基于交通流模型的快速路交通安全特性分析
2021-01-07 02:05:36赵西龙
公路交通技术 2020年6期
陈 珍,赵西龙,刘 刚
(1.招商局重庆交通科研设计院有限公司,重庆 400067; 2.招商局公路网络科技控股股份有限公司,重庆 400067)
快速路是城市交通中非常重要的运输通道,近年来迅速增加的交通量使得快速路上安全行驶问题越来越突出,对快速路的交通流安全特性分析引起了广大学者和工程技术人员的广泛关注[1]。
裴玉龙等[2]针对快速路出入口最小间距问题进行了计算研究,提出了相对于规范值的出入口最小间距推荐值,从而有利于进一步提升快速路出入口的交通安全。章锡俏等[3]针对长春中东部快速路交通大数据进行了深入分析,得出快速路非必需短距离出行比例过大是造成交通拥堵的主因的相关结论。刘芳丽等[4]考虑降雨天气,针对车速离散性问题,通过城市快速路实测气象交通数据研究了降雨量、交通流量以及平均车速三者的内在关联性,指出降雨将会严重影响城市快速路的车速离散型,从而诱发较大的安全隐患。林奕钦等[5]针对快速路行车安全的可变限速问题,应用碰撞时间特性提出了动态的可变限速阈值预测模型,并用于分析福州市三环快速路案例。邵源等[6]针对道路交通安全主动管理策略进行了研究,对照分析了道路交通事故数据,并以深圳市道路交通安全管理为实例,提出了安全管理策略。傅成红等[7]应用交通流中观模型对福州快速路系统进行了仿真分析,并通过DynuStudio仿真软件进行了实例验证,所得成果可从整体上把握快速路的运行情况,精确分析快速路交通安全特性。周颖等[8]针对城市快速路匝道减速车道的驾驶行为,应用统计学分析方法对不同驾驶经验人的驾驶行为进行了统计分析,其结果为快速路减速车道参数设计和交通安全管理提供了理论基础。刘莹莹等[9]针对快速路车速离散问题,应用车速方差指标进行了统计分析,并以上海车牌识别系统采集得到的数据进行了实证。
综上分析,虽然现有研究针对快速路安全问题研究较多,但针对快速路匝道需求对交通安全特性影响的研究较少,为此,本文采用交通流模型,针对快速路匝道需求对交通流安全特性的影响开展研究。
1 车辆轨迹数据获取
1.1 轨迹数据提取
车辆轨迹数据是交通流跟驰模型参数标定的基础数据,通过交通视频进行数据采集,然后应用图像处理方法提取车辆轨迹数据,是车辆轨迹数据获取的重要途径。目前,基于视频图像处理研究车辆轨迹提取方法的文献较多,其中文献[10]对车辆轨迹提取与优化进行了深入研究,车辆轨迹提取效果较好。为此,本文借鉴其研究成果,对采集到的西安市快速路交通视频数据进行车辆轨迹提取。
