
深空探测器指向机构可靠性设计研究
2020-12-22 10:36张朴真何永强徐燕菱杨建中
机电产品开发与创新 2020年6期
张朴真, 何永强, 徐燕菱, 杨建中, 冀 巍
(1.北京空间飞行器总体设计部, 北京 100094; 2.天津航天机电设备研究所, 天津 300301)
0 引言
进入21 世纪,深空探测再次迎来发展高峰期[1]。 自2003 年以来,各航天强国纷纷推出新的深空探测发展战略、规划和计划,并力求建立全球空间探测战略与结构体系,为了寻找天体中水和生命的迹象,实现一系列科学目标,全面展开对整个太阳系以及更远深空的探测。
随着深空探测任务越来越复杂,任务周期越来越长,也暴露出了一系列问题[2],特别是对于任务周期超长的小天体采样探测,超长的任务周期、超远的器地距离与不断变化的太阳高度角、器地连线方向、有效载荷探测方向等要求指向机构具有极高的精度,同时具有极高的可靠性,以实现长期稳定指向。
指向机构是指通过单轴或多轴转动使负载具备特定的姿态的装置。 指向机构一般由压紧释放机构、驱动组件、传动组件、控制组件、连接结构等组成[3]。 指向机构是深空探测器的重要组成部分,例如太阳翼、定向天线、桅杆等。
与近地轨卫星机构相比,深空探测器指向机构具有以下特殊性:①空间特殊环境的适应性:极端高低温交变,尘埃云与高能粒子,行星表面重力场、磁场,风场及尘埃等,均会对航天器材料力学性能、表面状态、机构运动副摩擦力、电子元器件功能与寿命等造成影响,进而影响空间机构的可靠性和安全性。因此,相比于一般的空间机构,深空探测器指向机构需在继承性设计的基础上针对空间环境;②不可维修性:虽然随着空间技术的发展,航天飞机、空间站等飞行任务实现了空间飞行器的在轨维修、 更换和维护,但从人类的现有技术水平来看,很长时间内深空探测机构都不具有在轨维修和更换的可能性。 因此,相比于一般空间机构,深空探测器指向机构需要考虑材料疲劳、老化等寿命问题,确保能在规定的寿命时期内可靠地工作;③轻质要求:由于极高的发射成本,深空探测器对部组件重量、体积要求极为严苛,指向机构在设计时需兼顾极高可靠性需求与最小的重量、体积代价;④功耗限制:探测器与太阳距离的增大,单位面积的太阳能功率低,能源紧张,对部件和设备功耗有严格的限制,指向机构在驱动组件设计时需兼顾裕度与功耗。 针对上述特殊性,我们必须采取针对性的措施,在有限的质量、功耗资源下提升指向机构的可靠性。
1 设计
1.1 材料及工艺选取
深空探测器指向机构材料的选用, 需根据载荷条件及使用工况确定材料的刚度、强度、热匹配性需求,在符合航天标准的优选目录中选取合适的材料范围, 根据其空间环境适应性选取合适的热处理、表面处理工艺,并使材料密度最低,并在经过认证的生产厂家、规格及技术条件目录中选用, 且该材料应经过飞行验证或开展了相应的鉴定试验。
1.2 润滑设计
深空探测面临±100℃甚至更宽的温度交变环境,而温度直接影响润滑材料的性能, 空间润滑设计对保证指向机构在空间环境中的正常运行至关重要。 指向机构的润滑主要集中在驱动组件、传动组件中,具体部位主要包括轴承、行星减速器和谐波减速器。 由于润滑油、脂在低于倾点下会发生粘滞甚至卡死, 因此深空探测器指向机构通常采用固体润滑或脂润滑+热控措施。
(1)轴承的润滑。 驱动组件电机端和传动组件中的深沟球轴承的润滑采用沟道溅射MoS2基复合润滑膜作为初始润滑膜并辅以PTFE 基自润滑保持架的固体润滑方式。
(2)行星减速器、谐波减速器的润滑。 行星减速器与谐波减速器通常单独或组合使用, 一般在齿面采用表面溅射MoS2固体润滑; 或在齿面采用表面处理提升硬度+润滑脂润滑方式,并采用防爬移技术,防止润滑脂的爬移损失。由于环境温度低于润滑脂倾点温度时,需使用主动热控措施加热润滑部位至倾点温度以上机构才能正常运行,功耗大且时间长,因此一般情况下还是以固体润滑为主。
1.3 防尘设计
小天体表面附着的大量松软土壤或尘埃容易在探测器着陆或采样过程中被激励以至飞溅,火星等固态行星在风场作用下往往形成扬尘甚至沙尘暴现象。颗粒物一旦进入轴承或减速器啮合面会加剧磨损形成更多颗粒甚至导致卡死。因此需在指向机构驱动组件的转动和固定分离面上采用迷宫式密封加接触式密封的结构型式。
迷宫设计就是通过多个拐角和小的间隙, 构成类似迷宫的结构,防止小颗粒直线运动进入。接触式密封设计采用润滑性能好的聚四氟乙烯材料加工一个密封环,放置在固定部分和转动部分之间, 通过微过盈的尺寸控制将聚四氟乙烯微压缩,封死与外界的空间通道,避免通过迷宫的颗粒进入驱动机构的轴系。 由于聚四氟乙烯材料与密封面产生滑动摩擦,因此要求摩擦表面需光滑,且要控制聚四氟乙烯的过盈量, 避免较大的应力产生过多的聚四氟乙烯磨屑。
通常驱动组件壳体外表面会整体包覆隔热材料,本身也可以作为第一层遮挡,能够阻挡绝大部分颗粒,大大减少了颗粒进入驱动组件的可能性。
1.4 冗余设计
除了对特定的空间环境与工况采取特殊设计外,需要在质量约束下,以确保重要功能为目标,对指向机构的重要组成部分采取热备份或冷备份的措施, 进一步增加设计的可靠性。指向机构的主要功能是入轨前可靠压紧,在轨后可靠解锁,工作过程中在一定角度范围内可靠、安全运行。
针对压紧、解锁问题,压紧释放机构所使用的火工品通常具备双点火器,只要一个点火器发火,即可动作。 同时点火器系钝感型电点火器,长时间施加小电流不发火,短时间大电流瞬时发火,同时具备良好的抗静电能力。
针对可靠运行问题,在驱动组件的设计中,对驱动源即(电机)、测角元件(旋转变压器)可采取使用双绕组备份设计。 并在控制器中对控制电路及各功能电路也采用一主一备的冗余设计,与绕组一一对应,必要时也可以交叉使用。
针对在一定角度范围内安全运行的问题, 控制器软件根据旋转变压器反馈的实时角度,设计了软件限位,当驱动组件运动角度超过一定角度(例如0.5°)以上时会触发软件限位开关,并产生限位信号,提供给控制电路,控制电机停止运动。 同时,在略大于软件限位角度的位置,设置了机械硬限位以确保安全。
2 分析
以火星表面探测器为例对指向机构的力矩裕度与可靠度进行定量计算。
2.1 裕度分析
根据驱动力矩、阻力矩、重力矩等驱动特性,如表1所示,对其火星工作工况下、地面试验工况下的静力矩裕度与动力矩裕度进行分析。

