350km/h高速货运动车组制动系统研制
2021-01-04 10:42亢磊刘琨肖宇李松张笑凡王志龙
大连交通大学学报 2020年6期
亢磊,刘琨,肖宇,李松,张笑凡,王志龙
(中车长春轨道客车股份有限公司,吉林 长春 130062)*
为提高我国货物运输能力和效率,形成我国快捷货运运输体系,突破时速250 km以上货运动车组关键技术,建立完善的快捷货运技术标准体系.我国在借鉴350 km/h“复兴号”高速客运动车组技术平台的基础上,开发了350 km/h高速货运动车组(以下简称:货运动车组),完善货运动车组的开发技术系统平台,为高附加值产品及电子商务产品的快递运输贡献力量,充分发挥铁路在综合交通运输体系中的骨干和主导作用[1-7].
1 总体概述
货运动车组借鉴“复兴号”客运动车组技术平台,满足最高运行速度 350 km/h,最高试验速度385 km/h,最大轴重17吨,设计寿命为30年的顶层设计要求.能够在我国既有350 km/h客运专线上进行货运运营,同时满足在既有客货两用铁路线上的货运要求.货运动车组为 8 辆编组,采用 4 动 4 拖编组方式,划分为 4 种车型,其中 01、08车为带司机室的拖车,02、07车为动车,03、06车为带受电弓的拖车,04、05 车为中间动车,货运动车组车内设货物押运人员和机械师工作区、货仓区以供办公和载货的不同需要,其中01、08车采用带工作区设置的货车,其余车辆均采用货车设置(如图1).
货运动车组与“复兴号”客运动车组相比,具有空重车变化大、大载货量、运营距离长、地域广、全天候、中间车无人值守等的运营特点.针对这些运营特点,重新制定并开发了适应货运动车组的制动系统.
2 制动系统技术要求
2.1 需要解决的技术难题
为保证高速货运动车组制动系统的安全性、可靠性,系统分析制动系统的技术要求和特点,主要技术难点如下:
(1)为适应满载货物和空载时的载荷变化范围,制动系统设置大范围的空重车调整功能
货运动车组空车与重车的重量差值约为120吨,为满足紧急制动时的制动距离须设置空重车调整装置,根据车重的变化,实时调整制动力,使动车组按照设置的减速度进行制动.
(2)大载荷量下的基础制动热容量加大
货运动车组运送货物时需要保持最大载货量的运营,偶尔会在超重极限工况下运行,当运行速度350 km/h时,要使高速货运动车组在规定距离内停下,对制动盘的热负荷能力是一个巨大的考验.在选择制动盘时,必须对其热负荷能力加以考虑,否则将引起制动盘热裂纹、变形、螺栓断裂、磨损率高、寿命降低等问题.
(3)防滑控制
由于车辆的大载荷量工况及全天候长距离运营,在不利黏着工况下制动力较大,导致滑行的概率增加,为防止货运动车组轮对滑行引起擦伤或制动距离增加,需合理设置和优化动车组防滑控制策略和增粘技术.
(4)制动控制部件的操作及远程控制需求
由于货运动车组的中间车辆内无人员值守,全部为货物集装器,因此制动系统车内隔离操作无法执行,需要采用车下双侧可操作和头车远程操作等控制功能.
2.2 顶层技术参数
由于货运动车组将在高速铁路上与客运动车组共线运行,制动系统的顶层技术参数需参照“复兴号”客运动车组,货运动车组制动系统主要顶层技术参数见表1.
