GEO-UAV空天双基SAR二维分辨能力分析
2021-01-06 09:01李谨成郭德明
北京航空航天大学学报 2020年12期
李谨成,郭德明
(南京电子技术研究所,南京210039)
合成孔径雷达(SAR)是位于运动平台上的对地观测系统,按照SAR所在的平台可分为星载SAR和机载SAR系统[1-3]。星载SAR的优势在于收集数据的广度上,其百公里量级的测绘带宽度能够覆盖大多数目标区域,但卫星轨道固定且变轨成本较高,使其观测灵活度较低。与星载SAR相比,机载SAR的优势在于其收集数据的灵活性上,能够以较低的成本实现对目标区域高时相的信息获取。
以地球同步轨道SAR(GEO SAR)为辐射源,以无人机SAR(UAV SAR)接收信号的GEO-UAV空天双基SAR能够充分实现天基SAR和空基SAR的优势互补,具有构型配置灵活多样、安全性高、重访周期短、持续观测时间长等优点,是未来空天雷达网络发展的重要方向之一[4-9]。GEO-UAV空天双基SAR的发射接收平台分置,发射斜距和接收斜距不同,2个平台相对于目标的位置与运动关系(即双基SAR的构型)直接决定了其分辨能力。如同单基SAR不具备前视能力,GEO-UAV空天双基SAR在特定区域(观测盲区)也不具备分辨能力,且盲区由其构型决定。因此,在GEO-UAV空天双基SAR的系统设计中应充分考虑二维分辨能力与双基构型的关系。梯度法是一种广泛应用的计算双基SAR二维分辨率的方法,Cardillo给出了梯度法的定义[10],Moccia基于梯度法分析了不同双基SAR组合(如低轨SAR+低轨SAR,低轨SAR+机载SAR等)的二维分辨率[11],但没有针对GEO SAR+UAV SAR的组合形式进行分析。
