
Research on bearing fault diagnosis technology based on deep convolution neural network
2020-12-23 05:16:12LeiXIAOLiluGUOJingzhongGANChaochenTANG
机床与液压 2020年18期
Lei XIAO,Li-lu GUO,Jing-zhong GAN*,Chao-chen TANG
(1 College of Computer Science and Technology,Yulin Normal University,Guangxi537000,China)
(2 College of Computer Science and Technology,Xidian University,Xi’an 710000,China)
(3 School of Telecommunications Engineering,Xidian University,Xi’an 710000,China)
(4 School of Information Science and Engineering,Guilin University of Technology,Guangxi541004,China)
Abstract:In order to improve the accuracy of bearing fault diagnosis,the depth convolution neural network algorithm is used to realize bearing fault classification.Firstly,the bearing fault database is established according to the characteristic frequency of bearing vibration fault,then the vibration signal of bearing is periodically extracted according to different slice length and fixed width,and the feature vectormatrix is established.Then the fault diagnosismodel of deep convolution neural network is established.In the network design,the convolution kernel and pool size are set differently,and the core parameters of neural network training are optimized.Finally,a stable convolution neural network model is obtained.The simulation results show that the bearing fault classification based on deep convolution neural network has high accuracy and small standard deviation.
Key words:Deep convolution neural network,Bearing fault,Convolution kernel,Pooling,Segmentation length
Bearing is an important part ofmechanicalmotion,which plays an important role in the design and maintenance ofmechanical parts.The bearing has a long running time,complex working environment and easy to be damaged.in the maintenance process of mechanical equipment,there is an urgent need for regular fault diagnosis and maintenance of the bearing in order to ensure the normal operation of themechanical equipment.With the wide application of machine learning algorithm,the method of identifying bearing faults simply by seeing and listening is not accurate enough,and it is impossible to identify shallow faults[1].Therefore,by using the methods of electronic signal extraction and signal analysis,combined with machine learning algorithm,the recognition rate of bearing fault signals can be effectively improved and more accurate bearing classification results can be obtained.
There aremany researches on the analysis of bearing faults,and scholars havemade abundant research achievements in improving the accuracy of bearing faults.In Liu and Chen(2017)[2]BP neural network is used to classify the faults of rolling bearings,and the classification effect is obvious.Zhang et al.combines vectormachines and wavelet packets to complete bearing fault signal classification[3].In Ma et al.(2019)[4]the wavelet analysis is still adopted,but the extraction of fault signals adopts adaptive frequency instead of fixed period extraction,which effectively improves the efficiency of fault identification.In this paper,the deep convolutional neural network is applied to the bearing fault signal classification,and the bearing vibration signal is deeply trained tofurther improve the bearing fault recognition rate and classification accuracy.
1 Deep convolutional neural network
In a deep convolution neural network structure,there are multiple convolution layers.Samplexextracts and crosses the image features through the continuous operation of the convolution layer.The convolution operation method[5]of samplexcontainingMfeatures in layeriis

Among them,andBlrepresent the convolution kernel and bias function corresponding to thej-th input of the neuroniin layerlrespectively.There are many types off(·)function.In this paper,the sigmoid function is selected as the feature conversion function.

In the convolution operation,the original image is extracted by block pixels,and then pooled operation is carried out respectively.
The square size selected during pooling ism*m.In practice,considering the efficiency of sample size and convolution pooling operation,the size of pooling step can be selected flexibly.The mathematical description of the two methods[6]is shown in formula(3)and formula(4).

In this paper,themaximum pooling operation is selected as themainmethod of depth convolution,so the output result of the picture of sizeh×waftermultiple maximum pooling isyi,j.

For the full connection layer,the following can be used as

Wherewjirepresents the input weightiof the layer l neuronj,andf(·)is the sigmoid function.
Assuming that there areMnodes in the output layer[7],the error termδkfor the nodekin the output layer isδk.

Wheredkis the target output of nodekandykis the predicted output of nodek.
Assuming that the current layer is thellayer withLnodes and thel+1 layerwithMnodes,the error term for the nodejof the l layer isδj.

