
Application of genetic optim ization lvq neural network in equipment fault diagnosis system
2020-12-23 05:16:14JunyaYANWenhuaiHUANGXiaonanWANG
机床与液压 2020年18期
Jun-ya YAN,Wen-huai HUANG,Xiao-nan WANG
(1 Information Faculty,Business college of Shanxi University,Taiyuan 030031,China)
(2 School of Information Engineering,Xijing University,Xi’an 710123,China)
(3 School of Electronic and Control Engineering,Chang’an University,Xi’an 710064,China)
Abstract:In order to improve the accuracy of equipment fault diagnosis,LVQ neural network is used to locate and identify equipment faults,and genetic algorithm is used to solve the initial weight value of LVQ neural network.In the modeling process of equipment fault diagnosis,an equipment fault diagnosismodel of LVQ neural network is established according to actual fault conditions and common types of faults,and the advantage of LVQ neural network in fine-grained fault diagnosis ofmechanical equipment is fully exploited.In order to prevent the slow convergence caused by fine-grained fault diagnosis,theweight and threshold initial value of LVQ neural network are solved by genetic algorithm,and then iterative training of LVQ neural network is carried out to obtain a stable LVQ neural network fault diagnosismodel.Experiments show that the equipment fault classification which based on genetic algorithm optimization LVQ neural network has higher classification accuracy and faster training time,compared with the traditional LVQ neural network algorithm.
Key words:Genetic algorithm,LVQ neural network,Fault diagnosis,Ompetition layer,Standard deviation
During the operation ofmechanical equipment,the parts of the equipment need to bemaintained and replaced irregularly to ensure the normal operation of the equipment even if the working environment is strong.In the maintenance process ofmechanical equipment,accurate fault location will reduce the troubleshooting time of mechanical equipment,thus improving the maintenance efficiency of mechanical equipment.In the process of fault location of mechanical equipment,the way of judging bymanpower and sound is relatively rough,which is easy to cause wrong judgment and missed judgment.Therefore,more scientificmethods are needed to realize fault detection ofmechanical equipment.
In the research ofmechanical equipment fault diagnosis,intelligent algorithm and non-linear network analysis method have received extensive attention.Through mechanical equipment vibration electronic signal acquisition and signal analysis,combined with machine learning algorithm,the recognition rate of mechanical equipment fault signals can be effectively improved,and more accurate fault classification results can be obtained.Reference[1]is an analysis of gearbox faults by combining particle swarm optimization algorithm and BP neural network,and good results have been achieved;Reference[2]uses symbolic entropy and Drosophila algorithm to identify motor bearing faults,with high classification accuracy.Mechanical equipment includes a wide range of areas.This paper uses LVQ neural network algorithm to classify the rolling bearing faults of mechanical equipment,and combines genetic algorithm to optimize,in order to improve the accuracy of fault identification.
1 Analysis of comm on fau lts ofm echanical rolling bearings
Bearing is an important part of mechanical movement and plays an important role in the design and maintenance ofmechanical parts.In this paper,rolling bearing fault is selected as the analysis object.Sensors at the fan and bearing seatof themotor collect vibration signalswhen the bearing works.Themethod of bearing fault location ismainly to detect the vibration frequency of the bearing,extract the vibration signals of the bearing periodically,and carry out frequency detection on the bearing signals[3].The structure of a general bearing is shown in Fig.1.

Fig.1 Ro IIing bearing structure
If the rotation frequency of the bearing includes rolling bodies with diameterd,the fault categories can be obtained respectively according to the fault frequency calculation formula.In accordancewith the bearing fault classification,the set is used to store the bearing fault codes,and the fault types are diagnosed according to the set.The specific bearing fault calculation formula and codingmethod are shown in table 1[4].

Tab Ie 1 Bearing fau It caIcu Iation m ethod and fau It code
For the normal state of the bearing vibration signal,the codeV=(1,0,0,0,0).direpresents the diameter of pitch circle and bearing inner ring respectively,and αis the contact angle of the two.
2 Genetic op tim ization LVQ neural netw ork fau lt diagnosis
2.1 LVQ neural network
Let the input vector beI={p1,t1},{p2,t2},{p3,t3},…{pn,tn},which contains both the input sample parameter value and the actual value of the fault type.The flow of LVQ algorithm is as follows:
(1)Arranging input vectors and carrying outmatrix processing;
(2)Calculate the distance betweenIand weights of all neuronsRin the competition layer[5]:

Wherewijrepresents the weight from the input layer neuronito the competition layer neuronj.

