
Spinlaunch 运载器旋转发射技术方案分析
2020-12-31 01:47王欢欢陈安宏童明波
导弹与航天运载技术 2020年6期
王欢欢,陈安宏,陈 林,童明波,滕 锐
(1.南京航空航天大学航空学院,南京,210016;2.空间物理重点实验室,北京,100076)
0 引 言
低成本、快响应的卫星发射技术是商业航天一直以来追求的目标[1,2],特别是小卫星及微纳卫星具有成本低、研制周期短、技术更新快等显著特点,在民用各领域和军事应用方面具有很高的价值。
航天领域对发射系统不断深入研究[3,4],美国初创公司(Spinlaunch)提出“太空弹射器”方案[5,6],目标是2020 年通过首飞测试,2022 年实现首次商业发射,总目标是实现近地轨道运载能力约为100 kg,每次发射成本不超过50 万美元,每天能够进行5 次发射,能够实现低成本快速响应进入空间。这种旋转发射方案中,运载器初始加速段不再使用毒性强烈、危险性较高的化学推进剂作为火箭燃料,而是使用电能驱动离心机,利用离心力对运载器进行加速,运载器依靠初始速度惯性飞行脱离大气层,随后运载器在火箭发动机作用下将载荷送入预定轨道。目前,Spinlaunch 公司已经完成了一个直径12 m 的离心机(目前是世界第六大的离心机),并对卫星上的太阳能电池、无线电系统、望远镜镜片、GPS 设备、电池、计算机等设备进行了测试,用于验证上述硬件所能承受的力学载荷。
1 任务飞行方案
旋转发射采用地面旋转加速,惯性穿过大气层,单级入轨[6]的技术方案,如图1 所示。发射系统主要由一个旋转加速发射装置(大型离心机)和一个运载器组成,运载器采用主动流动控制技术降低在大气层内高速飞行过程中的热载荷问题[7],如图2 所示。任务开始时,首先将运载器可靠固定在发射装置中的离心机上,然后发射装置中的抽气机工作以实现真空环境,利用离心机旋转加速运动将运载器加速到预定发射速度,运载器迅速脱离离心机,由旋转运动转为切向直线运动,从发射装置出口发射,以一定速度沿30°发射角在大气层中惯性飞行,在气动阻力作用下运载器速度在不断降低,高度迅速增加,当运载器飞行高度达到60 km 时,运载器火箭发动机点火工作,以一定弹道倾角加速飞行,飞行末段发动机关机,释放载荷进入近地轨道飞行。

图1 旋转发射方案示意Fig.1 Spin-launched Vehicle Technical Conceptions

图2 旋转发射方案中的运载器Fig.2 Vehicle of Spinlaunch Company
2 入轨能力分析
运载器从离心机出口发射后,从地面以30°发射角惯性飞行,在飞行过程中主要分为惯性飞行段和主动飞行段。惯性飞行段,运载器受气动力与地球引力共同作用,高度逐渐增加,速度降低;飞行高度到60 km时,气动力影响可忽略不计,发动机点火将载荷送入轨道。
2.1 惯性飞行段
运载器经发射装置中的离心机进行旋转加速后,以速度0v 从地面进行发射:

对于旋转发射方案,运载器固定在离心机悬臂端点,r 为离心机有效悬臂长度,ω 为旋转加速终点的瞬时旋转角速度。
在惯性飞行段,运载器飞行速度由于重力和阻力作用[8],速度降低,飞行过程中速度为

式中 Δvg为重力损失项;ΔvD为气动阻力损失。
重力加速度随高度变化关系为

式中 R 为地球半径,平均半径为6371 km;h 为飞行高度;M 为地球质量,M =5.965×1024kg;G 为引力常数,G=6.672×1011(N·m2)/kg2。
运载器在飞行过程中不断向上爬升,就必须克服地球引力,由此带来的速度下降为重力损失,在速度系下有如下关系:

式中 θ 为弹道倾角;t 为飞行时间。

惯性飞行段运载器以低阻力状态飞行,减少能力损失,飞行攻角近似为零;动力飞行段必须有效降低弹道倾角,为卫星入轨提供有利条件,则俯仰角近似等于弹道倾角:

气动力在发射系下分解为

式中 CD为气动阻力系数;q 为动压;Sm为参考面积。
阻力损失为

式中 m0为运载器质量。
则惯性飞行段终点速度为

在发射坐标系下,速度分解为水平方向速度和垂直方向速度:
式中1vτ为发射系水平方向速度; v1v为发射系垂直方向速度;1t 为惯性段飞行时间。
飞行高度由下式确定:

当飞行高度达到60 km 时,可解算 1t ,进而确定惯性段相关参数。
2.2 主动飞行段
运载器在惯性飞行段结束后,火箭发动机点火工作。火箭发动机理想飞行速度按照齐奥尔科夫斯基公式:

式中 Isp为火箭发动机比冲;1m 为主动段终点质量。则运载器在主动段的飞行高度为

式中 vi为任一点的火箭发动机理想飞行速度;1m 为主动段终点质量;η 为主动段速度倾角。
当载荷轨道高度确定时,根据式(12)可确定η。
发射系下终点飞行速度为

2.3 入轨能力分析
运载器总质量由有效载荷、发动机、过渡段与整流罩等质量组成。

式中fm 为发动机质量;mj为考虑结构防隔热、整流罩等质量;pm 为有效载荷。
助推级考虑一级常规火箭发动机,取发动机质量比0.9。
依据运载器质量模型和飞行动力学模型,可以得出飞行终点的速度:

可以确定入轨速度与运载器总质量的关系,根据式(15)关系获得不同发动机条件下的运载器初始质量。

图3 全弹规模与入轨能力关系Fig.3 Relationship between Total Missile Mass and Orbit-entry Capability
采用固体发动机比冲一般低于2500 m/s,难以满足入轨要求,需采取液体火箭发动机方案。液体发动机比冲较高,比冲在4000~4500 m/s 时,全箭规模在1800~2500 kg 量级,最大有效载荷占比在4.5%~5.5%。
3 发射方案分析
发射装置是一个直径100 m 的大型真空结构,主要部件包括钢结构真空腔、主电机、旋转臂、发射通道和火箭释放装置。钢结构真空腔利用真空泵,能够在1 h 内达到中等真空水平;离心机在90 min 内加速到450 r/min;旋转臂一端安装火箭,另一端安装有配重,在火箭释放的同时释放;发射通道内采用高速机械气闸,配有声波阻尼板;火箭释放装置采用具有失效安全保护的机械分离系统,分离时间的精度能够控制在毫秒级;离心机(发射装置)和地面夹角为30°。
旋转发射方式有3 种:a)悬臂拉力式,运载器固定于悬臂端部,离心机带动悬臂旋转加速,到达规定速度时,运载器分离,沿旋转切线方向抛射;b)弧形壁面支撑式,运载器固定于弧形导轨上,导轨固定在弧形壁面上,离心机转动带动运载器沿环形滑轨运动加速,离心机仅提供运载器加速的能量,到达发射速度时,环形导轨变为直线导轨,运载器沿导轨方向飞出;c)动量抛射式,运载器固定在出口部位,离心机带动大质量悬臂旋转加速,到达规定速度时,悬臂端部沿滑轨切向滑出,与运载器钩挂,利用动量将运载器抛射。
3.1 悬臂拉力方案
对于旋转结构,悬臂拉力方案如图4 所示,需设计有配重以保证运行平衡。
由于悬臂长度规模大,以及结构强度需要。高强度钢屈服强度在1370 MPa 以上,抗拉强度1620 MPa以上,考虑到降低成本与安全性需要,结构应力为

