
研磨机摇臂轴实验装置系统设计
2020-12-29 07:57王英英
机电信息 2020年36期
张 军 王英英 董 会
(中国工程物理研究院机械制造工艺研究所,四川绵阳621900)
0 引言
研磨机主要用于KDP晶体化学机械抛光(CMP)的实验研究,CMP技术由于化学作用和机械作用同时参与,且抛光过程化学反应复杂,难以实现可控,涉及的参数较为复杂,因此,研磨机的稳定驱动控制对于有效实现KDP晶体化学机械抛光具有关键性作用。
为此,根据研磨机实验过程的要求和现场情况,结合市场调研,通过设计加装用于主动控制工件转速的旋转摇臂轴以实现工件转速可调,从而减少由于仪器本身所产生的不可控因素。通过改造加装了摇臂轴控制系统,在保证主转盘公转的前提下,又实现了研磨样品的自转,且方向、速度均可调,抛光环的速度在20~70 r/min区间段均匀可调,样品速度在20~70 r/min相应可调,速度波动率为±3 r/min。以下将从研磨机构总体结构设计、电气控制系统设计、控制系统调试等几个方面进行详细介绍。
1 研磨机构结构设计
通过前期调研和试验,自行设计的研磨机构总体结构如图1(a)所示,抛光研磨机的运转主要包括主转盘公转和研磨环即研磨样品的自转两部分,主转盘的公转方向分为顺时针公转和逆时针公转;研磨环的运转由步进电机带动小齿轮运转,小齿轮作为主动轮与研磨环上半部分齿轮啮合,带动研磨环即研磨样品自转,同时导向轴承与研磨环下半部分相切,起到了导向研磨的作用。研磨抛光机运转示意图如图1(b)所示。自主设计的抛光研磨机摇臂轴结构大大改善了研磨抛光机的功能,在保证主转盘公转的同时,又实现了研磨样品的自转,且方向、速度均可调,通过设置不同的公转和自转参数,可实现研磨样品抛光轨迹均匀。

图1 研磨机构
根据研磨机使用要求和现场情况,研磨环外径95 mm,内径81 mm,厚29.5 mm;限位轴承外径30 mm,内径10 mm,厚9 mm。两个限位轴承之间的轴心距离为100 mm。由此可利用公式(1),计算出研磨环和限位轴承之间的轴心距离为62.5 mm。

式中:a为中心距;m为模数;z1为大齿轮齿数;z2为小齿轮齿数。
该机构对力矩无特殊要求,只需尺寸满足。通过绘图选型,齿轮模数m=1,大齿轮公称直径110 mm,小齿轮公称直径15 mm。因齿轮使用力矩很小,大齿轮安装方式为台阶定位,过盈配合。
2 电气控制系统设计
根据研磨机驱动特点,初步设想了两种方案:直流调速器+直流电机和上位控制器+步进驱动+步进电机。但是考虑直流调速对模拟量要求很高,使用过程中可能会产生较大干扰,后一种方案受影响较小,故最终确定电气控制方案为上位控制器+步进驱动+步进电机。详细电气图如图2所示。
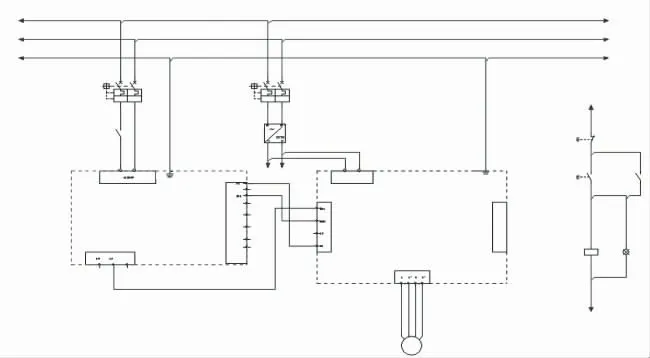
图2 电气原理图
3 总结与结论
将该研磨抛光机摇臂轴实验装置系统用于旋转重力式研磨抛光机。通过该系统对抛光样品的抛光速度进行调控,实验结果如表1所示。
旋转重力式研磨机摇臂轴智能控制系统操作方便,实现了工件自转转速稳定且可控的控制。通过设计加装用于主动控制工件转速的旋转摇臂轴,旋转重力式研磨机设备能力得到了大幅度提升。
该系统既实现了工件转速可调,又减少了仪器本身所产生的不可控因素的影响,提升了设备的能力,改善了KDP晶体化学机械抛光的效果,且提高了工作效率。

表1 改进前后转速比较表
猜你喜欢
技术与市场(2022年7期)2022-07-16
选煤技术(2022年2期)2022-06-06
石材(2022年1期)2022-05-23
新疆钢铁(2021年1期)2021-10-14
水泥工程(2020年4期)2020-12-18
军事文摘(2020年18期)2020-10-27
石材(2020年2期)2020-03-16
少儿科学周刊·少年版(2020年9期)2020-03-04
水泥技术(2019年1期)2019-02-26
汽车实用技术(2016年1期)2016-12-24