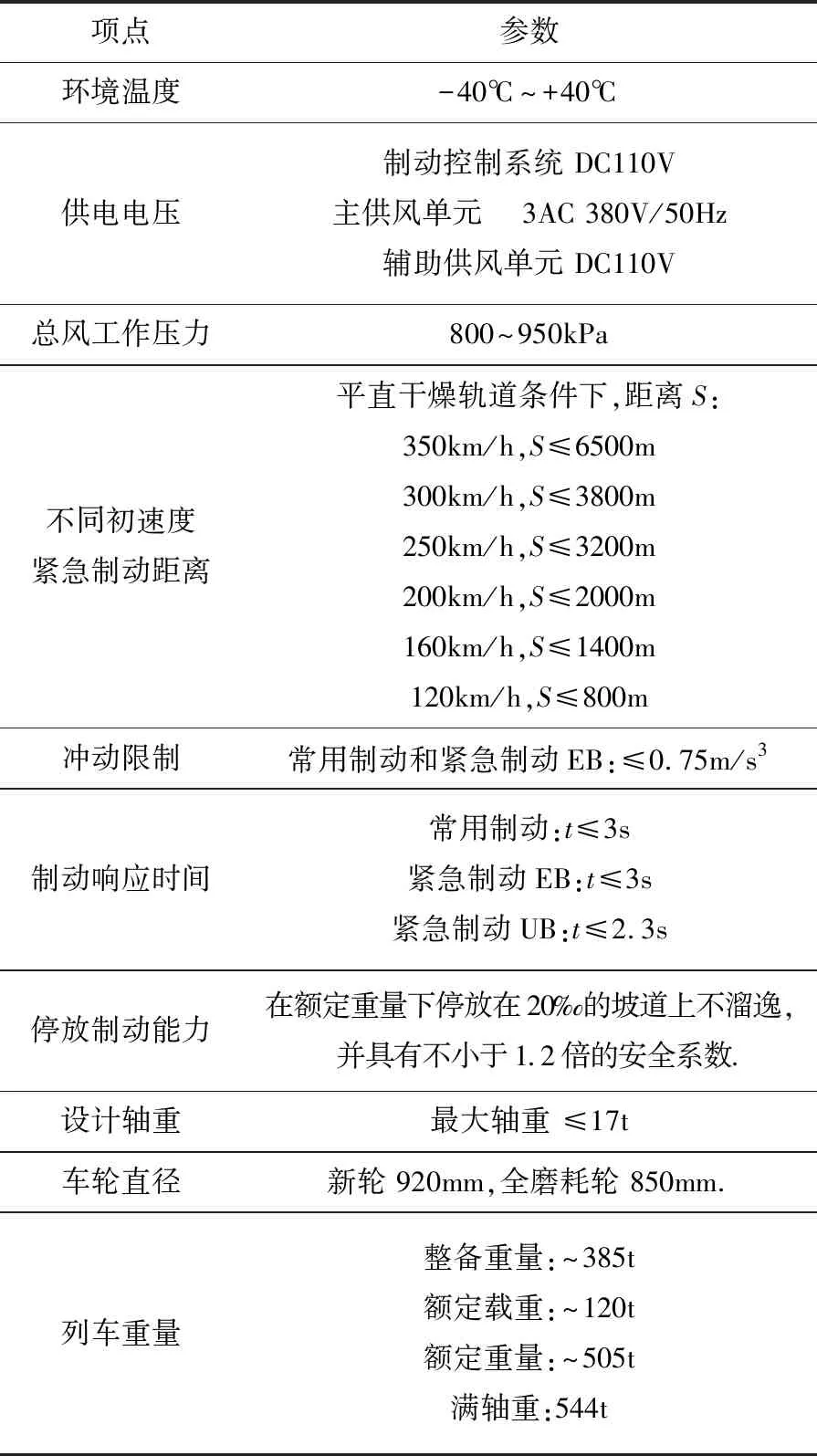
表1 制动系统顶层技术参数
3 制动系统技术方案
货运动车组制动系统以成熟的“复兴号”客运动车组研发平台为基础,针对货运动车组技术特点而制定的制动系统技术方案.具备较高的安全性、可靠性、可用性、舒适性、环保特性和互换性.
3.1 制动系统设计原则
制动系统主要设计原则如下:
(1)按照“故障导向安全”的原则进行设计;
(2)采用低维修成本的原则设计;
(3)制动指令传输采用网络、硬线指令冗余;
(4)按速度-黏着减速模式曲线控制列车减速或停车;
(5)常用制动和紧急制动EB采用空电复合制动模式.控制策略考虑动力制动优先,尽最大能力充分发挥动力制动作用,降低机械磨耗,只有当动力制动能力不足时,才使用空气制动;
(6)采用车控方式,具备按列车级进行空电复合制动控制的能力;
(7)采用标准化、系列化、模块化设计,零部件具有较高的互换性.
