
用于电商物流周转箱的多功能码垛机械手设计
2020-12-25 12:31:24史晓斐王城坡
机械设计与制造 2020年12期
史晓斐,章 军,王城坡
(1.江南大学机械工程学院,江苏 无锡 214122;2.江苏省食品先进制造装备重点实验室,江苏 无锡 214122)
1 引言
码垛机器人是用在工业生产过程中执行大批量工件、包装件的获取、搬运、码垛、拆垛等任务的一类工业机器人,是集机械、电子、信息、智能技术、计算机科学等学科于一体的高新机电产品[1]。广西大学发明的箱体类货物码垛机械手[2],可以调整机械手两组相对的手指开距来适应不同箱子的尺寸,但该种机械手无法抓取太重的箱体且需要箱子有一定的操作空间。广东顺德劳佰机器人科技有限公司发明的夹板式机械手手爪[3],通过调整机械手两板的距离来适应箱子的尺寸,机械手两板夹紧箱体两侧然后手指钩入箱子的底部来保证抓取方形箱体的可靠性,但该机械手要求被抓取箱体的两侧面与底面垂直。现在电商物流公司通常将货物装入物流周转箱再进行运输,使用机器人码垛物流周转箱的场景有:(1)码垛机械人将装满货物的物流周转箱垂直地放置到托盘上、并码垛多层;(2)码垛机械人将待存放的物流周转箱放置到货架上指定位置;(3)码垛机械人对取出货物后的空箱进行分离或叠放。需要设计一种可以适用于这些应用场景的物流周转箱专用码垛机械手。
1.1 码垛机械手的抓取对象
为了节省空箱运输成本,电商物流公司通常使用斜插式物流周转箱。斜插式周转箱具有优越运输特性,但现有物流周转箱的结构无法很好地满足码垛机械手的抓取要求,需要改进现有的物流周转箱结构。
改进斜插式物流周转箱主要由箱体与两块互相啮合的锯齿形箱盖组成,如图1 所示。箱体与箱盖间通过铰链连接。并且将左右方形截面条及箱盖开槽(需改进现有的模具),箱盖上还设有码垛限位块,确保装满货物且上下层码垛的物流周转箱不会滑动。
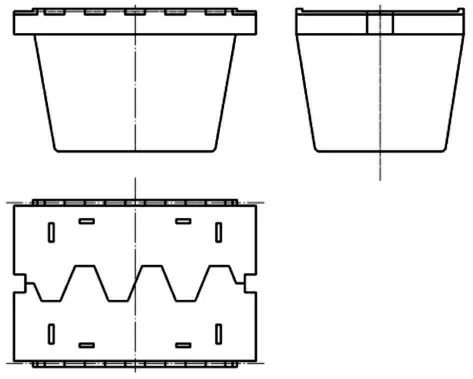
图1 改进物流周转箱示意图Fig.1 Schematic Diagram of Improved Logistics Turnover Box
1.2 机械手结构及工作原理
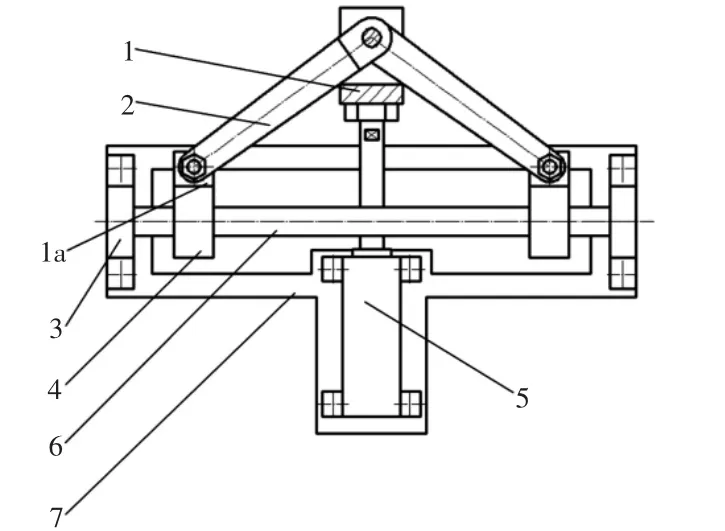
图2 机械手手掌部分结构图Fig.2 Structure Diagramof Palm Partof Manipulator
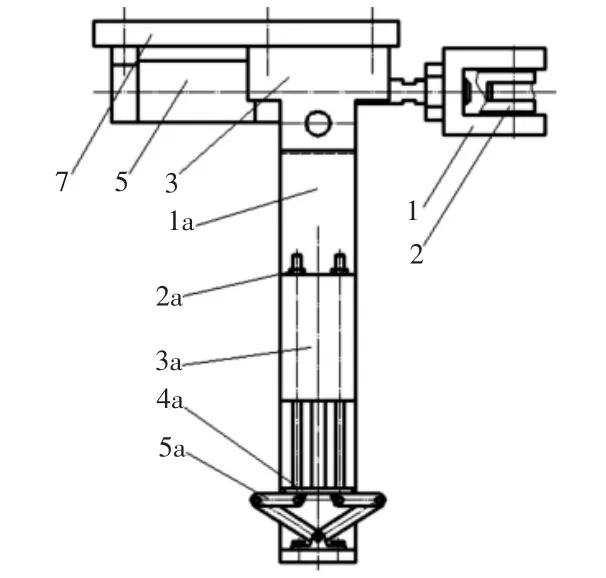
图3 机械手手指部分结构图Fig.3 Structure Diagramof Finger Partof Manipulator
