利用光强判别法改进超声光栅测量水中声速实验
2021-01-06 11:31董玮涔何旭东
物理实验 2020年12期
董玮涔,何旭东
(北京师范大学 物理学系,北京 100875)
超声波是频率高于20 kHz 的机械波,它在液体中传播时会造成液体的密度分布不均匀(呈周期性变化). 当光通过时会产生类似于通过透射光栅的衍射现象. 故将超声导致的液体中的“光栅”称作“超声光栅”.
利用超声光栅测量声速,可对液体的一些性质进行研究,如,探究声速与溶液浓度、声速与溶液温度的关系[1],液体体积弹性模量与浓度的关系[2],等等. 因此,利用超声光栅高精度地测量声速就显得尤为重要,文献[3-4]探寻超声腔的结构以减少损耗,拓展测量液体范围,提高精度. 本文设计了利用分光计实现高精度测量液体声速的方法.
1 实验原理
1.1 驻波的形成
假设超声纵波在液体中声强衰减为
If=Ie-ld,
(1)
其中d为声波传播距离,l为与液体有关的衰减系数,在d较小时 (在实验中,水槽长度D=30.00 mm),可以认为e-ld≈1,所以大致认为在传播过程中,波的振幅没有发生改变,只在反射瞬间有振幅的衰减,振幅乘以e-lD. 再考虑在声波反射面上的声强衰减,其反射系数为
(2)
设压电陶瓷发出的初始波为
y=A0cos (ωt-kx),
(3)
设水槽长度为
D=(N+a)Λ,a∈[0,1),N∈Z+.
(4)
其中,Λ为超声波在水中的波长. 考虑无穷多次的反射波的叠加,以及半波损失,计算结果为
yf=A0Asin (kx)cos (ωt-b),
(5)
当ld一定时,b是常数,则
(6)
1.2 光栅衍射
式 (5) 示意图如图1(a) 所示,yf大于0的部分,液体沿正方向移动;yf小于0的部分,液体沿负方向移动.B,D,F处水的密度最大,C,E处水的密度最小. 水密度周期即yf的周期.
本实验中,由式(4)可推知水密度周期为Λ,即超声波在水中的波长.
超声驻波场引起的介质折射率分布可以写成
n(x)=n0+Δncos (kx),
(7)
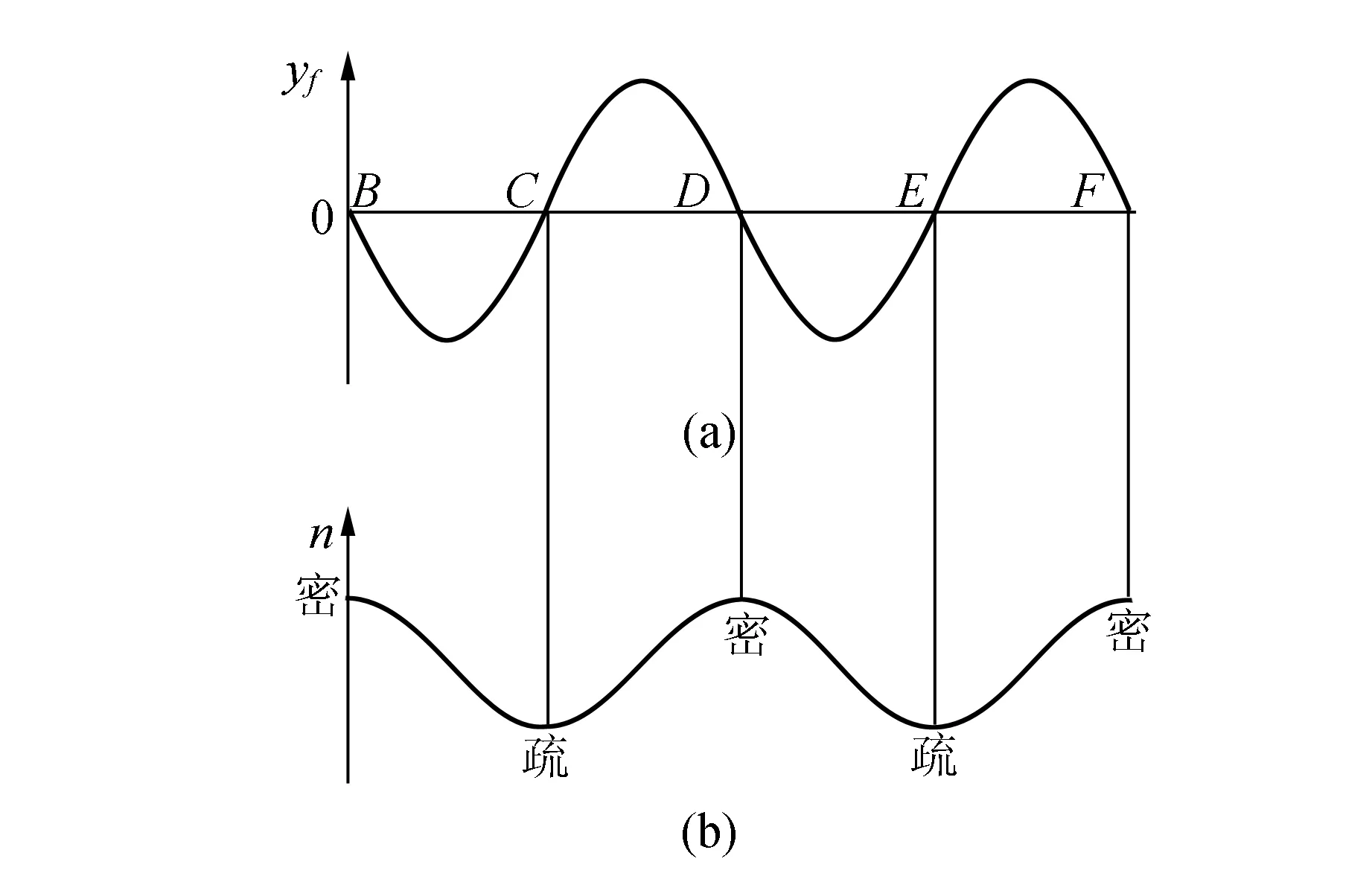
图1 超声光栅衍射原理示意图
在光束近似垂直入射情况下,液体超声光栅实验中的声光相互作用为典型的Naman-Nath衍射[5]. 光栅方程为[6]
dsinθ=jλ,
(8)
其中,光栅常量d=Λ,j为条纹级数,λ为光波长.