3.2 制动系统实施方案
货运动车组制动系统具有常用制动、紧急制动 EB、紧急制动 UB、乘客紧急制动、停放制动、保持制动、比例制动、清洁制动、防滑控制、车轮不旋转检测、冲动限制、制动力分级控制、升弓供风控制、主空压机控制、撒砂控制、监测、诊断和故障记录、制动试验、回送和救援、自动速度控制、休眠控制、参考轴隔离、空气制动隔离、空簧供风、压力检测、制动控制单元供电远程复位等功能.
3.2.1 制动系统构成
制动系统采用车控架构,由制动指令设备、直通式空气制动系统、BP救援转换装置、风源系统和基础制动装置等组成.直通式空气制动系统由电子制动控制单元 (EBCU)、气动控制单元(PBCU)、防滑控制单元及附件组成,设备组成及布置见图2、图3.
3.2.2 制动系统控制
根据货运动车组的编组形式,制动系统共用列车成熟稳定的TCN网络,全列8辆编组分为2个MVB控制单元,单元内的通信由车辆数据总线MVB来完成,单元间的通信由列车总线WTB完成.制动系统的控制架构主要分为三层级,实现制动控制的管理,分别为列车级制动管理TBM(占用端头车EBCU)、单元级制动管理SBM(头、尾车EBCU) 和本地级制动管理LBCU(本车EBCU 和动车牵引控制单元TCU).动车组正常运行时,由牵引/制动手柄、车载列车控制系统、列车网络控制系统发出的制动指令,通过硬线或网络传输到所有车的EBCU中,TBM对制动指令解析计算后,通过WTB/MVB发送给SBM,SBM将制动力控制指令通过MVB发送给单车LBCU,其中动车的LBCU将电制动指令发送给TCU,TCU控制输出电制动力,各车LBCU根据TBM的制动力需求指令和单元内各车空气制动能力等信息,计算并控制施加空气制动力,LBCU通过激活气动制动控制单元(PBCU)的电空转换阀进行预控空气压力的控制,并供给中继阀,经中继阀作用后的压力空气通过防滑阀到达制动缸形成空气制动力.网络控制构架和控制框图见图4、图5.
3.2.3 安全性保证
紧急制动的触发是动车组安全停车的保证,紧急制动的触发和紧急制动距离符合设计要求.货运动车组的紧急制动采用紧急制动EB和紧急制动UB,并设置列车安全环路硬线,通过对安全环路和列车线的控制触发相应的紧急制动实现故障导向安全的设计准则[8].
(1)紧急制动EB
紧急制动EB是制动系统设备正常情况下施加的紧急制动,按定义的减速度模式曲线控制方式控制.紧急制动EB 时,空气制动随时与电制动进行自动配合,能充分利用电制动.紧急制动EB的触发条件:司机手柄在紧急制动EB 位;列车运行时停放制动意外施加;乘客紧急制动请求触发;司机警惕装置触发;车载地震紧急处置装置触发.司机手柄或乘客紧急制动触发的紧急制动EB,司机通过操作可以随时缓解.其它条件触发的紧急制动EB,均采用零速联锁.
(2)紧急制动UB
紧急制动UB是在紧急制动UB安全环路失电时直接控制紧急制动电磁阀实施的紧急制动.紧急制动UB采用零速联锁.紧急制动UB的触条件为:车载列车控制系统(ATP)触发;列车分离;紧急制动UB安全环路断开或失电;列车失电;按下紧急制动按钮(蘑菇头);紧急制动EB减速度不足;被救援时BP救援转换装置压力开关动作.
(3)安全环路及列车线控制
制动系统可接收紧急制动EB和紧急制动UB环路失电指令.制动控制模块的制动缸压力开关接入制动缓解环路中,当空气制动施加时,制动缓解环路失电,表示空气制动施加状态.制动控制模块的停放制动控制模块的双脉冲电磁阀接收来自停放制动施加指令线和停放制动缓解指令线信号,执行停放制动的施加和缓解指令,EBCU可输出停放制动监控环路断开的硬线指令.各车EBCU可接收来自保持制动缓解列车线的缓解指令(见图6).
