
星载天线展开过程立体视觉动态测量技术
2021-01-13 07:26:22孙增玉崔忠亮
宇航计测技术 2020年6期
高 越 孙增玉 袁 媛 崔忠亮
(北京航天计量测试技术研究所,北京 100076)
1 引 言
星载天线是卫星结构的重要组成部分,是直接执行卫星功能的重要平台,受运载火箭仪器舱容纳尺寸的限制,搭载卫星多采用可展开的结构形式,其中可展开天线是大口径卫星天线结构形式的首选[1]。桁架式网状天线收纳比大、质量轻、型面精度高,综合性能表现最为出色,适合于大口径天线,是目前研究最多的一种星载可展开天线。桁架天线的运动部件多达几千个,在快速展开过程中,其中任何一个部件发生问题,都将会导致天线展开失败,使得卫星不能正常工作,致使发射任务功亏一篑[2]。因此,星载天线展开机构在地面进行的零重力模拟展开可靠性评估试验至关重要。
可展开天线为一不稳定的体系,在展开过程中其运动速度、加速度、轨迹、约束反力等都在不断地变化,为保证设计的可靠性需要对其展开过程做详细分析[3]。设计者最关心的是展开过程中的几何协调性、天线能否展开到位、在特定驱动力作用下结构展开的运动学特征,并且星载天线反射面的型面精度与天线的电性能息息相关,展开后的几何型面参数也是关注的重点。然而,在地面模拟零重力展开试验中,直径约4米的星载天线在2秒以内可完全展开,展开速度大,目前借助高速摄像机录制其展开过程视频,通过观察定性分析设计结构的展开可靠性。本文提出基于立体视觉测量原理的星载天线动态展开测量方法,可获得各运动部件关键点的运动轨迹、速度、加速度以及展开面型等数据,为设计者进行动力学和可靠性分析提供依据。
2 立体视觉动态测量技术
基于双目立体视觉原理,采用两台高速相机在同步脉冲控制器的触发下同步采集某时刻天线的展开状态图像,经图像预处理获得该时刻空间特征点在像面上的图像坐标,通过双相机内外参数和视差交会模型解算出该时刻特征点的空间三维坐标。在连续等时间间隔的同步脉冲控制下,可以获得特征点在空间的运动轨迹,经过时间微分等数据处理方法得到特征点的运动速度、加速度等运动特性参数。在完全展开处于静态后,各特征点的三维空间坐标构成了整个天线的三维面型,可用于面型误差的计算,系统组成如图1所示。
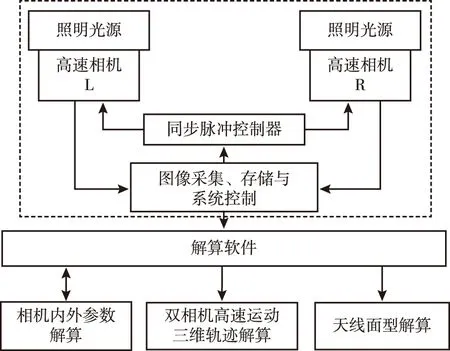
图1 动态测量系统框图Fig.1 Block diagram of dynamic measurement system
2.1 双目立体视觉交会坐标解算
双目立体视觉是基于视差原理,由多幅图像获取物体三维几何信息的方法[4]。已知两个相机之间的位置关系,便可以获取公共视场内空间物体特征点的三维坐标。如图2所示,设Oc1-Xc1Yc1Zc1为相机L坐标系,像平面坐标系为O1-X1Y1,有效焦距为f1;Oc2-Xc2Yc2Zc2为相机2坐标系,像平面坐标系为O2-X2Y2,有效焦距为f2,将相机L坐标系作为测量系统坐标系Os-XsYsZs。