式中 F 为悬臂所承受的向心力;S 为悬臂横截面积。
悬臂质量至少为

式中 ρ 为悬臂材料密度;l 为悬臂长度。
则平均功率需求为

式中 W 为系统所需的总能; Jb为转动惯量。
设悬臂为匀质梁,转动惯量为
角速度为ω=47.1rad/s=2700(°)/s。发射时间误差1 ms 时,角度偏差2.7°;当要求发射角度误差在1°以内时,发射时间误差在0.37 ms,对控制系统能力要求较高。
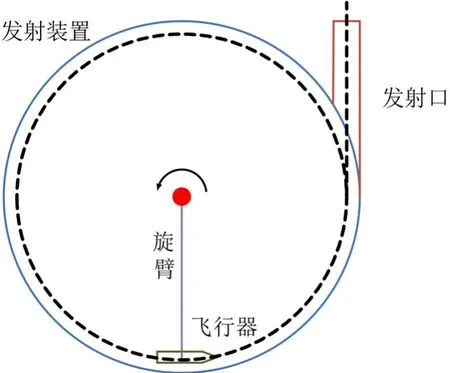
图4 悬臂拉力方案示意Fig.4 Cantilever Tension Scheme
3.2 壁面支撑方案
运载器固定于壁面的弧形导轨上,离心机转动带动运载器沿环形滑轨运动加速,如图5 所示。

图5 壁面支撑方案示意Fig.5 Wall Support Scheme
壁面最大压力为

滑轨车最大摩擦力为

式中 FNmax为运载器环形运动最大离心力;μ 为摩擦系数。
滑轨强度需满足:

滚动摩擦系数[10]取0.001 时,摩擦力为222 kN。
平均功率需求为

当匀加速运动时,能量为

运载器沿导轨方向发射,精度较高。发射窗口时间为

考虑50%余量,导轨发射端需在90 ms 内完成由环形到直线状态的转换,对机械作动机构提出较高要求。
3.3 动量加速方案
运载器固定于滑轨车上,当辅助发射器达到一定速度时,与上面级钩挂,两体加速至发射速度进行发射。

式中am 为辅助发射器质量;为运载器发射速度。
这种发射方式避免了因运载器旋转运动带来的法向过载问题,运载器在加速过程中受到很大的轴向冲击,需要设置有效缓冲结构减缓冲击。且运载器发射速度受辅助发射器质量影响严重,必须有较大的辅助质量才能有较高的初速。动量加速方案中运载器沿导轨方向发射,初始精度较高。
4 技术难点分析
4.1 大向心载荷下的结构设计技术
运载器在离心机作用下旋转运动,在90 min 内旋转加速到450 r/min,此时运载器面临的向心过载达11 000 g 以上,给运载器、载荷、发动机、内部设备等的结构设计带来了极大的挑战。运载器所承受的向心载荷方向主要为飞行器法向,且作用时间较长,对于具有较大长细比的运载器结构来说是非常不利的,同时由于运载器不同结构部位到离心机转轴中心的距离不同,受到的离心力也就不同,从而引起运载器不同结构部位的结构内力问题。需要详细分析设计运载器结构、载荷设备连接方式、发动机燃料贮存、运行测试设备信号传输等问题,才能形成合理可行的结构设计技术方案。
4.2 真空充气增压设计技术
飞行器在发射阶段,以极快的速度从真空环境进入到地面稠密大气,为避免大气密度急剧变化引起的壁面效应,在飞行器进入大气之前,需要在真空室内注入大气以降低内外压差,保证飞行器环境连续稳定过渡,同时为开启发射通道提供有利条件。若压力增加过快,则飞行器遇到的阻力迅速增加,带来的气动热问题也更加严重;若压力增加慢,则增压时间加长,离心机将面临严重的摩擦热以及能量损失,飞行器总加热量也将增加。充气增压设计需充分考虑飞行器与离心机面临的气动摩擦问题。同时通气增压过程中,气流扰动对运载器分离释放也可能产生不利影响。
4.3 毫秒级精确发射控制技术
运载器在离心机上旋转加速,末端旋转速度450 r/min,即飞行器角速度2700 (°)/s。当发射装置发射时间误差在1 ms 时,飞行器发射角度偏差2.7°,则飞行器难以准确进入发射通道进行发射;即使飞行器进入发射通道,至惯性段末点60 km高度时,在射面方向上估计散布误差为5.6 km,可能会影响入轨精度,需弹上控制系统全程参与以保证入轨精度。为提高控制精度,在满足热环境约束的前提下,惯性段可采取气动力控制以保证点火点控制需求,以拟定点火点在平面的投影位置为导引;主动段可采用直接力控制或者姿控动力系统进行控制,以入轨点高度、速度为目标,通过主动力控制提高系统入轨精度。发射系统需要精确控制发射时间,以保证发射精度,但要控制在1 ms 以下时,特别是还存在飞行器解锁释放、真空室通气加压、发射管道打开等动作过程,目前技术上难以实现。
4.4 稠密大气高速飞行防隔热设计技术
在惯性飞行阶段,运载器从地面飞行沿30°发射角在惯性力和气动力的作用下爬升至60 km,这一阶段主要在大气层内飞行,运载器面临严酷的热环境。初步估算飞行器的驻点热流,按照工程估算公式分析:

式中dR 为飞行器头部曲率半径;1C 为与飞行器特性相关的系数;ρ 为飞行高度的大气密度;0ρ 为海平面大气密度;V 为飞行高度的速度;cV 为飞行高度的声速。
按照公式分析,端头驻点热流30.4 MW 以上,与返回舱再入环境相当。返回舱一般采用大曲率半径的外形,以降低气动热;同时采用烧蚀型防隔热方案,以保证返回舱安全。而运载器惯性飞出大气层,同时要有较小的能力损失,就无法采用类似返回舱的防隔热方案,必须采用小曲率半径的低阻力气动外形布局方案,同时采用微烧蚀防热方案或者主动喷流方案,由于运载器在大气层内飞行时间小于60 s,且运载器按照低阻力外形设计,飞行过程中阻力增加不超过20%时,仍可以满足入轨需求。
5 结 论
本文对旋转发射方案的入轨能力和发射方案进行了分析,通过建立惯性飞行段、主动飞行段运动学模型,得出全弹规模与入轨能力关系。结果表明,采用一级常规液体火箭发动机时基本满足入轨需求。
对3 种可能的发射方案进行了分析,表明:a)地面旋转加速消耗功率巨大,需要专门的配套供电设施;b)悬臂拉力式功率最小,但运载器承受过载非常大,发射控制精度要求非常高;c)弧形壁面支撑式功率较大但发射控制精度相对悬臂拉力式有所改善,毫秒量级的控制能力同样要求较高;d)动量加速方案中,运载器要承受较大的轴向冲击过载。
旋转发射作为一种新型的低成本发射技术,显著提高初始发射速度,避免了常规火箭发射中一级飞行段的能量损耗以及由此带来的经济损失,具有一定的入轨能力。但也存在很多的技术难点,长时间承受大向心载荷下的结构设计技术、快速可控的真空充气增压设计技术、毫秒量级的精确发射控制技术、稠密大气内高速飞行的防隔热设计技术,都会影响旋转发射技术的实现。未来随着在精确控制技术、真空设计技术、结构防隔热技术研究方面的突破,旋转发射技术可以真正实现低成本高频率的发射,具有很高的商业价值。
猜你喜欢
宁夏医科大学学报(2022年6期)2022-11-22
宁夏医科大学学报(2022年8期)2022-11-22
北京航空航天大学学报(2022年6期)2022-07-02
交通科技与管理(2022年8期)2022-05-07
载人航天(2021年5期)2021-11-20
百科探秘·航空航天(2019年8期)2019-08-01
三联生活周刊(2017年1期)2017-01-11
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
中学生数理化·八年级物理人教版(2014年2期)2014-04-02
