汽车侧窗区域水污染的仿真和优化
2021-01-05 05:51:22辛俐胡兴军张靖龙王靖宇高炳钊
华南理工大学学报(自然科学版) 2020年11期
辛俐 胡兴军 张靖龙 王靖宇 高炳钊
(吉林大学 汽车仿真与控制国家重点实验室,吉林 长春 130025)
汽车在雨中行驶时,积聚到侧窗玻璃上的雨水形成水膜或小水流,折射和阻挡光线,严重损害驾驶的安全性和舒适性[1- 2]。传统的汽车侧窗水污染问题在实车试验阶段才能发现,加大了新车开发的时间和投资成本。因此,在汽车设计初期对侧窗水污染问题进行研究并提出有效的解决措施十分重要。
侧窗区域的水污染主要来自:A柱溢流;后视镜表面水膜随尾涡脱落撞击到侧窗玻璃;来流中夹带的雨滴[3]。汽车A柱的造型和几何特征对A柱溢流影响较大,因此,通过对A柱造型不断优化,可以有效抑制A柱溢流,提高侧窗视野的清晰度[4]。Foucart等[5]利用仿真模拟了汽车在雨中行驶时车身表面水膜流动的路径,并利用风洞试验验证了数值计算方法的准确性。Gaylard等[6]在A柱上安装楔形导流装置,改变气流和水膜的流动状态,减少了A柱边缘处的雨水积聚。Dasarathan等[7]优化了侧窗区域上方水槽的形式,有效的减少了侧窗污染的面积。Jilesen等[8]通过数值方法预测A柱溢流发生的位置,进一步表明A柱截面形状的不同会引起气流剪切力的不同,从而影响侧窗污染模式。国内对汽车水污染研究起步较晚,仅辛俐等[9]利用格子玻尔兹曼和拉格朗日方法对侧窗水污染进行了模拟,并对比分析了4种不同A柱截面形状对侧窗清晰度的影响。从以上研究可知,当前对侧窗水污染的A柱优化多采用试凑法:首先设计出不同方案的A柱,然后通过风洞试验或数值模拟方法对各方案侧窗水污染进行比较,选出最佳A柱形状。该方法对设计者的工程经验要求较高,且具有一定的盲目性。通过数学方法在一定范围内对设计变量进行自动寻优设计已经广泛应用于汽车空气动力学减阻和降噪方面,并取得了较为成功的经验。基于此,文中尝试将该数学方法结合子域计算方法应用于汽车侧窗水污染处理。
文中以DrivAer为研究对象,选取A柱截面H、L和W3个参数为设计变量,采用正交实验设计方法建立样本空间,运用网格变形技术获得各样本点的模型并通过子域仿真方法计算获得样本点的侧窗水污染面积,选取侧窗水污染面积为优化目标,基于Kriging近似模型和多岛遗传算法建立优化流程。最终,侧窗区域水污染面积有了显著的减小。
1 数值计算理论
1.1 汽车外流场的计算
汽车雨水模拟首先要完成汽车外流场的计算和分析,在此基础上进行水滴和水膜运动过程的研究[10]。文中采用PowerFLOW软件进行数值模拟。该软件外流场的计算基于格子玻尔兹曼(LBM)方法。该方法是Boltzmann方法的特殊的离散形式,建立在分子运动论和统计力学基础上的计算流体力学方法[11]。相比于传统的计算流体力学(CFD)方法,该方法将流体看成许多微小的粒子,从微观角度获取流体分子的运动信息,在时间和空间上完全离散,通过流体粒子的迁移和碰撞来描述流动现象[12]。
文中采用的是D3Q19离散速度模型,该离散模型的离散速度ξα的计算如下
ξα=

(1)
平衡态分布函数f(eq)可表示为
(2)