图2 双目视觉测量原理图Fig.2 Binocular vision measurement principle

(1)
根据相机透视投影模型及双相机位置关系,空间点P的三维坐标可表示为
(2)
式中:f1、f2——分别为相机L和相机R的有效焦距。
由公式(2)可知,已知有效焦距f1、f2和被测点在两相机像平面上的精确图像坐标(X1,Y1)、(X2,Y2),只要求出旋转矩阵R和平移矩阵T,即可求解获得空间点P在测量系统坐标系下的三维坐标(xs,ys,zs)[5]。有效焦距、光心位置、镜头畸变等内部参数可在实验室经基于立体靶标的标定方法获得,而外部参数是根据双相机在现场的架设情况确定,通过下述基于标准长度的标定方法获得。
2.2 基于标准长度的相机外参现场标定方法
双目立体视觉测量系统的外部参数标定主要是确定双相机之间的相对位置关系,即视觉系统结构参数R和T[6]。由于可展开天线的口径很大(数米甚至十几米),这要求双相机公共测量视场要覆盖整个空间,同时为保证测量精度,双相机的基线距离也会达到数米甚至十几米,这对双相机系统的外参标定提出了更高的要求,经典的平面靶标尺寸无法满足标定需求,需要设计满足大范围测量的现场快速标定方法。
利用测量视场中两点之间的长度作为约束条件,实现基于标准长度的相机外参现场标定方法。用含有8个点的编码靶标与带有标准长度的标准杆组成新的标定结构如图3所示,通过图像中编码标识的识别准确定位标尺在图像中的位置,利用两编码标识中心点的标准长度作为约束,利用L-M迭代法将标准杆上的标准长度与像面上的像点坐标联系,组成新的约束条件方程,通过迭代计算该约束条件方程,获得高精度的标定相机外参数。

图3 编码靶标基准尺Fig.3 Coded target scale
设空间点P在左右相机的图像坐标为(X1,Y1,1)和(X2,Y2,1),根据公式(2)计算空间点P的三维坐标(xs,ys,zs),由公式(2)中的第三式可得
f(x)=(f2t1-X2t3)(Y2(r7X1+r8Y1+f1r9)-
f2(r4X1+r5Y1+f1r6)-
(f2t2-Y2t3)(X2(r7X1+r8Y1+f1r9)-
f2(r1X1+r2Y1+f1r3)=0
(3)
其中,x=(r1,r2,r3,r4,r5,r6,r7,r8,r9,t1,t2,t3)为12个未知变量,r1~r9构成的旋转矩阵R是正交的,具有六个正交约束条件,(t1,t2,t3)为沿X、Y、Z方向上的平移量,由此构成如下罚函数为
(4)
由所有光测点得到无约束最优目标函数为
(5)
为提高算法精度,引入基准尺的标准长度D,如图3所示。在已经精确校准内部参数的相机像面上,通过识别编码标识找到中心点坐标Pij(xij,yij,zij),得到两点的距离Di(i=1,2,3,…,n)为测量次数,(j=1,2)为每次测量的中心点位。由中心点距D引入加强约束目标函数
(6)
目标函数为
(7)
最后,由Levenberg-Marquardt法进行非线性最优化解算,获得双相机的外部参数。
2.3 动态多目标点识别跟踪方法
在大型可展开天线地面展开试验过程,大型可展开天线从收拢状态运动到展开状态,须同时动态拍摄并测量展开区域内的多个运动目标(200个以上)的接触与分离状态,各点的运动速度快且运动幅度大,相对位置关系排列准则随时间推移将发生变化,传统的极线约束无法满足各点序号前后一致性的判断,为保证各被测点序号之间不能混淆和错乱,准确获得各点的连续运动轨迹,须对各点进行跟踪测量。
根据视差连续性,除了遮挡区域视差的变化应该都是平滑的,以此作为匹配约束,实现对各点的连续跟踪。针对某一目标点为例,遍历所有时刻进行目标点跟踪的过程如图4所示。首先获取0时刻目标点中心图像坐标(X0,Y0),下一时刻以该点为中心的子窗口中搜索临近点,判断临近点个数是否唯一,如果唯一作为该时刻目标点获取该点中心坐标(X1,Y1);如果不唯一则进行灰度值相关相似度约束,去除虚假点的干扰获取满足条件点中心坐标(X1,Y1),然后对下一时刻进行目标提取。由于运动连续性,根据(i-1)和(i-2)时刻该点的运动方向,预判时刻i在图像上的区域,在该区域识别目标点并获得中心坐标。循环上述步骤,顺序遍历所有时刻实现对该点的跟踪识别。目标点识别跟踪流程图如图4所示。

图4 动态目标点识别跟踪过程Fig.4 Tracking process for dynamic targets
3 运动位移测量不确定度评定
3.1 运动位移测量示值误差测试
为验证该方法的动态测量性能,根据《JJF(军工)70-2014运动姿态视觉测量系统校准规范》中运动位移测量误差的校准方法,使用位移标准装置完成位移测量示值误差测试,如图5所示。在位移标准装置的移动平台上固定一个定向反光球,运动位移标准装置带动反光球按给定加速度做加速运动,使最快速度可达5m/s。在加速过程中位移标准装置分别在0mm、1000mm、3000mm、5000mm四个位置处输出外触发信号,触发立体视觉动态测量系统进行同步测量,分别记录位移标准装置的输出值和立体视觉动态测量系统的测量值。完成一次测量后,位移标准装置回到0mm位置,重复测量6次。将位移标准装置的输出值作为运动位移参考值,取6次立体视觉动态测量系统测量值的平均值作为运动位移测量值。运动位移测量误差为运动位移测量值减去运动位移参考值之差,取误差中最大值作为立体视觉动态测量系统的运动位移测量示值误差[7]。运动位移测量示值误差测试结果如表1所示,根据表中结果按上述方法计算可得立体视觉动态测量系统的运动位移测量示值误差为1.609mm。