应用计算机视觉中的Yolo3算法[11]和KCF算法[12]进行车辆轨迹提取。令s表示交通视频图像中的某一帧,T表示帧中的轨迹集,即T={Ti,i=1,2,…,p},N表示未匹配检测结点集,即N={Nj,j=1,2,…,q}。在轨迹集T中,Ti可表示为:
(1)

应用目标框交叠率mji计算目标检测与轨迹预测之间的关联性,即
(2)

那么,通过Yolo3算法和KCF算法的车辆轨迹提出步骤具体为:首先,针对采集的交通视频图像,应用Yolo3算法对车辆进行检测,得到N={Nj,j=1,2,…,w},通过图像处理技术中的感兴趣区域(ROI)运算,去除部分误检测,对N进行修正为N={Nj,j=1,2,…,q},q≤w。然后,基于以往轨迹数据T={Ti,i=1,2,…,p},应用KCF算法对车辆轨迹进行预测,以此得到轨迹的预测结点,并通过公式(2)计算交叠率mji。最后,基于匹配条件[10]对检测结果与以往轨迹数据进行验证,得到车辆轨迹曲线,其中相邻帧中的轨迹曲线为折线。
1.2 轨迹数据优化
应用Savitzky-Golay滤波器对1.1节得到的局部折线轨迹进行平滑处理,即轨迹数据优化。Savitzky-Golay滤波器为一种典型的低通滤波器,可较好解决数据平滑去燥的问题,其原理具体如下。
令x(i)(i=-m,…,m)为一组数据,应用n阶多项式(2m+1>n)对数据进行拟合运算,计算公式为:
(3)
式中:pi为数据i的拟合结果;bk表示第k个拟合系数。
多项式n的残差平方和E的计算公式为:
(4)
令公式(4)中∂E/∂bk=0,则
(5)
对公式(5)进行简化计算,可以得到:
(6)
令矩阵A为:A=(aik)(2m+1)×(n+1),ait=ik,并用矩阵B表示ATA,那么
(7)
根据矩阵特性,设定如下矩阵:
(8)
那么
(9)
在公式(9)中,H矩阵中第一行向量即为计算得到的卷积系数,其值与n和m有关,与输入的数据x(i)无关。因此,应用Savitzky-Golay能够对检测到的轨迹数据进行平滑优化处理,使得处理后的车辆轨迹数据更加平滑,精确度更高,以方便交通流跟驰模型的标定。
2 交通流跟驰模型标定
2.1 跟驰模型
国内学者姜锐[13]针对交通流跟驰行为建模问题,提出了全速度差模型FVD(Full Velocity Difference),FVD模型广泛应用于交通流跟驰建模与特性分析中,模型公式如下:
(10)
(11)
式中:l为车长,取为5 m;b和β为模型常量参数;v0为最大限速值。
2.2 模型标定
应用获取的车辆轨迹数据对FVD模型进行模型参数标定,使得标定后的模型具备模拟快速路车流特性的能力。用zn(t)表示车辆n在当前时刻t的位移xn(t)和速度vn(t),用ξn(t)表示后车对前车行驶轨迹的观测与估计[14],则
ξn(t)=zn-1(t)
(12)
车辆n的跟驰行为可表述为:
(13)
则系统变化方程为:
(14)

(15)
式中:g表示目标函数,其表达式如下:
(16)

在公式(16)的基础上,结合遗传算法对目标函数进行迭代优化运算,最终得到FVD模型参数标定结果,如表1所示。
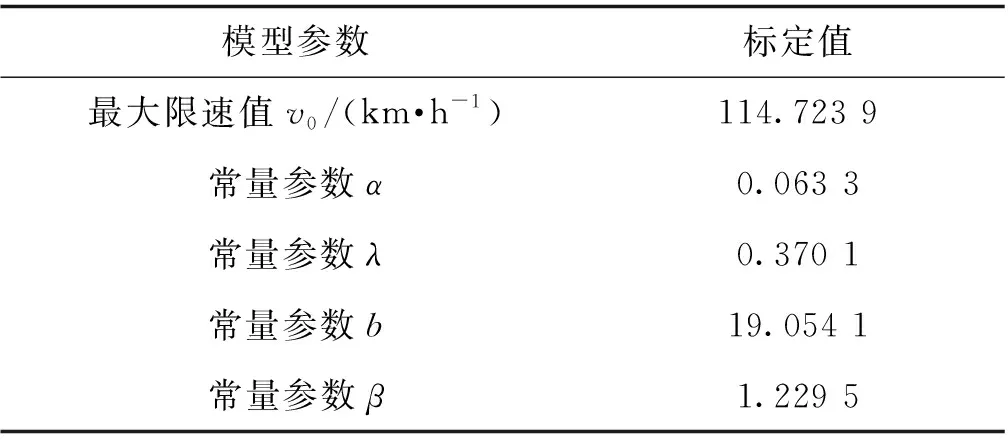
表1 模型参数标定结果
3 交通流安全仿真分析
3.1 安全评价指标
基于跟驰模型进行数值仿真试验,得到快速路匝道区域的交通流仿真结果,而安全评价指标能够将交通流仿真结果转变为安全风险水平,常用的交通流安全风险评价指标计算如下[15]:
(17)
式中:Stet表示TET安全风险指标;Stit表示TIT安全风险指标;n表示车辆;t表示时刻;N为总车辆数;T为总时刻数;Δt为仿真步长;δ为碰撞时间阈值,可分别取值为1 s、2 s和3 s。
由公式(17)可以看出,TET安全风险指标Stet从数量层面体现了碰撞事故的安全风险水平,而TIT安全风险指标Stit则从质量上体现了碰撞事故安全风险程度。
3.2 数值仿真与结果分析
1) 数值仿真设计
本文交通流安全水平仿真试验采用基于跟驰模型的数值仿真试验,仿真试验在Matlab软件中进行,数值仿真步长取0.1 s,仿真路段为长度10 km的快速路,且在4 km处有一上匝道,匝道车流的汇入对主路车流的交通流安全风险造成一定影响,基于数值仿真结果,应用公式(17)中的安全评价指标,分析不同主路需求、匝道需求情况下的交通流安全特性。
在仿真试验中,整个仿真时间为1 h,设定主路需求为1 200 veh/h和1 600 veh/h,在每种主路需求情况下,将匝道需求从100 veh/h逐渐增大至800 veh/h,考察匝道需求增大过程中的交通流安全特性的变化情况。在每种主路需求下,以匝道需求为100 veh/h的情况为基准,分别计算不同匝道需求下的交通安全风险水平相较于基准情况的变化百分比,以进行定性与定量化分析。
2) 主路与匝道交通流安全风险分析
基于以上数值仿真设计与安全评价指标,主路需求分别为1 200 veh/h和1 600 veh/h时,交通流安全风险分析结果分别如表2、表3所示。在表2、表3中,表中的数值为相比于匝道基准需求100 veh/h时的情况,不同匝道需求时的交通安全风险增加百分比,比如在主路需求为1 200 veh/h时,当δ取1 s时,匝道需求800 veh/h相比基准需求100 veh/h时,安全风险将增加12.514倍。由此可知,随着匝道需求的逐渐增加,交通流安全风险呈现逐渐增加的趋势,体现了匝道车流越多,对主路造成的安全风险隐患越大。