3.2.4 空重车调整
货运动车组各车PBCU内设置有空重车调整阀和空簧压力传感器,EBCU通过压力传感器采集两个转向架的空簧压力值,并根据空簧压力特性曲线实时计算车辆重量.常用制动和紧急制动EB时,制动系统根据车辆重量结合制动级位实时修正空气制动力和电制动力以满足减速度要求,通过控制EP阀输出所需预控压力Cv1;紧急制动UB时,安全环路断开紧急电磁阀失电,空重车调整阀根据空簧压力反馈值,按照空簧压力、车重以及紧急制动单车所需减速度值设定好的阀特性曲线输出紧急制动UB所需预控制压力Cv2(见图7).空重车的检测能力以及压力控制范围可以满足高速货运动车组从空车到超载时的变化范围.保证制动力满足减速度及制动距离的要求.
3.2.5 大热容量的基础制动
为满足最大载货量及超载余量的要求,按照满轴重17吨,初速度350 km/h的热容量要求,制动盘在“复兴号”客运动车组基础进行试验验证,对制动盘进行相关型式试验.轮盘采用锻钢材料,力学性能更加优异;同时优化夹钳单元结构,受力部件尺寸加大提高强度,制动缸体更加紧凑节省空间(如图8).相关试验结果见图9.
3.2.6 防滑控制
货运动车组的防滑控制装置承担电制动防滑和空气制动防滑控制功能.在车辆制动状态下,当EBCU检测到车轮出现滑行时,针对电制动,EBCU会通过减少电制动信号使TCU按照百分比减少电制动力实现防滑控制;针对空气制动,EBCU会通过防滑排风阀的保压、排风动作减少滑行轴的制动力,进行防滑控制,避免轴抱死并在低黏着条件下最大利用和改善黏着,实现制动力充分发挥缩短低黏着条件下的制动距离.为保证防滑功能故障工况下的制动安全距离要求,防滑控制按照UIC541-05标准规定了防滑控制时间.货运动车组的防滑控制功能由我国自行设计的最新型动车组的滑行检测方法、防滑控制方法、安全导向控制、轴不旋转冗余检测、增粘控制方法等控制策略,通过半实物的硬件在环仿真测试技术进行防滑系统的开发和优化,并通过高速线路试验验证了高速列车防滑系统的有效性和可靠性[9-10].防滑控制部件组成见图10.
3.2.7 制动控制部件的操作及远程控制需求
由于货运动车组中间车无人值守,因此制动系统相关操作需要在车下双侧均可执行,同时在列车运行过程可通过远程操作功能实现相关操作.
(1)空气制动和停放制动的隔离在车辆车下两侧均可操作,两侧均设置了空气制动和停放制动的隔离塞门.
(2)司机室远程空气制动隔离功能
货运动车组单车空气制动切除,可以通过HMI监控屏远程实现,在HMI监控屏设置单车空气制动切除界面,可选择车辆进行单车空气制动切除和复位,CCU根据选择的车辆通过单车I/O信号控制本车空气制动切除继电器,控制PBCU内远程空气制动缓解电磁阀得电和失电,实现单车空气制动的切除和复位.
(3)制动控制单元供电远程复位等功能
为解决因电磁干扰等原因造成EBCU通讯或信号异常时,货运动车组无法在相应车辆内对单个EBCU供电空开进行断电复位的操作,在HMI监控屏上设置BCU断电复位操作界面,可实现单车EBCU的断电复位操作.当从HMI监控屏上选择单个BCU时,CCU通过单车DO输出高电平,控制单车EBCU复位继电器实现EBCU断电,延时一定时间后,EBCU断电指令消除,恢复EBCU得电.
4 相关计算
4.1 制动计算
4.1.1 制动减速度的设定
货运动车组制动系统各级制动减速以“复兴号”客运动车组为基础,根据黏着系数及制动距离的要求,紧急制动减速度设置不超过TSI干轨的黏着限制,紧急制动距离满足顶层设计参数要求,紧急制动UB时采用高低阶压力控制;常用制动设置为1~7N级减速度.减速度曲见图11.