测量衍射光对应的衍射角θ即可求出超声波波长,据此求出声速.
2 传统分光计测角法
实验装置示意图如图2所示. 使用信号发生器控制超声水槽中的压电陶瓷调节超声频率,让平行光束垂直超声波传播方向通过水槽,用分光计进行观察与测量. 若超声形成驻波,则可观察到清晰的衍射条纹.
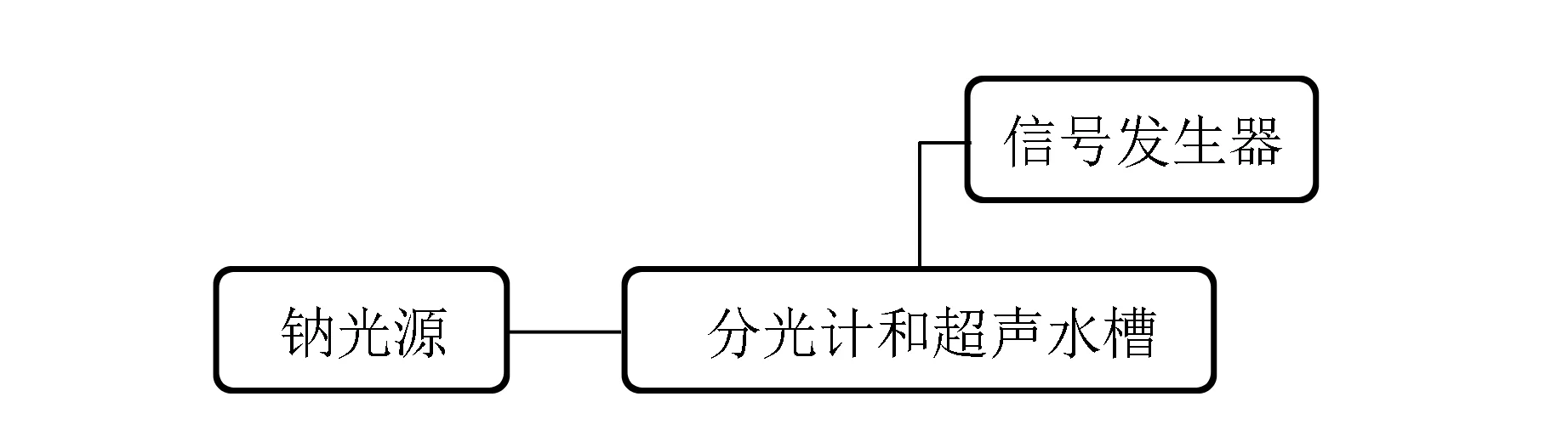
图2 分光计测角法实验装置示意图
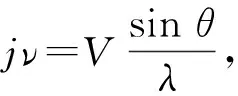
其中V=Λν,即水中的声速,ν是超声波的频率. 实验中,为了提高精度,测量零级条纹左右2条同级条纹. 鉴于分光计有左右2个游标,将2条纹的左游标读数相减除以 2 即为该衍射级次的衍射角,右游标同理. 原始数据如表1所示. 另外,实验用钠光灯,钠光波长λ=589.3 nm,代入公式进行计算.