为了更加直观地看出安全风险水平增加百分比的变化情况,根据表1、表2的计算结果,绘制安全风险增加百分比曲线,分别如图1、图2所示。从图1、图2中可以看出,TET安全风险指标表征的安全风险增加百分比随着匝道需求的增加而较平稳上升,说明了匝道需求的增大使得安全碰撞风险隐患在数量上逐步上升。TIT安全风险指标表征的安全风险增加百分比在匝道需求为500 veh/h处有明显转折,即当匝道需求增大至500 veh/h时,安全风险增加百分比发生了较大的转变,表明当匝道需求增大至500 veh/h时,交通事故碰撞的安全风险隐患在严重程度上出现明显转折。据此,从TIT安全风险指标上看,为控制安全风险隐患,匝道需求应当控制在500 veh/h以下。
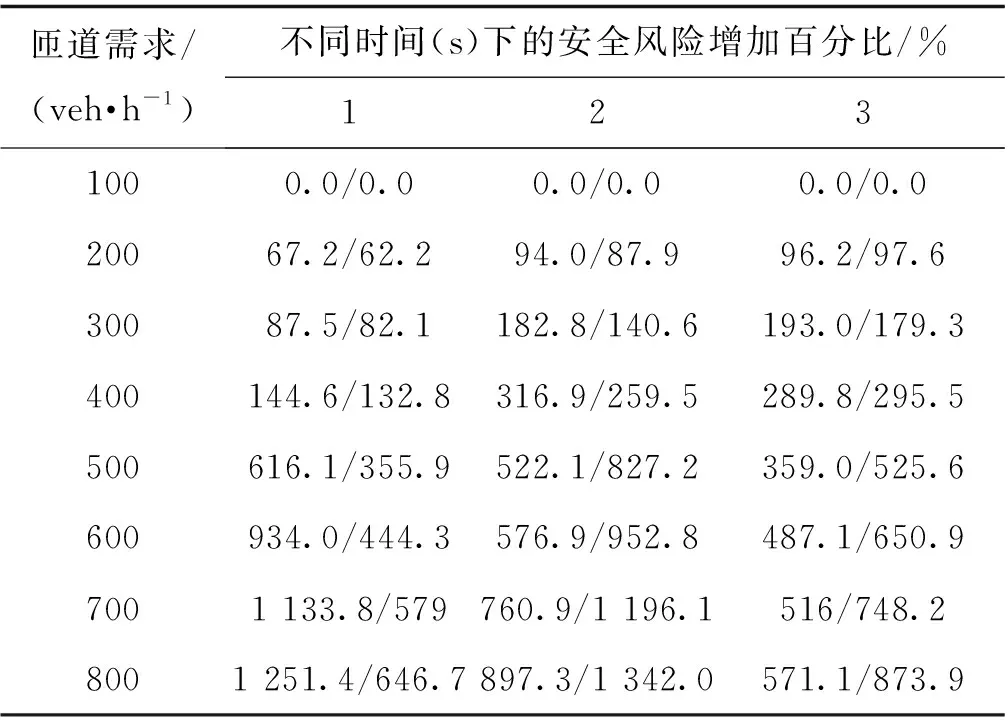
表2 交通流安全风险对比(主路需求为1 200 veh/h)
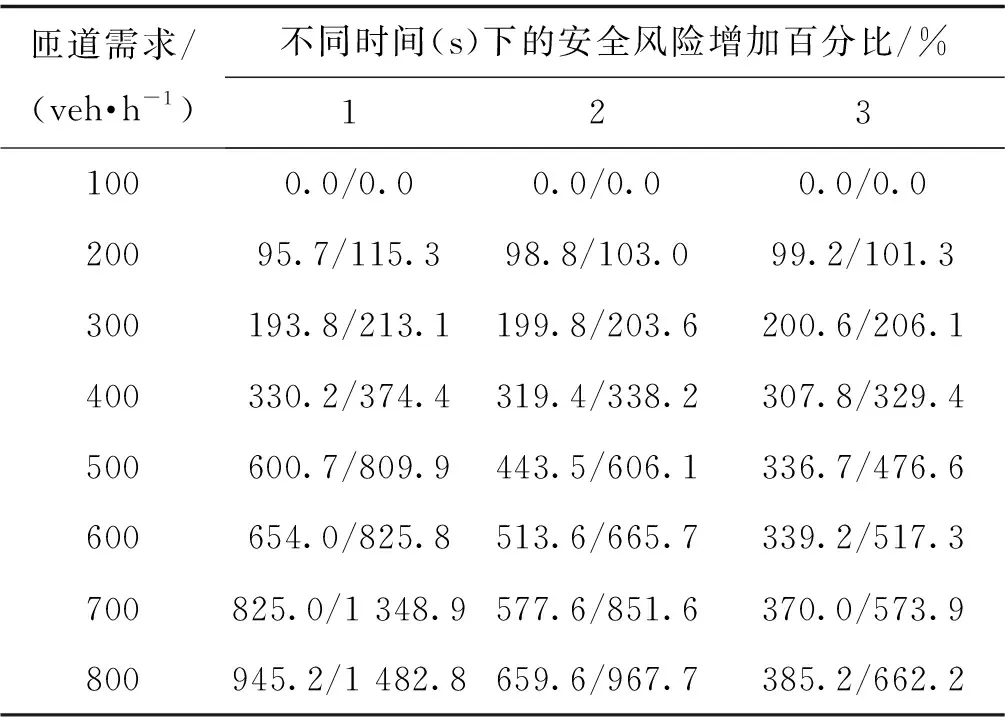
表3 交通流安全风险对比(主路需求为1 600 veh/h)
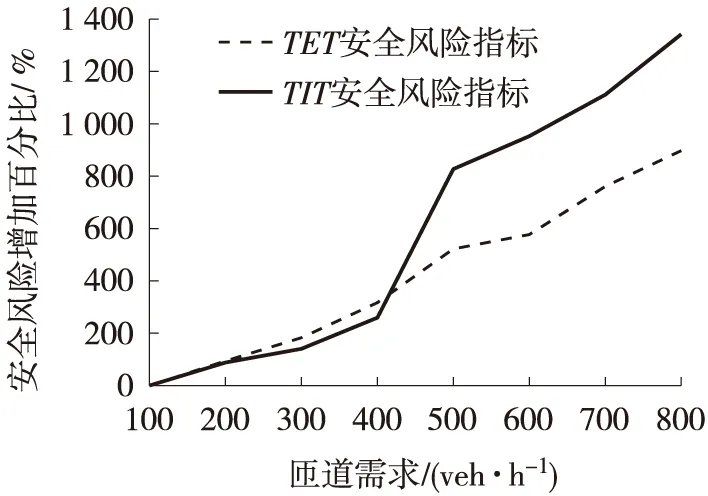
图1 安全风险曲线(主路需求1 200 veh/h)
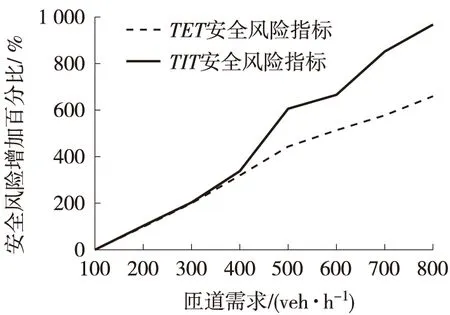
图2 安全风险曲线(主路需求1 600 veh/h)
4 结束语
本文从交通流轨迹数据采集、交通流跟驰模型标定、数值仿真分析等几个方面,针对快速路匝道需求对交通流安全风险水平的影响开展了研究,发现在主路需求一定的情况下,匝道需求量的多少会对交通流安全风险水平产生不同的影响,匝道需求量越大,交通流安全风险越高,交通流安全风险隐患在TET和TIT指标表征的风险数量上随着匝道需求的增加呈现出较平稳的增长趋势,而在TET和TIT指标表征的风险程度上存在明显转折点,即当匝道需求增加到500 veh/h时,交通流安全风险隐患程度明显加大。
猜你喜欢
中国交通信息化(2022年7期)2022-10-27 06:35:38
中国交通信息化(2020年4期)2021-01-14 01:31:16
上海公路(2019年1期)2019-06-18 11:05:06
中国交通信息化(2018年11期)2018-03-01 05:43:42
西南交通大学学报(2016年3期)2016-06-15 20:29:35
中国工程咨询(2016年1期)2016-02-14 06:47:44
武汉理工大学学报(交通科学与工程版)(2015年5期)2015-12-05 02:19:37
数学年刊A辑(中文版)(2014年1期)2014-10-30 01:48:12
城市道桥与防洪(2014年8期)2014-02-27 07:28:25
城市道桥与防洪(2013年8期)2013-03-11 15:18:11