首先,本文基于多普勒频率和时间延迟变化率最大的准则推导了空天双基SAR的二维分辨率;其次,分析了GEO-UAV空天双基SAR的构型对雷达二维分辨能力的影响,给出了对二维分辨矢量的大小与夹角的约束条件,并将该约束条件作为GEO-UAV空天双基SAR的构型设计准则;最后,通过对点目标的仿真验证了所提准则的准确性。
1 空天双基SAR的二维分辨率
空间分辨率是衡量SAR系统性能最重要的指标之一,它代表了SAR系统对场景中相邻目标的分辨能力。SAR系统的分辨率包括方位向和距离向分辨率,其大小由雷达信号参数和工作模式决定。对于传统单基SAR,方位向指雷达平台的运动方向,距离向指与雷达视线的方向[1]。而双基SAR系统包含2个平台运动方向和2个雷达视线方向,上述定义方式不再适用,因此需要寻求SAR方位向和距离向定义的本质。本质上,SAR的方位向分辨率对应着系统对多普勒频率的分辨能力。因此,方位向分辨率可以被定义为单位多普勒分辨单元对应的距离变化,即
式中:rg为以长度表示的距离向的坐标;τ表示快时间。
梯度法[10]将SAR的方位向和距离向定义为多普勒频率和时间延迟变化最大的方向,可以证明单基SAR二维分辨率的定义为式(1)和式(2)的一种特殊形式,则SAR系统二维分辨率的计算等价于对多普勒频率和时间延迟最大变化率及其所在方向的求解。