(3)Selectmin(di)and output the connected output neuronCi[6],then find the actual categoryCx.In relation top,ifCi=Cx,then execute the formula(3)[7-8]:

Otherwise,execute formula(4):

Wherepin formulas(3)and(4)represents the input vector,qis the number of iterations of training,and the number of output neurons iss.
(4)Continue to step(2)until the error of all equipment fault classification is within the set threshold.
Error expressed asE(e).

Whereckis the actual fault category andokis the predicted fault category.
2.2 Optimization of LVQ neural network parameters based on genetic algorithm
In order to improve the efficiency and performance of LVQ neural network fault classification,the genetic algorithm is good at solving the global optimal solution,and the shortcoming of random initial value setting of traditional LVQ neural network is abandoned,so as to improve the accuracy and efficiency of mechanical rolling bearing fault identification.
According to Table 1,factors such asdi,α,frthat affect bearing faults can be obtained,then feature vectors are constructed according tofactors such as actual power,rotating speed,vibration signal sampling frequency of equipment,and then training samples are generated according to actual fault classification results.
When the population is constructed,if the fitness of each individual is set tofi,then the selected entropy calculation of featureirepresents[9].

During the operation of the equipment,the frequency affecting the operation also changeswith time,and the change amount of bearing vibration frequencymonitored by the sensor is setasδ(H).While the probability of crossover and change of genetic algorithm isPcandPmrespectively,the expected value[10]of equipment operation at timet+1 isE[m(H,t+1)].
Along with the requirements for selecting factors of dynamic changes in equipment operation,with the purpose of ensuring that effective fault signals can be extracted in the equipmentoperation process and prevent missing and wrong detection[11],the probability of selecting cross operation mustmeet conditions in formula(8).

Then in linewithformulas(2)and(3),we can obtain:

In equation(10),if the general value ofPmis very small,then further simplification[12]of equation(11)can be continued:

IfK>1,there are:

From thiswe can recursively obtain:

Return toformula(7)and continue to solve until the correct classification number of faultsmeets the set requirements.
2.3 Fault diagnosis process for rolling bearings
The training core of the proposed algorithm is to solve the optimal solution of LVQ neural network weight and threshold value[13].After obtaining the optimal solution of weight and threshold value,the equipment fault diagnosis model of LVQ neural network can be determined.In the process of genetic algorithm optimization,the population with weights and thresholds as variables is continuously adjusted according to the fitness.The parameter adjustment method of the neural network model is efficient,and the fitness value is improved in each iteration.According to themethods[14-15]provided by the literature of bearing fault diagnosis,themain flow of equipment fault diagnosis is shown in Fig.2.
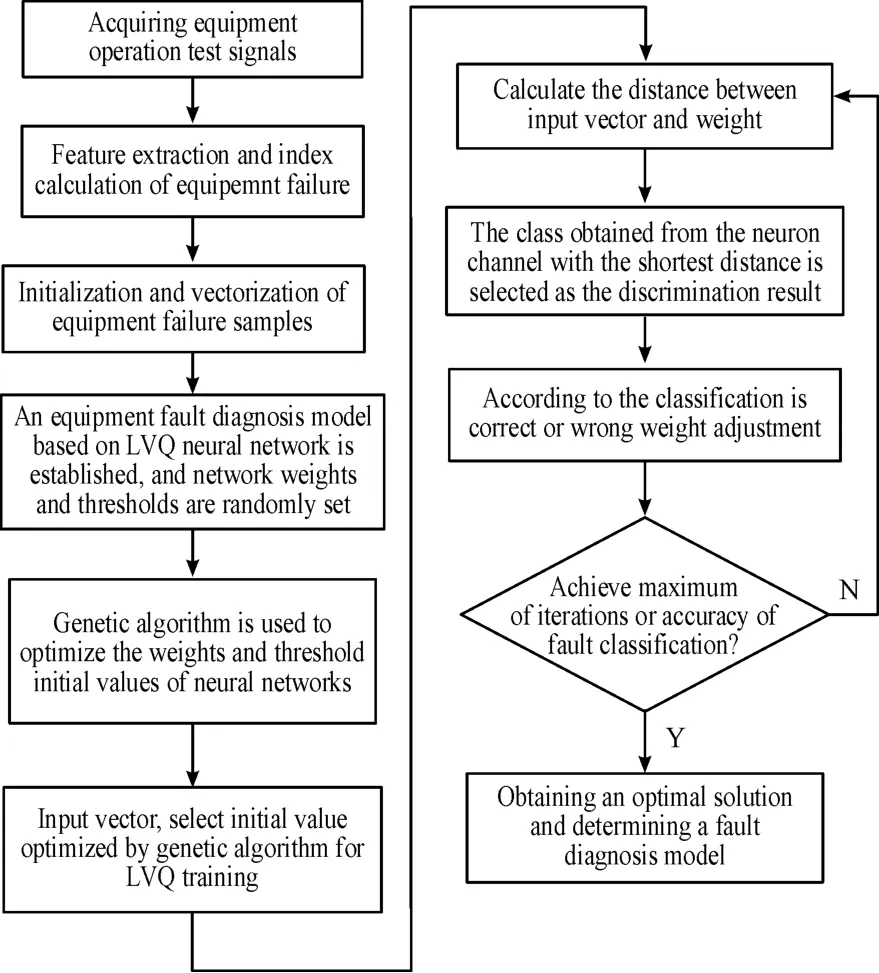
Fig.2 FIow chart of bearing fau It identification
3 Exam p le simu lation
In order to verify the performance of the algorithm in mechanical equipment fault diagnosis,the simulation is carried out on Matlab platform with the help of standard algorithm library.Five different rolling bearings are selected,and five different data sets are represented in tables to carry out example simulation.Firstly,1 000 training samples are extracted from 5 different rolling bearings respectively,then LVQ neural network rolling bearing fault identification and LVQ neural network rolling bearing fault identification optimized by genetic algorithm are respectively executed,and the accuracy and iteration times of the two are compared.Secondly,increase the sample size,optimize LVQ neural network rolling bearing fault diagnosis accuracy by genetic algorithm with different sample sizes,and further simulate.Finally,verify the robustness of the algorithm in rolling bearing fault identification.
3.1 Performance comparison of two algorithms optimization
3.1.1 Accuracy comparison
With the aim of analyzing the impact of genetic optimization on rolling bearing fault identification of LVQ neural network,the traditional LVQ neural network equipment fault classification and the proposed algorithm equipment fault classification are carried out on 1 000 samples from each of the 5 data sets.The correctmean value of classification is statistically solved according to the classification results.The simulation results are shown in Table 2.
