非线性预测控制及其在微电网中的应用
2021-01-13 07:03:20卢一相高清维
河南科技大学学报(自然科学版) 2021年2期
王 建,卢一相,高清维,余 益
(安徽大学 电气与自动化学院,安徽 合肥 230601)
0 引言
随着物联网范式的广泛应用,网络化多智能体控制技术在许多实际系统中都扮演着关键的角色,例如智能电网[1]、卫星编队、自动驾驶系统[2]、飞行编队[3]、机械臂[4]和移动机器人[5]等。因此,通过通信网络连接所有个体或者子系统形成的分布式控制系统(网络化多智能体系统)成为近年来的热门研究领域[6-7]。对网络化多智能体系统的分析,主要是研究网络结构和个体之间的交互对系统全局目标的影响。一般而言,分布式控制器在使用共享局部信息的情况下,将拥有和使用与全局信息同样的性能,这也是分布式控制广受关注的一大原因。文献[8]针对具有不确定性和定向通信拓扑的网络拉格朗日系统的协调跟踪控制,提出了一种自适应容错协同控制方案。文献[9]研究了具有通信延迟的网络化多主体系统的平均一致性,并获得了用于平均一致性的充分条件,得出在有界通信延迟下系统仍存在平均共识的结论。文献[10]提出了设计分布控制律的统一框架,而且证明了后向水平动态优化方法可以用来实现非线性多主体系统的预测次优共识。
在分布式系统中,联网的多主体之间不可避免地存在通信约束,例如网络延迟、数据包丢失和数据攻击。显然,这些通信约束会降低所设计控制器的性能。为了克服这些不利因素,基于网络传输矢量数据流的特性和模型预测控制策略,文献[11]提出了一种网络预测控制方案。文献[12-14]将这些网络化的多主体预测控制方法应用于不同类型的多主体系统。对于具有不变网络时延的同构网络多主体系统,文献[12]设计了一种基于网络预测控制的分布式协议。对于具有网络延迟和状态不可测的异构网络多主体系统,文献[13]提出了使用网络预测控制方案的分布式控制协议,这使得共识的充分必要条件与网络延迟无关。文献[14]通过引入同时稳定性和共识性的概念,建立了一种主动补偿网络延迟和分组数据丢失的预测性控制器设计方法,实现了网络化多主体控制系统的稳定性和共识性。文献[15]研究了具有可变网络拓扑的通信延迟多智能体系统,并提供了共识机制。
文献[16-17]将智能电网系统建模为网络化多智能体系统,然后借助一致性理论设计分布式控制器,以解决其电压、频率同步及功率分配等问题。文献[18]将物联网技术和混成控制理论引入微电网中, 形成了多目标控制问题,改进了混成控制原有的系统层级模型,并基于电压控制约束条件实现了微电网电能质量的实时控制。不同于主从和对等控制[19],文献[20]基于多智能体一致性理论提出了一种分布式无功功率控制策略,应用动态一致性算法对无功功率的差值进行迭代求和,借助积分控制器对下垂特性曲线的参考电压幅值进行自适应地补偿,从而实现无功功率的合理分配。