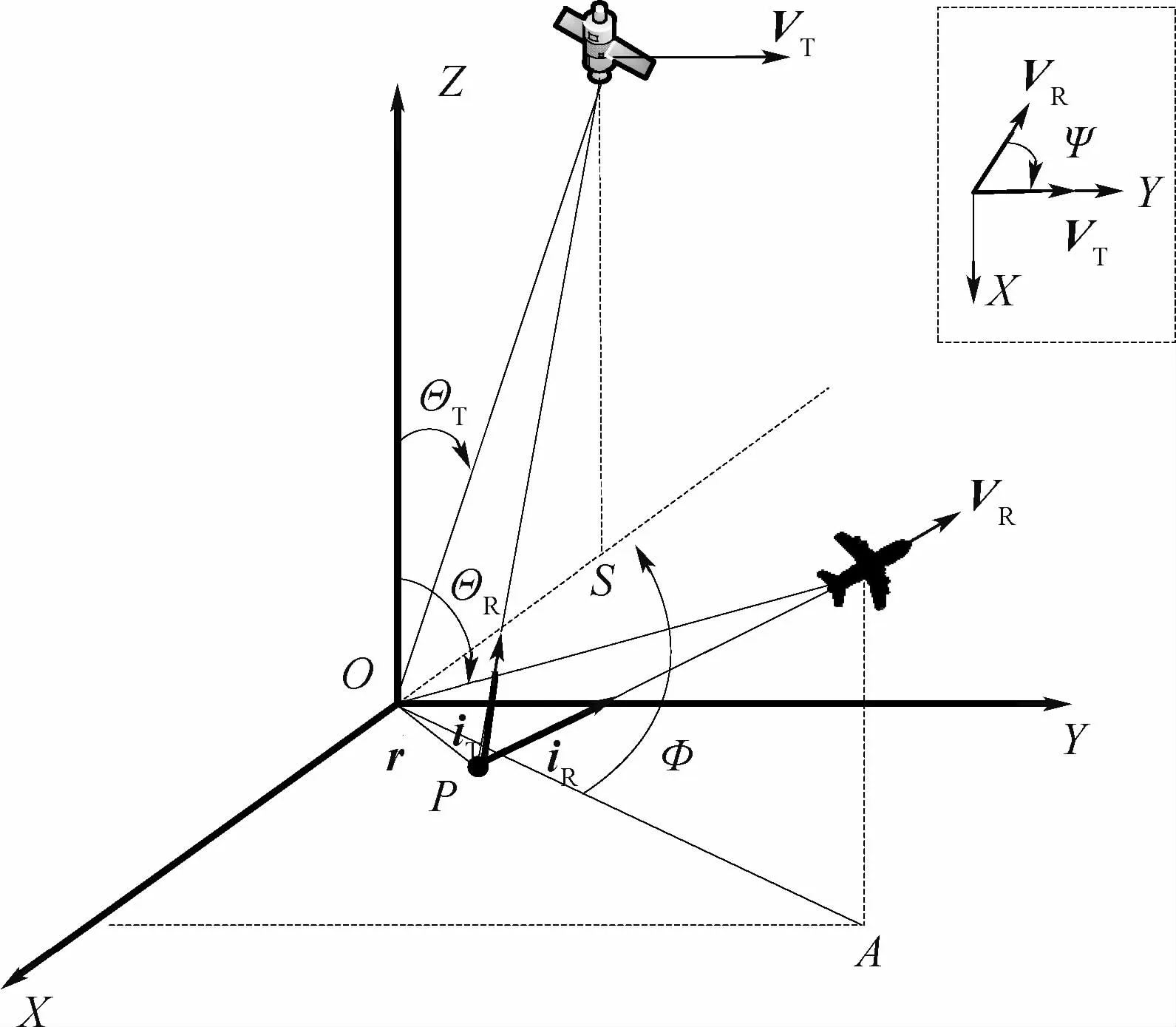
图1 GEO-UAV空天双基SAR的几何构型Fig.1 Geometric configuration of GEO-UAV bistatic SAR

式中:λ为信号波长。由于全孔径时间内的多普勒梯度变化很小,因此可以选择孔径中心时刻计算 fD。
由式(12)可知,空天双基SAR的二维分辨单元的大小不仅与其二维分辨矢量的绝对大小(即二维分辨率)有关,还与二者之间的夹角有关。当二者相互正交(Ω=90°)时,在相同的二维分辨率下能够实现最优二维分辨;与当二者的指向互相平行(Ω=0°或Ω=180°)时,空天双基SAR的距离分辨矢量和方位向分辨矢量处于同一维度,此时的空天双基SAR不具备二维分辨能力。
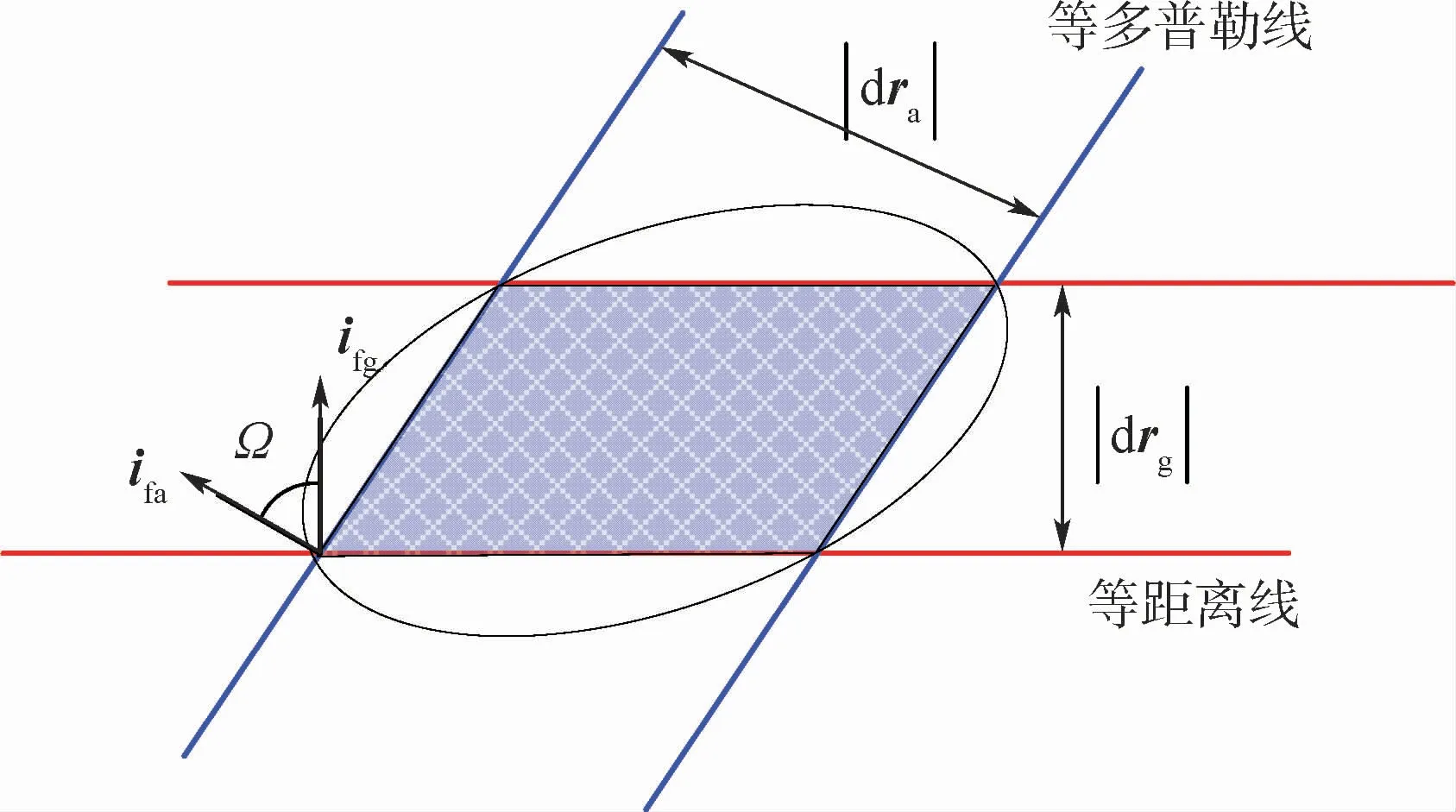
图2 空天双基SAR的二维分辨单元Fig.2 Two-dimensional resolution cell of bistatic SAR
2 GEO-UAV空天双基SAR的二维分辨能力与构型的关系
由式(7)、式(8)和式(10)可知,双基SAR的二维分辨矢量与双基SAR的构型直接相关,相同的雷达参数在不同的双基SAR的构型中实现的二维分辨能力不同。如前所述,双基SAR的分辨能力主要由距离分辨率、方位向分辨率以及二维分辨矢量的夹角决定,下面将分析这3个参数与GEO-UAV空天双基SAR构型的关系。