(3)
外流场计算过程中,根据雷诺数的大小采用不同的数值方法。在自由流区域利用LBM方法求解,在近壁面区域选用ABLM边界层模型和DNS方法求解。利用超大涡模拟(VLES)的方法对湍流区域进行求解。对于可分辨涡结构的大尺度区域直接求解,而小尺度区域则采用RNGk-ε方程建模得到。该超大涡模拟方法,有效提高了计算效率和计算准确度,被广泛应用于汽车空气动力学和水污染计算[13]。
1.2 离散相求解
对汽车外流场求解稳定后,得到初始流场,然后采用拉格朗日离散相模型模拟水滴运动。该方法将雨滴定义为球形颗粒,通过求解雨滴的运动方程来计算其运动的路线[14- 15]。单个雨滴颗粒的运动方程为
(4)
(5)
式中,v为来流速度,vp为颗粒速度,R为雨滴颗粒的半径,mp为粒子的质量,g为重力加速度,μ为流体动力粘度,ρ为流体密度,CD为雨滴阻力系数,Re为相对雷诺数,
(6)
(7)
此外,分别采用O’Rourke颗碰撞模型和泰勒类比(TAB)液滴破碎模型计算颗粒运动过程中的碰撞和破碎。同时,采用欧拉壁面液膜模型对水膜进行模拟。
2 数值方案设置
2.1 整车模型及建立计算域
文中的研究对象为DrivAer模型,如图1所示。该模型是依据实车建立的具有整车细节的空气动力学模型。比通用的空气动力学简化模型更适用于研究复杂的汽车空气动力学现象[16]。采用前处理软件ANSA中的STL格式划分面网格。将网格与几何平面之间的弦偏差设置为0.012 5 mm,使面网格与几何表面高度贴合,尽可能的保留几何特征,并将最大网格尺寸设置为15 mm。

图1 DrivAer 几何模型
图2所示为仿真模拟时所构建的数值模拟风洞模型,其入口设置为速度入口,速度大小为27.28 m/s。出口设置为压力出口,压力大小为0。汽车模型表面设置为固定无滑移壁面,数值风洞的左右两侧和顶面设置为滑移壁面。为消除地面效应的影响,车辆前端与后端地面设置为滑移壁面,车辆周围地面设置为非滑移壁面。

图2 计算域及边界条件
为控制网格总体数量,且能捕捉流场细节,保证仿真的精确度和可靠性,共设置10个VR区(加密区),对计算敏感区域进行加密,其中最小加密网格区尺寸为1.25 mm,随着加密区的向外扩展,其尺寸也在成倍增大,最终体网格数量为8 397.36×104,如图3所示。其中:图3(a)为车体纵向中心截面的网格分布,图中显示了加密区10到加密区4。图3(b)为Z=0.7 m截面体网格分布及其细节放大图,针对后视镜、A柱以及后视镜关键区域进行了局部网格加密。

图3 计算域网格显示
2.2 子域计算方法
不同于汽车外流场的计算,汽车水污染的计算不仅包含多相流之间的耦合,而且更需要细化关键区域的网格,捕捉水滴和液膜的运动,这都会耗费大量的计算资源。为实现计算准确性与计算效率之间的平衡,文中采用车身水污染子域计算方法,计算流程如图4所示。