可伸展又可开合的码垛机械手,由气缸驱动的增力机构夹持物流周转箱的手掌,以及双导杆薄气缸的导杆承载、厚连杆伸展为水平状态从而提升物流周转箱的手指组成[4]。码垛机械手手掌结构:两个导轨支座3、夹紧气缸5 均安装在安装架7 上,抗转矩直线导轨6 安装在导轨支座3 上,两个直线轴承4 安装在抗转矩直线导轨6 上,夹紧气缸5 的活塞杆与铰链座1 通过螺栓连接,两根连杆2通过销轴连接在铰链座1 上。码垛机械手手指结构:Z 型指板1a 通过螺钉固定在直线轴承4 上,Z 型指板1a 内侧粘贴有防滑软橡胶垫,双导杆薄型3a 气缸通过螺钉固定在z 型指板1a 的外侧,双导杆薄型气缸的两根导杆通过定做的方式加工,在导杆的后端车出螺纹并安装了两个限位螺母2a。并联双铰链支座4a 通过螺钉与气缸推板相连,两个厚连杆5a 的一端分别和并联双铰链支座相连。机械手手指通过螺钉固定在直线轴承4 上。码垛机械手手掌工作原理:向夹紧气缸5 的无杆腔通压缩空气,活塞杆伸长推动铰链座1 向上移动,铰链座1 带动两根连杆2 转动,连杆2 拉动直线轴承4在抗转矩直线导轨6 上向内运动,两个机械手指1a 间的开距变小。向夹紧气缸5 的有杆腔通压缩空气,两个机械手指间的开距变大,如图2 所示。码垛机械手手指工作原理:向双导杆薄型气缸3a 的无杆腔通气,气缸3a 的活塞杆伸长到极限位置推动气缸推板向下运动,气缸推板推动厚连杆5a 转动,厚连杆转动到水平位置。向双导杆薄型气缸3a 的有杆腔通气,气缸推板拉动厚连杆5a 转动到初始位置,如图3 所示。
2 码垛机械手的实际应用及参数计算
2.1 码垛机器人的使用场景
码垛机械手安装在机械臂上,机械臂与码垛机械手组成的码垛机器人可以采用三种方式抓取改进后的物流周转箱,分别是实箱铲运放置货架、吊运码垛或分离实箱、夹持层叠(放置或分离空箱)。针对不同的抓取条件及对象选择对应的抓取方式。
(1)实箱铲运放置货架,如图4 所示。码垛装满货物且有足够的操作空间的物流周转箱时,机械臂转动到水平,然后平移使码垛机械手的手指水平地伸在作用方型截面条的下面,向夹紧气缸通压缩空气直到活塞杆伸长到极限位置(两个机械手手指开距最小),机械手对物流周转箱没有夹持,由机械臂向上提起箱体放置在旁边的货架上。
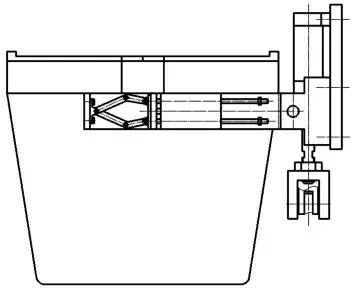
图4 机械手实箱铲运放置货架示意图Fig.4 Schematic Diagramof Manipulator’s Boxes with Goods Shovelingand Placing Shelves
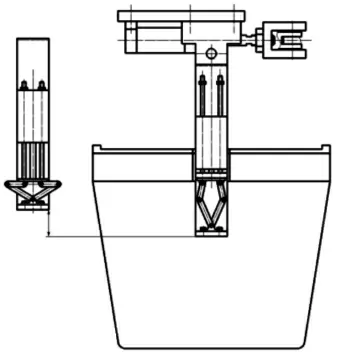
图5 机械手吊运码垛或分离实箱示意图Fig.5 Schematic Diagram of Manipulator Lifting and Palletizing or Separating Boxes with Goods
(2)吊运码垛或分离实箱,如图5 所示。上下码垛装满货物的物流周转箱时,物流箱相互紧靠且没有足够的操作空间时,机械臂转动到垂直状态,然后平移到物流周转箱槽口的位置,向夹紧气缸通气直到活塞杆伸出到极限位置(两个机械手手指开距最小),机械臂向下运动动使机械手手指垂直地伸入物流周转箱槽口内,向双导杆薄型气缸无杆腔通气,活塞杆伸出到极限位置推动厚连杆运动到水平状态起吊钩作用;机械臂向上运动使厚连杆接触方形截面条的下侧,机械手对箱体没有夹持,靠两根导杆承受箱体及货物的重量。