2.1 距离分辨率

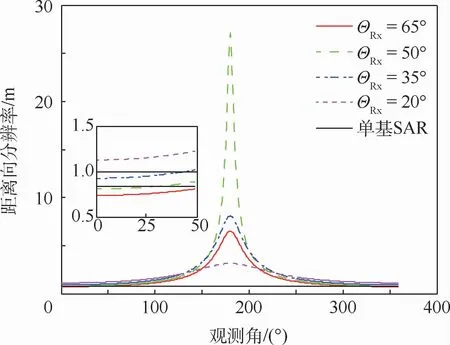
图3 不同接收机入射角下GEO-UAV空天双基SAR的距离向分辨率随观测角的变化(ΘT =45°)Fig.3 Range resolution curves of GEO-UAV bistatic SAR changing with observation angle under different receiver incidence angles(ΘT =45°)
2.2 方位分辨率
中多普勒梯度 fD主要来源于第2项,即空天双基SAR的方位向分辨能力主要来源于接收机平台运动积累的多普勒带宽。
将表1所列的GEO-UAV空天双基SAR参数代入式(9)和式(10),可以得到空天双基SAR的方位向分辨率随观测角和速度夹角的变化,结果绘制在图5中,该图中的最差方位向分辨率为最佳方位向分辨率的1.44倍。由图5可知,方位向分辨率的大小由观测角和速度夹角共同决定,所以不同构型的GEO-UAV空天双基SAR能够获得不同的多普勒分辨能力。对于GEO-UAV空天双基SAR,发射机的速度对方位向分辨率影响较小,发射机的位置在合成孔径时间内变化较小,其构型的改变主要依托于无人机的运动参数。因此,可以通过合理设计无人机的航迹获得更好的方位向分辨率。
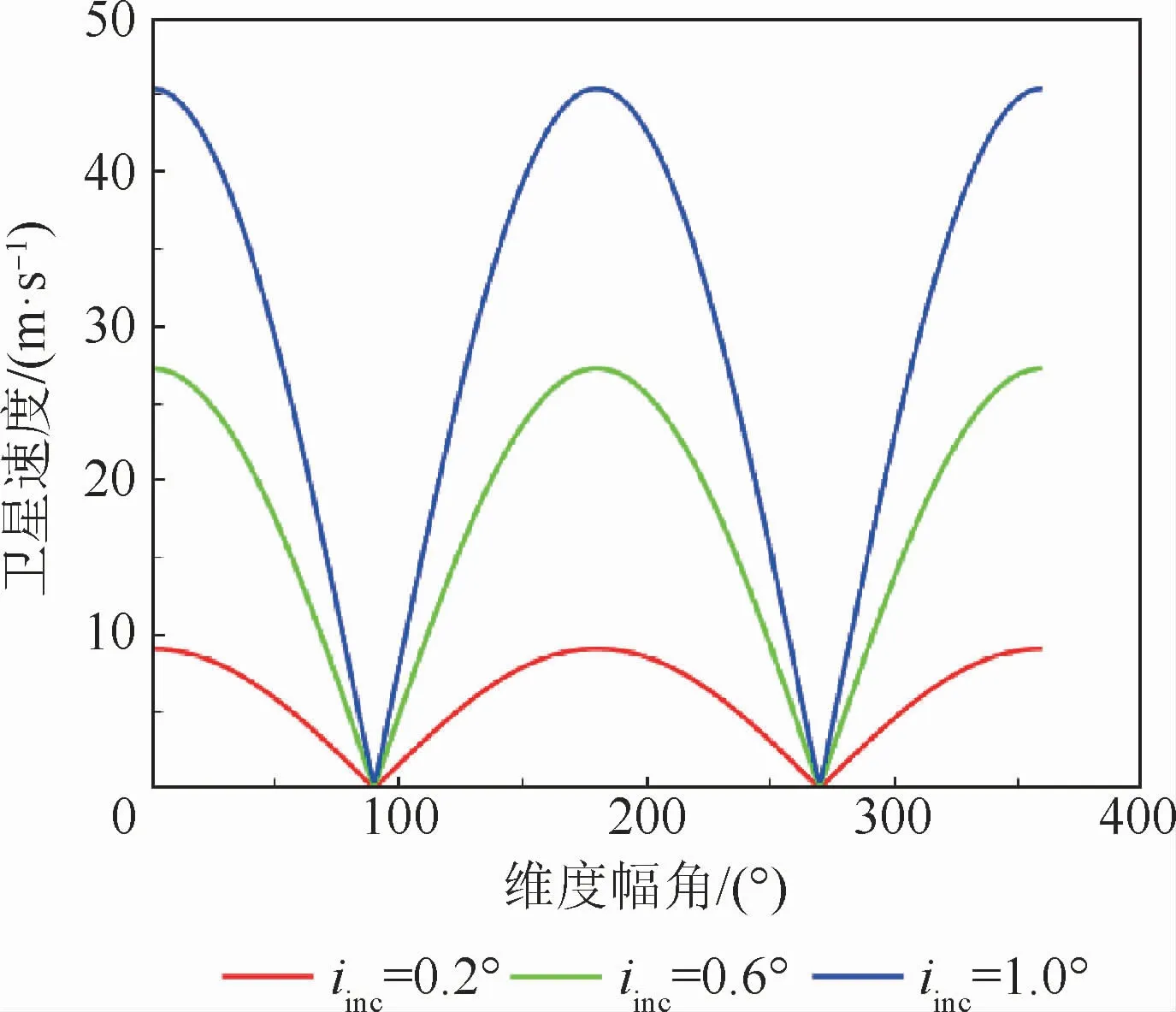
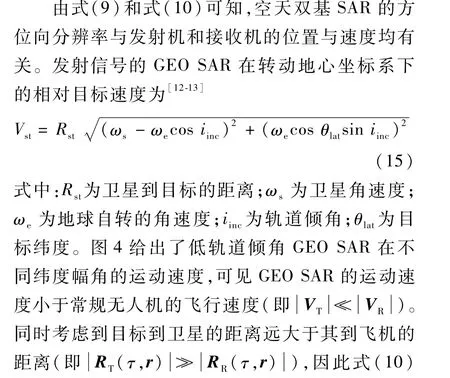