图4 子域计算流程
将图5所示的侧窗水污染关键区域从计算域中提取出来作为子域。子域的进口离前挡风玻璃约 2 m,侧面包含整个侧窗后视镜尾涡,距离侧窗玻璃约0.8 m,出口包含整个后视镜的尾涡到达B柱位置。重新细化子域中网格,将其边界条件划分为3个区域来确保计算准确性,每个区域的信息都是来自完整计算该区域时流场的平均信息的映射。子域的出口设置为压力出口,流动区域为整个区域的相同位置的压力和速度平均。子域的入口为速度入口,并且在该入口处设置粒子发射器。本次模拟大雨工况下的侧窗水污染情况,粒子发射器雨量设置为17 mm/h,液滴颗粒粘度为0.001 Pa·s,表面张力为0.072 8 N/m2,颗粒密度为1 000 kg/m3。在粒子运动过程中受重力影响,g=9.8 m/s2。液滴颗粒直径分布服从Gaussian分布,最大颗粒为3 mm,最小颗粒为1 mm。液滴的水平初速度设置为27.78 m/s,与汽车行驶速度相同。当车身表面薄膜厚度超过0.3 mm时,水膜二次破碎成液滴,重新进入流场中。
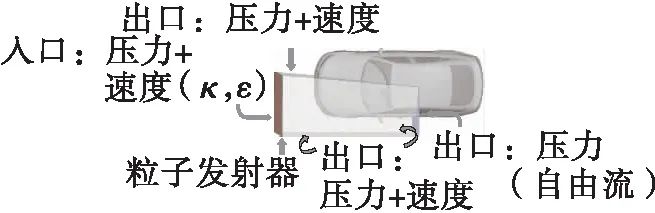
图5 子域计算域
2.3 试验验证
2.3.1 汽车外流场仿真结果及验证
汽车外流场求解的准确性对雨滴以及水膜运动有着重要的影响。准确的外流场计算是进行汽车水污染计算的第1步。图6为阻力系数的发展曲线。从图中可知,初始计算阶段,阻力系数的波动较大,流场不稳定,但随着计算步数的增加(4×104步),计算趋于收敛,阻力系数逐渐稳定在固定值附近。
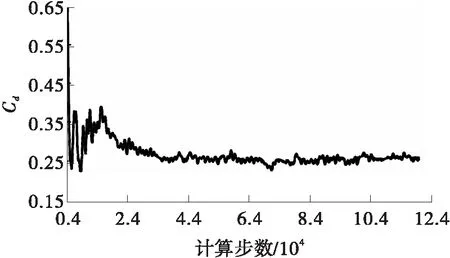
图6 阻力系数曲线
为验证汽车外流场数值仿真数据的准确性,将该车的1/4模型在吉林大学风洞实验室进行了风洞试验,如图7所示。空气阻力系统通过六分力平衡系统进行测量。表1为不同风速下的试验结果与仿真计算结果的对比,计算结果和风洞实验结果的相对误差在5%之内,可见外流场的模拟准确可靠。
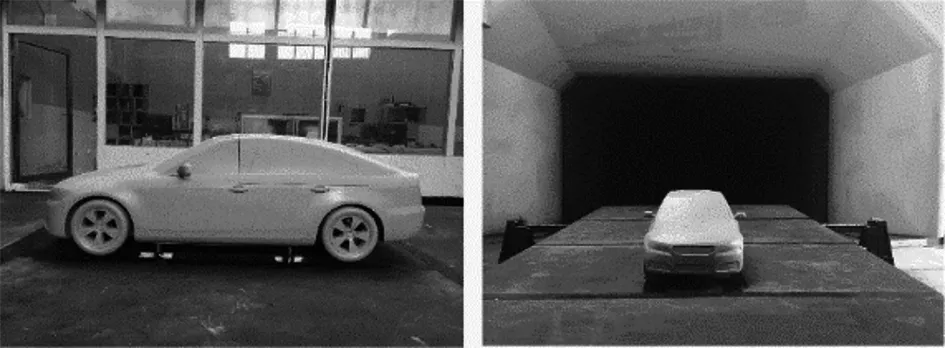
(a)侧视图 (b)正视图

表1 风洞试验数据与仿真数据对比
2.3.2 子域计算结果验证
文中所用整车侧窗水污染仿真计算方法已于本课题组发表文献中进行了试验验证[9]。基于此,现只需验证子域计算方法与整车侧窗水污染计算时的差异性。将子域计算所得后视镜尾涡的水相分布和侧窗区域水相分布与整车计算结果进行了对比,如图8和图9所示。可见,子域计算结果与整车计算结果水相的分布具有良好的一致性。由于文中采用瞬态仿真计算方法,存在微小的差异是正常的仿真现象。

图8 后视镜尾涡水相分布图

(a)子域计算
(b)整车计算
对整个计算域进行水管理计算时,需花费 12 288 h(单个CPU),利用子域方法进行计算时,计算时间仅仅需2 304 h(单个CPU)。可见,子域计算时间是整个计算时间的18.75%,子域计算方法可以在保证精度的同时大幅度提高计算效率。
3 侧窗水污染优化
3.1 设计变量选取及试验设计
在进行侧窗水污染优化之前,分析侧窗水污染的主要来源及敏感区域是十分必要的。对于DrivAer模型,A柱溢流是侧窗水污染的主要来源[9]。基于此,选取A柱截面的3个参数作为设计变量,如图10所示。根据轿车A柱的大小以及A柱变形对人机工程、美学、视野盲区等因素的影响,给定设计变量的H、L、W的取值范围分别为[0,15],[0,18],[5,-10],单位为mm,对于A柱截面参数的移动,水平方向规定向左为正,向右为负。竖直方向规定向上为正,向下为负。

图10 A柱截面示意图
试验设计的方法较多,一般常用的有正交试验设计、拉丁超立方试验设计和优化的拉丁超立方试验设计等[17- 18]。每种试验设计方法的理论根据存在差异,导致设计变量的样本点分布、目标函数响应的方式不同。因此,需要根据计算工况的情况选择合适的试验设计方法。基于水污染计算的复杂性,应在设计因子均匀分布于设计空间的基础上,尽可能的减小计算量。将A柱截面的3个参数定义为3个因子,并根据参数的取值范围,对每个因子取4个水平。根据所确定的因子数和水平数,选用正交试验设计方法可以得到合理的L16(43)试验设计表。根据正交表中的16组样本点取值,采用ANSA软件的网格变形技术对A柱截面变形得到计算网格模型。然后,分别对这16个网格模型进行CFD仿真计算,得到侧窗水污染面积,如表 2所示。其中侧窗区域的污染面积Sw可以通过下式获得,
该类型街道白天时段交通压力持续较大,未存在明显的高峰和非高峰,06:00—21:00交通运行状况一直处于中度偏严重拥堵的状态,交通需求持续较大,仅在中午12点左右交通状况微弱改善,总体上看晚高峰的拥堵情况较早高峰更差. 具有这一特征的街道多为全天交通发生和吸引强度均较大的区域,如东华门街道内有天安门广场、故宫博物院等历史遗址,还包括很多政府机构、医院、学校以及商业街,白天会持续发生和吸引大量的交通流,全天交通需求量居高不下,全天拥堵时间较长.
(8)
式中,Rw为侧窗总像素,Rs为侧窗污染像素数,S为侧窗总面积。