表1 指向机构驱动特性汇总表Tab.1 Summary of the pointing mechanism’s driving characteristics
静力矩裕度按公式(1)[4]计算,并应不小于1.75:

其中T驱、T重、T惯、T阻分别为驱动力矩、重力矩、惯性力矩、阻力矩。
火星重力环境下的静力矩裕度按公式(2)计算,并应不小于0.5:

通过计算,指向机构各轴的力矩裕度如表2 所示。

表2 指向机构各轴力矩裕度Tab.2 Moment margin of the pointing mechanism’s axes
由计算可知,火星重力环境下,指向机构各轴均满足静力矩裕度和保持力矩裕度要求。地球重力环境下,轴系A 重力矩大于驱动力矩和保持力矩, 不满足静力矩裕度和保持力矩裕度的要求,因此在地面测试过程中,需要对该轴采取重力卸载措施,避免不必要的损伤。
2.2 可靠性定量分析
为了定量分析指向机构的可靠性, 需要对机构的整个任务剖面进行分析, 并明确成功定义, 建立可靠性模型,并对各部分可靠性进行赋值,通过运算获取整个机构的可靠性[5]。
2.2.1 任务剖面
指向机构从发射直到着陆火星工作,可以按照飞行过程和着陆工作阶段两个时间剖面进行可靠性分析,见表3。

表3 指向机构任务剖面Tab.3 Mission profiles of the pointing mechanism
与一般空间机构产品比较,火星指向机构的特殊性主要在于环境条件,对机构可靠性提出了更高的要求,包括:
(1)探测器在轨时间长,指向机构在经历长时间轨道环境条件下的贮存后才开始运动,即地火转移不超过12个月;环火飞行不超过6 个月;火星表面运行90 个火星日(约92 个地球日)。
(2)指向机构产品要承受着陆火星的冲击载荷及火星重力。
(3)指向机构产品要承受火星工作温度条件,更为恶劣。
(4)火星上存在大气,会出现尘暴天气,因此对产品防尘能力的要求较高。
2.2.2 成功定义
指向机构任务成功定义,见表4。