图4 低轨道倾角GEO SAR的卫星运动速度Fig.4 Satellite velocity of low-inclination GEO SAR
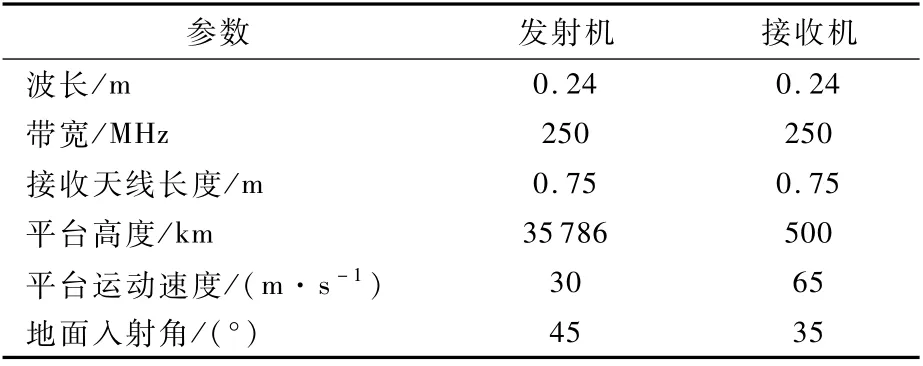
表1 GEO-UAV空天双基SAR参数Tab1e 1 Parameters of GEO-UAV bistatic SAR
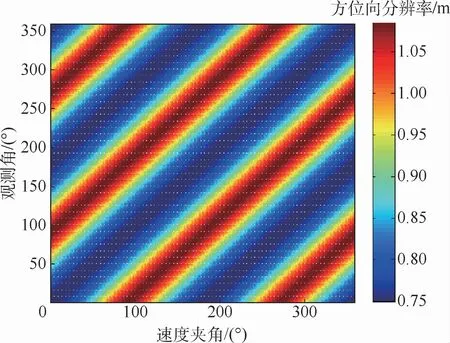
图5 GEO-UAV空天双基SAR的方位向分辨率随观测角和速度夹角的变化Fig.5 Azimuth resolution of GEO-UAV bistatic SAR at different observation angles and velocity angles
2.3 二维分辨矢量夹角
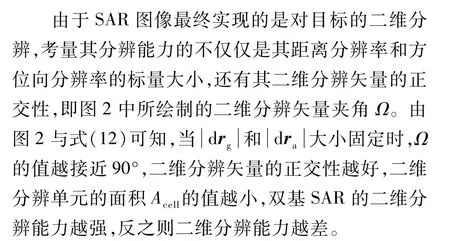
将表1所列的GEO-UAV空天双基SAR参数代入式(8)、式(10)和式(11),可得空天双基SAR的二维分辨矢量夹角随观测角和速度夹角的变化,结果绘制于图6中。图6二维分辨矢量夹角由观测角Φ 和速度夹角Ψ共同决定,适当设置GEO-UAV空天双基的SAR的构型才能获得在对目标合理的二维能力。
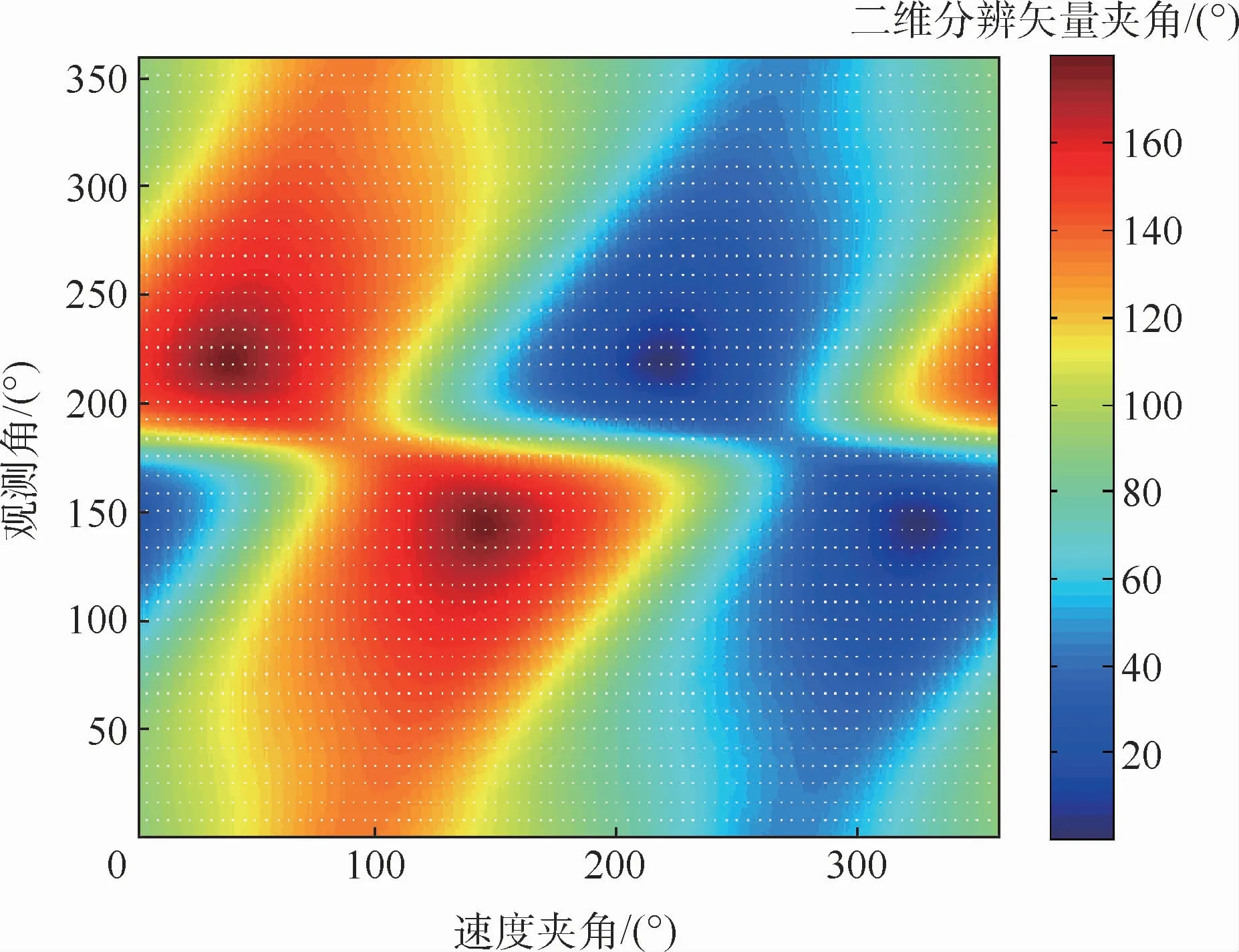