Wherehis the output andwis theweight from neuronjto neuronkin layer1.The updatemethod[7]is formula(9).

Whereηis the learning rate,and the change of the threshold is calculated is formula(10).

Adjust the weights,and the updated weights arewjk(n+1).

The updated threshold isBk(n+1).

Repeat until the error function is less than the set threshold,where the error function isE.

Solve theweight value and offset of each layerwhen the algorithm stops,and determine the results of the deep convolution neural network model.
2 Bearing fau lt analysismodel
2.1 Frequency analysis of bearing fault
The method of accurately locating the fault of the bearingmainly depends on detecting the vibration frequency of the bearing,extracting the vibration signal of the bearing periodically,detecting the frequency of the bearing signal[8],and setting the rotation frequency of the bearingfr,which containsNrolling bodies.Then the fault category and calculation method[9]are shown in Table 1.
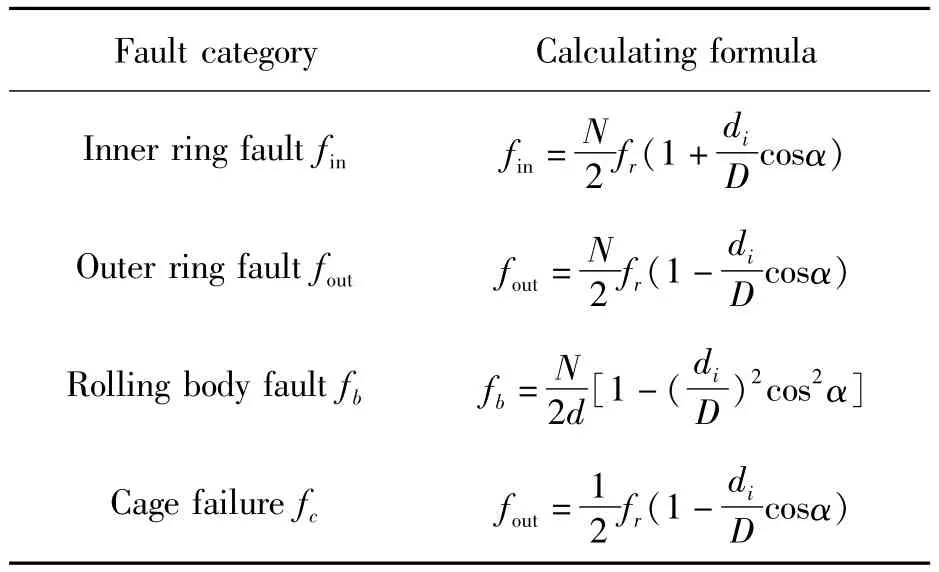
Tab Ie 1 Bearing fau It category
WhereDanddiare the inner ring diameter of the bearing respectively,andαis the contact angle.
2.2 Main process of bearing fault diagnosis
According to the common analysismethods of electronic signal waveforms,combined with the methods provided by the literature of bearing fault diagnosis,themain process[10-11]of bearing fault diagnosis is shown in Fig.1.
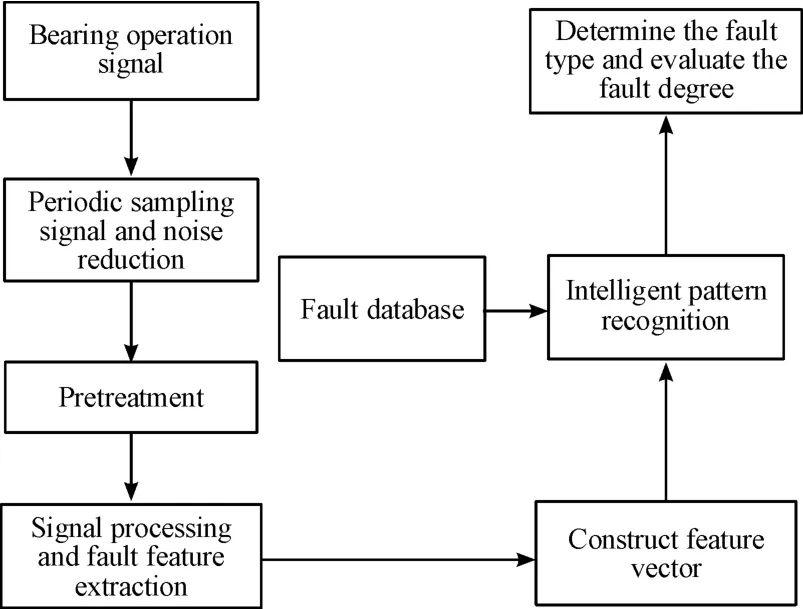
Fig.1 Genera I fIow of bearing fau It interp retation
After the bearing fault signal is extracted,the fault feature vector is constructed through feature extraction.Then,the feature vector is trained effectively by certain learning methods,and the bearing fault database is established according to the fault feature frequency.The established fault database and diagnose the fault type are compared.
2.3 Fault diagnosis based on deep convolution neural network
According to the bearing fault diagnosis process in Fig.1,this paper uses the deep convolution neural network algorithm to complete the bearing fault pattern recognition,and takes the error function threshold as the criterion ofwhether the algorithm stops[12].The specific flow chart is shown in Fig.2.