图5 动态测量系统校准方法Fig.5 Calibration method for dynamic measurement system
3.2 测量模型
测量过程中,立体视觉测量系统和位移标准装置分别测量并记录运动位移值和运动位移标准值建立测量模型
ΔL′=L′-L′s
(8)
式中:ΔL′——位移测量误差;L′——位移测量值;L′s——位移标准值。
3.3 不确定度来源
标准不确定度分量来源和说明如表2所示。

表2 标准不确定度分量来源和说明Tab.2 Sourceandexplanationofstandarduncertaintycomponents序号不确定度分量符号及名称符号不确定度分量名称评定方法1u1测量重复性A类评定2u2外触发同步信号延迟误差B类评定3u3位移标准装置读数B类评定4u4位移标准装置偏离标准温度B类评定5u5位移传感器与位移标准装置热膨胀系数差B类评定
3.4 标准不确定度分量评定
3.4.1测量重复性引入的标准不确定度分量u1
采用标准不确定度A类评定方法评定。在系统加速度为5m/s2条件下,经过1s后速度能够达到5m/s,此时对应的位移值为2.5m,因此以2500mm位置为例开展不确定度分析,对该校准点位进行10次重复测量,测量结果如表3所示。

表3 重复测量结果Tab.3 Repeatedmeasurementresultmm校准点测量值25002501.2152500.6122500.8182500.4582498.7982499.6982501.0252501.2122501.1982501.374
得到实验标准偏差s为0.817mm,此项不确定度分量为
u1=s=0.817mm
(9)
3.4.2外触发同步信号延迟引入的不确定度分量u2
单次触发测量延时误差Δt在100μs以内,速度v按5000mm/s计,由此引入的标准不确定度分量按B类评定方法计算
u2=v×Δt
(10)
u2=5000×0.1×10-3=0.500mm
3.4.3运动位移标准装置引入的不确定度分量u3