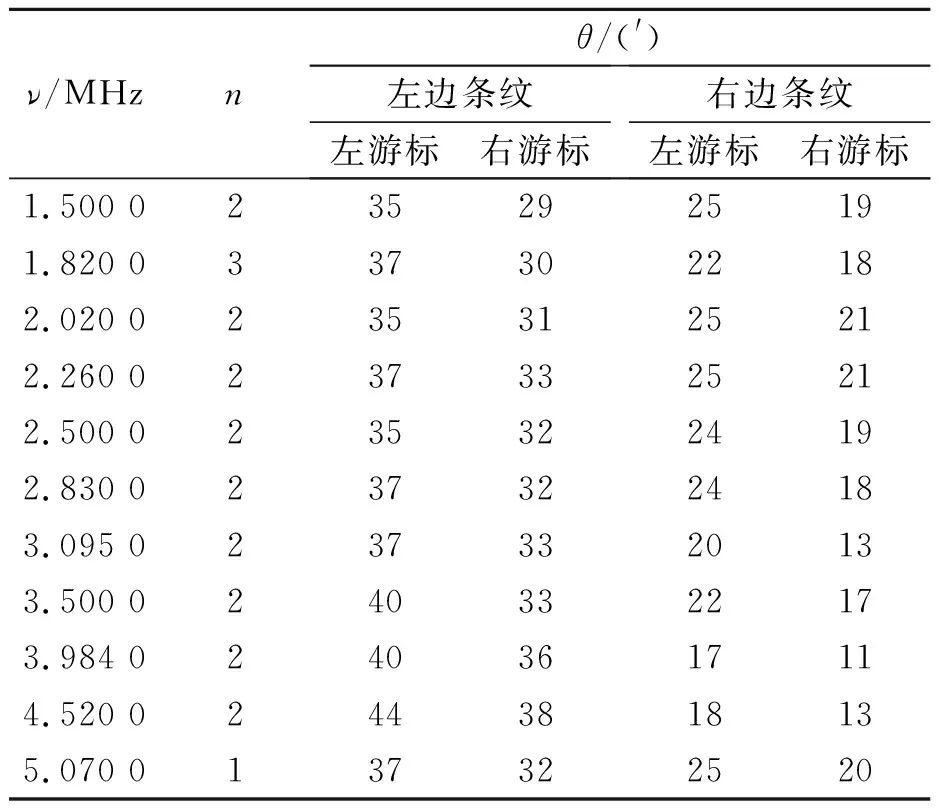
表1 分光计测角法原始数据
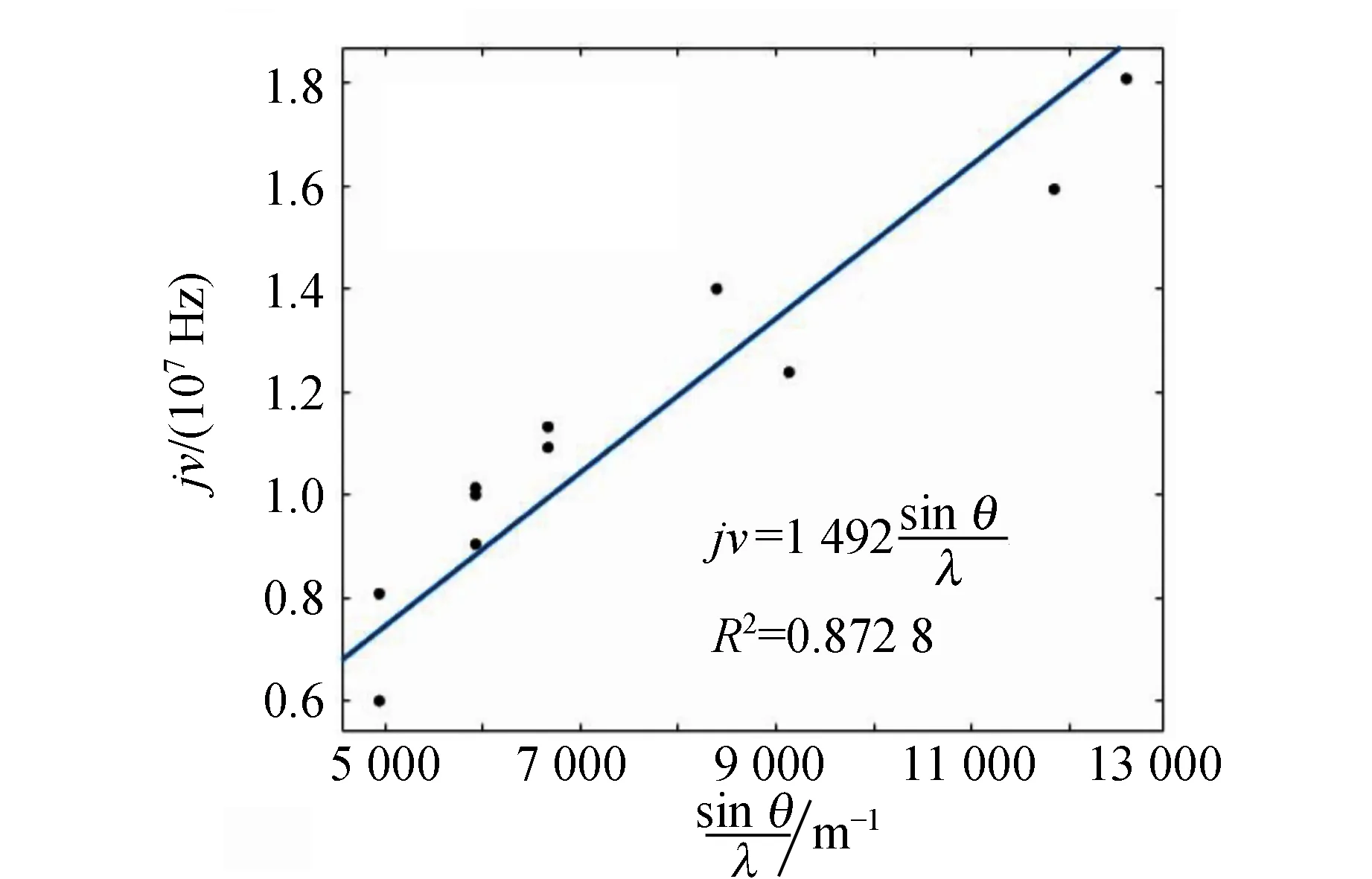
使用Matlab线性拟合,如图3所示,得其斜率即为超声波水中速度
V=1 492(1 386, 1 597) m/s,
式中括号内数据为Matlab给出的置信区间.