Fig.2 Fau It c Iassification fIow based on deep convo-Iution neura Inetwork
3 Case sim u lation
In order to verify the performance of deep convolution neural network in bearing fault diagnosis,three different rolling bearings are selected,and the table represents three different data sets,and an example simulation is carried out.Firstly,the accuracy of three different rolling bearings is simulated,and then the depth convolution neural network simulation is carried out according to different convolution kernel sizes.Finally,the influence of different slice length on the accuracy of fault classification is verified.
3.1 Accuracy of bearing fault diagnosis
According to Section 2.1,combined with deep convolution neural network training,the number of output neurons should be 5,which represents the four types of fault state and normal operation state of bearing operation respectively.The value of the output neuron and the corresponding bearing failure are shown in Table 2.
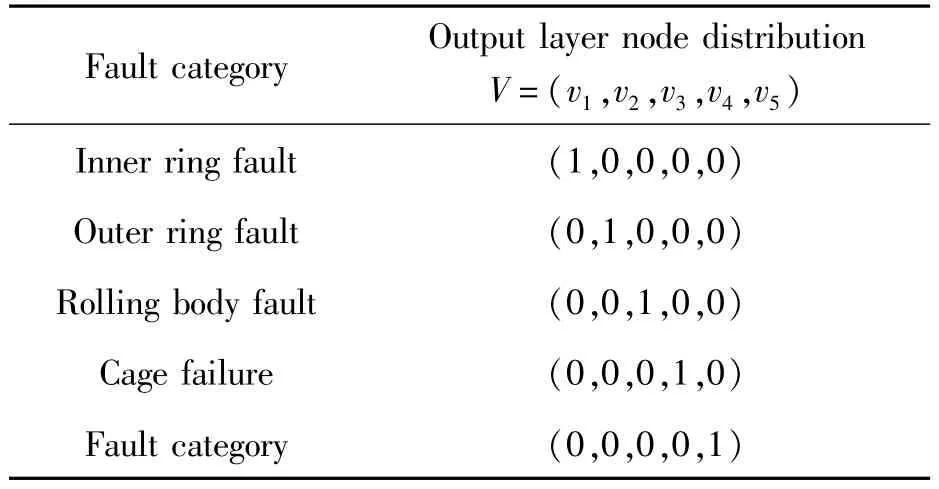
Tab Ie 2 Bearing operation
The three different data sets are extracted periodically.The slice length is 20 and the fixed width is 5 000,the convolution kernel size is 3×3 and the pool width is 2×2.Themodel is used to simulate the bearing operation data aftermany operations.The results of the three different data sets are shown in Table 3.
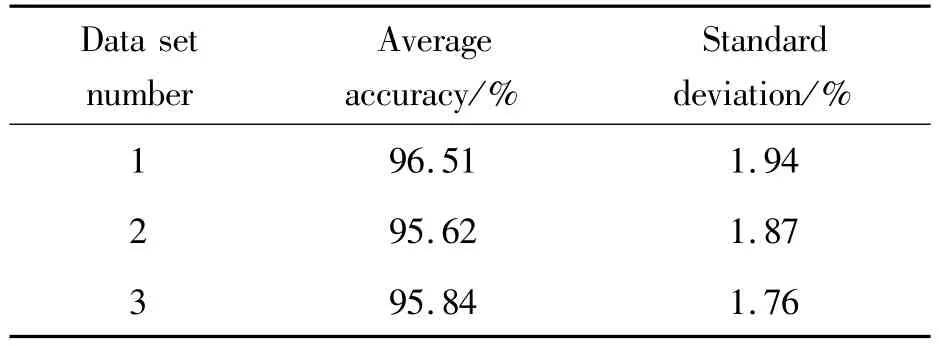
Tab Ie 3 Simu Iation output resu Its of deep convo Iution neura Inetwork
It can be seen from Table 3 that according to the set period extraction parameters and the convolution kernel poolmain parameters of the deep convolution neural network,the fault classification has achieved good results,and the accuracy of three different bearing fault classification has reached more than 95%.The standard deviation is controlled within 2%.