现有的关于分布式预测控制解决通信约束下系统输出一致性问题的文献中,基本上都是假设其系统模型为线性的。而在实际应用中,如智能电网,由于滤波电路和耦合连接器的存在,系统往往是非线性的。这使得已有的分布式预测控制算法并不能很好地适应于这些场景,因此,如何设计协调控制协议,实现多智能体之间的协调,并主动补偿通信约束,是一个重要问题。本文将针对具有异质通信约束的非线性网络化多智能体系统,提出一种分布式协调预测控制算法,实现多智能体的输出一致性。在四节点微电网系统上执行了一系列的仿真,用来验证所提出的控制策略的有效性和鲁棒性。
1 预备知识和问题描述
1.1 图论知识
将一个具有N个智能体的多智能体系统描述为一个具有N个顶点的无向图G={V,E,A}。V是图G的顶点集,满足V={1,…,N},1,…,N是顶点的序号。E是图G的边集,满足E⊂V×V。图G的一条边(i,j)∈E表示一对顶点i和j互为邻居,邻居之间可以彼此接收到对方发送的信息。顶点i的邻居集可表示为Ni={j∈V|(i,j)∈E}。图G的邻接矩阵表示为A=(aij)N×N,当顶点i与顶点j之间存在连接时,aij=1,否则,aij=0。假设图G没有自环,即(i,i)∉E,且令邻接矩阵A的主对角元素为aii=0。如果图G中任意两个顶点都互为邻居,则图G为完全图。如果从顶点i到另一个顶点j有一条路径,那么顶点i和j是连通的。若图G中任意一对顶点都是连通的,则图G称为连通图。对于非平衡图,可以定义出度为dout(i)=∑j∈Niaij,入度为din(i)=∑j∈Niaji,当出度等于入度时,称G为平衡图,否则,为非平衡图。d=diag{d(i)}定义为平衡图G的度矩阵,其中d(i)=∑j∈Niaij。相应地,图G的拉普拉斯矩阵L定义为L=D-A。
1.2 非线性异质时延系统的跟踪问题
考虑以下具有N个智能体的非线性网络化系统[11]:
(1)
其中:xi为系统的状态变量;u′i为控制输入;f′i和g′i为已知的非线性函数;Di为外部干扰。
在非线性多智能体系统中,存在多个控制器,并且各个代理控制器之间必须考虑多智能体之间的交互。在单个智能体系统中,代理控制器单独采用控制策略,例如,网络预测控制[14]。现在,不仅要考虑动态性能和控制目标,而且还需考虑智能体通信过程中的限制。在这种情况下,由于网络化多智能体系统中的所有代理都通过网络与多智能体系统进行通信,每个代理控制器基于自身的信息以及与其他代理控制器共享的信息来解决控制问题,以提高整体性能。随着系统规模的增加,非线性多智能体系统所捕获的实时数据和实时计算的密度和大小都将急剧增加。因此,引出了许多挑战,包括数据的捕获、存储、可视化、共享、传输、搜索和分析,以及计算任务的分配和协调等。