图的关系
分别计算出不同频率的超声波对应测量出的声速,最后得出声速极值分别为
Vmax=1 711.9 m/s,Vmin=1 215.5 m/s.
两者相差较大,且斜率置信区间较大,因此试图寻求新的测量方法来得到声速.
3 传统实验的改进
3.1 光强判别法
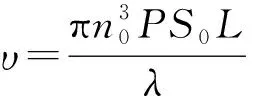
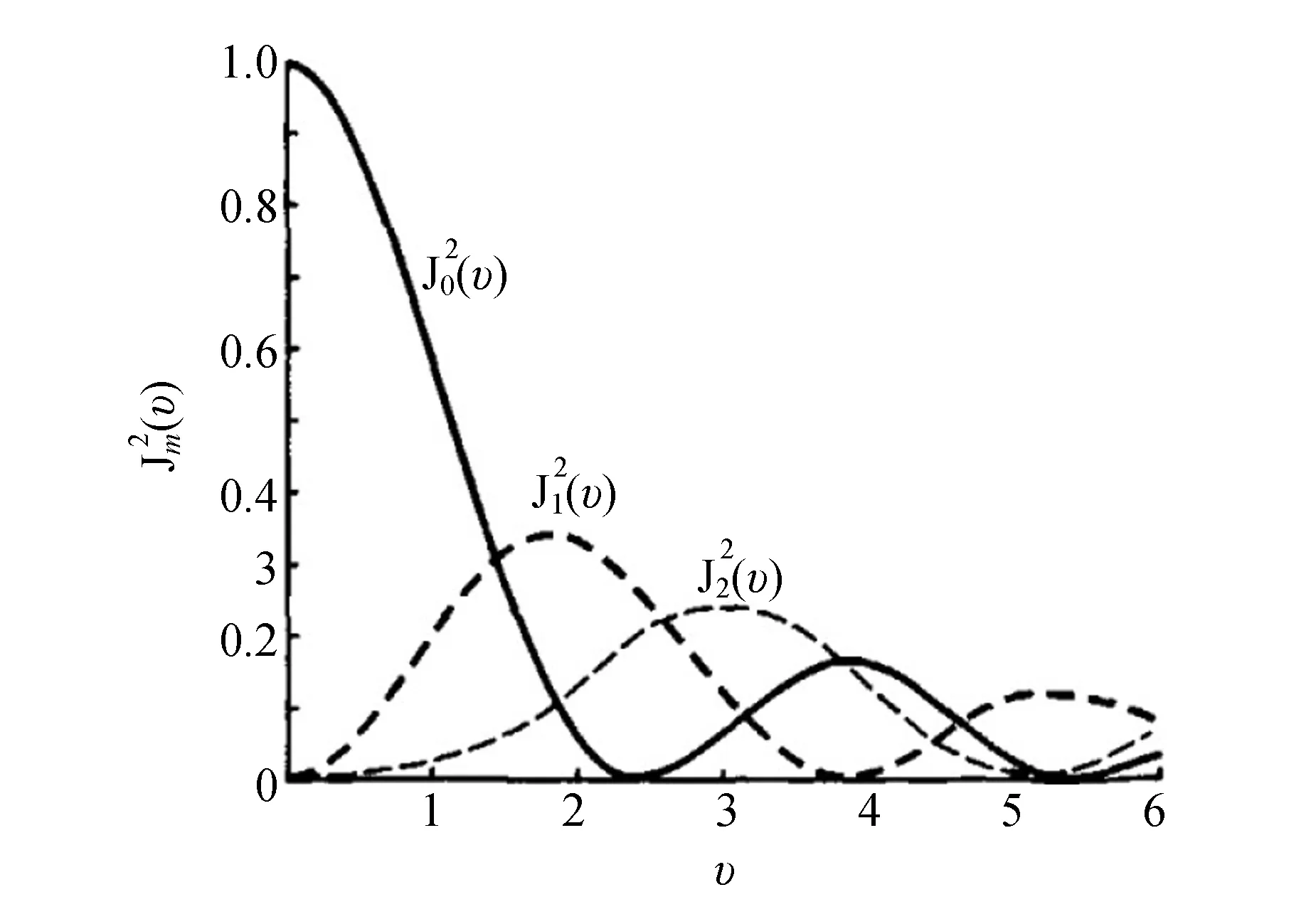
图 的计算曲线[5]
根据式(6), 用Matlab绘图可得A与a的关系见图5. 分析得a为0和1/2时,即pΛ=2D(p∈Z+)时,光强最大.