图6 GEO-UAV空天双基SAR的二维分辨矢量夹角随观测角和速度夹角的变化Fig.6 Two-dimensional resolution vector angle of GEO-UAV bistatic SAR at different observation angles and velocity angles
3 基于二维分辨力的构型设计准则
由图1可知,空天双基SAR的构型设计是对观测角Φ和速度夹角Ψ的设计,这2个参数主要由接收机的运动参数决定,即接收机波束照射目标时飞机相对于目标的观测位置和飞行方向。在以上分析中,均假设观测角和速度夹角为2个独立的变量,而实际的UAV SAR在工作中斜视角通常是固定的,即其波束指向相对于机身固定。观测角和速度夹角是耦合的,给定观测角和速度夹角二者中的一个变量的值,便可得到另外一个变量的值。因此,对空天双基SAR构型的设计可以简化为对雷达照射目标时观测角Φ或速度夹角Ψ的设计。
为保证系统具备二维分辨能力,空天双基SAR构型应使得
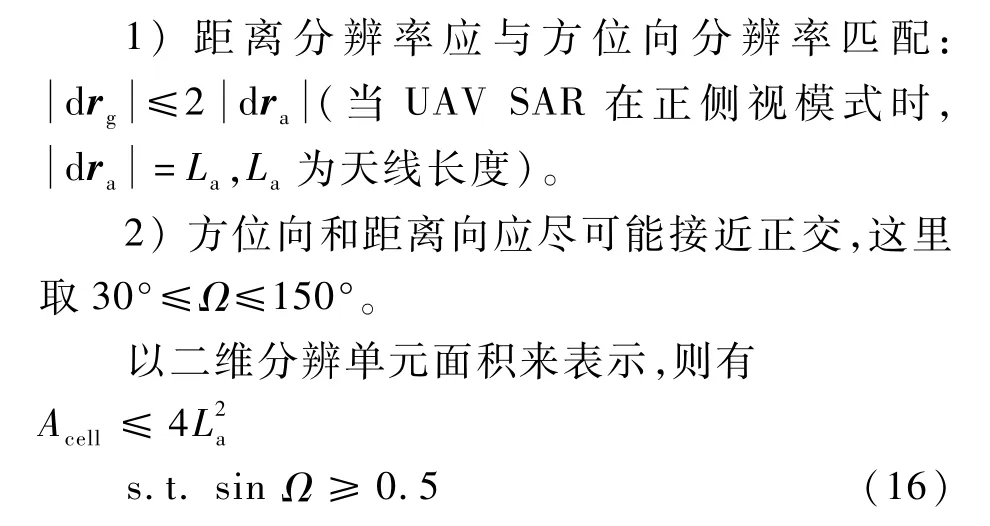
不失一般性,通过观测角Φ 对空天双基SAR进行构型设计。基于式(16)中的准则和表1中的雷达参数,并假设雷达工作中正侧式模式,可以得到如图7中红色范围所示的GEO-UAV SAR可行观测角。
