落地林果收获机器人设计
2020-12-31 01:08郑东臣宋欣冀鹏飞陈娟娟马磊郑志伟
天津农学院学报 2020年4期
郑东臣,宋欣,冀鹏飞,陈娟娟,马磊,郑志伟
落地林果收获机器人设计
郑东臣1a,宋欣1a,通信作者,冀鹏飞1a,陈娟娟1a,马磊2,郑志伟1b
(1. 天津农学院 a. 工程技术学院,b. 水利工程学院,天津 300392;2. 约翰迪尔(天津)有限公司,天津 300457)
针对当前我国在林果收获作业中存在的机械化程度低、劳动强度大、作业效率低和人工成本高等问题,提出设计一种落地林果收获机器人。该机器人主要由捡拾器、输送机构、水平摆动机构、集果器、太阳能供电装置和自走式移动底盘组成,能够实现核桃、栗子、大枣等落地林果的自动捡拾、清杂和收集功能,能够自主适应果园的地形条件,作业灵活,操作简单。经过物理样机性能测试表明具有较高的捡拾效率和捡拾成功率。
落地林果;收获机器人;捡拾器;水平摆动机构;集果器
近年来,我国各类林果栽植面积一直迅猛增加,林果产业已成为我国种植业中位列粮食、蔬菜之后的第三大产业。林果收获作为果园生产全过程中的重要环节,具有季节性强、劳动密集等特点,所用劳动力数量约占整个生产过程的35%~45%[1]。常见的林果收获方式主要有树上果品一次性联合收获和树上果品摇落—集果—捡拾的分段收获。由于我国果园种植密度大,果园地表情况复杂多样,大型林果收获机和接果装置无法在果园灵活作业,所以分段收获方式更加适合于我国的果园收获作业[2]。但是,我国林果收获作业机械化程度较低,特别是捡拾环节主要还是依靠人工完成,存在劳动强度大、作业效率低和人力成本费用高等问题,严重制约了我国林果产业的健康发展。因此,对于林果自动化收获机械的需求也日益紧迫。
早在二十世纪五六十年代,国外学者就对林果收获机械进行了研究,如SEMEK自走式榛子收获机[1]、CROFT发明的自走式山核桃收获机[3]等。但是,这些国外设备一般体型较大,作业不灵活,与我国的果园条件和林果收获方式无法相适应。近年来,我国也开展了相关研究,如石河子大学研制的4ZZ-2Y型红枣收获机[4],通过装在旋转轴上的树脂片对落地红枣实现集条,利用入土的弯形钢齿进行捡拾。由于树脂片安装缺少自由度,弯形钢齿不具备仿形功能,因此作业效果欠佳。冯冰等发明了一种具有毛刷聚拢和抖动式拾果功能林果收获机[5],但该设备容易扫入树叶树枝等杂物,存在输送堵塞或卡绊,后续分拣困难等问题。此外,石河子大学还研制了一种气吸式红枣收获机[6],在实际使用中发现吸入杂物堵塞管道,气流致使地面尘土扬起导致作业环境恶劣,需要人工扶持,捡拾效率低等问题。
针对上述现有林果收获机械存在的问题及我国林果产业对收获机械的实际需求,本研究提出一种集捡拾、清杂和收集功能于一体的落地林果自动化收获机器人,适用于我国小型果园的地形条件,可提高林果收获的作业效率和质量,降低林果收获的人工成本。
1 研究方案
1.1 工作原理
落地林果收获机器人,主要由捡拾器、输送机构、水平摆动机构、集果器、太阳能供电装置和自走式移动底盘组成,如图1所示。收获作业时,机器人自主移动,与地面接触的捡拾器通过自转进行果实的捡拾,同时该捡拾器在水平摆动机构的带动下,在地面上往复滚动,增强捡拾效果。当该捡拾器充满后,双链条输送机构开始工作,捡拾器顺时针旋转,使得第2个捡拾器到达地面位置开始捡拾工作,在这一过程中,水平摆动机构持续工作,一方面带动捡拾器往复滚动,另一方面可以让前一个捡拾器在摆动过程中进行清杂。当第2个捡拾器充满后,继续顺时针输送,使第3个捡拾器到达工作位置,同时第一个捡拾器达到集果器上方中间位置,停止输送,捡拾器在集果器表面凸起的作用下,相邻弹簧丝被撑开,收集到的果实开始掉落到集果器中。此时,启动水平摆动机构,加速果实的掉落,当捡拾器中果实完全掉落至集果器后,便完成了一次完整的捡拾集果过程。如此循环,即可实现落地林果的自动连续捡拾和收集。

