基于Otsu优化的PCNN电力故障区域提取
2020-12-28 08:09林亚君陈学军
福建工程学院学报 2020年6期
林亚君,陈学军
(1.莆田学院 机电工程学院,福建 莆田 351100;2.新能源装备检测福建高校重点实验室,福建 莆田 351100)
红外成像技术凭借其非接触、安全可靠、检测快速等优势,成为电气设备故障在线检测的重要手段[1-2]。随着图像处理技术的发展[3],为保证在线检测的准确性和实时性,电力故障红外图像处理自动化应运而生[4-5]。作为红外图像与故障分析的桥梁,如何有效地提取故障区域成为科研的热点[6-7]。
通常,红外图像中故障区域具有固有的特征:(1)呈亮黄色,亮度高于非故障区域;(2)与非故障区域之间有一定边界。基于这两个特征,文献[8]提出采用Otsu算法(大津法)将电气设备作为目标区从背景图像中分割出来;文献[9] 采用K-means聚类算法对电力设备红外图像进行分割,并用马尔可夫模型进一步优化。然而,基于阈值分割的方法通常由于其阈值会偏向方差大(电力故障区域往往较小,背景的方差较大)的一侧导致误分割,改变了故障区域的特征信息,从而增加后续故障识别的难度。PCNN模型具有生物特
征的乘积耦合和非线性点火的特点,可以有效判别图像的目标和背景,使其在图像分割上具有极大优势,从而被广泛应用于电力故障区域提取[10-11]。PCNN模型的参数若选择不当将大大影响目标提取性能,需进一步增强图像分割自适应性。
1 基础算法
1.1 PCNN模型
基本PCNN是一种有连接域的网络模型,由若干个神经元互连形成的反馈型神经网络,具有良好的脉冲传播性能,能够完整保留图像的区域信息,在图像分割领域具有极大优势[12]。构成PCNN的神经元系统是一个复杂的非线性动态系统。其中一个PCNN神经元由3个部分组成:接收部分、非线性调制部分和脉冲产生部分,基本模型如图1所示。

图1 PCNN模型Fig.1 PCNN model
简化PCNN模型在运行过程中每个神经元按照以下步骤进行迭代计算。
接收部分:接收外部和相邻神经元的信息输入,分别为Fij、Lij输入通道。其中外部输入表示为输入图像,如式(1)所示:
Fij(n)=Iij
(1)
式中Fij(n)为(i,j)位置的神经元反馈输入,n表示第n次迭代;Iij为外部输入的图像信息。
连接通道输入Lij通过权重矩阵W接收来自8个领域神经元的信息,如式(2)所示:

(2)
式中(k,l)为8个领域神经元的图像像素位置;Wij,kl为Lij和Ykl的链接权值;Ykl(n-1)是上一次迭代后(k,l)位置的脉冲输出信号。
在这一部分中,我们试图探索房子的地理位置、经纬度、是否处于学区以及是否临近地铁站这些信息对房价的影响。这部分我们试图通过这些数据,寻找住房的外界地理环境因素对房价的影响。
非线性调制部分:调节Fij、Lij输入信号,通过耦合调制对其进行正的单位偏置,得到内部活动项Uij,如式(3)所示:
Uij(n)=Fij(n)(1+βLij(n))
(3)
其中β表示神经元突触间的连接强度,也称耦合连接系数。
脉冲产生部分:由阈值函数和脉冲产生器两部分构成。比较内部活动项与阈值的关系,当Uij≥θij(n)时,神经元发出脉冲,否则熄灭。其中阈值函数如式(4)所示,脉冲输出如式(5)所示。
θij(n)=e-αθθij(n-1)+VθYij(n-1)
(4)
(5)
式中θij(n)为随时间指数衰减的动态阈值;αθ为θij(n)的时间衰减常数;Vθ为阈值的放大系数。
从式(4)可以看出神经元点火后,由于Yij(n-1)的值跃变成1,在放大系数Vθ作用下,阈值θij(n)骤增。随后在衰减参数αθ影响下,θij(n)逐渐衰减直至下一次点火,故图像中的各神经元均具有一定的点火频率。另一方面,神经元之间存在耦合连接,点火神经元会触发其领域具有相似特性的神经元同步点火,即产生同步振荡现象,从而实现提取图像相似区域。这与提取电气设备红外图像中故障区域即亮度区域不谋而合。
1.2 二维Otsu算法
Otsu是一种自适应的阈值确定方法[13],具有计算简洁、稳定、自适应等优点,广泛应用于图像分割中。但是传统Otsu算法没有考虑图像像素点之间的位置关系,图像中如果有噪声会导致分割效果不理想。因此,刘建庄等人在1993年提出了二维的Otsu算法[14],提高了算法的抗噪性能。