图5 A与a的关系

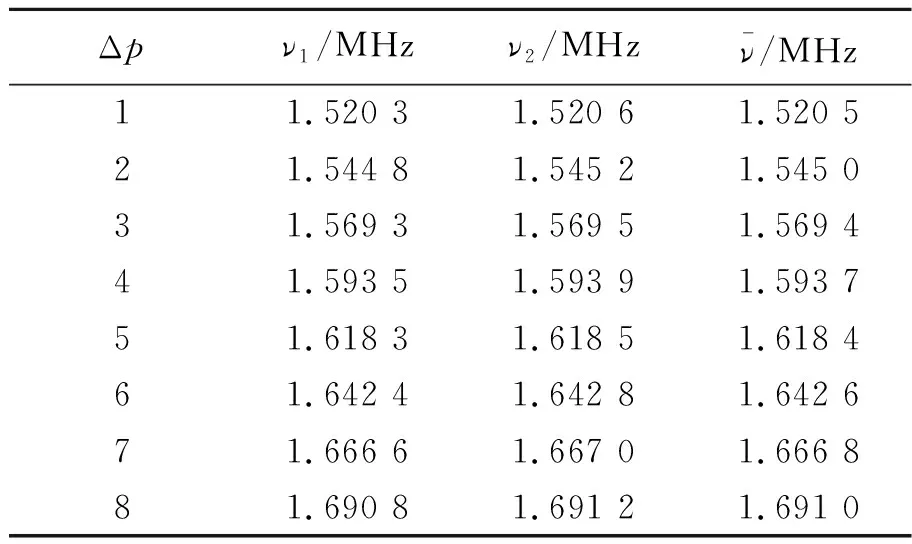
表2 光强判别法原始数据
使用Matlab线性拟合,如图6所示,得其斜率即为超声波在水中的速度.
V=1 462(1 458,1 466) m/s,
对比分光计测角法的结果,可知光强判别法更加精准.
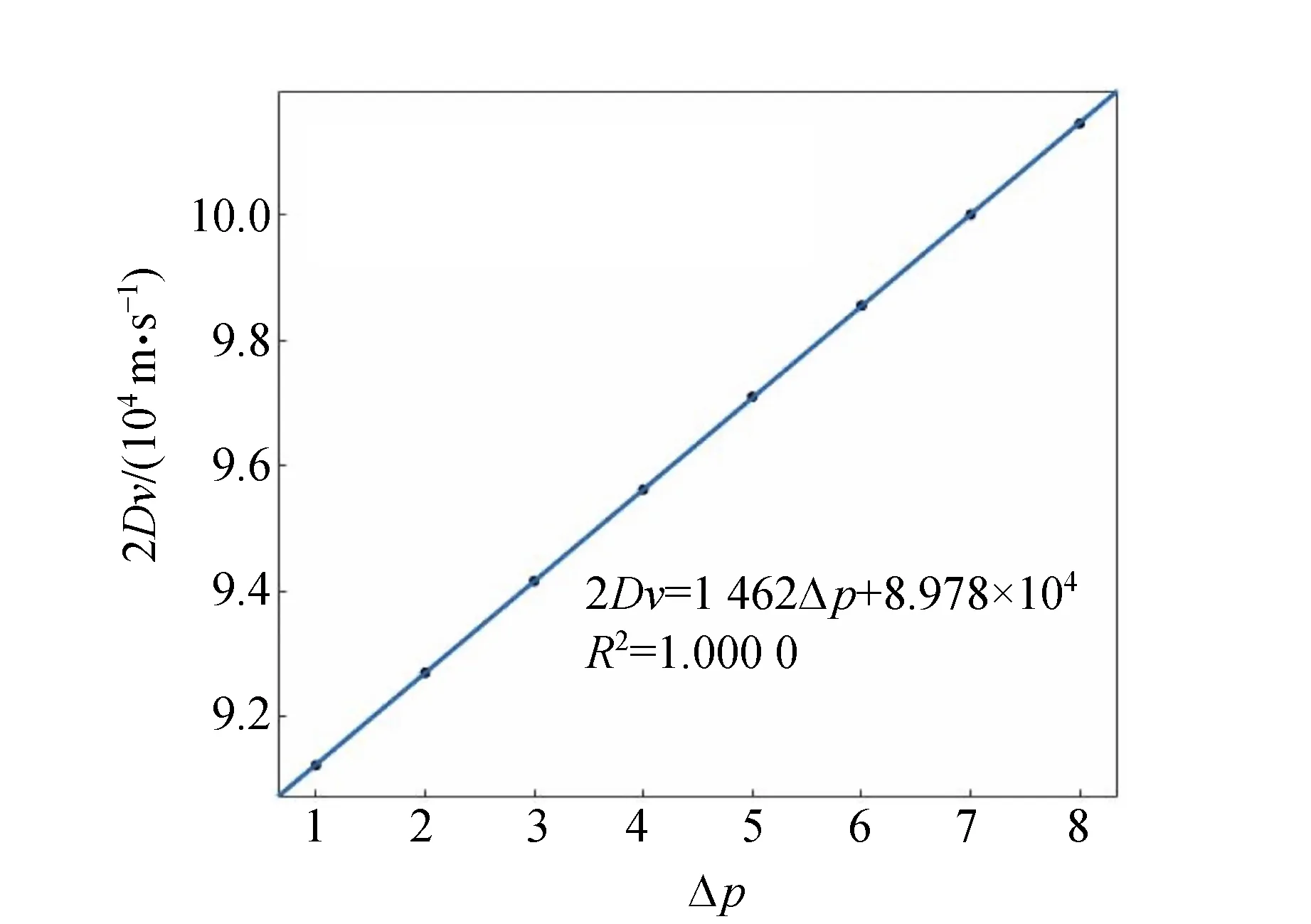
图6 2Dν-Δp的关系
注意:图6中p的定义见式 (4),具体实验中无法得知p的具体数值. 但由于只需求斜率,只需关注p的相对变化Δp,此处令增大超声频率时记录的第1个光强极大处Δp为1,下文同理.