图1 落地林果收获机器人结构示意图
注:1. 太阳能板;2. 捡拾器;3. 集果器;4. 自走式移动底盘;5. 水平摆动机构;6. 输送机构
1.2 主要结构设计
1.2.1 自走式移动底盘
由于果园地面条件复杂多样,移动底盘需要具备一定的地形适应性和稳定性。因此,机器人自走式移动底盘采用了越野轮四轮驱动和减震底盘的设计方案。底盘转向通过调整两侧轮子驱动电机的转速和正反转来实现,可达到较小的转弯半径,满足小型果园的作业需求。移动底盘主要设计参数如表1所示。

表1 移动底盘主要设计参数
移动底盘在行进过程中要克服的阻力主要有:滚动阻力、空气阻力、坡度阻力和加速度阻力,这些阻力均由驱动力来克服。
(1)滚动阻力F
滚动阻力在底盘行进过程中,主要由车轮轴承阻力和车轮与地面间的滚动摩擦阻力组成,其数值为13.16 N。滚动阻力计算如表2所示。

表2 滚动阻力计算 N
其中,——车轮与地面间的压力,小车自重15 kg,最大载重量为50 kg,因此最大整车重量为65 kg,一般情况下,底盘前行过程中四轮同时着地,各轮的压力为=159.25 N;
——车轮轴直径,=22 mm;
——车轮直径,=125 mm;
——车轮轴承摩擦因数,取值0.015;
——车轮承受载荷,=159.25 N;
——果园地面摩擦阻力系数,取值0.08。
(2)空气阻力F
由于移动底盘运动速度较慢,在一般作业条件下,空气阻力的影响可忽略不计。
(3)坡度阻力F
移动底盘实际行进的地面并非理想化绝对平整,而是存在一定的坡度,当底盘行驶到该坡度处时,重力将产生一个沿着坡度方向的阻力,这个阻力即为坡度阻力。
F=sin=65×9.8×sin10°=110.61 N(1)
式中:——底盘满载总重量;
——最大坡度,=10°。
(4)加速度阻力F
底盘加速时,需克服总体质量产生的惯性力,这个惯性力即为加速度阻力。
F==1.04×65×0.5=33.8 N (2)
式中:——旋转惯量换算系数,取1.04;——满载总质量;——最大加速度。
综上可知,移动底盘的驱动力F=F+F+F+F=157.57 N。
1.2.2 捡拾器
捡拾器为橄榄球状,如图2所示,是由弹簧钢丝和两端的固定圆盘组成。捡拾作业时,机器人向前行进,处于最底部的捡拾器通过与地面的摩擦作用使其产生自转。同时,受到地面果实的挤压作用,可将与地面接触的相邻弹簧钢丝撑开,使得果实进入到捡拾器内部,从而实现果实捡拾。当触地弹簧丝转离地面时便可恢复形变,从而确保收集到的果实不会掉落出去。由于弹簧丝具有弹性和柔韧性,对果园的地形条件能够具备一定的仿形功能,可以保证捡拾效果,并且还能够将对果实的损伤降到最低。