3.2 Accuracy of fault classification with different convolution kernel sizes
The size of the convolution kernel directly affects the calculation and storage of the convolution operation,aswell as the efficiency of thewhole fault classification.The convolution kernel size is set to 2×2,3×3,4×4 and 5×5 respectively to verify the influence of different convolution size on the accuracy of fault classification.
It can be seen from Table 4 thatwhen the convolution kernel size increases,the average accuracy and standard deviation performance decrease.Although the convolution kernel size increases and the amount of computation decreases,the accuracy decreases.In the actual operation,the convolution kernel size needs to be flexibly set according to the classification accuracy.
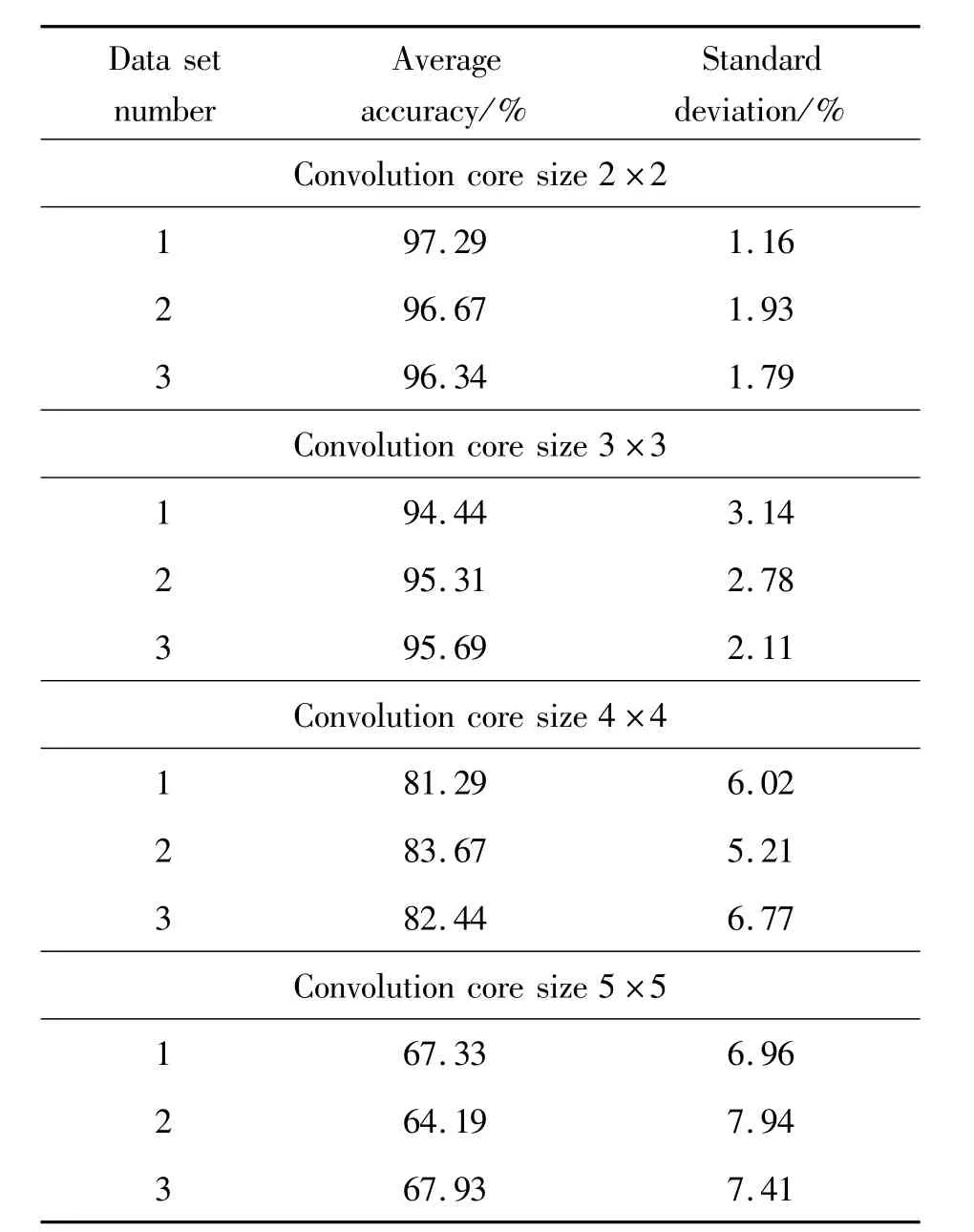
Tab Ie 4 Fau It c Iassification accuracy of different convo Iution kerne Isizes
3.3 Accuracy of fault signals with different segmentation lengths
In the fault signal extraction,the bearing waveform is obtained according to the periodic time period;the original fault signal needs to be segmented according to a fixed width and a certain step to extract the period;then the depth convolution neural network analysis is carried out.Below,the fault signal data sets of three different bearings are periodically extracted according to the fixed width 5 000 and different slice steps,and the number of extracted data samples is shown in Table 5.
It can be seen from Table 5 that the smaller the segmentation length is,the more samples are generated when the fault signal is extracted according to the fixed width 5 000.When the segmentation length is 10∶00,the data samples of datasets 1,2 and 3 reach 78 130,81 520 and 87 630 respectively.Below,we will conduct deep convolution neural network training for data sets with different segmentation lengths,and the results are shown in Table 6.