4.1.2 紧急制动距离计算
根据减速度曲线进行紧急制动EB、紧急制动UB、停放制动能力和保持制动能力计算.紧急制动均能满足紧急制动距离要求,停放制动满足满轴重时20‰坡道的停放能力,具有1.2倍的安全系数.
(1)制动距离S计算:
(1)
式中:Vk为离散化速度;k为离散点编号;Ns为离散点数量;V0为制动初速度;tU_Max为制动缸升压时间tu和冲动限制要求的升压时间tu_I中取大值.
制动距离计算结果如表2所示.
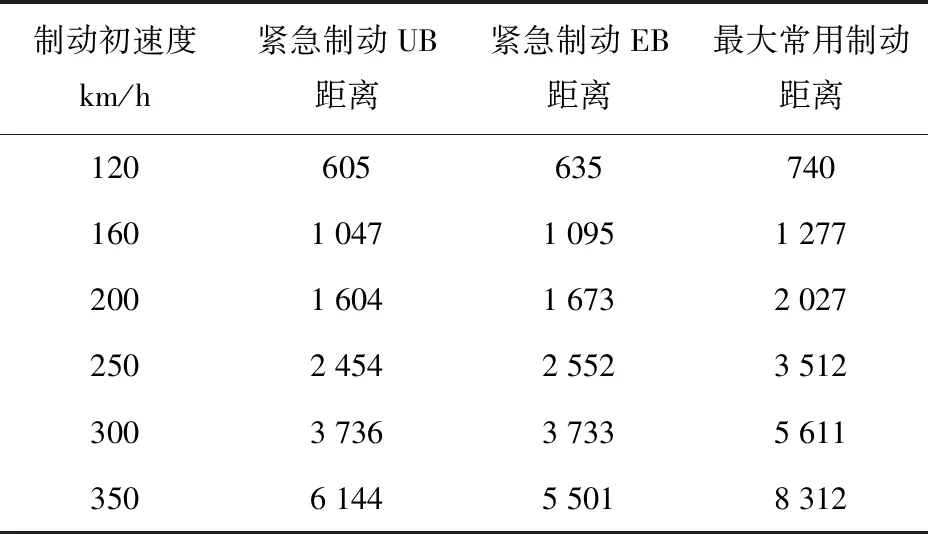
表2 制动距离 m
(2)停放制动能力计算:
停放制动防滚安全系数公式:
δ=FPB(i)/F(i)t_R
(2)
式中:FPB(i)为第i个车的停放制动力;F(i)t_R为第i个车的坡道下滑力;
(3)
式中:RF为制动盘摩擦半径;DW_N为车轮直径;FN_PB为停放制动夹钳闸片与制动盘的接触力;Np(i)为车辆停放夹钳数量;ξ0为静态摩擦系数.
(4)
式中:M(i)为车辆重量;ip为坡道坡度;Cw为风阻系数;Vw_max为最大风速;NV为车辆编组数.
根据上述公式计算,车辆及列车在满轴重工况下的停放制动安全系统见表3.