表4 指向机构任务成功定义Tab.4 Mission success definition to the pointing mechanism
2.2.3 可靠性模型建立
根据指向机构的工作模式, 其各组成部分基本上是串联结构,可靠性框图如图1 所示。

图1 指向机构可靠性框图Fig.1 Reliability block diagram of the pointing mechanism
2.2.4 可靠性预计
指向机构可靠度预计见表5。
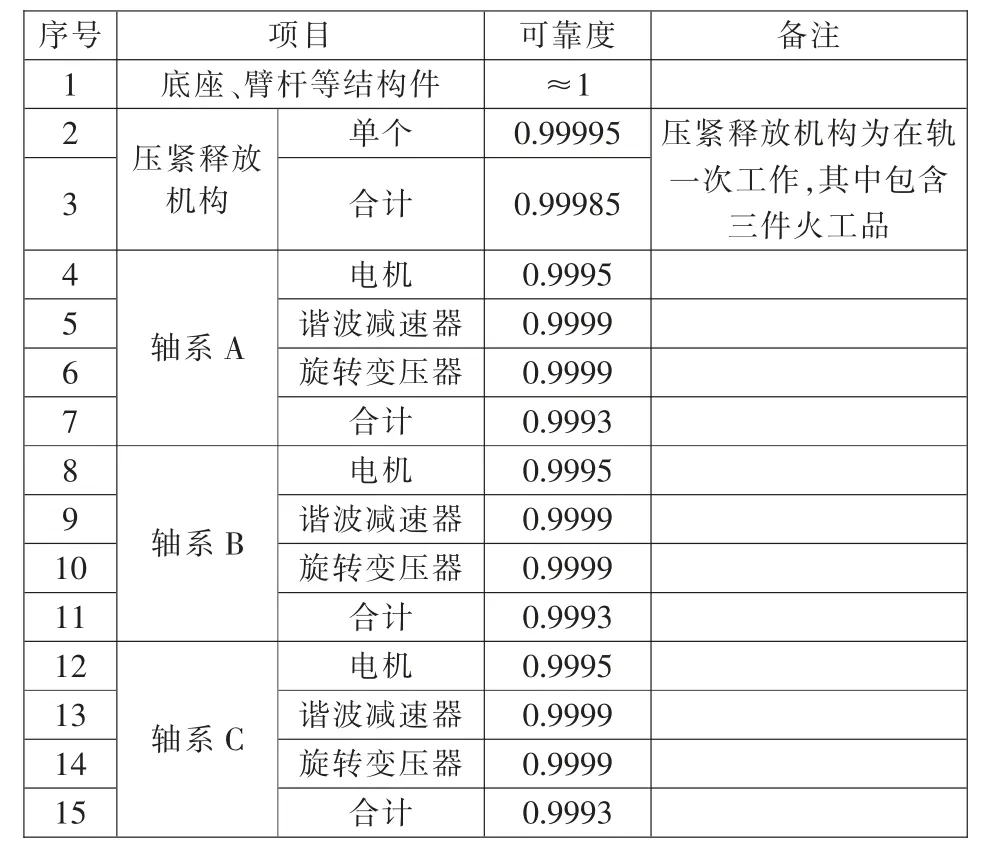
表5 指向机构可靠度预计表Tab.5 Reliability prediction of the pointing mechanism
指向机构在轨飞行阶段的可靠度由压紧释放装置的压紧可靠度决定。压紧释放装置经过预紧后为刚性连接,可认为可靠度近似为1,因此指向机构飞行阶段的可靠度为1。
指向机构在火星表面工作的可靠度由压紧释放机构、轴系A、轴系B 和轴系C 的可靠度决定,因此指向机构在火星表面工作阶段的可靠度为四者可靠度之积,即0.9978。
3 试验
在设计与分析满足工程需要后,需对样机进行完整的鉴定试验,确保其部件、组件均能满足要求并验证设计与分析结果。试验过程中,力、热等工况加载方式尽量模拟真实边界,载荷量级需考虑一定裕度,具体试验项目见表6。

表6 试验项目Tab.6 Test items
4 结论
本文对深空探测器指向机构可靠性设计与分析、试验工作进行了探讨,并以火星探测器指向机构为例,给出了其力矩裕度与可靠性定量计算方法, 同时给出了试验验证方案, 可以为后续深空探测器指向机构可靠性设计提供有益参考。
猜你喜欢
电气电子教学学报(2022年3期)2022-07-30
中国特种设备安全(2022年2期)2022-07-08
中国舰船研究(2022年1期)2022-03-19
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28
宇航总体技术(2018年5期)2018-10-15
通信电源技术(2018年7期)2018-09-23
传媒评论(2017年8期)2017-11-08
山东青年(2016年12期)2017-03-02
航天制造技术(2016年6期)2016-05-09
探测与控制学报(2015年4期)2015-12-15