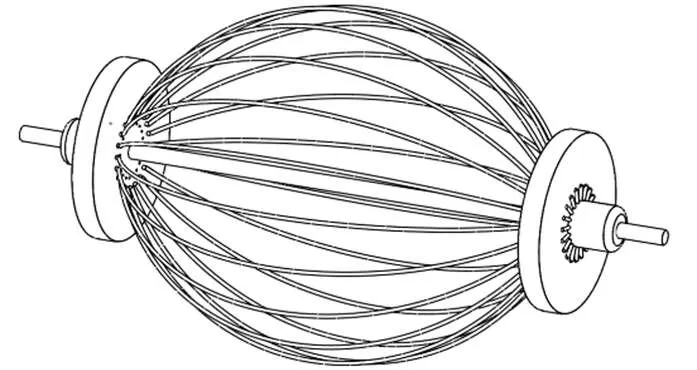
图2 捡拾器
(1)弹簧钢丝的选择
常用的弹簧钢丝材料有碳素弹簧钢、不锈钢和有色金属合金。其中,碳素弹簧钢价格低廉,经热处理后具有较好的强度和韧性,但是弹性极限低,多次使用后容易失去弹性。不锈钢材质具有良好的硬度、弹性和成型性,且价格适中。有色金属材质具有耐磨、耐腐蚀和防磁等特性,一般用于有特殊要求的场合。根据捡拾器使用要求,选用具有一定强度和弹性的304不锈钢弹簧钢丝。
由于弹簧钢丝的直径会对捡拾效果产生很大影响,因此,分别采用直径为0.8、1.0、1.2、1.5、1.8 mm的5种钢丝制作了捡拾器,并对每一种捡拾器的使用效果进行了试验对比。结果表明,如果钢丝直径过粗,钢丝比较硬,需要很大的外力才能使其变形,导致果实难以压入,而且也增加了果实取出的难度。钢丝直径过细,钢丝会比较软,容易变形,会导致果实从捡拾器中掉落出来。经过多次试验比较,最终确定用直径1.5 mm的弹簧钢丝制作捡拾器捡拾效果最佳。
(2)弹簧钢丝的均布数量
捡拾器最大直径为180 mm,沿圆周方向均布弹簧钢丝的数量由可捡拾果实的最小直径决定。以捡拾果实的直径在20~50 mm范围为例,捡拾器最大直径处的周长为565.2 mm,弹簧丝沿圆周均布数量约为28根,但考虑到要保证被捡拾的果实不易掉出,弹簧钢丝的实际数量确定为30根。
1.2.3 输送机构
输送机构主要用于输送捡拾器至捡拾位置和集果位置。如图3所示,输送机构采用双链条传送方式,由链轮驱动链条运动从而实现捡拾器的顺时针转动。链条传送无弹性滑动和打滑现象,平均传动比准确,工作可靠,效率高;传递功率大,过载能力强,相同工况下的传动尺寸小;所需张紧力小,作用于轴上的压力小;能在高温、潮湿、多尘、有污染等恶劣环境中工作。采用双链条传送可以确保捡拾器的平稳转动。

图3 输送机构
(1)链传动设计要求
传动比为1,初步拟定链速为0.12 m/s(捡拾器工位间切换时间约为4 s);链轮齿数选择要考虑减少多边形效应,传动平稳性,动荷载及链条磨损;链传动在保证承载力条件下,结构尽量紧凑。
(2)链轮链条选型
链条:根据国家标准,选用短节距滚子链08A-1,滚子直径7.95 mm,节距12.7 mm,链节数151,链条长度1917.7 mm;
链轮:齿数22,分度圆直径89.32 mm,齿顶圆直径97.19 mm,齿厚7.3 mm,中心孔径16 mm,中心孔键槽宽6 mm,键槽深2.8 mm。
1.2.4 水平摆动机构
水平摆动机构,如图4所示,其主要作用是利用曲柄滑块机构的工作原理实现除移动底盘外的其他机构一起做水平往复运动。该机构主要有3个作用:

图4 水平摆动机构图
第一,在不影响底盘行走的前提下,实现捡拾器对一定区域的反复捡拾,提高捡拾效果;
第二,通过水平摆动机构带动捡拾器运动,使得里面的果实可以产生相对运动,从而增强捡拾器的清杂效果;
第三,能够加速处于集果位置的捡拾器中果实落入集果器中,降低果实之间、果实与捡拾器钢丝之间的卡绊。
(1)水平摆动机构的运动分析
如图5所示,设曲柄长为=60 mm,连杆长为=103.85 mm,滑块运动的两个极限位置分别是曲柄和滑块连杆夹角为0°(位置A)和180°(位置B)。位置A处滑块位移为43.85 mm,位置B处滑块位移为163.85 mm,由此可知滑块最大可移动距离为120.00 mm。利用Matlab对机构运动进行分析,分别得到滑块位移和速度随时间的变化规律,如图6所示。

图5 水平摆动机构滑块极限位置示意图
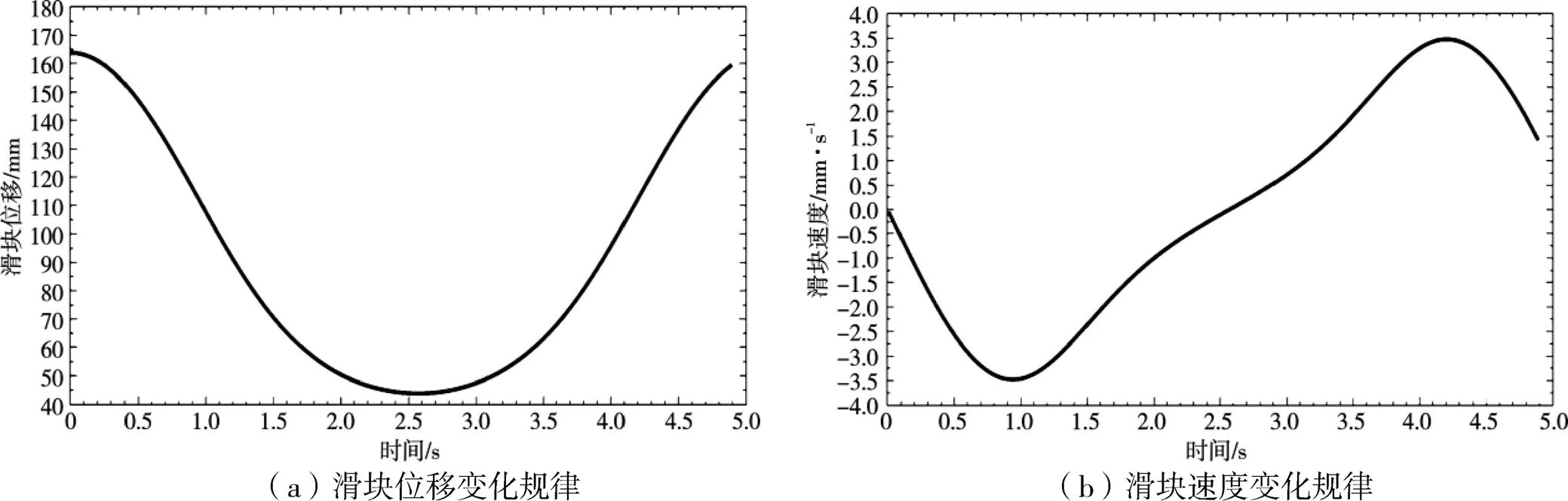
图6 水平摆动机构运动分析
(2)水平摆动机构驱动电机的选型
水平摆动机构的运动特性决定了该机构的使用效果。通过对水平摆动机构进行运动学分析以及根据物理样机的测试试验发现,当曲柄转速=28 r/min,且往复摆动角度为90°时,该机构具有良好捡拾和清杂效果。滑块的移动距离约70 mm,往复运动一次的时间约为2.3 s。考虑到水平摆动机构要驱动的负载约为60 kg,确定选用型号为60GA775的低速大扭矩直流减速电机,其性能参数如表3所示。

表3 电机性能参数
1.2.5 集果器
集果器(图7)位于移动底盘的正上方,顶部开矩形槽,槽的两侧有连续的弧形凸起,下面设有抽屉,用于盛放果实。当捡拾器传送至集果器上方时,与弧形凸起产生挤压作用,相邻弹簧钢丝被撑开,间隙变大,果实落入集果器中。