关键的通信约束是网络延迟和数据丢失。这些通信约束会严重影响网络化多智能体系统的性能。因此,接下来将在控制器的设计中考虑如何消除这些通信约束对系统带来的不利影响。假设第i个代理的网络延迟为ρi,数据丢包为si,令通信约束τi=ρi+si,i∈{1,2,…,N}。为了解决这些约束,需要开发一种新的网络化控制结构。通信网络的关键特性之一是每次可以传输一个数据包,而不是单个数据,这在非网络控制系统中是无法做到的。充分利用这一网络特性,为网络化多智能体系统引入网络化预测控制策略,克服网络随机时延和数据丢失的影响。该策略由控制预测发生器和网络约束补偿器组成。基于动力学模型和待优化的性能函数,预测控制器将利用直到时间t的所有可用信息生成控制预测序列,该信息包含从时间t开始向前几步的控制预测。所生成的预测控制序列将被打包并通过网络传输到被控代理端。被控代理端的网络约束补偿器根据通信约束的类型,从所有可用的控制预测序列中选择时间t的最新预测控制,并将其应用于被控智能体的执行器。这样,通信约束,尤其是网络延迟和数据丢失将被预测项主动补偿,同时预测控制器将提供与没有通信约束的网络化多智能体系统相同或渐近的控制性能。对网络化多智能体进行以下假设和约定:
(Ⅰ)控制器与第i个智能体传感器之间存在通信约束τi。
(Ⅱ)控制器与第i个智能体执行器之间存在的延迟远小于网络延迟,此通道延时将被忽略。
(Ⅲ)通信约束τi是系统采样周期的整数倍,为已知整数。
对于式(1)中表示的非线性多智能体系统的动力学,假设其输出和输入之间的直接关系可以由输出的二阶导数生成,则非线性系统(1)可以写成如下二阶系统[21]:
(2)

∂(∂hi/∂xi·f′i)/∂xi≠0的假设成立。

(3)
其中:
为得到离散化系统,对系统(3)施加欧拉离散化,有:
(4)

2 分布式预测控制器设计
为了设计分布式控制器的预测项,对于第i个代理考虑如下成本函数Ji(t):

(5)
其中:Ny,Nu分别为输出预测窗口和输入预测窗口的大小;bi和ci分别为协同和控制成本增益;gi为牵制增益;
系统的状态量可测,但是在实际系统中,高频振荡及测量误差噪声的存在,往往使得传感器的测量值并不准确。因此,对于分布式发电单元i的各状态变量值,将采用如下状态观测器的估计值:

(6)
接下来,将第i个分布式单元的状态预测分为以下3个阶段:
(Ⅰ)状态预测,从t-τi+2到t:
循环代入式(6),有:
其中:k=2,…,τi。
(Ⅱ)状态预测,从t+1到t+Nu:
(7)
其中:k=1,…,Nu。
