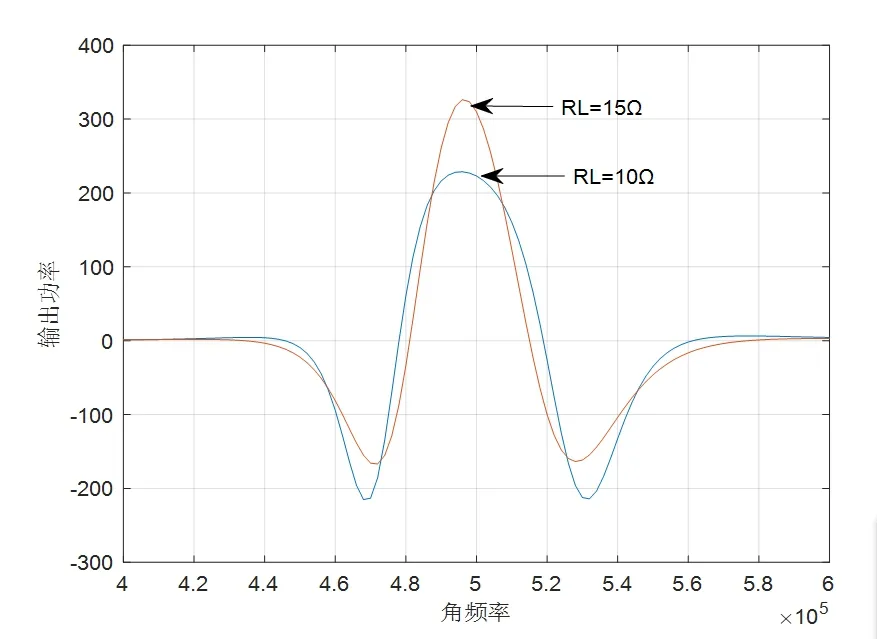
图8 输出功率随角频率的变化曲线
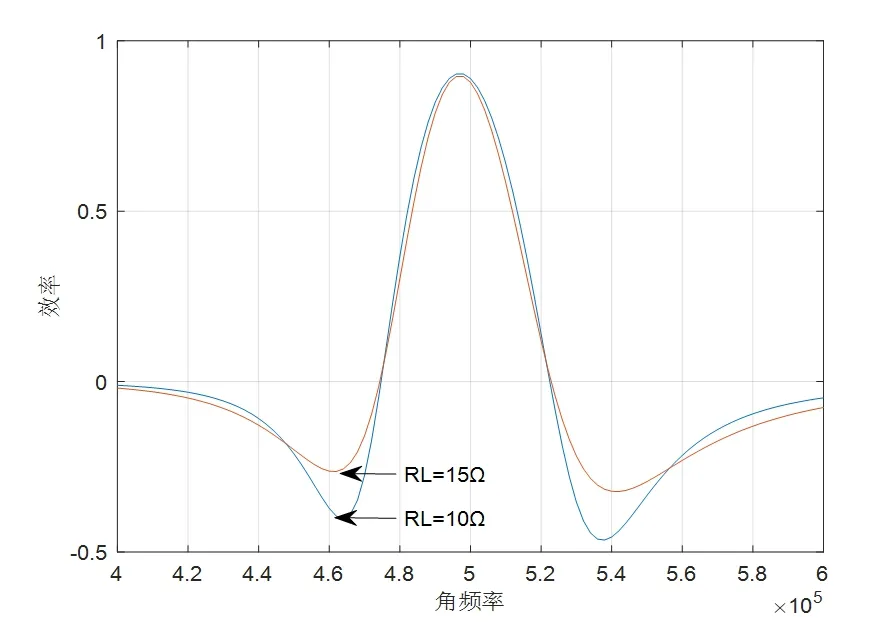
图9 效率随角频率的变化曲线
(10)
依据式(8)、式(9)和式(10)进行matlab仿真,结果如下图:
由图8和图9可知,系统的输出功率和效率均在ω=500×103rad/s处达到峰值,说明谐振频率是该系统的最佳频率。并且峰值处较为平缓,说明系统可以承受一定的频率波动。然而输出功率和效率在系统频率与谐振频率有较大出入时会急剧下降,这说明了系统运行过程中要避免频率波动过大。
6 结 语
SS型补偿拓扑结构简单,电动汽车充电过程中的电池等效电阻为3~20Ω之间,互感大致在10~30μH之间[8],在这些条件的约束下SS型补偿拓扑的电动汽车磁耦合谐振电路系统仍能保持较高的输出功率和效率;并且通过频率特性分析可知,SS型补偿拓扑的电动汽车磁耦合谐振系统还能够承受较大范围的频率波动。因此SS型补偿拓扑可作为电动汽车磁耦合谐振电路的最优补偿电路。
猜你喜欢
湖南电力(2021年2期)2021-05-08
中学物理·高中(2016年12期)2017-04-22
西南交通大学学报(2016年3期)2016-06-15
通信电源技术(2016年4期)2016-04-04
中国学术期刊文摘(2016年2期)2016-02-13
文理导航(2015年14期)2015-05-22
电测与仪表(2015年11期)2015-04-09
城市轨道交通研究(2015年3期)2015-02-27
物理教学探讨(2014年3期)2014-09-05
燕山大学学报(2014年2期)2014-03-11