图7 集果器
2 物理样机及性能测试
落地林果收获机器人的物理样机如图8所示,其整机外形尺寸为长700 mm、宽500 mm、高 710 mm;作业幅宽200 mm;可捡拾果实直径范围为20~50 mm;机器人最高行进速度为1.256 m/s。

图8 落地林果收获机器人物理样机
经过性能测试可知,捡拾作业行走速度为0.16 m/s时,捡拾效果最佳;以地面果实均匀散落密度为37~42个/m2进行多次测试,平均需要30.8 s完成,捡拾成功率为86%~93%。
3 结语
落地林果收获机器人具备捡拾、清杂和收集功能于一体,可自主作业,大大降低了林果收获的人工成本。经过物理样机性能测试表明该机器人操作简单,工作可靠灵活,具有较高的捡拾效率,并且能够最大限度地降低对果品的损失和漏检现象。该机器人的应用将有助于提高我国林果收获作业的效率和质量,缩短林果上市时间,促进我国林果产业的健康快速发展。
[1] 周远航,坎杂,李成松,等. 落地林果集果捡拾技术研究及进展[J]. 农机化研究,2017(1):256-263.
[2] 阿丽娅·热依木. 新疆特色林果业发展研究[D]. 乌鲁木齐:新疆师范大学,2012.
[3] CROFT J W. Pecan harvesting machine:United:US3597905A [P]. 1974-02-22.
[4] 付威,何荣,曲金丽,等. 自走式矮化密植红枣收获机的设计[J]. 农机化研究,2014,36(4):106-109.
[5] 冯冰,陈霁,柯望来,等. 一种果实捡拾装置及捡拾方法:CN103814695A[P]. 2014-05-28.
[6] 史高昆,马少辉. 气吸式红枣收获机的设计与实验[J].新疆农机化,2014(2):25-27.
Design of harvesting robot for falling forest fruits
Zheng Dongchen1a, Song Xin1a,Corresponding Author, Ji Pengfei1a, Chen Juanjuan1a, Ma Lei2, Zheng Zhiwei1b
(1. Tianjin Agricultural University, a. College of Engineering and Technology, b. College of Water Conservancy Engineering, Tianjin 300392, China; 2. John Deere(Tianjin)Co. Ltd, Tianjin 300457, China)
Aiming at the problems of low mechanization degree, high labor intensity, low operation efficiency and high labor cost in forest fruit harvesting in China, the design of the forest fruit harvesting robot was proposed in the paper. The robot is mainly composed of gatherer, conveying mechanism, horizontal swing mechanism, fruit collector, solar-powered device and self-moving mobile chassis, which can realize the functions of automatic picking up, cleaning and collecting of the falling forest fruit such as walnut, chestnut and jujube. It is flexible and easy to operate, and has good adaptability to the topography of orchards. The performance test of the physical prototype shows that it has high collecting efficiency and success rate.
falling forest fruit; harvesting robot; gatherer; horizontal swing mechanism; fruit collector
1008-5394(2020)04-0068-05
10.19640/j.cnki.jtau.2020.04.013
TH122
A
2020-03-24
国家级大学生创新创业训练计划项目(201910061008);天津市科技支撑重点项目(18YFZCSF00650)
郑东臣(1999—),男,本科在读,主要从事农业机械设计方面的研究。E-mail:1013558634@qq.com。
宋欣(1979—),女,副教授,博士,主要从事现代农机装备(智能农机装备)设计及理论研究。E-mail:songxin-tju@163.com。
责任编辑:杨霞
猜你喜欢
花火A(2021年3期)2021-11-08
求学·理科版(2017年10期)2017-12-19
婚姻与家庭·性情读本(2017年1期)2017-02-16
山东工业技术(2016年15期)2016-12-01
故事林(2016年10期)2016-05-20
专用汽车(2016年4期)2016-03-01
汽车维修与保养(2015年6期)2015-04-17
汽车维护与修理(2015年5期)2015-02-28
散文百家(2014年11期)2014-08-21
中国火炬(2010年10期)2010-07-25