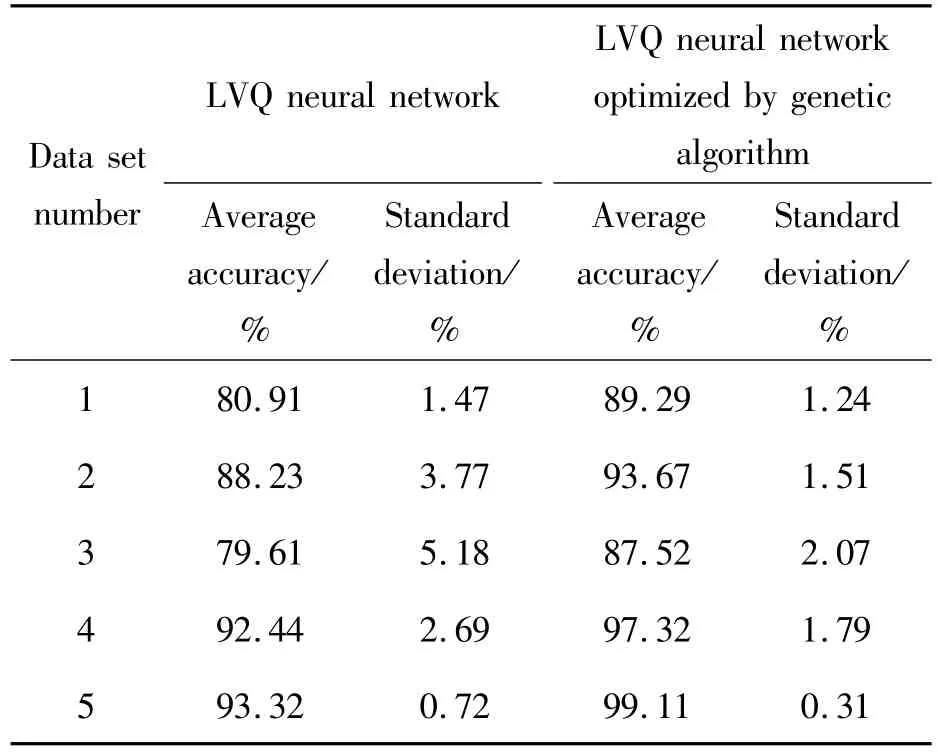
Tab Ie 2 Accuracy of the two a Igorithm s
As can be seen from Table 2,compared with LVQ neural network algorithm,the proposed algorithm has higher accuracy and better stability in equipment fault analysis.Especially for data set 5,the average accuracy and standard deviation are 99.11%and 0.31%respectively,and the fault classification performance is the best in all data sets.
3.1.2 Convergence analysis of genetic optimization
The LVQ neural network equipment fault classification and the equipment fault classification of the algorithm in this paper are respectively carried out on 1 000 samples from each of the 5 data sets,and the standard deviation when the two algorithms converge is recorded,wherein the relationship between the classification standard deviation of the fifth data set and the iteration times is shown in Fig.3.
As can be seen from Fig.3,with the increase of iteration times,the errors of the traditional LVQ neural network and the algorithm in this paper are continuously reduced,and a stable LVQ neural network fault classification model is obtained.The comparison shows that the LVQ neural network algorithm converges only when the evolutionary algebra reaches about 82 times.However,the algorithm studied in present research has completed convergence in 56 times of evolution algebra.In terms of convergence,the algorithm in this paper has obvious advantages and improves the efficiency of rolling bearing fault identification.
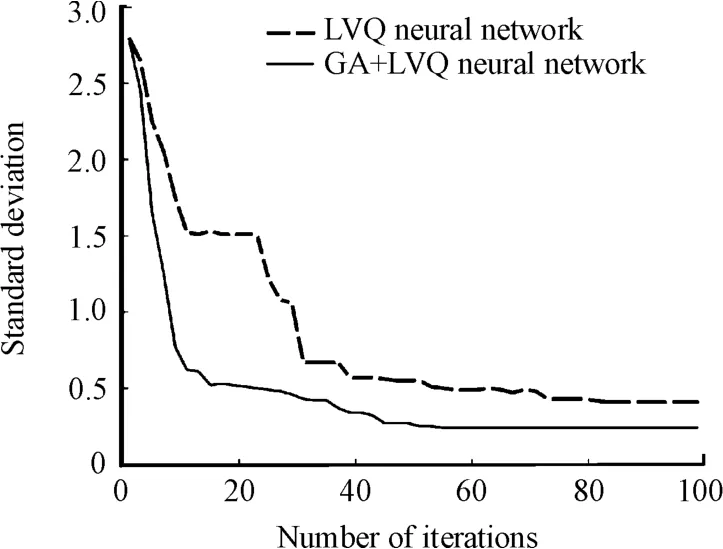
Fig.3 Com parison of convergence betw een tw o a Igorithm s
However,it can also be seen from Fig.3 thatwhen the iteration interval of LVQ neural network algorithm is[20,25],[32,37],it seems that the standard deviation basically does not change,and it seems to reach stability,but it does not converge.after continuous iterative calculation,the error becomes smaller and takes longer.However,the standard deviation of each iteration of the algorithm in this paper is decreasing,and each iteration is effective,which indicates that the genetic algorithm optimization has obvious fast convergence effecton the bearing fault classification of LVQ neural network.
