基于轨迹规划的自动驾驶控制策略研究
2021-01-07 06:25宁作涛
汽车电器 2020年12期
刘 伟, 宁作涛
(东软睿驰汽车技术有限公司, 辽宁 沈阳 110179)
汽车电子化、信息化为汽车带来了巨大的变革,不断提升涉及舒适、安全、节能、操纵稳定性等汽车性能,随着电子信息、人工智能等领域相关技术的发展和在汽车电子领域的应用,更多丰富的智能网联功能在汽车中集成[1]。自动驾驶涉及技术领域广泛,随着迫切的市场需求,各类传感器、底盘线控、域控制器技术日趋成熟,车规级芯片算力的提升、感知、决策等算法的迭代,使自动驾驶产品功能日益丰富、功能不断升级[2-3]。本文在自动驾驶轨迹规划完成的条件下,研究自动驾驶汽车的纵/侧向控制策略,充分利用全局路径规划提供的轨迹信息,完成自动驾驶汽车控制策略的开发,为更复杂环境下自动驾驶技术的研究提供基础,实现在轨迹规划指导下的自动驾驶功能。通过在封闭道路中的自动驾驶测试,验证轨迹信息利用的有效性,以及本文控制策略的轨迹跟随效果。
1 自动驾驶功能架构
自动驾驶系统中,全局路径规划模块根据行驶目标和车辆当前位置,调用地图数据规划出全局路径;在自动驾驶功能运行过程中,局部轨迹根据车辆实时运行的高精度定位数据,提取模块提取前方车道级行驶轨迹;纵侧向控制模块根据前方行驶轨迹,规划车辆控制动作,由控制执行模块控制车辆实现车辆的自动驾驶功能[4-5]。自动驾驶功能流程如图1所示。

图1 自动驾驶功能流程示意图
本文重点研究局部轨迹提取以及车辆纵/侧向决策控制算法,涉及如何充分提取和利用局部轨迹信息,如何实现纵/侧向控制及解决纵向、侧向控制间的耦合。
2 自动驾驶局部轨迹提取
在全局路径规划的基础上,自动驾驶局部轨迹提取的目标在于:根据车辆当前位置,在全局路径中截取一段轨迹,并提取该段轨迹中用于指导当前纵/侧向控制的相关信息[6-7]。本文使用的全局路径如图2所示。
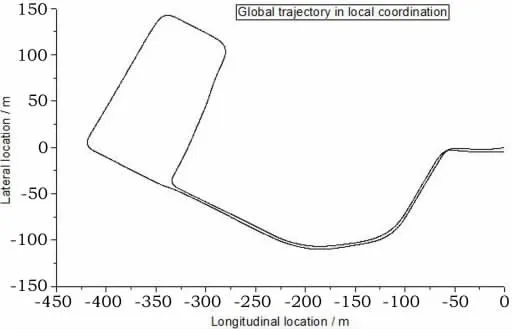
图2 自动驾驶全局路径示意图
局部轨迹截取范围为当前车辆位置以及前方预瞄点范围的轨迹,预瞄点在全局路径上,距离当前车辆位置的长度取决于当前车速和设置的最小预瞄距离,即预瞄距离:

式中:K——预瞄系数,s;Vx——纵向车速,m/s;dmin——预设的最小预瞄距离,s。
dmin用于车速为0时最短预瞄距离的选择,本文道路测试中设置该值为10m。预瞄距离的计算与预瞄点的选择如图3所示,这样就得到了纵/侧向控制所需的局部轨迹。
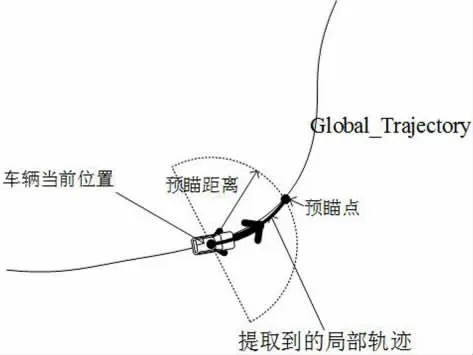
图3 局部轨迹信息的提取
3 纵向控制决策
纵向控制决策用于确定车辆在全局路径中各点处的纵向速度。在纵向速度决策中,综合考虑以下约束[8]:①全局路径起点车速为0m/s,此处车辆起动,并开始自动驾驶任务;②全局路径终点车速为0m/s,此处车辆停止,完成自动驾驶任务;③根据交通规则设定的道路限速Vx-rule_lim,车辆在特定路段行驶时不能超过该限速,在地图数据中提取;④由道路曲率限制的车速Vx-curve_lim,用于满足车辆行驶过程中的侧向加速度限制ay-lim,保证安全性和舒适性,通过下文计算方法获得;⑤由前方目标限制的车速Vx-target_lim,用于保证与前车的安全距离,可通过自适应巡航系统开发中相关方法计算得到[9]。
道路曲率限制的车速需要从路径和轨迹中提取道路曲率,应用海伦公式,采用三点法计算道路曲率Croad[10],道路曲率计算方法如图4所示,进而得到由道路曲率限制下的车速:

首先,通过上述约束,选择各点最小值,作为各路径点初始的纵向速度规划值:

然后设置起始点车速为0,考虑纵向加速度限制,更新路径点纵向速度。

图4 道路曲率计算示意图

使用纵向控制决策方法得到基于图2全局路径的纵向速度规划,以及在与人工驾驶过程中实际车速记录值的对比,纵向控制策略比较好地实现了与人工驾驶一致的纵向速度规划。如图5所示。