(3)夹持层叠(放置或分离空箱),如图6 所示。叠放空箱可以节省大量的运输空间,但也产生机械手可夹持面积小的问题。机械臂转动到水平状态,然后平移到物流周装箱方形截面条的外侧,向夹紧气缸通气使活塞杆伸长,机械手手指在夹紧在方形截面条的外侧。依靠气缸夹紧箱体产生的摩擦力来提升空箱。
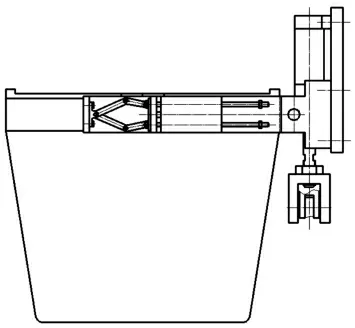
图6 机械手夹持层叠(放置或分离空箱)示意图Fig.6 Schematic Diagram of Manipulator Clamping and Stacking( Placing or Separating Empty Boxes)
2.2 机械手手掌结构各参数计算
夹紧气缸作为机械手手掌部分的驱动来调整机械手手掌的开距,并且夹紧气缸需要为机械手抓取空箱提供动力,如图7 所示。需要选择合适的气缸并计算连杆的长度。在进行空箱的分离和堆叠操作时,箱盖为打开状态。机械手水平的夹持在物流周转箱方形截面条外侧垂直面。以抓取空箱时机械手手掌部分状态作受力分析:

根据上述公式可以得到夹紧气缸推力F 与空箱自重的关系:

机械手手掌中连杆机构几何关系:

式中:F—气缸的推力;N、N′—连杆上的一对相互作用力;N1—物流周转箱与机械手间的接触力;f—物流周转箱与机械手间的摩擦力;G—空箱的重力;L1—连杆的长度;角度θ—连杆与活塞杆间形成的锐角(抓取过程中从角度θ1变为θ2,机械手水平铲运及吊起货物时变为θ3)。
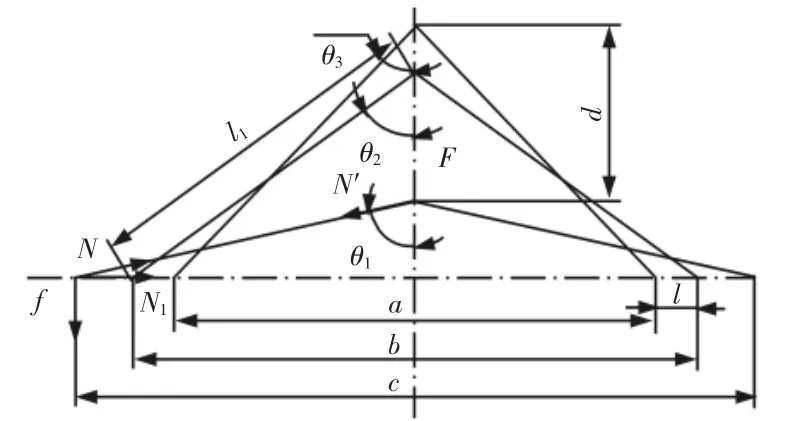
图7 机械手手掌受力分析图(夹持层叠)Fig.7 Force Analysis Diagramof Manipulator Palm
机械手手掌的最小开距a—614mm(机械手手掌水平铲运及吊起货物时的开距),机械手水平夹持空箱时机械手手掌的开距b—710mm,机械手手掌的最大开距c—830mm。d—气缸的行程,取箱子与橡胶的摩擦系数—0.56[5],安全系数—1.7,空箱的质量—5.9kg。选择气缸型号为SC32X75,气缸的内径—32mm,气缸的行程—75mm,气缸的内压力—0.5MPa。当夹紧气缸的活塞杆从初始位置伸长到极限位置时,机械手手掌开距从最大变为最小。将夹紧气缸行程及机械手手掌的开距的带入式(5)得连杆l1的长度为636mm。式(6)为机械手堆叠与分离空箱时夹紧气缸推力与空箱自重的关系式,带入参数得所需的夹紧气缸内径为28.9mm。结论:码垛机械手手掌采用了连杆增力机构,32mm 的小直径夹紧气缸在通0.5MPa 气压的情况下就可以满足码垛机械手分离和层叠空箱的需求。75mm 的气缸行程就可以实现机械手手掌开距614mm 增大到830mm。