(6)
(7)
对应的均值矢量分别为μb、μo:

(8)

(9)
整个图像的均值矢量为μT:

(10)
一般情况下,认为目标远离对角线的概率很小,于是有:

(11)
离散测度矩阵为:
S(s,t)=ωb(μb-μT)(μb-μT)T+
ωo(μo-μT)(μo-μT)T
(12)
图像的离散测度为:

(13)
离散测度越大,类间方差也越大,说明构成图像的两个部分的差别越大,当tr(S(s,t))取得最大值时,(s*,t*)为初始阈值,即:
(14)
在图像分割时,二维Otsu算法较传统Otsu具有更强的抗噪能力,更快的计算速度。
2 改进PCNN模型
PCNN应用于图像分割时,初始阈值的选择往往依赖于经验,如果选择不合理会导致首次迭代时的神经脉冲的错误发放,会大大增加迭代次数。如何确定合适的初始阈值至关重要。本研究选择二维Otsu算法优化初始阈值,即根据式(14)选取的最优分割阈值作为初始阈值,使其对不同图像都有一定的自适应性。
另一方面,传统PCNN 模型对图像分割时存在迭代次数无法确定问题,目前常用的迭代结束的判据是根据图像中的神经元是否全部完成点火,再选取迭代终止前一次的结果作为图像分割最终结果。这种方式不仅迭代次数过多,甚至需要人工判断迭代过程中出现的最优分割结果,与红外图像处理自动化的初衷相悖。受Otsu算法的启发,本研究采用最大类间方差作为收敛判据,即判别式为式(13)。类间方差越大,说明构成图像的明、暗两类的差别越大。若把背景或者目标错分会导致两部分的差别变小,以此作为收敛判据,不仅实现了图像自动分割,分割效果也很理想,算法流程如图2所示。

图2 图2算法流程图Fig.2 Algorithm flowchart
3 实验结果
为验证改进PCNN对电力故障区域提取的准确性与时效性,图3列出了3种常见故障的红外图像:(1)电流互感器内部缺陷,图3(a)所示为互感器B相内部缺陷,红外图像中B相位置局部发亮;(2)瓷绝缘子发热、表面污秽,如图3(b)所示3片绝缘子发亮,存在多个故障区域;(3)隔离开关内转头发热,如图3(c)所示内转头部位发亮。从图3可见,故障区域占整幅图像的比例都偏小。基于MATLAB平台对上述3种常见故障的红外图像进行测试,并与Otsu算法、K-Means算法、传统PCNN对比,测试结果及对比结果如图4~图7所示,故障提取所耗时间如表1。