为验证所提准则的有效性,基于表1中的雷达参数,在无人机SAR采用正侧视模式的情况下,采用后向投影算法(Back Projection Algorithm,BPA)[14-15]对不同观测角下的空天双基SAR仿真回波数据进行成像处理。不同观测角Φ 下的点目标成像结果如图8所示,可见由于位于地球同步轨道的发射机运动速度较慢,GEO-UAV空天双基的多普勒分辨能力主要来自于接收机的运动。因此,不同的双基构型的方位向分辨率相同,但需要注意方位向分辨矢量的指向随接收机运动方向的变化而变化。而双基SAR的距离分辨率则随着观测角的变化而不同(见图3)。图8(b)~(h)中点目标的二维分辨矢量夹角均在30°~150°之间,能够清晰地分辨目标的方位向与距离向。而图8(a)、(i)中点目标二维分辨矢量指向接近一个维度,此时的图像严重扭曲,系统不具备对目标进行二维分辨的能力。
图7 满足式(16)中构型设计准则的GEO-UAV空天双基SAR可行观测角Fig.7 Feasible observation angle of GEO-UAV bistatic SAR under configuration criteria in Eq.(16)
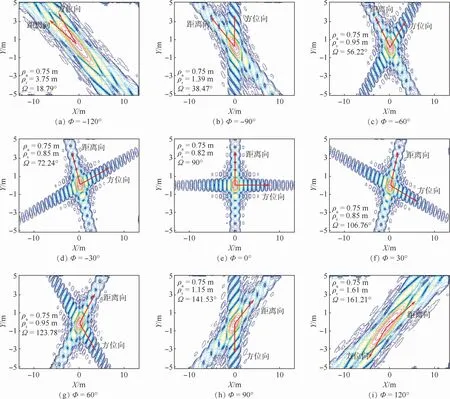
图8 不同观测角下GEO-UAV空天双基SAR点目标成像结果(UAV SAR采用正侧视模式)Fig.8 Point target contours of GEO-UAV bistatic SAR at different observation angles(UAV SAR in side-looking mode)