表2 正交实验表及计算结果
3.2 近似代理模型建立及可信度分析
近似代理模型可以根据设计变量和结果之间的映射关系,拟合为经验公式,能快速实现优化设计[19]。相比于神经网络近似模型和响应面模型,该模型可以覆盖更多的样本点的取值。通常由全局代理模型和局部代理模型组成[20]:
y(x)=f(x)+z(x)
(9)
式中,y(x)为待求解的响应函数,f(x)为通过样本点拟合的近似函数,z(x)为模拟局部偏差的近似函数,可表示为均值为0和方差为σ2的随机分布误差。z(x)的协方差矩阵可表示为
cov[z(xi),z(xj)]=σ2R[R(xi,xj)]
(10)
式中,R为相关矩阵,R(xi,xj)是随机样本点中任意两个样本点的相关函数。该相关函数的种类很多,此次计算采用常用的高斯函数作为相关函数,可表示为
(11)
式中:m表示设计变量的个数;xik和xjk表示样本点xi和xj第k个设计元素;θk表示待拟合相关函数的未知相关系数,其极大似然估计可以用来拟合Kriging模型,表示为
(12)
已构建的近似模型的精度是否符合要求可以通过Kriging拟合值与CFD计算值之间的拟合程度来表示。图11所示为体现Kriging模型所构建代理模型精度的散点图,其中纵坐标为仿真计算得到的数值,横坐标是近似代理模型获得的预测值,中间黑色斜线表示真实值与预测值相等。因此,散点越靠近黑色实线则表示预测值和CFD计算值的误差越小,近似代理模型的拟合程度越高。从图中可以看出,散点基本都落在黑色实线的附近。而且,通过计算,代理模型的决定系数R2=0.98,远大于0.9,可见基于Kriging模型构建的侧窗水污染近似代理模型具有很高的预测精度,可以用于后续优化计算。
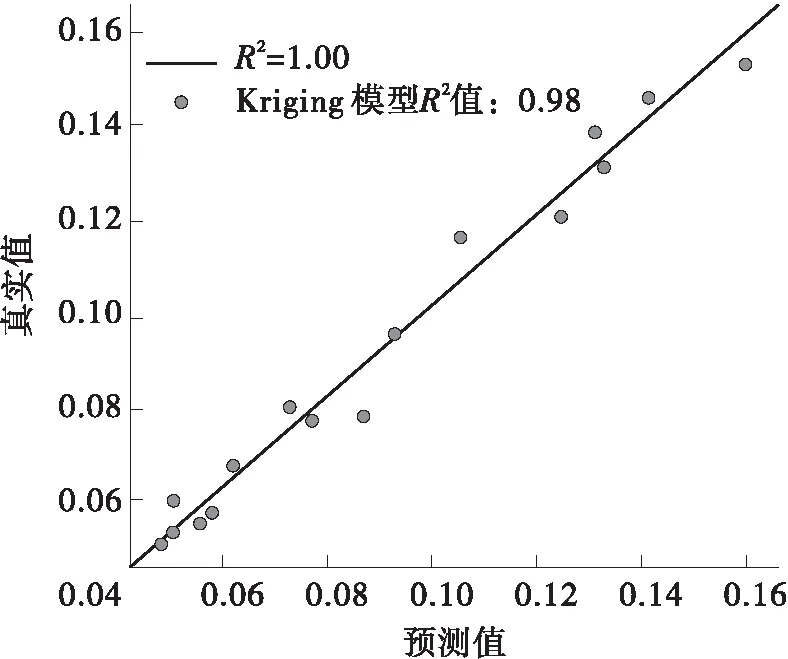
图11 近似模型预测值与CFD计算真实值的比较
3.3 优化结果与分析
表3给出了原始模型和优化模型之间的设计参数和优化目标的比较。经过一些系列优化后,H增加了7.2 mm,L增加了1.2 mm,W增加了11.2 mm,与原始模型相比,侧窗水污染面积下降了66.2%。