(Ⅲ)状态预测,从t+Nu+1到t+Ny:
其中:k=1,…,Nu+2,…,Ny,…,Ny+τj。
因此,根据式(6)和式(7)可以得到如下预测输出方程:
(8)

即
将输出方程(8)代入上式,有:
整理有:
因此,网络预测发生器的输出为:
(9)
其中:
以上完成了网络预测发生器部分的设计,接下来网络约束补偿器将发挥作用,将在预测序列中选择合适的预测量用于实际系统中。在分布式单元i的控制侧,执行器中的网络约束补偿器会根据当前的时延情况选择需要的控制输入。基于式(9),t时刻网络约束补偿器输出的最优预测控制计算如下:
其中:Hv,i是第i个元素为1,其余均为0的N维数列向量。
3 仿真验证
为验证网络化分布式预测控制算法的有效性,将其应用于一个具有4个分布式发电单元的交流微电网系统的电压恢复问题。其大信号模型如下:
其中:xi(t)=[PiQiiLdiiLqivodivoqiiodiioqi]T;Di=[vbdivbqi]T;fi,ki,gi的具体形式见文献[22]。
通过MATLAB/Simulink仿真软件搭建微电网仿真模型,其中,滤波电路参数、下垂系数和耦合连接器的参数均参见文献[21]。考虑有向拓扑,其中拓扑矩阵为a12=1,a23=1,a34=1,a41=1,其余元素为0,且分布式发电单元之间的时延为τ1=2,τ2=3,τ3=2,τ4=4。控制器各系数为Ny=14,Nu=12,对于i=1,…,4,选择观测器参数为Li=[0.3,-2.5], 选择bi=5,ci=0.2,且g1=0.3,其他元素的牵制增益为g=0。接下来所有仿真中出现的变量值都采用标幺值。特别值得注意的是,仿真图中的DG表示分布式发电单元,给定值表示设定的参考输入。为验证本文所提出的控制策略在微电网电压恢复方面的有效性,设计了不同工况,对所提出的控制策略的性能进行分析。一种是使用含有和不含协调项的分布式预测控制器进行电压控调节。不具有协调项控制器作用下的微电网电压输出幅值如图1所示,含有协调项的电压输出幅值如图2所示。另一种是使用含有协调项的分布式预测控制器在不同权重因子下进行电压调节,其不同的电压输出幅值见图3。
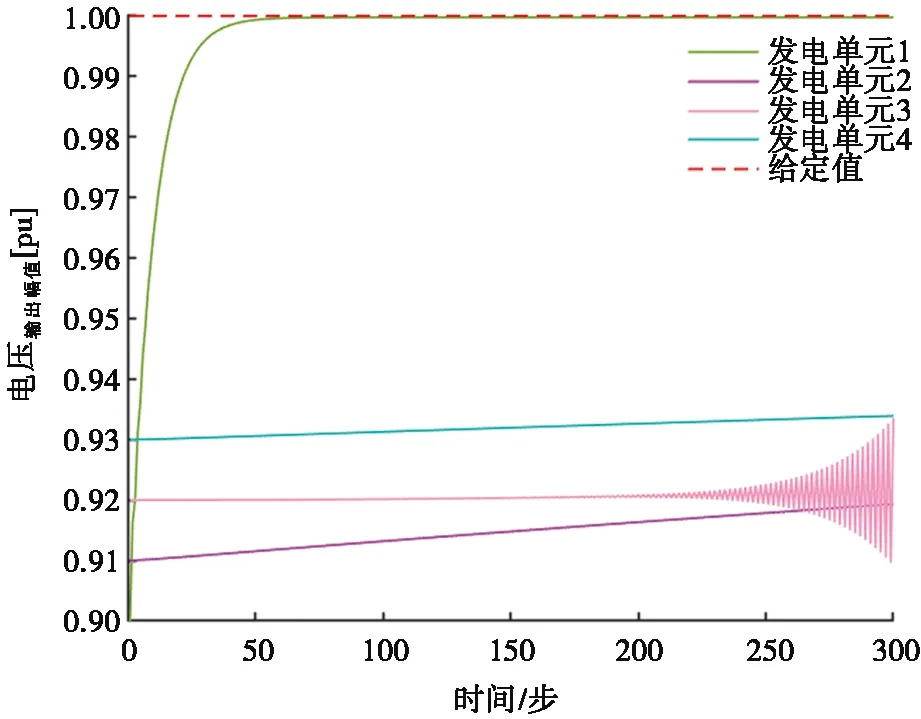
图1 控制器中无协同控制项的电压输出幅值
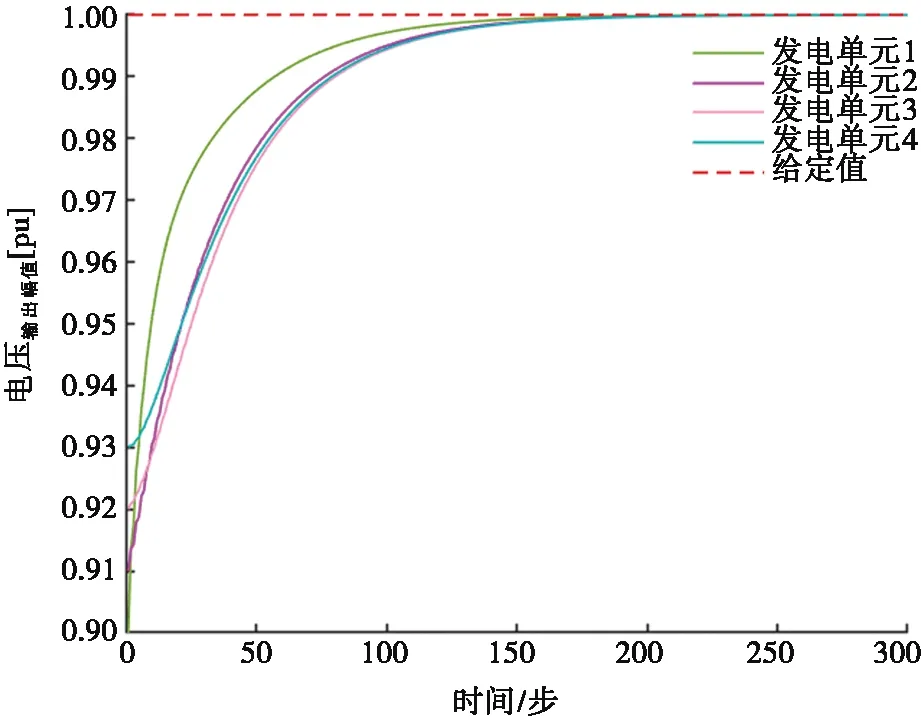
图2 控制器中含协同控制项的电压输出幅值
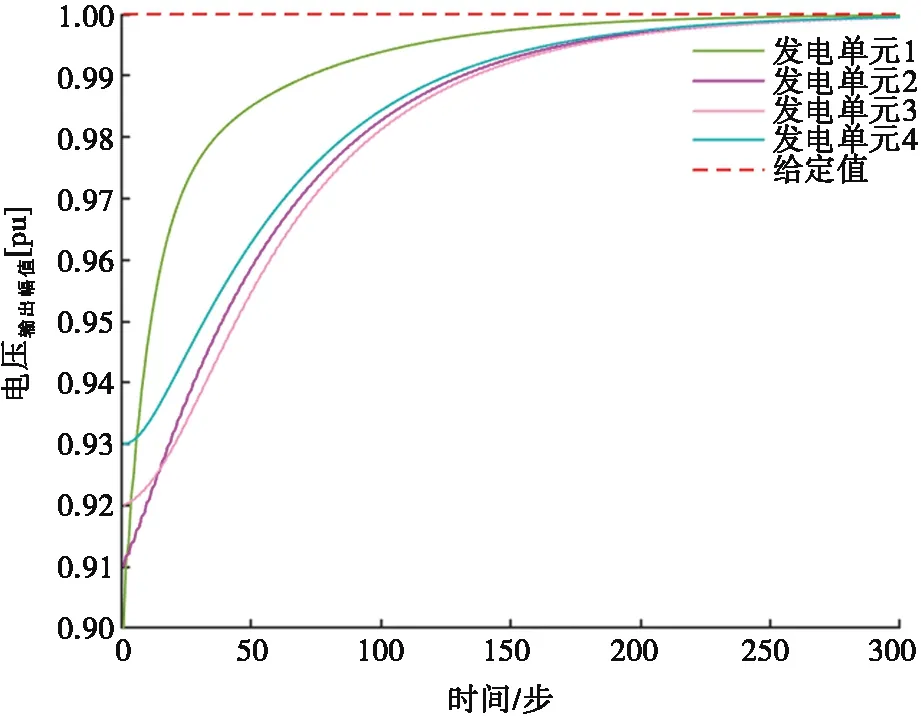
图3 不同协调增益和跟踪增益的电压输出幅值