图5 自动驾驶纵向控制决策与人工驾驶实际纵向控制车速的对比
4 侧向控制策略
侧向控制策略用于在自动驾驶过程中,侧向控制即车辆转向盘转角的控制。图6为侧向决策相关参数示意图。为保证车辆运动轨迹与局部轨迹提取的轨迹吻合,即使车辆能够按照规划轨迹行驶,在侧向控制策略中,综合考虑以下约束[11]。
1) 侧向加速度限制,该项约束在纵向速度规划中已经初步考虑,保证车辆在各轨迹段侧向加速度满足安全性、舒适性要求。
2) 当前轨迹点的轨迹曲率1/Rt与车辆运动轨迹曲率1/Rv之间的偏差应尽可能小,车辆运动轨迹曲率由转向盘转角δ、转向系传动比i,通过车辆阿克曼转向关系计算得到。
3) 当前轨迹点Pt与车辆位置Pv的侧向偏差dis_offset应尽可能小。
4) 当前轨迹点的轨迹航向AZMt与车辆当前航向AZMv的偏差azm_offset应尽可能小[12-13]。

图6 侧向决策相关参数示意图
综合上述因素,对于产生的各偏差项使用PID算法决策对应的修正转向盘转角,即车辆在当前轨迹点的转向盘转角决策计算如下:
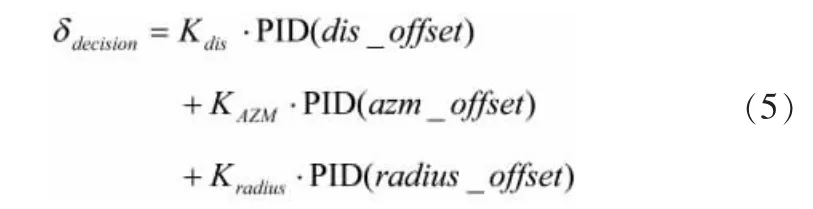
使用侧向控制决策方法在图2全局路径中进行自动驾驶控制,最终决策出的转向盘转角由曲率、航向、位置偏差需求转角构成,各成分侧向控制决策的影响如图7所示。
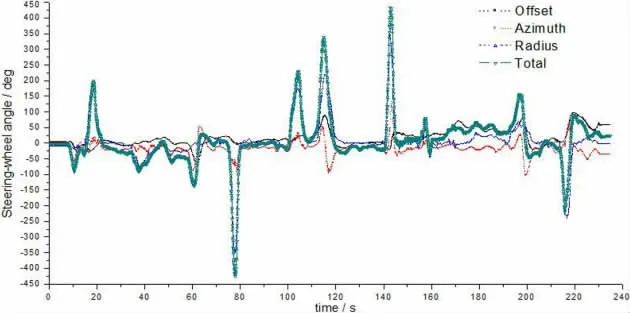
图7 侧向控制策略中成分分析
自动驾驶功能在该全局路径上的转向盘转角决策结果与人工驾驶状态下转向盘转角决策结果对比如图8所示,结果表明本文提出的侧向控制策略能够与人工驾驶较为一致地完成侧向控制输出。
5 轨迹跟随效果
试验平台由具备底盘控制功能的车辆、高精度定位设备、自动驾驶控制系统构成,如图9所示。
将前述轨迹提取、纵侧向控制策略集成到测试车辆中,沿全局路径完成车辆的自动驾驶,并对比分析人工驾驶时车辆行驶轨迹与自动驾驶实际控制的车辆行驶轨迹,如图10所示。

图8 自动驾驶侧向控制决策与人工驾驶实际侧向控制车速的对比

图9 自动驾驶测试平台
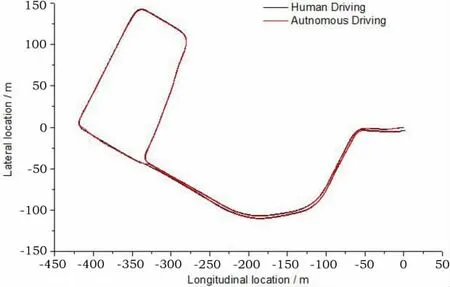
图10 人工驾驶车辆运动轨迹与自动驾驶车辆运动轨迹的对比
6 分析与结论
本文分析了自动驾驶全局轨迹所蕴含信息,研究局部轨迹提取策略,充分应用局部轨迹信息,结合车辆动力学对车辆底盘控制的约束,设计自动驾驶纵/侧向控制策略。在实际道路测试中,本文提供的控制策略能够与人工驾驶一致地完成基于全局路径的自动驾驶功能,很好地跟随规划轨迹,过程中纵向车速规划、转向盘转角规划也与人工驾驶保持了比较高的一致性。试验结果证明本文提供的基于轨迹规划的自动驾驶控制策略,能够达到很好的巡线控制效果,实现预期的自动驾驶功能[14]。
本文提供的控制策略仅考虑静态路径条件下,车辆基本运动控制的实现,在后续研究中,需要关注动态目标的引入[15]对自动驾驶控制策略的影响。
猜你喜欢
时代汽车(2022年17期)2022-09-06
新疆大学学报(自然科学版)(中英文)(2022年3期)2022-06-04
军民两用技术与产品(2022年2期)2022-06-01
机电工程技术(2021年3期)2021-09-10
汽车工程(2021年12期)2021-03-08
学校教育研究(2020年3期)2020-02-18
汽车杂志(2018年6期)2018-06-25
东方教育(2017年19期)2017-12-05
作文周刊·小学一年级版(2017年27期)2017-08-10
计算机辅助工程(2016年3期)2016-08-01