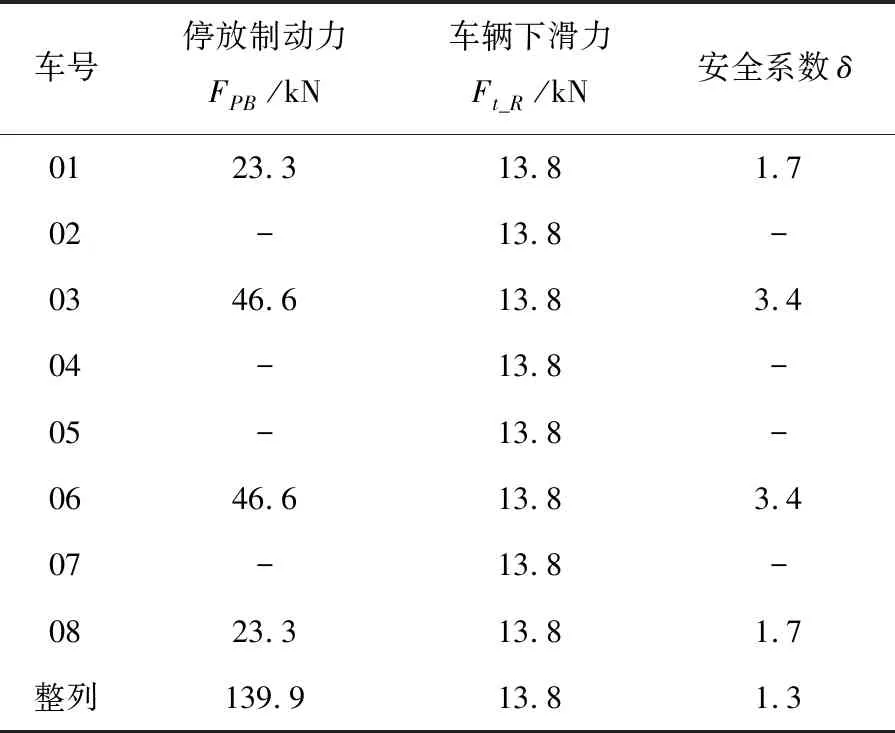
表3 停放制动能力
4.2 耗风量计算
根据货运动车组各耗风设备(如制动系统、门系统、高压系统等)的用风特性和空压机能力,计算运营过程中空压机的工作时间、工作率.货运动车组在03、06车各配置一台排量为1 300 L/min的螺杆式压缩机,满足总风工作压力800~950 kPa.根据计算空压机循环工作次数为4.5 次/h,工作率约为31.2%,列车含空气弹簧的初充风时间为14.48min.
4.3 制动盘热负荷计算
根据紧急制动减速度要求,对满轴重工况下的制动盘热容量进行计算,热容量满足要求均未超过700℃.在350 km/h初速度下,连续两次紧急制动UB时的轮装制动盘最高盘温为577℃,轴装制动盘最高盘温为639℃;在350 km/h初速度下,连续两次紧急制动EB时的轮装制动盘最高盘温656℃,轮装制动盘最高盘温为623℃.
5 样车试制及调试
货运动车组已经完成样车的试制和相关调试工作,性能状态良好,后续将逐步开展正线型式试验来验证整车性能.调试内容如下:
(1)单车静态测试主要完成制动控制装置屏蔽接地性能检查、输入输出接口检查、摩擦制动测试、防滑测试、撒砂功能测试、停放制动测试、供风与悬挂装置测试、基础制动测试、回送装置屏蔽接地性能检查、输入输出接口检查、气密性测试、主供风单元检查、辅助供风单元检查.
(2)整列静态测试主要包括辅助空压机及升弓控制、空压机控制、充风时间测试、空簧压力检测、保持制动功能测试、比例制动功能测试、停放制动功能测试、安全环路检测、常用制动测试、清洁制动测试、撒砂控制测试、远程缓解测试、BCU供电复位测试、制动试验测试、救援回送测试、气密性测试、故障模拟试验和休眠模式测试.
(3)整列低速动态试验主要包括制动试验测试、保持制动指令测试、电空配合试验、最大常用制动试验、紧急制动EB试验、紧急制动UB试验、保护功能试验、清洁制动试验、比例制动试验、机车救援列车管保压试验.
6 结论
货运动车组的制动系统完全由我国自主设计和制造,解决了相关技术难题,实现了货运动车组制动力针对大范围变化的空重车的调整功能、加大了大载荷量下的基础制动热容量、开发高性能防滑控制系统以及为节省货运空间而实现了相应的远程控制功能.
货运动车组样车将开展一系列的型式试验和运用考核工作,制动系统将迎来进一步的考验,这一过程将逐步积累适合货运动车组制动系统技术的不断提高,相信在不久的将来,随着我国的快捷货运运输体系的建立和完善,高速动车组的制动系统技术会不断的提升.
猜你喜欢
党员干部之友(2021年9期)2021-09-18
当代陕西(2021年13期)2021-08-06
学校教育研究(2020年11期)2020-06-08
海峡姐妹(2020年2期)2020-03-03
伙伴(2020年1期)2020-02-14
科技与创新(2019年2期)2019-02-14
船海工程(2018年6期)2019-01-08
无人机(2018年1期)2018-07-05
校园英语·中旬(2017年16期)2018-01-27
无人机(2017年10期)2017-07-06