由图1可知:由于控制器中没有引入协调项,只有牵制节点,第1个发电单元可以完成给定电压值的跟踪,而其他发电单元则不能完成跟踪任务。图2则显示了施加协调项结果,从图2中可以看出:分布式预测控制器可以很好地实现微电网输出电压幅值的跟踪,而且系统能够很快地恢复到期望值。综合比较图1和图2可以得出结论:在牵制控制的框架下,网络中的发电单元必须直接或间接地获得参考值,否则将无法完成跟踪;对于并非所有发电单元均可获得参考值的情况,预测控制器中的协调项是不可或缺的。图3为不同协调增益和跟踪增益的输出电压幅值图,其中增益取bi=9,ci=0.2,且g1=0.2。从图3中可以看出:控制器可以很好地实现微电网输出电压的跟踪,从而恢复到期望值。为进一步说明协调增益、跟踪增益和控制增益对控制性能的影响,给出了4组不同控制增益下的控制成本、跟踪成本和总成本,如表1所示。从表1中可以看出:控制器增益的选取会影响闭环系统的性能,具体而言,随着协调增益与控制增益比值的增大,跟踪效果会更好。

表1 不同控制增益下的控制成本、跟踪成本及总成本
4 结束语
本文提出了一种针对网络化非线性多智能体系统的分布式预测控制方法,利用分布式预测控制策略解决了一类可输入、输出线性化的非线性多智能体系统在遭受通信约束时的输出一致性问题。该方法能够同时实现一致性和稳定性,并能主动补偿系统所遇到的异质通信约束,如时延和数据丢包。介绍了分布式预测控制的体系结构,给出了非线性系统的分布式预测控制器的设计过程,并在微电网系统的电压恢复问题上对所提出的控制器进行了仿真验证。微电网系统上的仿真验证了所提出的针对非线性多智能体系统的分布式预测控制策略的有效性、实用性及稳定性。值得一提的是,在现实生产过程中,部分高维的非线性系统并不满足输入输出线性化所需的对合条件。因此,对于这样的高维非线性多智能体系统,如何设计网络化预测控制器以解决其状态、输出一致性等问题将是未来值得研究的方向。
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20 07:23:56
电子制作(2019年19期)2019-11-23 08:41:36
电子制作(2018年19期)2018-11-14 02:37:02
能源(2017年10期)2017-12-20 05:54:07
能源(2017年5期)2017-07-06 09:25:54
新闻传播(2016年11期)2016-07-10 12:04:01
雷达与对抗(2015年3期)2015-12-09 02:38:50
河北大学学报(自然科学版)(2015年1期)2015-02-27 13:06:12
中国人民大学学报(2014年5期)2014-04-16 05:32:42
食品工业科技(2014年15期)2014-03-11 18:17:43