(11)
3.4.4 运动位移标准装置偏离标准温度引入的不确定度分量u4
(12)
3.4.5 运动位移标准装置与位移传感器材料热膨胀系数差引入的不确定度分量u5
当校准温度偏离标准温度时,位移标准装置与位移传感器由于材料热膨胀系数不同也会引入不确定分量,由于所选用的位移传感器与位移标准装置材料相同,且采用贴附安装方式,可以认为两者热膨胀系数相同,因此,此项误差可忽略。
3.4.6合成标准不确定度的计算uc
各标准不确定度分量之间彼此相互独立,合成标准不确定度为
(13)
3.4.7扩展不确定度U
取包含因子k=2,则扩展不确定度为
U=kuc=2×0.96=1.92mm
(14)
对原始数据依据格拉布斯准则剔除异常值后,以各校准点多个测量结果的平均值作该校准点的测量值,以各校准点测量误差的最大值作为运动姿态视觉测量系统的位移测量误差。测量系统运动位移的最大测量不确定度为1.92mm,可知该方法能够获得较高精度的点位、速度、加速度等运动参数,用以满足天线展开动态运动可靠性分析的测量需求。
4 现场试验验证
某型桁架式单侧展开网状天线,仅需1.6s便可从收拢状态展开到至展开状态。针对该型天线地面模拟展开试验,采用上述设计方案对网面上层关键关节点(21个)的展开运动过程进行了测量。测量系统以300fps(帧/S)的速度进行双相机同步动态采样,测量时间为5s,除去起始的等待时间,有效运动为1.5s,共400幅图像,每幅图像采样点个数为21个。通过三维重构获得了各点的三维空间运动轨迹、速度、加速度以及面型数据,其中各点的运动轨迹图如图6所示,某点的速度曲线如图7所示。
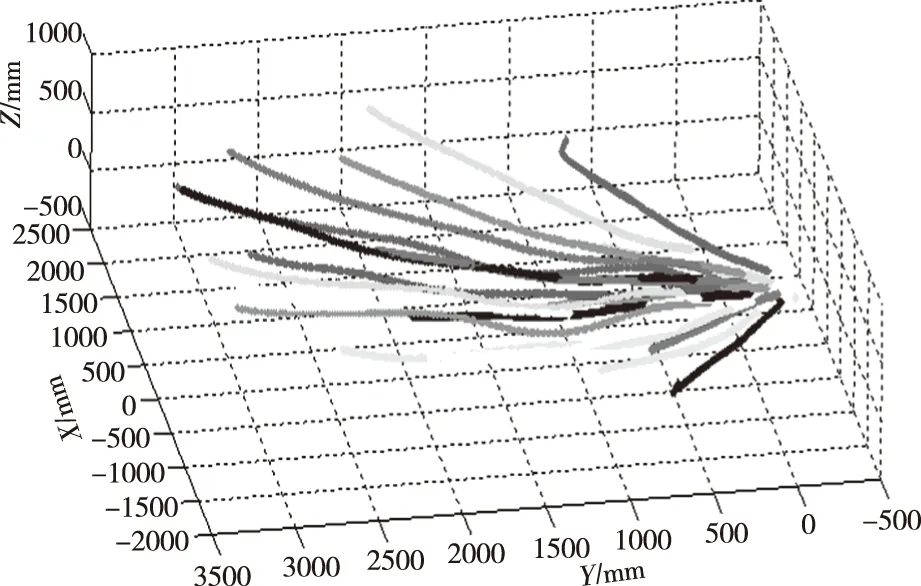
图6 测量点运动轨迹图Fig.6 Trajectory of measuring points
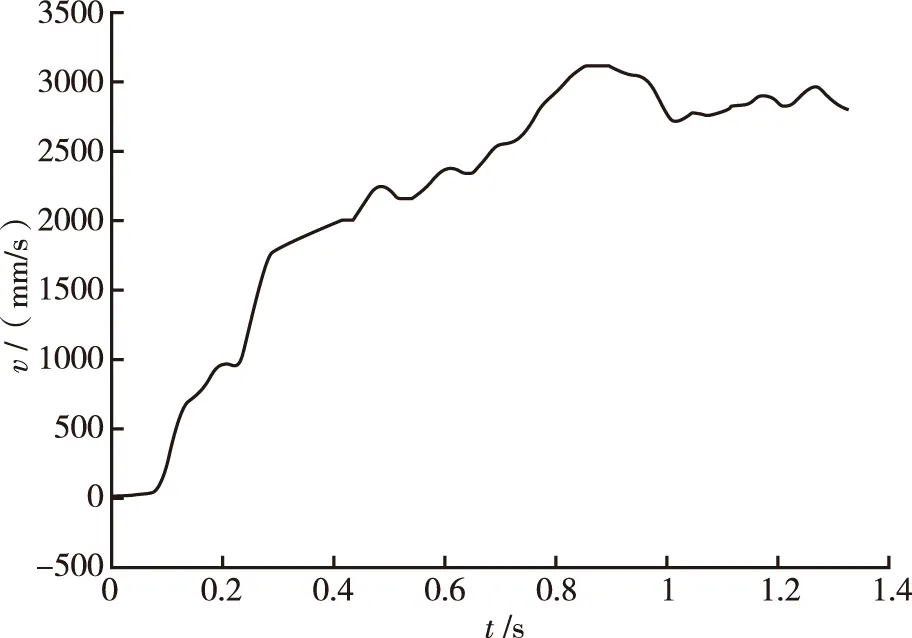
图7 单点运动速度曲线Fig.7 Speed curve of single point
5 结束语
本文针对星载天线地面展开试验,运用双目视觉测量原理开展了天线展开动态测量技术的研究。采用基于标准长度的相机外参现场标定方法,有效解决了大视场范围的视觉外参标定问题。利用动态多目标点识别跟踪方法,能保证观测点序号前后一致性,准确获得各点的连续运动轨迹。通过实验室校准方法验证了测量系统的运动位移测量精度,现场试验验证了各关键技术,获得了多点目标的运动轨迹、速度、加速度以及面型数据,测量结果与运动仿真理论结果吻合,该技术可应用于天线展开过程的动态测量,为天线展开动力学分析和可靠性分析提供数据参考。
猜你喜欢
基层中医药(2021年12期)2021-06-05 06:56:26
小哥白尼(趣味科学)(2020年3期)2020-07-27 01:44:42
汽车维修与保养(2020年11期)2020-06-09 05:42:16
智族GQ(2019年9期)2019-10-28 08:16:21
英美文学研究论丛(2018年1期)2018-08-16 03:00:06
军营文化天地(2018年2期)2018-04-20 07:08:03
纺织科学研究(2017年6期)2017-07-03 12:14:15
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
创新作文(小学版)(2016年10期)2016-11-11 05:45:17
光学精密工程(2016年3期)2016-11-07 09:03:34