由图8所示的成像结果可知,当双基构型满足式(16)中的构型设计准则时,系统具备二维分辨的能力,获取的图像具有可读性。不满足准则的情况下,图像严重畸变。
4 结 论
与不具备前视能力的单基SAR类似,GEOUAV空天双基SAR也具有丧失二维分辨能力的观测盲区。与单基不同的是,GEO-UAV空天双基SAR二维分辨矢量的正交性同样会影响系统的二维分辨能力:
1)不同观测角下,GEO-UAV空天双基SAR地距分辨率起伏较大,特定观测角下能够取得比单基SAR更好的地距分辨率。
2)GEO-UAV空天双基SAR的方位分辨能力主要通过无人机平台的运动实现,可以通过优化无人机航迹提升系统的二维分辨能力。
3)为保证图像的可读性,GEO-UAV空天双基SAR二位分辨矢量夹角应在30°~150°之间。
猜你喜欢
江西师范大学学报(自然科学版)(2022年3期)2022-10-18
军民两用技术与产品(2022年7期)2022-08-06
军民两用技术与产品(2022年3期)2022-06-05
军民两用技术与产品(2022年1期)2022-06-01
瞭望东方周刊(2022年5期)2022-03-17
汽车工程学报(2021年3期)2021-06-16
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08
语数外学习·高中版上旬(2020年8期)2020-09-10
新高考·高一数学(2019年1期)2019-04-15
新高考·高一数学(2018年1期)2018-11-23