3.2 Fault identification accuracy rate for different sample sizes
In order tofurther verify that the genetic algorithm optimizes the fault analysis performance of LVQ neural network,the number of training samples and test samples are changed respectively to calculate the accuracy of fault classification.The simulation results are shown in Table 3.
As can be seen from Table 3,when the number of samples changes,the change of fault identification accuracy rate is small,which is kept above 89%,indicating that the LVQ neural network optimized by genetic algorithm has high stability of equipment fault classification and will not cause wrong judgment with the increase of sample size.
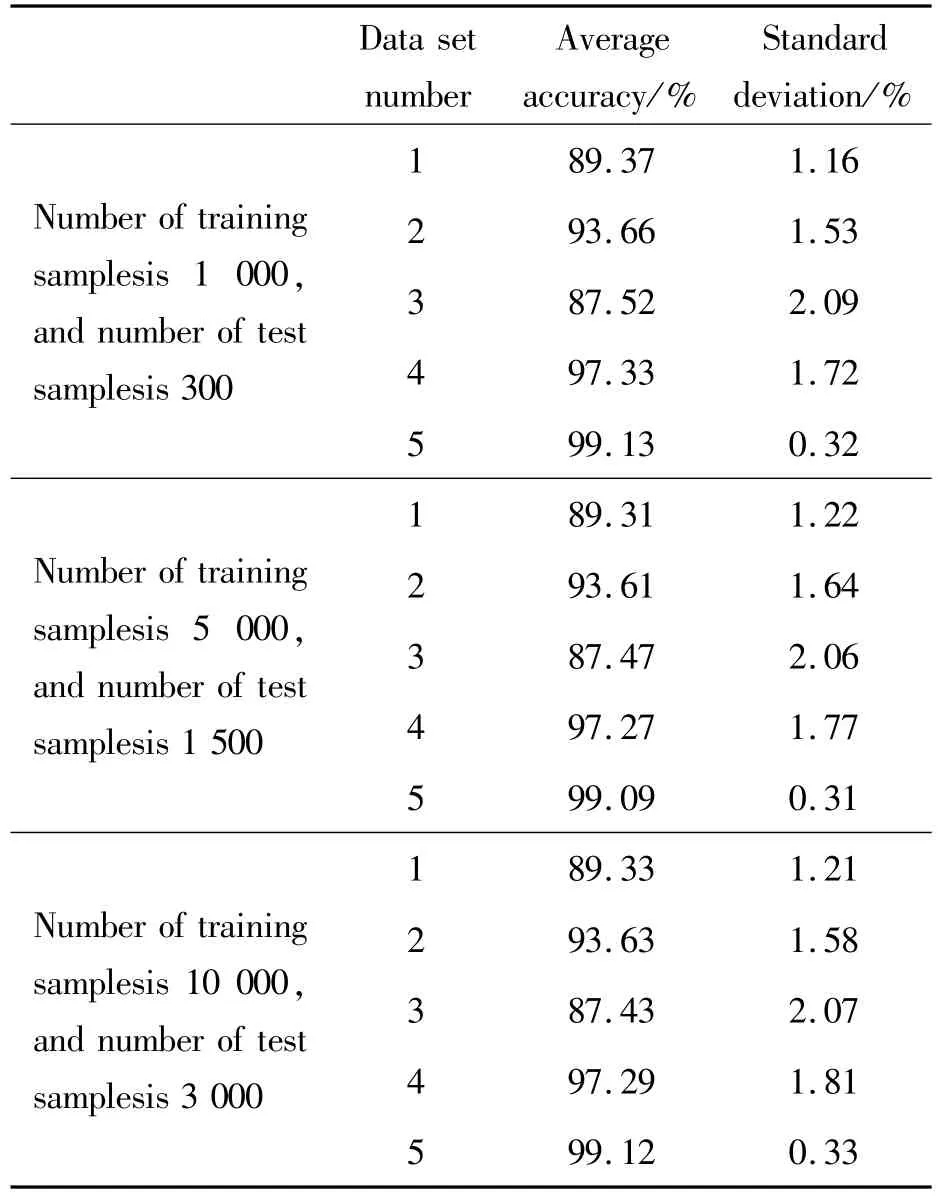
Tab Ie 3 Fau It identification accuracy of different samp Ie sizes
4 Conclusion
The algorithm proposed in this study not only gives full play to the advantages of LVQ neural network in solving non-linear problems such asmechanical equipment fault identification,but also adopts genetic optimization weights and thresholds for initial solution,whichmakes up for the problems of slow convergence and local optimization caused by fine-grained classification.Subsequent research can consider adjusting the number of neurons in the competition layer of LVQ neural network so as tofurther improve themechanical equipment fault discrimination performance of LVQ neural network.

- 机床与液压的其它文章
- Study on Face detection method based on lightweight convolutional neural network
- Research on sliding mode control of manipulator based on RBF neural network optim ized by bionic swarm intelligence
- Research on bearing fault diagnosis technology based on deep convolution neural network
- Research on the application of improved machine learning collaborative recommendation algorithm in intelligent control
- Design of liquid filling machine positioning system based on RBFneural network activedisturbance rejection controller
- Kinematics and dynam ic performance analysis of a 3-R2H2S parallel robot