Tab Ie 5 Num ber of data sets generated by different segm entation Iength
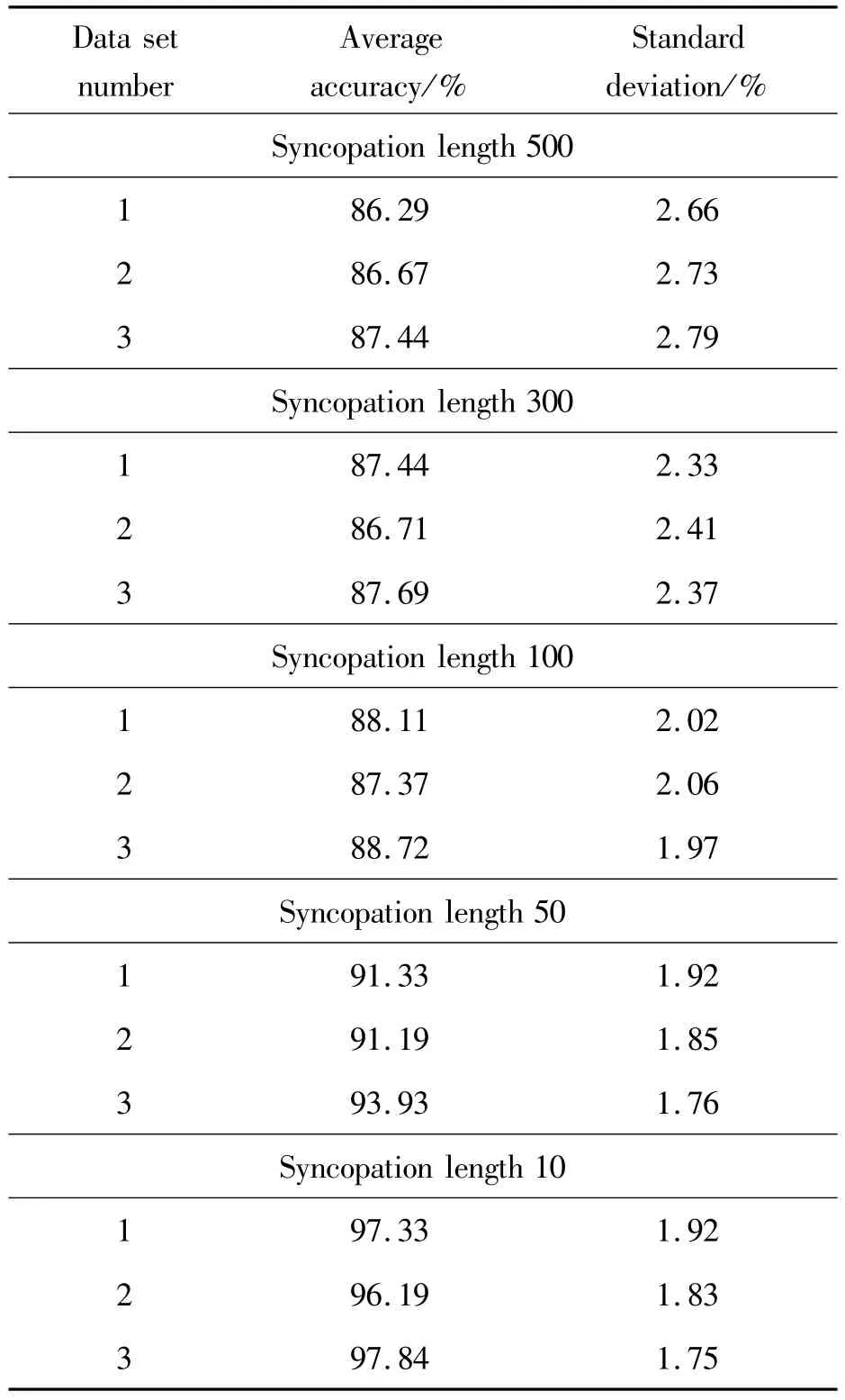
Tab Ie 6 Fau It c Iassification accuracy corresponding to different segm entation Iength
It can be seen from Table 6 that when the slice length increases and the number of samples increases,the accuracy of fault classification of the three bearings continues to rise.When the segmentation length is 10∶00,the highest fault accuracy of the three bearing samples is 97.84%.The standard deviation also decreases with the decrease of the split length,but when the slice length is 50 and 10∶00,the standard deviation of the three data sets tends to be stable,keeping at about 1.92%,1.83%and 1.75%,respectively.Through the analysis,it can be seen that when the number of samples increases,the performance of average accuracy and standard deviation are improved.However,the increase of sample size is bound to increase the training time of deep convolution neural network.Therefore,in practical application,appropriate slice length should be set to balance the accuracy of fault classification and the operation time of deep convolution neural network,so as to improve the applicability of deep convolution neural network in bearing fault classification.
4 Conclusion
In this paper,deep convolution neural network is used to classify bearing faults,and the effect is good.In the process of establishing the actual fault classificationmodel,the segmentation length and convolution kernel size should be set flexibly to achieve better classification results.In follow-up research,the core parameters of deep convolution network,such as pool width,number of convolution layers and convolution kernel size,will be set differently,and the network trainingmodel will be adjusted continuously so as to optimize the bearing fault classification model of deep convolution neural network and improve the applicability of thismethod to bearing fault classification.

- 机床与液压的其它文章
- Study on Face detection method based on lightweight convolutional neural network
- Application of genetic optim ization lvq neural network in equipment fault diagnosis system
- Research on sliding mode control of manipulator based on RBF neural network optim ized by bionic swarm intelligence
- Research on the application of improved machine learning collaborative recommendation algorithm in intelligent control
- Design of liquid filling machine positioning system based on RBFneural network activedisturbance rejection controller
- Kinematics and dynam ic performance analysis of a 3-R2H2S parallel robot