表3 原始模型与优化模型结果对比
根据多岛遗传算法得到的最优解,采用网格变形技术对原始模型进行变形,并通过CFD仿真计算,求得Sw=0.046 0 m2,相对误差为1.7%,说明该全局优化方法具有较高的可信度。
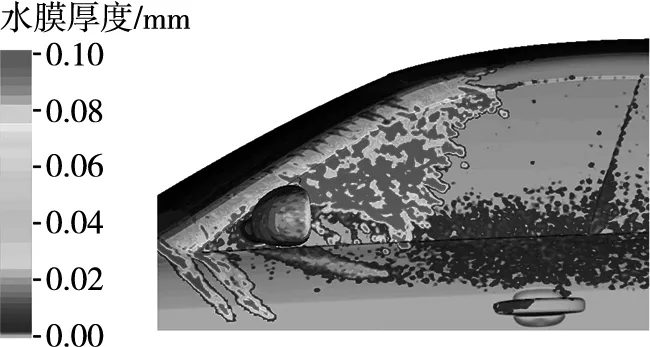
图12为原始模型和优化后模型的侧窗水膜厚度分布对比。图13为原始模型与优化后模型的侧窗区域表面剪切力分布对比。由图12可以看出,优化后模型A柱表面以及侧窗关键区域的水膜明显减小。挡风玻璃的雨水在高速气流剪切力和刮雨器的作用下向A柱与挡风玻璃交界处流动。积聚在该处的水膜一部分在重力的作用下向下流动,由发动机舱处的排水系统排出。一部分随气流剪切力向侧窗移动。如图13(a)所示,原始模型A柱表面气流剪切力较高且方向与水膜运动方向一致,水膜在气流剪切力的驱动下,向侧窗区域流动。侧窗玻璃上方存在明显的低剪切力区域,这就意味着,水膜一旦到达该处后,更易受重力的驱动向下运动,影响驾驶员的关键视野区。而优化后的模型,前侧A柱表面剪切力方向与水膜流动方向相反,迫使水膜积聚在该处,阻碍水膜向侧窗运动,如图13(b)所示。优化后模型A柱顶部区域气流剪切力方向向上,进一步阻碍了水膜在重力作用的向下流动。因此优化后模型的侧窗水污染明显减少。

(a)原始模型

(b)优化模型
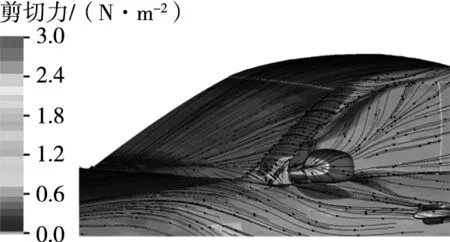
(a)原始模型

(b)优化模型
4 结论
(1)文中以DrivAer A柱截面尺寸H、L和W3个参数作为设计变量,选取侧窗水污染面积为优化目标,采用正交试验方法进行样本点抽样并得到对应的CFD仿真结果,运用Kriging近似代理模型和多岛遗传算法,实现了侧窗水污染优化设计。
(2)与原始模型相比,优化后模型的侧窗水污染减小了66.2%。相比于传统的试凑法,该方法具有显著的成效,为汽车开发早期阶段进行侧窗水污染研究提供了参考。
(3)采用子域数值计算方法对侧窗区域的水污染进行模拟研究,保证准确性的同时大幅度的降低了计算量,保证了为汽车水污染优化中大量样本点的计算提供了可行的方案。
(4)优化后的模型,A柱表面的剪切力方向与水膜运动的方向相反。这种现象抑制了水膜溢流到侧窗。
猜你喜欢
电子学报(2022年2期)2022-04-18 14:42:24
少儿科技(2022年4期)2022-04-14 23:48:10
煤炭工程(2021年7期)2021-07-27 09:34:20
中国电气工程学报(2019年20期)2019-09-10 00:05:56
物理学报(2018年10期)2018-06-14 08:48:48
企业科技与发展(2017年9期)2017-05-30 10:48:04
北京航空航天大学学报(2017年12期)2017-04-23 08:31:41
核科学与工程(2016年3期)2016-01-03 07:22:25
计算机辅助工程(2014年1期)2014-03-13 08:26:03
振动、测试与诊断(2014年5期)2014-03-01 01:14:22