3.2 改进光强判别法
由于肉眼观察不够精准,改进了光强判别法(图7),使用摄像头实时记录衍射图像,并编写LabVIEW程序(图8)来采集数据,LabVIEW运行时截图见图9,其中:摄像头实时记录衍射图像;用LabVIEW来读出光强,控制等时等步长扫频分析条纹光强;去掉0级条纹数据,将其他级衍射条纹光强相加,做其与频率的曲线.
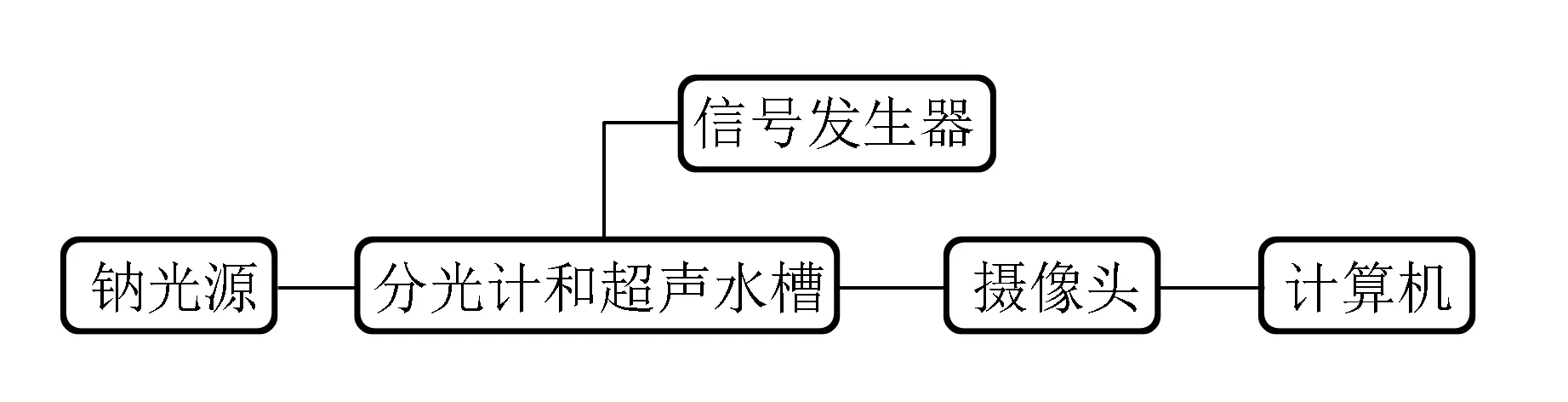
图7 改进光强判别法实验装置示意图
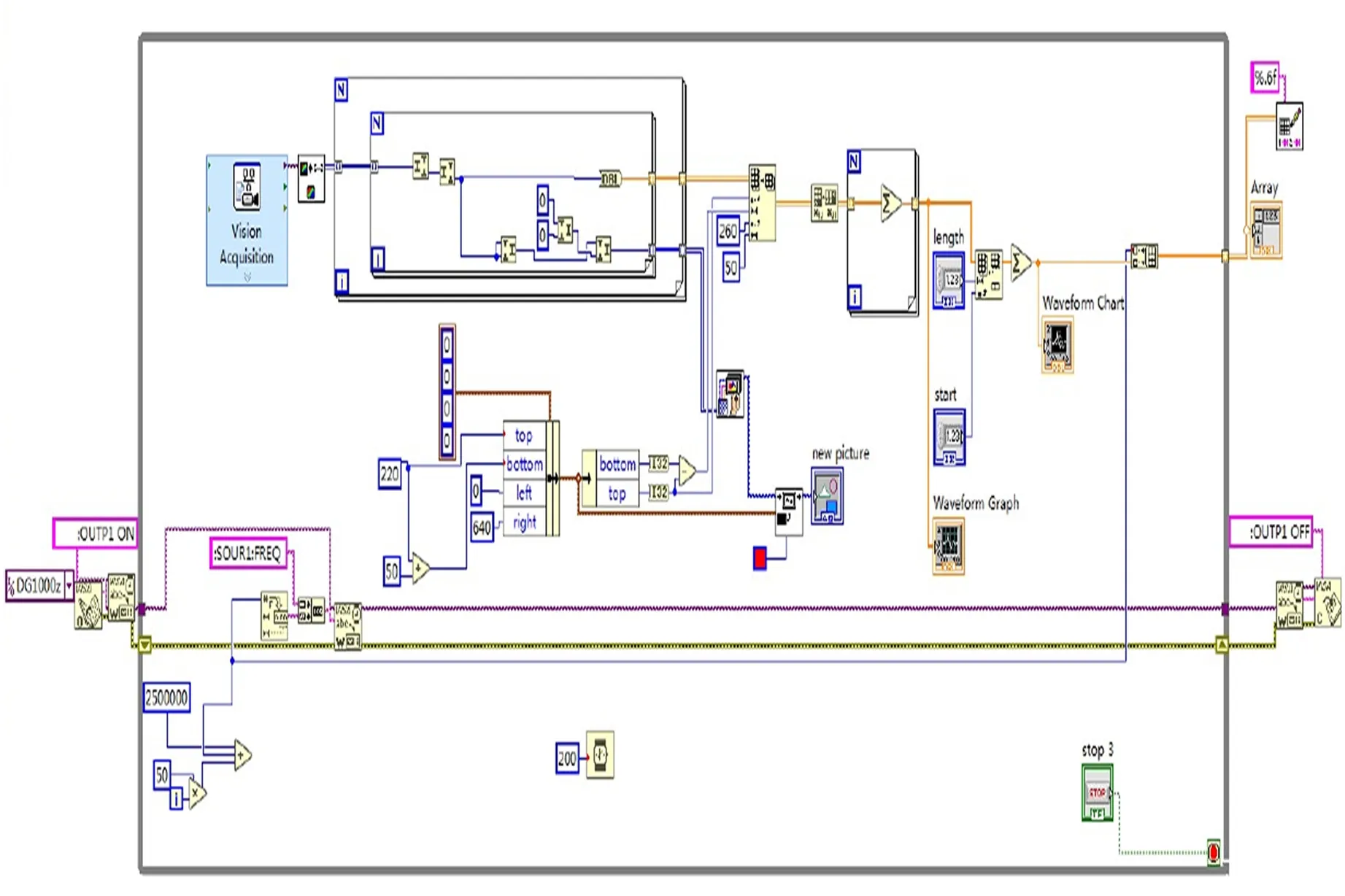
图8 LabVIEW程序框图

图9 LabVIEW运行时截图
导出数据做图10, 由于光强最大处并不足够光滑,采用的处理方法为:选择图10中的一段对于每个峰求得光强为104时对应的2个频率,取其平均值得到光强最大所对应的频率. 原始数据见表3. 处理后做图11,使用Matlab线性拟合得其斜率即为超声波水中速度