图3 原始红外图像Fig.3 Infrared images

图4 Otsu算法Fig.4 Segmentation graphs by using Otsu algorithm

图5 K-means算法Fig.5 Segmentation graphs by using K-means algorithm
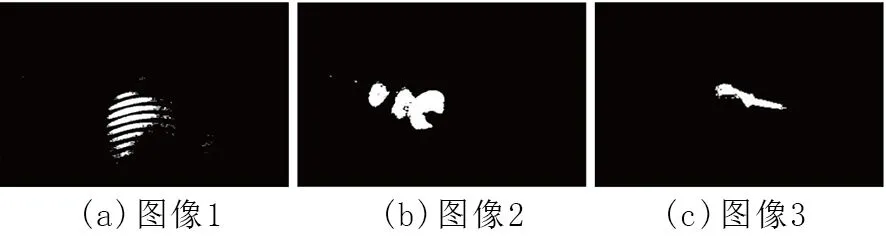
图6 传统PCNNFig.6 Segmentation graphs by using traditional PCNN
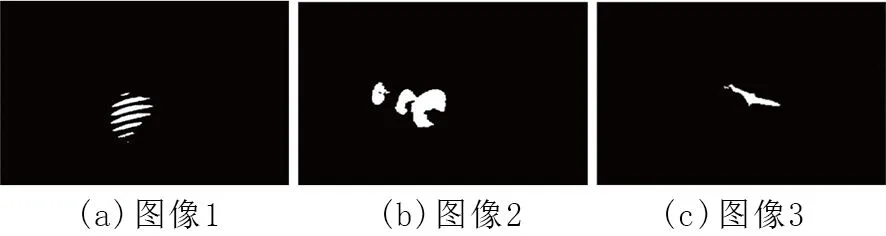
图7 改进的算法Fig.7 Segmentation graphs by using the proposed algorithm

表1 图像分割耗时Tab.1 Comparison of time consumption of different algorithms
比较图7与图4~6可见,由于电力设备红外缺陷图中故障区域很小,即原始红外图像中亮度区域较小,采用传统Otsu、K-means分割图像时会有过分割现象,而PCNN对于分割小目标具有显著优势。然而,如表1所示,PCNN的模型特性使其分割耗时大大增加。各算法具体对比分析如下:
(1)Otsu算法,综合考虑了整幅图像,但故障区域所占比例太小、故障区域边界模糊,阈值选择偏向背景,导致将一部分非故障区误分割进来造成过度分割。
(2)K-means算法,将图像分成两类,得到的分割结果基本上把目标区域融合进背景,极大地增大了后续处理的工作量。
(3)PCNN,在分割的准确性上明显优于前面两种算法,然而图6所示的分割结果并不是最终迭代结果,而是通过人为判断将迭代过程中分割效果最好的图像进行展示(图像1为收敛前一次的分割结果,图像2为收敛当次的分割结果,图像3为收敛前一次的分割结果)。这样处理不仅无法自动选取最优结果,还增加了迭代时长。当然,增加时长还有一个因素是由于初始阈值设置的不合理导致的。另一方面,与图7相比,图6的噪点明显比较严重,目标轮廓不清晰,影响后续故障类型识别。
(4)改进的算法,能够将故障区域完整、准确,并且较快速地提取出来。通过二维Otsu算法优化迭代的初始阈值,不仅可以减少迭代次数,还提高了抗噪能力。以最大类间方差作为收敛判据,实现图像自动分割。该算法吸收了PCNN模型对于小目标分割的优势,并且通过Otsu算法优化了初始值设置和迭代判据,图像分割耗时缩短,目标轮廓更加清晰,具有良好的故障区域提取性能。
4 结论
针对传统PCNN分割耗时长、目标轮廓模糊以及需要人为观察选取最优分割结果等问题,提出了基于二维Otsu算法优化PCNN的电力故障区域提取方法。通过Otsu算法计算图像的分割阈值作为PCNN迭代的初始阈值,并以最大类间方差作为收敛判据,实现最优分割自动选取。实验结果表明:
1) 该算法具有PCNN对于小目标分割的优势,相较于Otsu、K-means算法能更加准确提取电力故障区域,并且轮廓清晰。
2) 该算法优化了初始值设置和迭代判据,相较于传统PCNN,不仅能自动选取最优提取结果,并且耗时更短,抗噪性能更优。
猜你喜欢
环球时报(2022-05-23)2022-05-23
中学生数理化(高中版.高考数学)(2021年3期)2021-06-09
金桥(2021年4期)2021-05-21
中学生数理化·七年级数学人教版(2019年6期)2019-06-25
中学生数理化·七年级数学人教版(2019年6期)2019-06-25
电子制作(2019年7期)2019-04-25
电子制作(2019年7期)2019-04-25
现代装饰(2018年5期)2018-05-26
初中生世界·九年级(2017年10期)2017-11-08
中国生化药物杂志(2015年4期)2015-07-07