2.3 机械手手指结构各参数计算
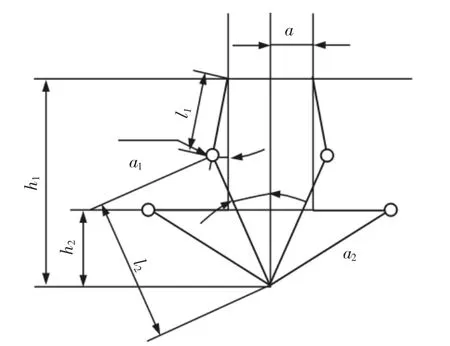
图8 厚连杆机构几何关系Fig.8 Geometric Relationship of Thick Link Mechanism
双导杆薄型气缸作为机械手手指部分的驱动来调节机械手手指的状态。需要选择合适的气缸并计算厚连杆、连杆的长度。装满货物的物流周转箱上下层码垛时,机械手手指垂直伸进方形截面条的槽内,整个手指均在槽口的范围内,厚连杆机构呈现水平状,起起吊作用,此时夹紧气缸、双导杆薄型气缸的活塞杆均伸长到极限位置。码垛机械手手指中连杆机构几何关系(初始及水平两种状态):
式中:α1、α2—初始状态下厚连杆及连杆与导杆轴线所成的锐角。l1—厚连杆的长度;l2—连杆的长度。
选择双导杆薄型气缸型号为MGPM50-12。气缸参数:最大负荷13N,标准行程—50mm,气缸内径—12mm 导杆偏移距离a—37mm,气缸整体宽度—58mm,气缸厚度—28mm。
式(9)为厚连杆、连杆和导杆偏移距离的关系式。为了方便加工假设α1=0,α2=30°,计算得连杆的长度l1为74mm。
式(8)为双导杆薄型气缸行程与厚连杆机构的运动关系式,将式(6)、式(7)代入式(8)计算得厚连杆的长度l2为25.5mm。
结论:在吊运码垛或分离实箱时码垛机械手对箱体没有夹持作用,靠两根导杆承受箱体及货物的重量。因此选用的双导杆薄型气缸内径仅为12mm 且无需通压缩空气。设计的连杆机构大大缩短了所需气缸的行程,气动系统的灵敏性及气缸较短的行程很大的缩短了码垛机械手抓取物流周转箱的准备时间。
3 结语
码垛机械手的设计,克服了传统机械手结构复杂、功能单一的缺陷。结合了现有物流周转箱的尺寸、结构及使用情况并做了开槽改进。新颖的抓取方式可以让物流周转箱以更合理的排列方式运输及储存,大大的提升了及机械手码垛可靠性并间接提升了物流运输效率。码垛机械手的手掌及手指部分采用了气缸驱动反应速度较快并能节省能源。未来手掌部分的驱动可以用步进电机来代替气缸驱动,可以更精准的控制机械手手掌的开距来适应各种尺寸的物流箱。
猜你喜欢
科技创新与生产力(2021年12期)2021-02-16 13:14:36
装备制造技术(2020年3期)2020-12-25 05:22:06
重型机械(2020年3期)2020-08-24 08:31:48
电子制作(2019年20期)2019-12-04 03:51:36
水利科技与经济(2017年12期)2017-04-22 03:10:04
集装箱化(2016年12期)2017-03-20 02:30:53
中国水运(2015年11期)2015-12-08 06:20:16
电测与仪表(2014年16期)2014-04-22 05:20:22
专用汽车(2013年2期)2013-12-10 06:49:46
中国新技术新产品(2013年19期)2013-11-16 06:27:36