V=1 460(1 459, 1 462) m/s,R2=1.0000 .
可以看出改进之后置信区间更小,更精确.
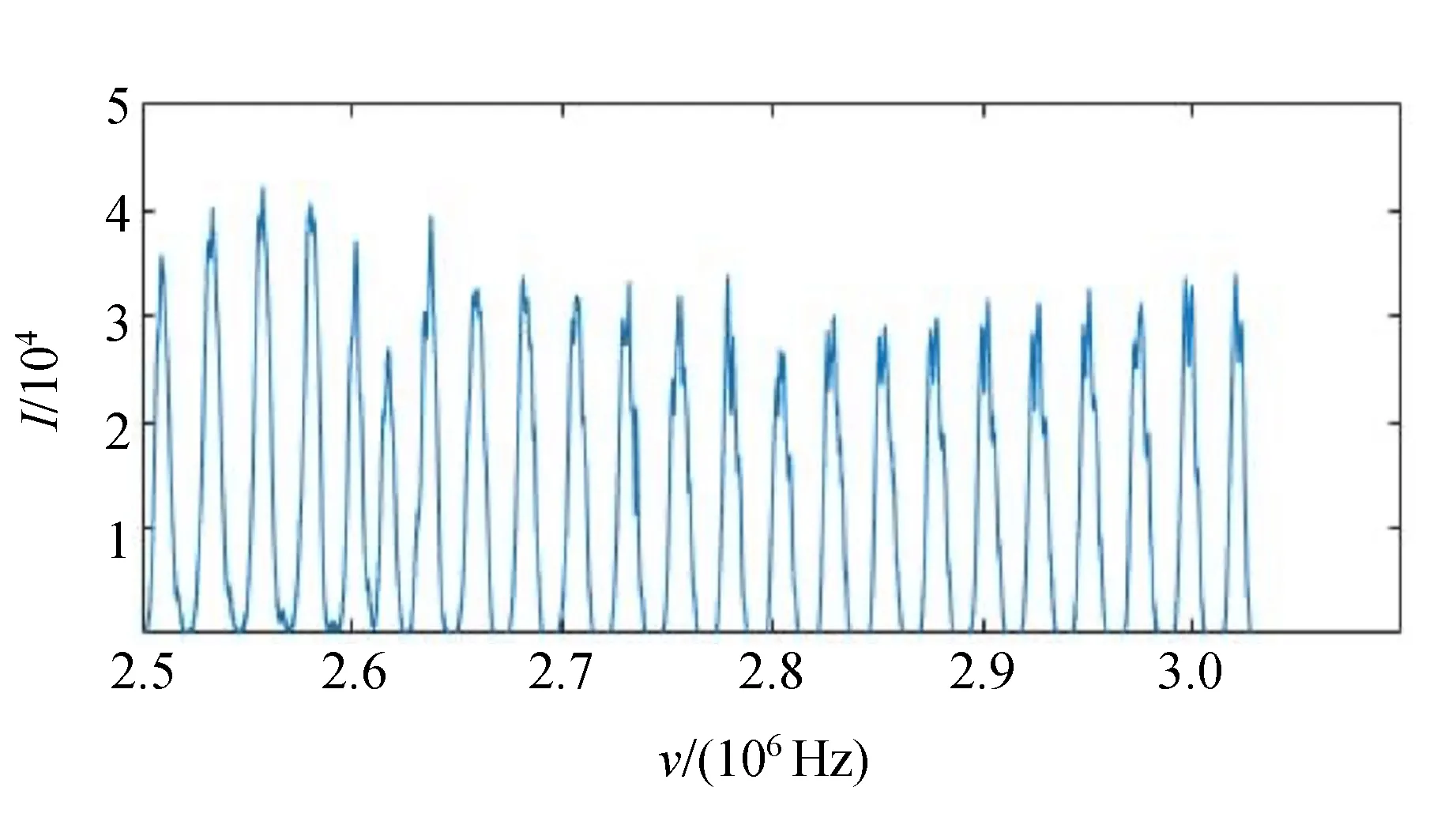
图10 频率与光强的关系
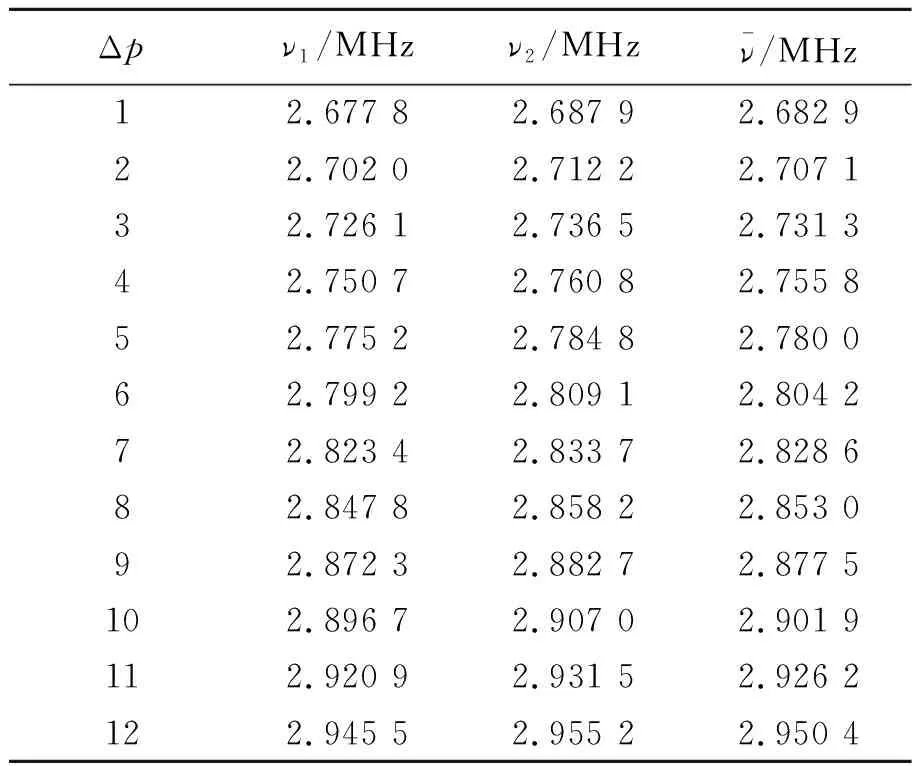
表3 改进光强判别法原始数据
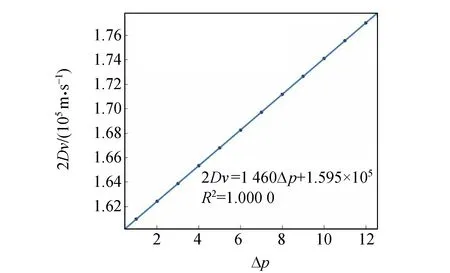
图11 改进后2Dν-Δp的关系
4 结束语
在分光计测角度时,超声频率较小时衍射光强较大但是衍射角较小,但超声频率过高时衍射光强较小不便读数. 光强判别法避免了这一问题,在频率较低时也能非常准确地测量到光强随频率的连续变化,可以精确地得出超声在水中的声速. 并且采用计算机处理数据,减少了误差.
致谢:感谢北京师范大学物理学系的白在桥副教授、李晓文副教授对本实验提供的帮助.
猜你喜欢
中国交通信息化(2022年5期)2022-07-23
导弹与航天运载技术(2022年2期)2022-05-09
物联网技术(2020年12期)2021-01-27
电子制作(2019年24期)2019-02-23
舰船电子工程(2018年11期)2018-11-26
汽车零部件(2017年4期)2017-07-12
中学生数理化·八年级物理人教版(2017年2期)2017-03-25
北方交通(2016年12期)2017-01-15
中学生数理化·八年级物理人教版(2016年7期)2016-12-24
教学月刊·中学版(教学参考)(2016年5期)2016-06-14